Lalanne C. Mechanical Vibrations and Shocks: Mechanical Shock Volume II
Подождите немного. Документ загружается.

234
Mechanical
shock
frequencies can be
dominating. This
process
can
thus lead
to
important under-
testing;
-by
covering
only
the low frequencies, one can
define
an
'equivalent'
shock
of
sufficiently
low
amplitude
to be
realizable
on the
drop
testers.
However, nothing
is
solved
from the
point
of
view
of
shock duration.
The
limitation
of 2ms on the
crusher programmers
or 4ms
approximately
on the
pneumatic programmers will
not
make
it
possible
to
carry
out a
sufficiently
short
shock.
Its
spectrum
will
in
general envelop much
too
much
of the
pyrotechnical
shock
at low frequencies
(Figure 8.7). Except
for the
intersection point
of the
spectra
(f =
f
a
), simulation
will
then
be
incorrect over
all the frequency
band. Over-testing
issometimes acceptable
for f < f
a
, and
under-test beyond.
We
tried
to
show
in
this chapter
how
mechanical shocks could
be
simulated
on
materials
in the
laboratory.
The
facilities
described
are the
most current,
but the
list
is
far from
being exhaustive. Many other
processes
were
or are
still used
to
satisfy
particular
needs [CON 76], [NEL 74], [POW
74] and
[POW 76].
Chapter
9
Control
of a
shaker
using
a
shock response
spectrum
9.1. Principle
of
control
by a
shock response spectrum
9.1.1.
Problems
The
response spectra
of
shocks measured
in the
real environment
often
have
a
complicated shape which
is
impossible
to
envelop
by the
spectrum
of a
shock
of
simple shape realizable with
the
usual test facilities
of the
drop table type. This
problem arises
in
particular when
the
spectrum presents
an
important peak [SMA
73].
The
spectrum
of a
shock
of
simple shape
will
be:
-
either
an
envelope
of the
peak, which
will
lead
to
significant over-testing
compared with
the
other Frequencies;
- or
envelope
of
the
spectrum except
the
peak with, consequently, under-testing
at
the frequencies
close
to the
peak.
The
simulation
of
shocks
of
pyrotechnic origin leads
to
this kind
of
situation.
Shock
pulses
of
simple shape (half-sine, terminal peak
saw
tooth) have,
in
logarithmic scales,
a
slope
of 6
dB/octave (i.e. 45°)
at low frequencies
incompatible
with
those larger ones,
of
spectra
of
pyrotechnic shocks
(> 9
dB/octave). When
the
levels
of
acceleration
do not
exceed
the
possibilities
of the
shakers, simulation with
control
using spectra
are of
interest.

236
Mechanical shock
Figure
9.1.
Examples
of
SRS
which
are
difficult
to
envelop
with
the SRS
of
a
simple
shock
The
exciters
are
actually always controlled
by a
signal which
is a
function
of
time.
The
calculation
of a
shock spectrum
is an
unambiguous operation. There
is an
infinity
of
acceleration-time signals with
a
given spectrum.
The
general principle
thus
consists
in
searching
out one of the
signals x(t) having
the
specified spectrum.
Historically,
the
simulation
of
shocks with spectrum control
was
first
carried
out
using
analogue
and
then digital methods [SMA 74a] [SMA 75].
9.1.2. Method
of
parallel
filters
The
analogue method, suggested
in
1964
by
G.W. Painter
and
H.J. Parry ([PAI
64], [ROB 67], [SMA 74a], [SMA
75] and
[VAN 72]) consists
of
using
the
responses
of a
series
of
filters
placed simultaneously
at the
output
of a
generator
of
(rectangular) impulses.
The
filters, distributed into
the
third
octave,
are
selected
to
cover
the
range
of frequency of
interest.
Each
filter
output
is a
response
impulse.
If
the
filters are of
narrow bands, each
response
resembles
a
narrow band signal which
becomes
established
and
then attenuates.
If the
filters
are
equivalent
to
one-degree-
of-freedom
systems,
the
response
is of the
decaying sinusoidal type
and the
reconstituted
signal
is
oscillatory [USH 72]. Each
filter
is
followed
by an
amplifier
allowing regulation
of the
intensity
of the
response.
