Кузьмин Д.В. Моделирование динамики мехатронных систем. Уравнения и алгоритмы
Подождите немного. Документ загружается.

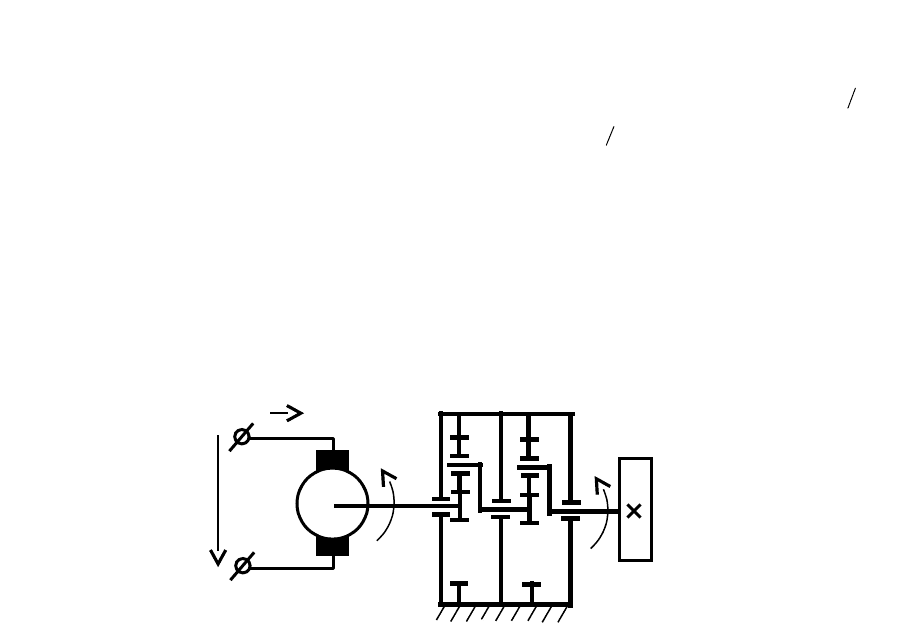
Получить уравнения динамики мехатронного модуля, состоящего из
электродвигателя МИГ370ДТ и двухступенчатого планетарного редуктора.
Схема модуля изображена на рис. 4.7. Параметры двигателя: номинальная
мощность – 370 Вт, номинальное напряжение питания – 27 В,
номинальный ток якоря – 17 А, номинальная частота вращения – 6000
об/мин, активное сопротивление якоря
ОмR 12.0
, индуктивность якоря
ГнL
5
104.2
, коэффициент двигателя
04.0K
, момент инерции ротора
25
1
108.4 мкгJ
. Параметры редуктора: передаточные отношения
ступеней
8
1
u
,
10
2
u
, коэффициент жесткости
радмНk
4
107
,
коэффициент потерь на деформацию
радсмНb 10
, люфты в ступенях
рад
4
105
, момент инерции водила и сателлитов первой ступени
относительно оси вращения водила
25
2
100.3 мкгJ
, момент инерции
второй ступени с учетом нагрузки
24
3
105.5 мкгJ
. Трение в
кинематических парах считать пренебрежимо малым.
