Lalanne C. Mechanical Vibrations and Shocks: Mechanical Shock Volume II
Подождите немного. Документ загружается.

274
Mechanical shock
simplifies
the
construction
of
complex spectra. Variations can, however,
be
observed
between
the
specified
and
carried
out the
shock spectra, which
had
with
nonlinearities
of the
assembly, with
the
noise.
In
general, these variations
do not
exceed 30%.
The
peaks
of an
acceleration signal built
from
SHOC
functions
are
positive
in a
dominating way.
For
certain
tests,
one can
carry
out a
shock which roughly
has an
equal
number
of
positive peaks
and
negative peaks
with
a
comparable amplitude.
This
can be
accomplished
by
alternating
the
signs
of the
various components. This
alternation
can
lead,
in
certain
cases,
to a
reduction
in the
displacement necessary
to
carry
out the
specified spectrum.
9.7.
Comparison
of the
WAVSIN,
SHOC
waveforms
and
decaying
sinusoid
The
cases
treated
by
D.O. Smallwood [SMA 74a] seem
to
show that these three
methods
give similar results.
It is
noted ,however,
in
practice that, according
to the
shape
of the
reference spectrum,
one or
other
of
these waveforms allows
a
better
convergence.
The
ZERD waveform very
often
gives
good
results.
9.8.
Use of a
fast
swept
sine
The
specified shock response spectrum
can
also
be
restored
by
generation
of a
fast
swept
sine.
It is
pointed
out
that
a
swept sine
can be
described
by a
relation
of
the
form
(Volume
1,
Chapter
7)
where
for a
linear sweep
(f = b t + fj)
f| is the
initial
frequency of
sweep
and b the
sweep
rate.
The
number
N
b
of
cycles
f
l
+ f
2
carried
out
between
f1 and f
2
for the
duration
T is
given
by N
b
= T. The
2
signal
describing
this sweep presents
the
property
of a
Fourier transform
of
roughly
constant amplitude
in the
swept
frequency
band, being represented
by
[REE 60]:
From
these results,
for the
method which makes
it
possible
to
determine
the
characteristics
of a
fast
swept sine
from a
response spectrum [LAL 92b]:
- one
fixes
the
number
of
points
N of
definition
of
the
swept sine signal;
- one is
given
a
priori,
to
initialize calculation,
a
number
of
cycles
(N
b
=12 for
example),
from
which
one
deduces
the
sweep duration
-between
two
successive points (f
i,
SRS,)
and
(fj+j,
SRSj
+1
)
from the
specified
spectrum,
the frequency of the
signal
is
obtained
from the
sweeping
law
f
= bt + f
i;
- the
amplitude
of the
sinusoid
at the
time
t
corresponding
to the frequency f
included between
^ and
f
i+
i
is
calculated
by
linear interpolation according
to
amp =
(the constant
1.3
makes
it
possible
to
hold account
of the
fact
that
the
relation
[9.73]
is
valid only
for one
zero damping whereas
the
spectra
are in
general plotted
for a
value equal
to
0.05. This constant
is not
essential,
but
makes
it
possible
to
have
a
better result
for the
first
calculation);
- one
deduces,
starting
from
[9.71],
the
expression
of
the
signal:
The first
part
of the
response spectrum (SRS)
consists
of the
residual spectrum
(low
frequencies).
Knowing that,
for
zero damping,
the
residual shock response
spectrum
S
R
is
related
to the
amplitude
of the
Fourier transform
by
we
have,
by
combining
[9.72]
and
[9.73]
and
the
sweep rate
276
Mechanical shock
- by
integration
of
this signal
of
acceleration,
one
calculates
the
associated
velocity change
AV (by
supposing
the
initial velocity equal
to
zero).