All
the
responses
are
then added together
and
sent
to the
input
of the
amplifier
which
controls
the
shaker.
One
approaches
the
spectrum specified
by
modifying
the
gain
of the
amplifiers
at the
output
of
each
filter.
It is
admitted that
the
output
of a
given
filter
affects only
the
point
of the
shock spectrum whose
frequency is
equal
to
the
central
frequency of the filter and to
which
the
shock spectrum
is
insensitive
with
the
dephasing caused
by the filters or the
shaker.
The
complete signal

Control
of a
shaker using
a
shock response spectrum
237
corresponding
to a flat
spectrum resembles
a
swept sine
of
initial
frequency
equal
to
the
central
frequency of the
highest filter, whose
frequency
decrease logarithmically
to the
central
frequency of the
lower
filter
[BAR 74], [HUG]
and
[MET 67].
The
disadvantage
of
this process
is
that
one
does
not
have practically
any
check
on
the
characteristics
of the
total control signal (shape, amplitude
and
duration).
According
to the
velocity
of
convergence towards
the
specified spectrum,
the
adjustment
of the
overall signals
can be in
addition
be
extensive
and
result
in
applying several shocks
to the
test
item
to
develop
the
control signal [MET 67].
This method
also
was
used
digitally
[SMA 75],
the
essential
difference
being
a
greater number
of
possible shapes
of
shocks. Thereafter,
one
benefited
from the
development
of
data processing tools
to
make numerical control systems which
are
easier
to use and use
elementary signals
of
various shapes (according
to the
manufacturer)
to
constitute
the
control signal [BAR 74].
9.1.3. Current numerical methods
From
the
data
of
selected points
on the
shock spectrum
to be
simulated,
the
calculator
of the
control system uses
an
acceleration signal
with
a
very
tight
spectrum.
For
that,
the
calculation
software
proceeds
as
follows:
- At
each
frequency f
0
of the
reference shock spectrum,
the
software
generates
an
elementary acceleration signal,
for
example
a
decaying sinusoid. Such
a
signal
has the
property
of
having
a
shock response spectrum presenting
a
peak
of the
frequency of the
sinusoid whose amplitude
is a
function
of the
damping
of the
sinusoid. With
an
identical shock spectrum, this property makes
it
possible
to
realize
on
the
shaker shocks which would
be
unrealizable with
a
control carried
out by a
temporal signal
of
simple shape (cf. Figure 9.2).
For
high
frequencies, the
spectrum
of the
sinusoid tends roughly towards
the
amplitude
of the
signal.
- All the
elementary signals
are
added
by
possibly introducing
a
given delay
(and
variable) between each
one of
them,
in
order
to
control
to a
certain extent
the
total duration
of the
shock (which
is
primarily
due to the
lower
frequency
components).
- The
total signal being thus made
up, the
software
proceeds
to
processes
correcting
the
amplitudes
of
each elementary signal
so
that
the
spectrum
of the
total
signal
converges towards
the
reference spectrum
after
some
interations.