Решение
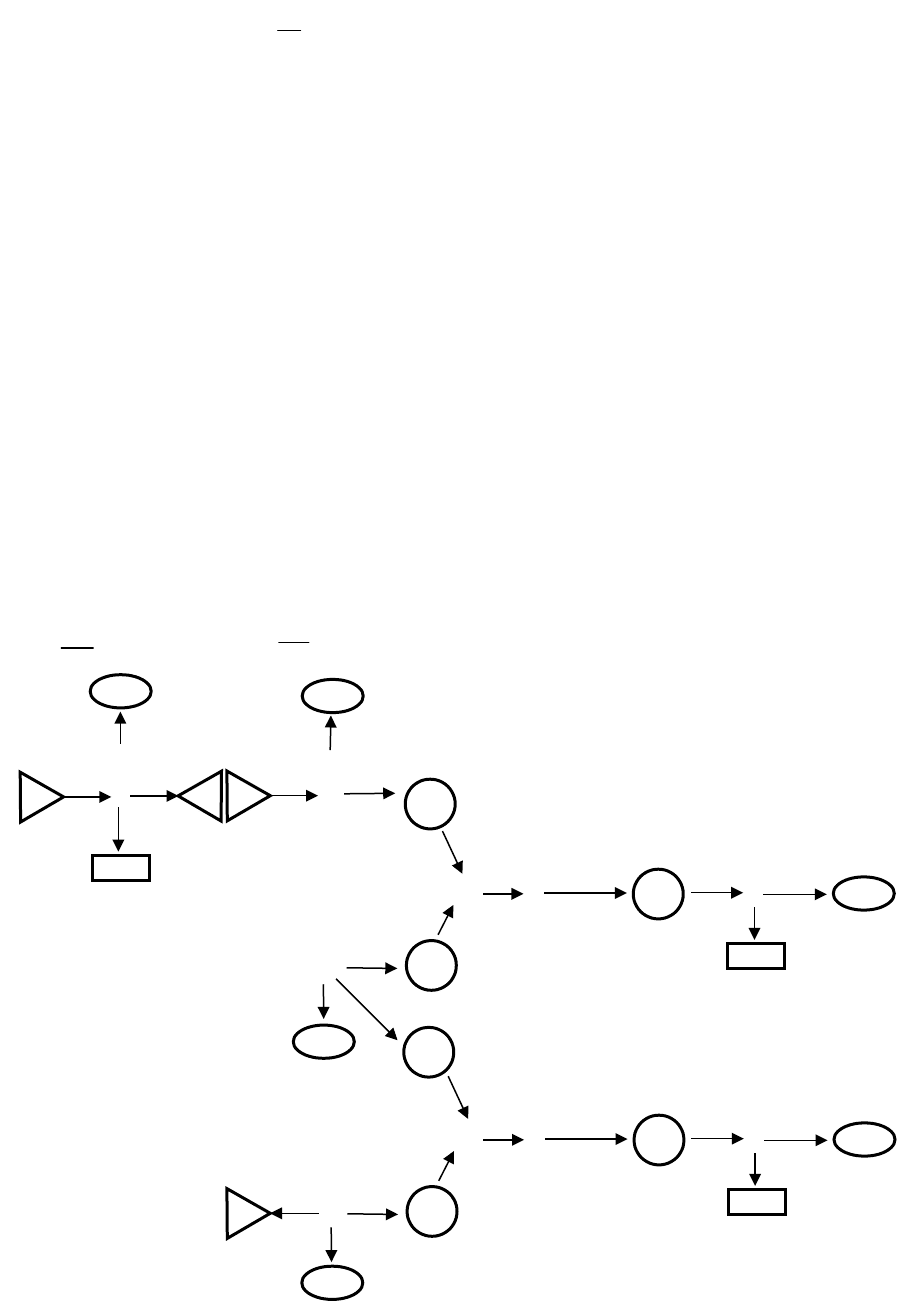
Расчетная схема модуля соответствует схеме, изображенной на рис.
34, число эквивалентных звеньев N=2. Связный граф динамики модуля
имеет вид (рис. 4.8). Применяя к узлам потоков графа закон (2.2) получим
уравнения динамики модуля:
91
Рис. 4.7
α
1
, M
1
i
U
α
3
, M
3
u
1
u
2
1
2
333222
222
1
222111
111
1
111
1
)(
)()(
)(
MJbkm
bkmuJbkm
bkmuJKi
KRi
dt
di
LU
(4.2)
где
1
1
)()(
iiii
utt
,
2,1i
.
Интегрирование уравнений (4.2) с учетом (4.1) методом Рунге-Кутты
четвертого порядка с шагом
ch
6
102.1
на интервале времени
ct 12.0,0
при значениях
ВU 27
,
мНM 50
3
и нулевых начальных
условиях, дает закон изменения тока якоря (рис. 4.9, а), законы изменения
углов поворота (рис. 4.9, б, в, г) и угловых скоростей (рис. 4.9, д, е, ж)
валов редуктора.