By
comparison
with
the
velocity change
AV
0
read
on the
specified response spectrum (given
by the
slope
at the
origin
of
this spectrum, calculated
from the
first
two
points
of the
spectrum
and
divided
by 2
TI),
one
determines
the
duration
and the
number
of
cycles
N
b
(up to now
selected
a
priori) necessary
to
guarantee
the
same change velocity
from
-
with
the
same procedure
as
previously,
one
realizes
a
re-sampling
of
the
signal
x(t);
- the
response spectrum
of
this waveform
is
calculated
and
compared with
the
specified
spectrum. From
the
noted variations
of
each
N
points,
one
readjusts
the
amplitudes
by
making three rules.
One
to two
iterations
are
enough
in
general
to
obtain
a
signal
of
which:
- the
spectrum
is
very close
to the
specified spectrum;
- the
amplitude
and the
velocity change
are of the
same order
of
magnitude
as
those
of the
signal having been used
to
calculate
the
specified spectrum.
This signal,
to be
realizable
on the
shaker, must
be
modified
by the
addition
of a
pre-shock
and/or
a
post-shock
ensuring
an
overall zero velocity change.

Control
of a
shaker using
a
shock
response
spectrum
277
Example
Let us
suppose that
the
specified spectrum
is the
shock spectrum
of a
half-sine
waveform,
of
amplitude
500
m/s
2
and of
duration
10 ms
(associated velocity
change: 3.18 m/s).
Figure 9.31 shows
the
signal obtained
after
three iterations carried
out to
readjust
the
amplitudes (without pre-
or
post-shock)
and
Figure 9.32
the
corresponding response spectrum, superimposed
on the
specified spectrum.
Figure
9.31.
Example
of
fast swept sine
Figure
9.32.
SRS
of
the
equivalent
swept
sine
to the SRS
of
a
half-sine
shock
The
velocity change
is
equal
to 3
m/s,
the
amplitude
is
very close
to 500
m/s
2
and
the
duration
of the first
peak
of the
signal, dominating,
is
close
to 10 ms.
This method
is
thus
of the
interest
to
coarsely
represent
the
characteristics
of
amplitude, duration
and
velocity change
of the
signal
at the
origin
of the
specified
spectrum.
It has the
disadvantage
of not
always converging according
to the
shape
of
the
specified spectrum.
.
.
278
Mechanical shock
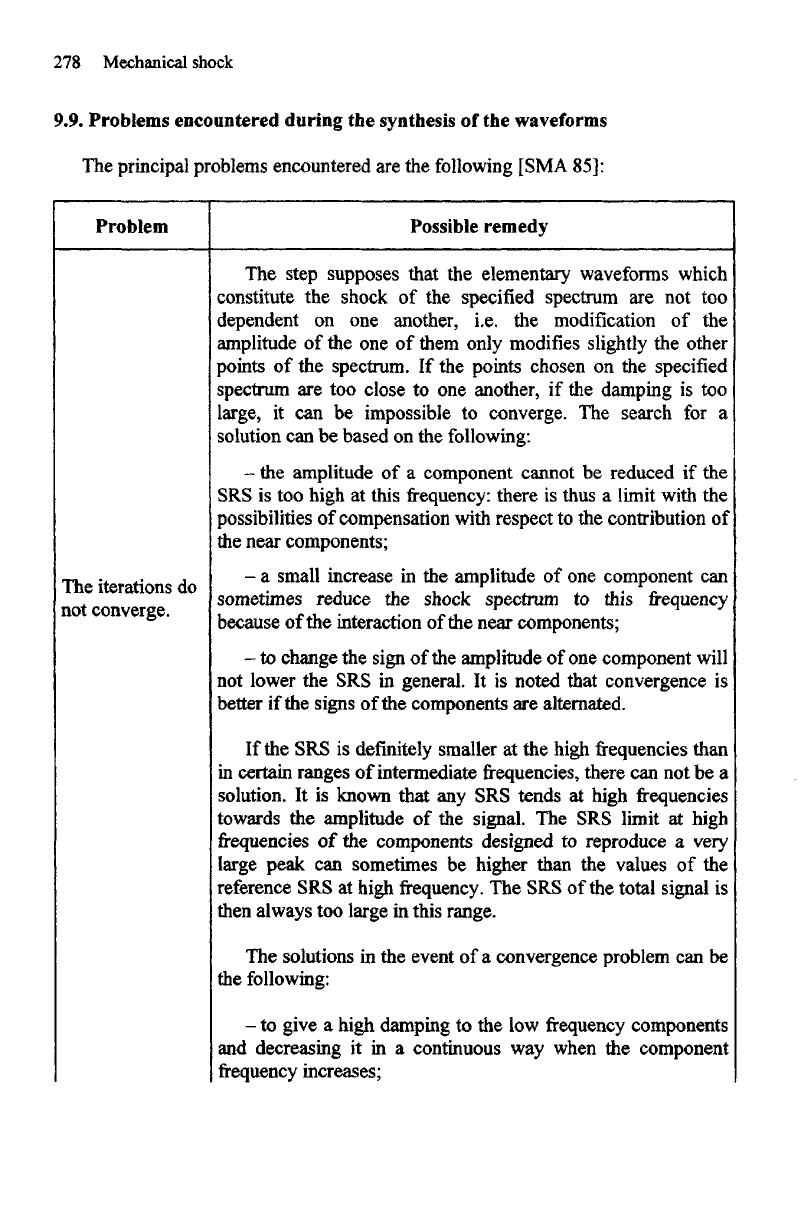
9.9. Problems encountered during
the
synthesis
of the
waveforms
The
principal problems encountered
are the
following [SMA 85]:
Problem
Possible
remedy
The
iterations
do
not
converge.
The
step supposes that
the
elementary waveforms
which
constitute
the
shock
of the