238
Mechanical shock
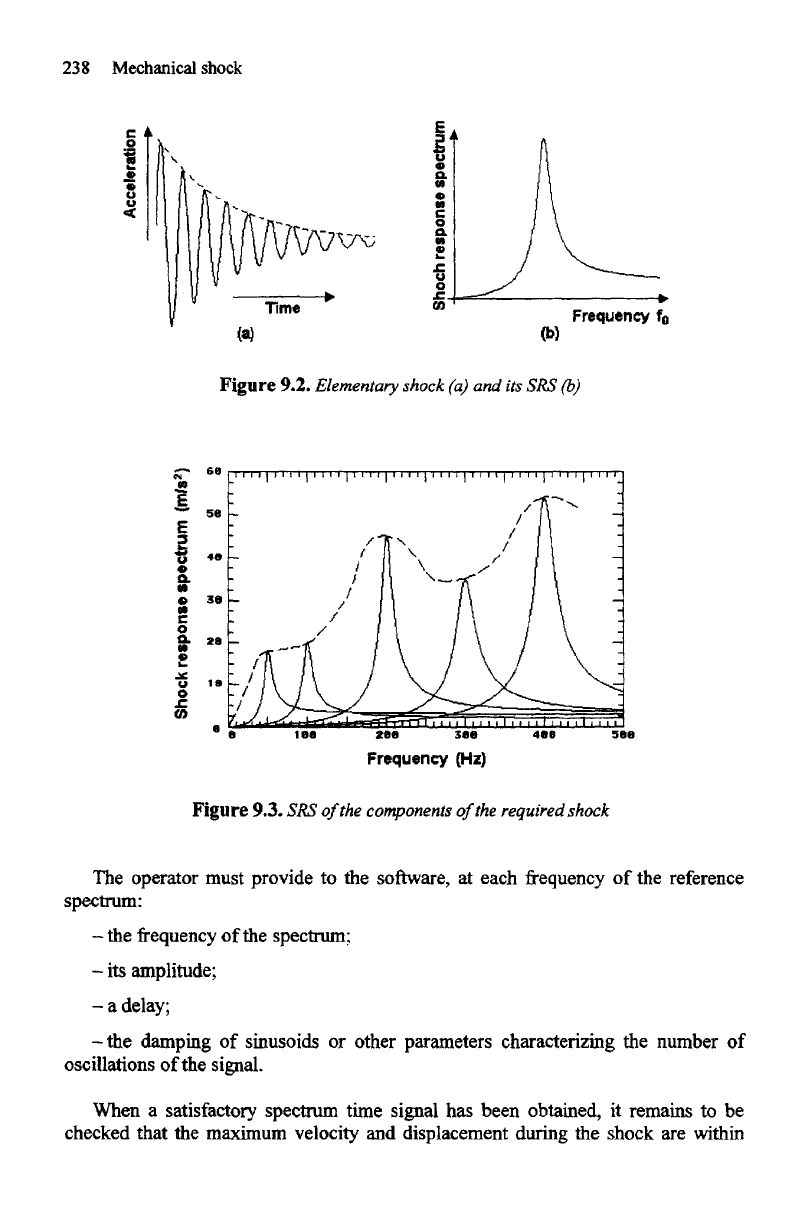
When
a
satisfactory spectrum time signal
has
been obtained,
it
remains
to be
checked that
the
maximum velocity
and
displacement during
the
shock
are
within
Figure
9.3.
SRS
of
the
components
of
the
required shock
The
operator
must
provide
to the
software,
at
each
frequency of the
reference
spectrum:
-the
frequency of the
spectrum;
-
its
amplitude;
- a
delay;
- the
damping
of
sinusoids
or
other parameters characterizing
the
number
of
oscillations
of the
signal.
Figure 9.2. Elementary shock (a) and its SRS (b)
Control
of a
shaker using
a
shock response spectrum
239
the
authorized limits
of the
test
facility
(by
integration
of the
acceleration signal).
Lastly,
after
measurement
of the
transfer
function
of the
facility,
one
calculates
the
electric excitation which will make
it
possible
to
reproduce
on the
table
the
acceleration pulse
with
the
desired spectrum
(as in the
case
of
control
from a
signal
according
to
time) [FAV 74].
We
propose
to
examine below
the
principal shapes
of
elementary signals used
or
usable.
9.2. Decaying sinusoid
9.2.1.
Definition
The
shocks measured
in the
field
environment
are
very
often
responses
of
structures
to an
excitation applied upstream
and are
thus composed
of a
damped sine
type
of the
superposition
of
several modal responses
of
[BOI 81], [CRI 78], [SMA
75] and
[SMA 85]. Electrodynamic shakers
are
completely adapted
to the
reproduction
of
this type
of
signals. According
to
this,
one
should
be
able
to
reconstitute
a
given
SRS from
such signals,
of the
form:
where:
O
=
2 n f
f
= frequency of the
sinusoid
n =
damping
factor
NOTE:
The
constant
A is not the
amplitude
of
the
sinusoid, which
is
actually
equal
to
[CAR
74], [NEL 74],
[SMA
73],
[SMA
74a],
[SMA
74b]
and
[SMA
75]:
9.2.2.
Response spectrum
This elementary signal a(t)
has a
shock
spectrum which
presents
a
more
or
less
significant
peak
to the frequency f
0
= f
according
to the
value
of n.