92
Ri
U
1
i
)(Li
dt
d
1
1
1
u
1
-1
-1
Σ
1
1
1
1
b
)(
11
J
dt
d
Рис. 4.8
m(θ
1
)
1
2
u
K
1
2
-1
Σ
1
2
b
m(θ
2
)
1
M
3
1
2
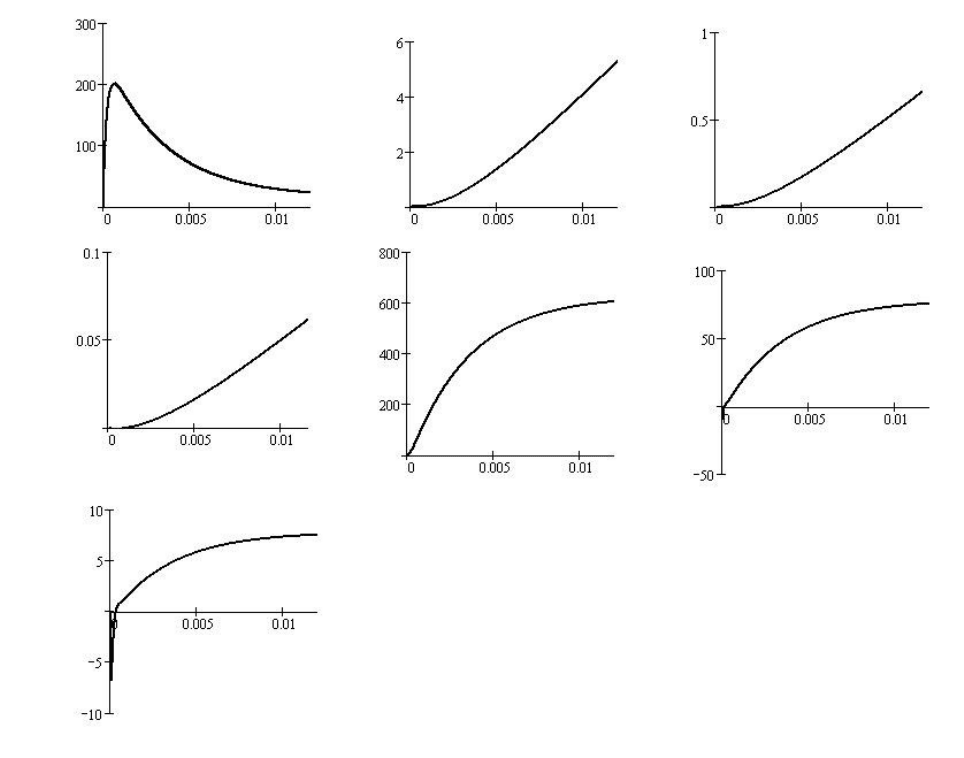
Результаты математического моделирования показывают
динамическое влияние люфтов в механической передаче: выходные валы
ступеней 1 и 2 начинают движение из состояния покоя в результате
упругих ударов, энергия которых частично поглощается звеньями
механизма. На практике, подобные динамические эффекты сводят к
минимуму, повышая точность изготовления звеньев или применяя
люфтовыбирающие устройства. Моделирование динамики с учетом
нелинейности типа «люфт» на ранних стадиях проектирования привода
позволит более обоснованно назначать класс точности звеньев и решать
вопрос о применении люфтовыбирающих устройств.