specified spectrum
are not too
dependent
on one
another, i.e.
the
modification
of the
amplitude
of the one of
them only modifies slightly
the
other
points
of the
spectrum.
If the
points chosen
on the
specified
spectrum
are too
close
to one
another,
if the
damping
is too
large,
it can be
impossible
to
converge.
The
search
for a
solution
can be
based
on the
following:
- the
amplitude
of a
component cannot
be
reduced
if the
SRS
is too
high
at
this frequency: there
is
thus
a
limit with
the
possibilities
of
compensation with
respect
to the
contribution
of
the
near components;
- a
small increase
in the
amplitude
of one
component
can
sometimes
reduce
the
shock spectrum
to
this
frequency
because
of the
interaction
of the
near components;
- to
change
the
sign
of the
amplitude
of
one
component
will
not
lower
the SRS in
general.
It is
noted that convergence
is
better
if the
signs
of the
components
are
alternated.
If
the SRS is
definitely smaller
at the
high
frequencies
than
in
certain ranges
of
intermediate
frequencies,
there
can not be a
solution.
It is
known that
any SRS
tends
at
high
frequencies
towards
the
amplitude
of the
signal.
The SRS
limit
at
high
frequencies
of
the
components
designed
to
reproduce
a
very
large peak
can
sometimes
be
higher than
the
values
of the
reference
SRS at
high
frequency. The SRS of the
total signal
is
then
always
too
large
in
this range.
The
solutions
in the
event
of a
convergence problem
can be
the
following:
- to
give
a
high damping
to the low
frequency
components
and
decreasing
it in a
continuous
way
when
the
component
frequency increases;

Control
of a
shaker using
a
shock response spectrum
279
The
iterations
do
not
converge
(continuation).
- to
change
the
frequency
of
the
components;
- to
lower damping (each component);
- to
reduce
the
number
of
component;
- to
change
the
sign
of
certain components.
The
spectrum
is
well
simulated
at
the frequencies
chosen,
but is too
small
between
these
frequencies.
This problem
can be
corrected
by:
-
increasing
the
number
of
components,
while
placing
the
new
ones
close
to the
'valleys'
of the
spectrum;
-
increasing
the
damping
of
the
components;
-
changing
the
sign
of the
components;
it
should, however,
be
known that
the
components
interact
in an
unforeseeable
way
when
the
sign
of the one of the two
near components
is
changed.
The
spectrum
is
well
simulated
at
the frequencies
chosen,
but is too
large between
certain
frequencies.