This peak
increases when
n
decreases.
It
can,
for
very weak
n
(about 10-3), reach
an
amplitude
240
Mechanical
shock
exceeding
by a
factor
10 the
amplitude
of
shock according
to
time [SMA 73].
It is an
interesting property, since
it
allows,
for
equal SRS, reduction
in the
amplitude
of the
acceleration signal
by an
important factor
and
thus
the
ability
to
carry
out
shocks
on
a
shaker which could
not be
carried
out
with simple
shapes.
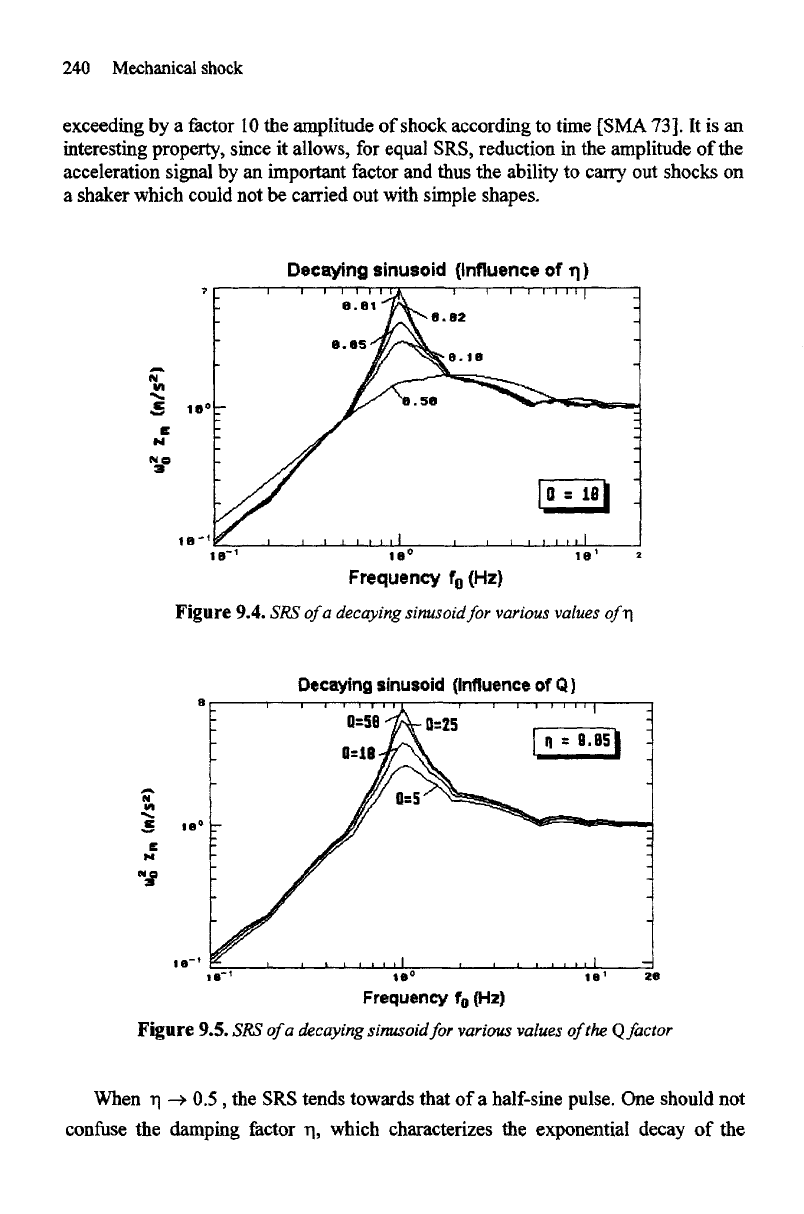
Figure
9.4.