93
а)
б)
в)
г)
д)
е)
ж)
t, с
t, с
t, с
t, с
t, с
t, с
t, с
i, A
рад,
1
рад,
2
рад,
3
cрад /,
2
cрад /,
1
cрад /,
3
Рис. 4.9
1
2
4.3. Модель динамики гидропривода с гидроцилиндром
двухстороннего действия
Гидравлический (электрогидравлический) привод имеет широкое
применение в робототехнике, станкостроении и подъемно-транспортном
машиностроении благодаря своему основному достоинству – возможности
обеспечения значительных силовых воздействий при относительно
небольших габаритах и массе исполнительных элементов. По причине
малой сжимаемости жидкости, гидропривод отличает также малое время
реакции на задающее входное воздействие. У современных гидроприводов
это время может составлять примерно 0.005 с. Управление скоростью
движения выходного звена осуществляется путем изменения площади
проходных сечений в магистрали нагнетания рабочей жидкости
(дроссельное управление), а также за счет изменения рабочего объема
насоса или двигателя (объемное управление). Гидроприводы дроссельного
управления, в свою очередь, могут получать энергию от насосов
постоянной или переменной производительности. Гидропривод
дроссельного управления с насосом постоянной производительности
является наиболее распространенным, благодаря простой и относительно
дешевой конструкции, но его КПД довольно низкий. Применение насосов
переменной производительности позволяет повысить КПД гидропривода,
уменьшить необходимый объем рабочей жидкости и отказаться от
системы ее охлаждения, но себестоимость гидропривода в целом
увеличивается, так как насосы переменной производительности являются
существенно более дорогими. Механическая характеристика гидропривода
дроссельного управления является нелинейной, так как зависимость
разности давлений на входах и выходах дросселирующих клапанов от
объемного расхода рабочей жидкости – нелинейная. Гидропривод
объемного управления отличает высокий КПД, небольшие габаритные
размеры и масса, механическая характеристика, близкая к линейной.
Стоимость таких гидроприводов является высокой, так как в них
используются дорогостоящие плунжерные насосы переменной
производительности.
94
1
2
Роботы, станки с ЧПУ, современные подъемно-транспортные
машины с микропроцессорным управлением оснащаются следящим
гидроприводом. Подробные сведения о гидроприводах машин можно
найти в [40, 42].
Динамика гидропривода зависит от физических свойств рабочей
жидкости (жидкостно-газовой смеси): плотности, сжимаемости, вязкости,
теплоемкости и теплопроводности. Существенный вклад в динамику
гидропривода вносят особенности его механической части (трение и
зазоры в кинематических парах, упругая податливость звеньев). При
разработке математической модели динамики гидропривода в каждом
конкретном случае следует учитывать лишь наиболее значимые факторы,
так как учет всех действующих факторов нецелесообразен из-за
усложнения модели и отсутствия точных данных обо всех параметрах
системы. Автоматизация моделирования динамики гидропривода
основывается на том, что его типовым элементам можно поставить в
соответствие определенные математические модели, которые
представляются заранее известными участками связного графа.
Состояние элементов связного графа, описывающего динамику
гидравлической системы, характеризуется двумя параметрами: объемным
расходом
cмQ /,
3
(переменная типа «поток») и давлением
2
, мНp
(переменная типа «усилие»). Уравнения (2.3) – (2.5), описывающие
динамику процессов, протекающих в одновходовых элементах связного
графа гидравлической системы, имеют вид:
mQ
dt
d
p
- инерционный
накопитель энергии,
dtcQp
- емкостный накопитель энергии,
),( xQp
- элемент, рассеивающий энергию. В уравнениях обозначены:
4
, мкгm
- коэффициент массы;
5
, мНc
- коэффициент жесткости жидкости
в выделенном участке трубопровода. Коэффициенты
cm,
рассчитываются
по формулам [44]:
2
AVm
,
AlEc
, где
3
, мкг
- плотность,
3
, мV
-
объем,
2
, мНE
- модуль объемной упругости рабочей жидкости;
2
, мA
-
площадь поперечного сечения,
мl,
- длина выделенного участка
трубопровода. Функция
),( xQ
, описывающая потери давления на
местных управляемых гидравлических сопротивлениях, имеет вид [42]:
2
)(),( QxkxQ
, (4.3)
95
1
2
где
2
)(5.0)(
xAxk
,
8.06.0
- безразмерный коэффициент
расхода,
)(xA
- площадь поперечного сечения рабочего окна
золотникового распределителя, x, м – перемещение золотника. Потери
давления на участке трубопровода при ламинарном течении [44]:
QQ
Г
)(
, (4.4)
где
2
2 AV
Г
- коэффициент гидравлического сопротивления,
5
мсН
,
- коэффициент линеаризованного вязкого трения жидкости.