One can try to
correct
this defect:
-
by
removing
a
component;
- by
reducing
the
damping
of
the
near components;
- by
changing
the
sign
of
one
of
the
near components.
The
resulting
x(t) signal
is not
realizable (going
beyond
the
limiting
performances
of
the
shaker).
If
acceleration
is too
high,
one
can:
-
lower
the
damping
to
increase
the
ratio peak
of the
spectrum/amplitude
of the
signal;
-
increase
the
delays between
the
components;
-
change
the
sign
of
certain
components;
-use another
form
of
elementary waveform
at
each
frequency;
- as a
last resort, reduce
the frequency
range
on
which
the
specification
is
defined.
280
Mechanical
shock
The
resulting
x(t) signal
is not
realizable (going
beyond
of the
limiting
performances
of
the
shaker).
If
the
velocity
is too
large:
- The low
frequency
components
are
usually
at the
origin
of
this problem
and a
compromise must
be
found
at
these
frequencies,
which
can
result
in
removing
the
first
points
of the
reference
spectrum (these components produce
a
large
displacement
also).
It is
also
a
means
of
reducing
the
duration
of
the
signal when
the
specification imposes
one
duration
maximum.
This
modification
can be
justified
by
showing that
the
test item does
not
have
any
resonance
frequency in
this
domain.
-If
possible,
one can try to
change
the
elementary
waveform,
the
displacement
and the
velocity associated with
the
new
waveform being
different.
The
ZERD waveform
often
gives
better
results.
- If no
compromise
is
satisfactory,
it is
necessary
to
change
the
shock test
facility,
with
no
certainty
of
obtaining better
results.
9.10. Criticism
of
control
by a
shock response spectrum
Whatever
the
method
adopted,
simulation
on a
shock
test
facility
measured
in the
field
requires
the
calculation
of
their response
spectra
and the
search
for an
equivalent shock.
If
the
specification must
be
presented
in the
form
of a
time-dependent shock
pulse,
the
test
requester must define
the
characteristics
of
shape, duration
and
amplitude
of the
signal, with
the
already quoted
difficulties.
If
the
specification
is
given
in the
form
of a
SRS,
the
operator inputs
in the
control system
the
given spectrum,
but the
shaker
is
always controlled
by a
signal
according
to the
time calculated
and
according
to
procedures
described
in the
preceding paragraphs.
It is
known that
the
transformation shock spectrum signal
has
an
infinite number
of
solutions,
and
that very
different
signals
can
have identical
response
spectra. This phenomenon
is
related
to the
loss
of
most
of the
information
initially contained
in the
signal x(t) during
the
calculation
of the
spectrum [MET
67].
It
was
also seen that
the
oscillatory shock pulses have
a
spectrum
which
presents
an
important peak
to the frequency of the
signal. This peak can, according
to
choice
of
parameters, exceed
by a
factor
of 5 the
amplitude
of the
same spectrum
at the

Control
of a
shaker using
a
shock response spectrum
281
high
frequencies,
i.e.
five
times
the
amplitude
of the
signal itself. Being given
a
point
of the
specified spectrum
of
amplitude
S, it is
thus enough
to
have
a
signal
versus
time
of
amplitude
S / 5 to
reproduce
the
point.
For
a
simple
shaped
shock,
this factor does
not
exceed
2 in the
most extreme
case.
All
these remarks show that
the
determination
of a
signal
of the
same spectrum
can
lead
to
very diverse solutions,
the
validity
of
which
one can
question.
This experiment makes
it
possible
to
note that,
if any
particular precaution
is not
taken,
the
signals created
by
these methods have
in a
general
way one
duration much
larger
and an
amplitude much smaller than
the
shocks which were used
to
calculate
the
reference
SRS
(factor
of
about
10 in
both cases).
We
saw in
Chapter
4
that
one can use a
slowly swept sine
to
which
the
response
spectrum
is
close
to the
specified shock spectrum [CUR 55], [DEC 76], [HOW 68].
In
the
face
of
such differences between
the
excitations,
one can
legitimately
wonder whether
the SRS is a
sufficient
condition
to
guarantee
a
representative
test.