SRS
of
a
decaying sinusoid
for
various values
of n
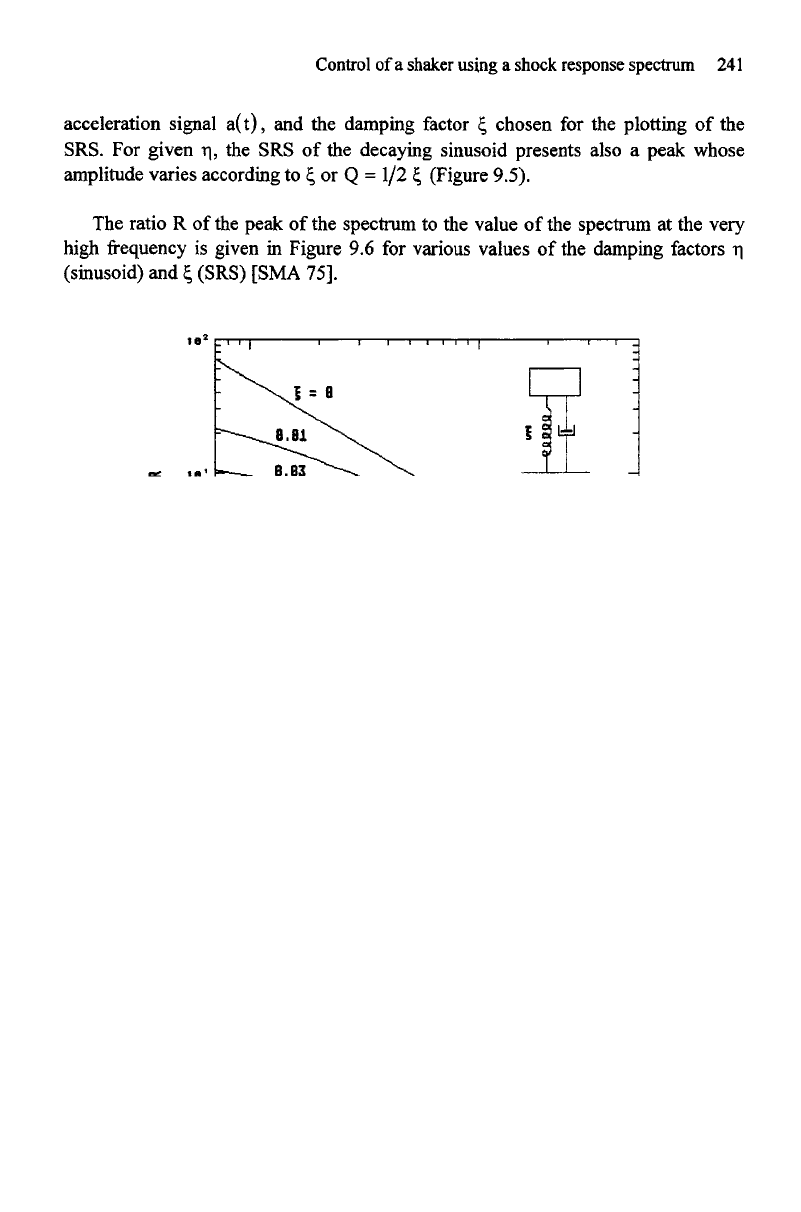
Figure
9.5.
SRS
of
a
decaying sinusoid
for
various values
of
the
Q
factor
When
n -
0.5,
the SRS
tends towards that
of a
half-sine pulse.
One
should
not
confuse
the
damping factor
n,
which characterizes
the
exponential decay
of the
Control
of a
shaker using
a
shock
response spectrum
241
acceleration
signal a(t),
and the
damping
factor
E
chosen
for the
plotting
of the
SRS.
For
given
n, the SRS of the
decaying sinusoid presents also
a
peak whose
amplitude
varies
according
to E or Q = 1/2 E
(Figure 9.5).