Идеальный гидроцилиндр математически описывается как
функциональный преобразователь (2.6):
QAv
1
,
21
ppAF
, где
смv,
- скорость перемещения поршня относительно цилиндра,
НF,
- усилие,
развиваемое гидроцилиндром,
21
, pp
- давления жидкости в полостях
цилиндра, A – площадь активной поверхности поршня. Аналогичными
уравнениями описывается идеальный гидромотор:
Qw
1
,
21
ppwM
,
где
срад,
- скорость вала,
мНM ,
- момент, развиваемый
гидромотором, w – активный объем гидромотора.
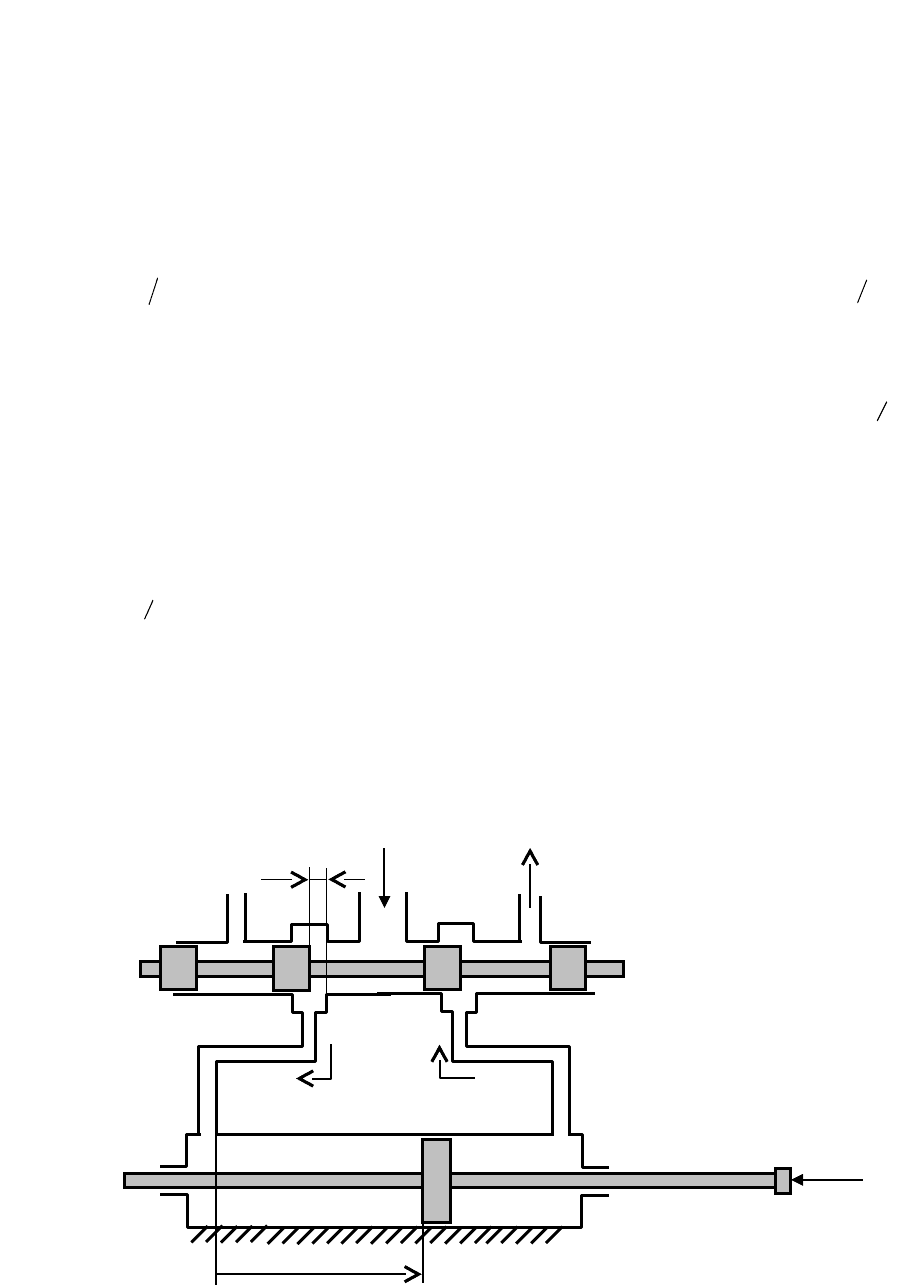
Рассмотрим силовую часть гидропривода, состоящую из
гидроцилиндра двухстороннего действия 1 и четырехщелевой
золотниковой пары 2 (рис. 4.10).