It
is
necessary
to
remember that this equivalence
is
based
on the
behaviour
of a
linear system which
one
chooses
a
priori
the Q
factor.
One
must
be
aware that:
- The
behaviour
of the
structure
is in
practice
far from
linear
and
that
the
equivalence
of the
spectra does
not
lead
to
stresses
of the
same amplitude. Another
effect
of
these non-linearities appears sometimes
by the
inaptitude
of the
system
to
correct
the
drive waveform
to
take account
of the
transfer
function
of the
installation.
Figure
9.33.
Example
of
shocks having spectra near
the SRS
281
282
Mechanical shock
-
Even
if the
amplitudes
of the
peaks
of
acceleration
and the
maximum stresses
of
the
resonant parts
of the
tested
structure
are
identical,
the
damage
by
thefatigue
generated
by
accumulation
of the
stress
cycles
is
rather
different
when
the
number
of
shocks
to be
applied
is
significant.
- The
tests
carried
out by
various laboratories
do not
have thesame
severity.
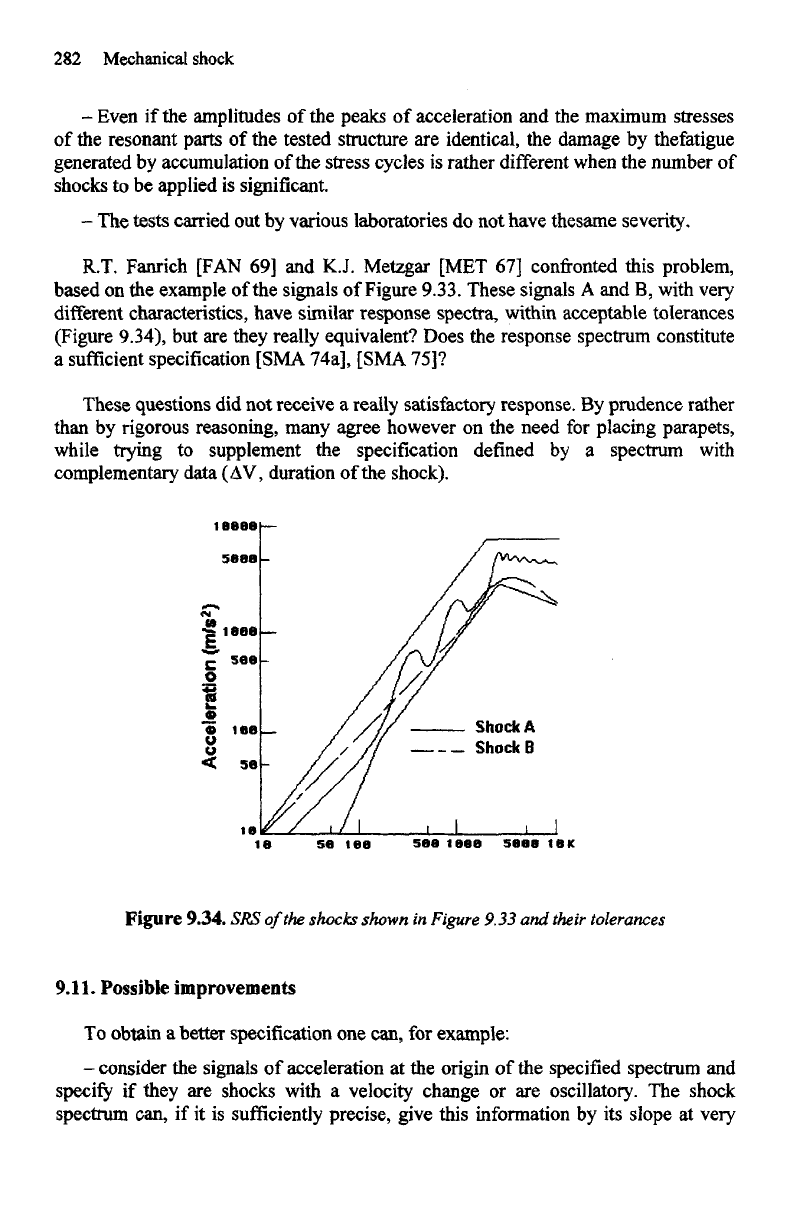
R.T. Fanrich [FAN
69] and
K.J. Metzgar [MET
67]
confronted this problem,
based
on the
example
of the
signals
of
Figure 9.33. These signals
A and B,
with very
different
characteristics,
have similar
response
spectra,
within
acceptable
tolerances
(Figure
9.34),
but are
they really equivalent? Does
the
response spectrum constitute
a
sufficient
specification [SMA 74a], [SMA 75]?