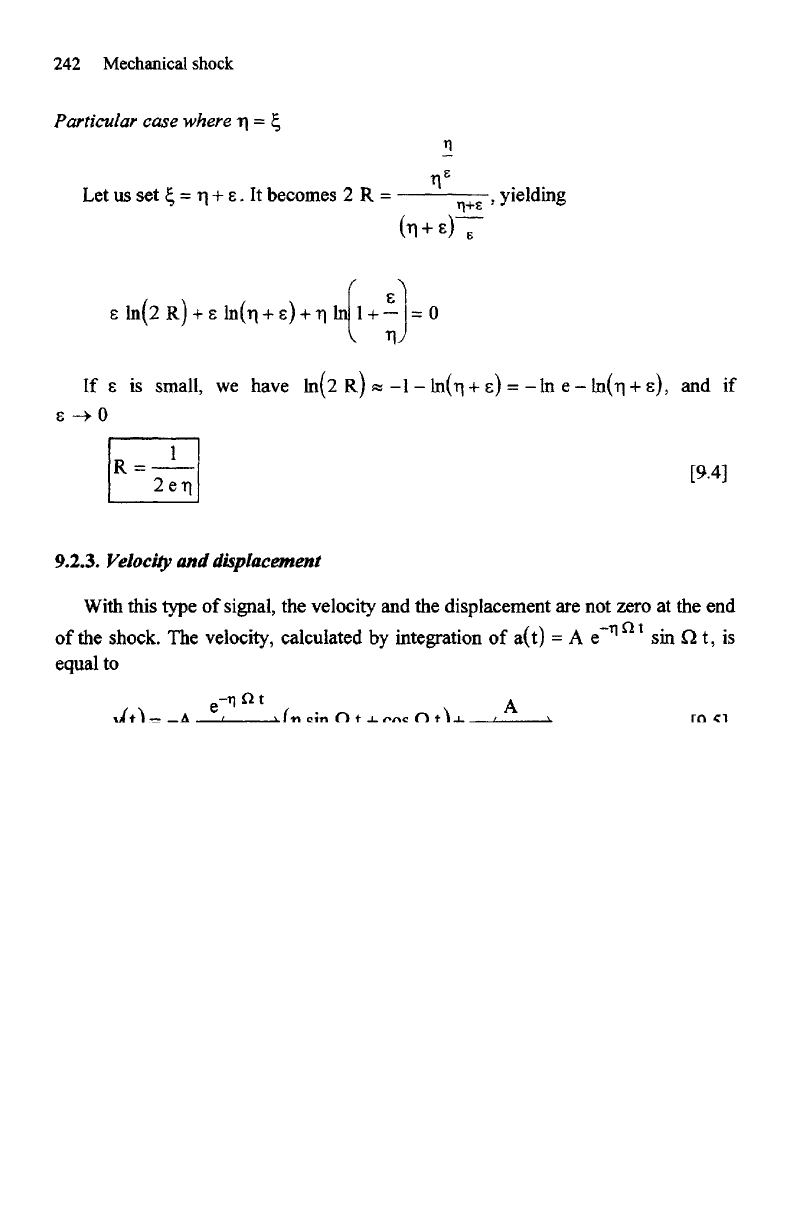
The
ratio
R of the
peak
of the
spectrum
to the
value
of the
spectrum
at the
very
high
frequency is
given
in
Figure
9.6 for
various values
of the
damping factors
n
(sinusoid)
and E
(SRS) [SMA 75].
Figure 9.6.
Amplitude
of
the
peak
of
the
SRS
of
a
decaying sinusoid versus
n and E
approximated using
the
relation [GAL
73]:
for
the value of this ration can be
242
Mechanical
shock
Particular
case
where
n = E
9.2.3.
Velocity
and
displacement
With
this type
of
signal,
the
velocity
and the
displacement
are not
zero
at the end
of
the
shock.
The
velocity, calculated
by
integration
of
a(t)
= A
e"
11
sin Q t, is
equal
to
If
t - o
The
displacement
is
given
by:
If
t - o, x (t) - o
(Figure
9.7).
Let
us set E = n + e. It
becomes
2
yielding
If
e is
small,
we
have
In
and if
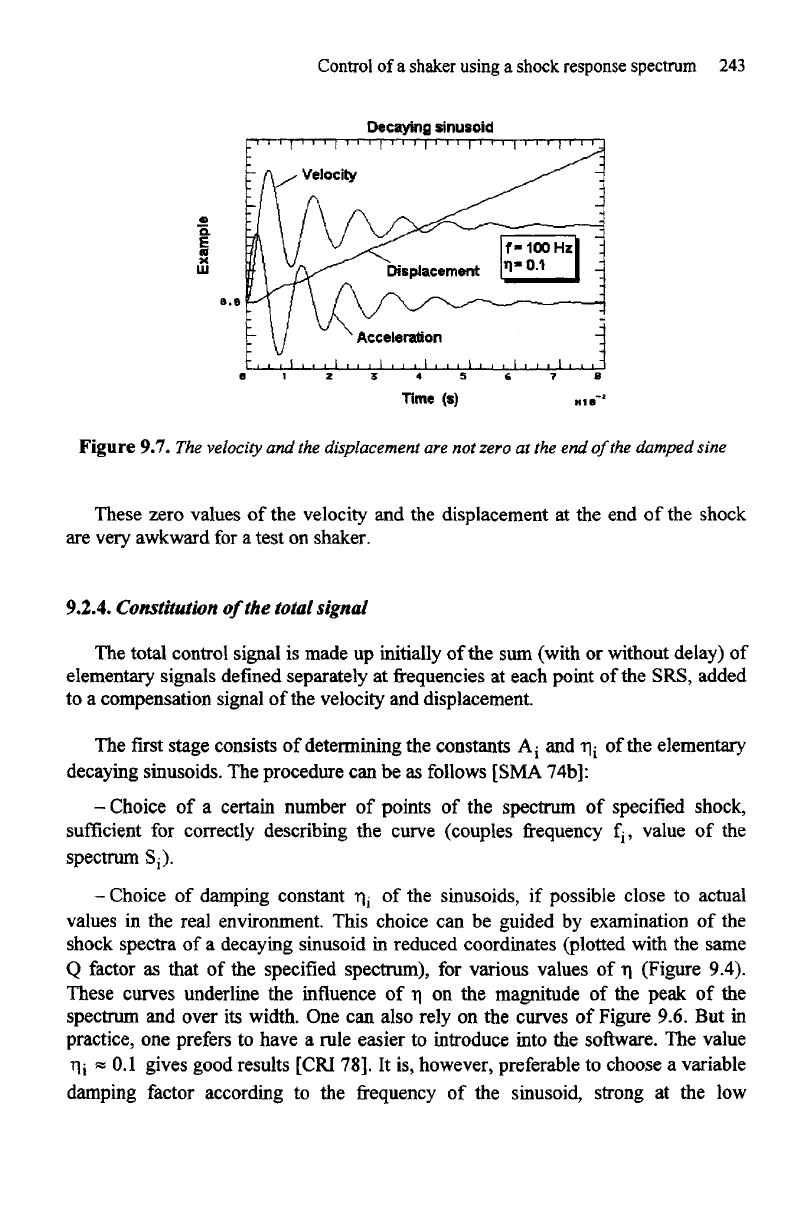
Figure 9.7.
The
velocity
and the
displacement
are not
zero
at the end
of
the
damped sine
These zero values
of the
velocity
and the
displacement
at the end of the
shock
are
very awkward
for a
test
on
shaker.
9.2.4. Constitution
of
the
total signal
The
total control signal
is
made
up
initially
of the sum
(with
or
without delay)
of
elementary signals defined separately
at frequencies at
each point
of the
SRS, added
to a
compensation signal
of the
velocity
and
displacement.
The first
stage consists
of
determining
the
constants
Ai and ni of the
elementary
decaying sinusoids.
The
procedure
can be as
follows [SMA 74b]:
-
Choice
of a
certain number
of
points
of the
spectrum
of
specified shock,
sufficient
for
correctly describing
the
curve (couples
frequency f
i,
value
of the
spectrum Si).
-
Choice
of
damping constant
ni of the
sinusoids,
if
possible close
to
actual
values
in the
real environment. This choice
can be
guided
by
examination
of the
shock spectra
of a
decaying sinusoid
in
reduced coordinates (plotted with
the
same
Q
factor
as
that
of the
specified spectrum),
for
various values
of n
(Figure 9.4).
These curves underline
the
influence
of n on the
magnitude
of the
peak
of the
spectrum
and
over
its
width.
One can
also rely
on the
curves
of
Figure 9.6.
But in
practice,
one
prefers
to
have
a
rule
easier
to
introduce into
the
software.
The
value
ni ~
0.1
gives good results [CRI 78].
It is,
however, preferable
to
choose
a
variable
damping
factor according
to the frequency of the
sinusoid, strong
at the low
Control of a shaker using a shock response spectrum 243