These
questions
did not
receive
a
really satisfactory response.
By
prudence rather
than
by rigorous
reasoning, many agree however
on the
need
for
placing parapets,
while
trying
to
supplement
the
specification defined
by a
spectrum with
complementary data (AV, duration
of the
shock).
Figure
9.34.
SRS
of
the
shocks shown
in
Figure 9.33
and
their tolerances
9.11. Possible improvements
To
obtain
a
better
specification
one
can,
for
example:
-consider
the
signals
of
acceleration
at the
origin
of the
specified spectrum
and
specify
if
they
are
shocks with
a
velocity change
or are
oscillatory.
The
shock
spectrum can,
if it is
sufficiently
precise,
give this information
by its
slope
at
very
.
Control
of a
shaker using
a
shock
response
spectrum
283
low
frequencies. The
choice
of the
type
of
simulation should
be
based
on
this
information;
-specify
in
addition
to the
spectrum other complementary data such
as the
duration
of the
signal time
or the
number
of
cycles (less easy)
or one of the
pre-set
parameters
in the
following
paragraphs,
in
order
to
deal
with
the
spectrum
and the
couple amplitude/duration
of the
signal
at the
same time.
9.11.1.
IES
proposal
To
solve this problem,
a
commission
of the IES
(Institute
of
Environmental
Sciences) proposed
in
1973
four
solutions consisting
of
specifying
additional
parameters [FAV 74], [SMA 74a], [SMA 75], [SMA
85] as
follows:
1.
Limit
the
transient duration
This
is a
question
of
imposing minimum
and
maximum limits over
the
duration
of
the
shock
by
considering that
if the
shock response spectrum
is
respected
and if
the
duration
is
comparable,
the
damage
should
be
roughly
the
same [FAN 69].
For
complex shapes,
one
should
pay
much attention
to how the
duration
is
defined.
2.
Require
SRS at two
different
values
of
damping
Damping
is in
general poorly known
and has
values
different
at
each natural
frequency
of the
structure.
It can be
supposed that
if the SRS is
respected
for two
different
values
of
damping,
for
example
E = 0.1 (Q = 5) and £ =
0.02
(Q =
25),
the
corresponding shock should
be a
reasonable simulation
for any
value
of £.
This
approach also results
in
limiting
the
duration
of the
acceptable shocks.
It is not
certain
in
particular that
a
solution always
exists,
when
the
reference spectra come
from
smoothed spectra
or an
envelope
of
spectra
of
several
different
events. This
approach intuitively remains attractive however;
it is not
much used except
in the
case
of
fast sweep sines.
It
deserves some atention being paid
to it to
evaluate
its
consequences over
the
duration
of the
drive waveform thus defined with shapes such
as
WAVSIN, SHOC,
and a
decaying sinusoid.
3.
Specification
of the
allowable ratios between
the
peak
of the SRS of
each
elementary
waveform
and the
amplitude
of
the
corresponding
signal versus time
The
goal
is
here
to
prevent
or
encourage
the use of an
oscillatory type shock
or a
simple
shape shock (with velocity change).
It
should, however,
be
recalled that
if the
shock
spectrum
is
plotted
at a
sufficiently high
frequency, the
value
of the
spectrum
reflects
the
amplitude
of the
shock
in the
time domain. This specification
is
thus
redundant.
It is,
however, interesting,
for it can be
effective over
the
duration
of the