96
x
Рис. 4.10
p
Q
1
F
Q
2
1
2
Q
3
S
M
Будем полагать, что давление рабочей жидкости p, создаваемое насосом,
постоянное. На рис. 4.10 обозначены: x – перемещение золотника, Q
1
–
расход жидкости в магистрали нагнетания, Q
2
– расход жидкости в сечении
цилиндра у поверхности поршня, Q
3
– расход жидкости в магистрали
слива, S – перемещение штока, M – масса объекта управления,
приведенная к штоку гидроцилиндра, F – сила, действующая со стороны
конструкции, связывающей шток с объектом управления. Примем, что
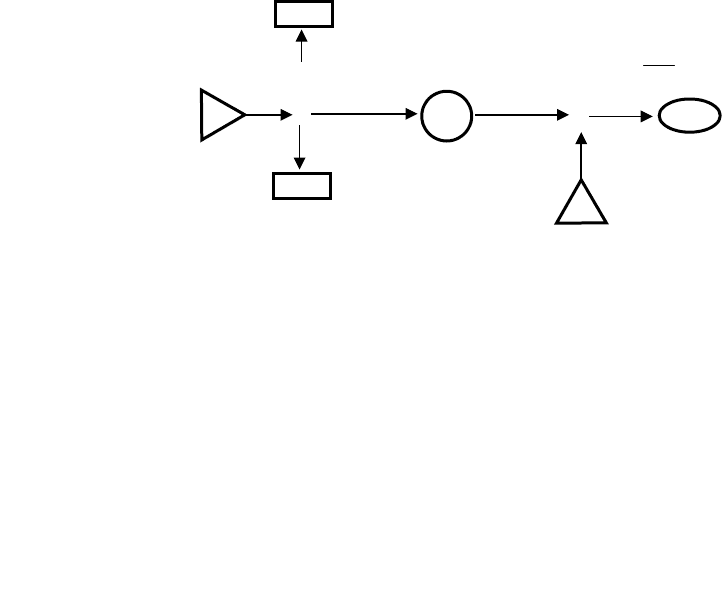
звенья гидроцилиндра и золотниковой пары абсолютно твердые. Связный
граф простейшей модели данного привода, не учитывающей инерционные,
упругие свойства рабочей жидкости и обладающей одной степенью
свободы, имеет вид (рис. 4.11).
На графе обозначены:
j
QQ
,
3,2,1j
- объемный расход, A – площадь
активной поверхности поршня. Уравнение динамики такой модели при
constM
:
)(),(2
1
FSMAxQp
, (4.5)
где
),( xQ
- гидравлическое сопротивление в золотниковой паре,
описываемое уравнением (4.3). Уравнение (4.5) используется в решении
задачи предварительного выбора элементов гидропривода и определения
97
Рис. 4.11
),( xQ
p
1
Q
),( xQ
S
1
)( SM
dt
d
1
A
F
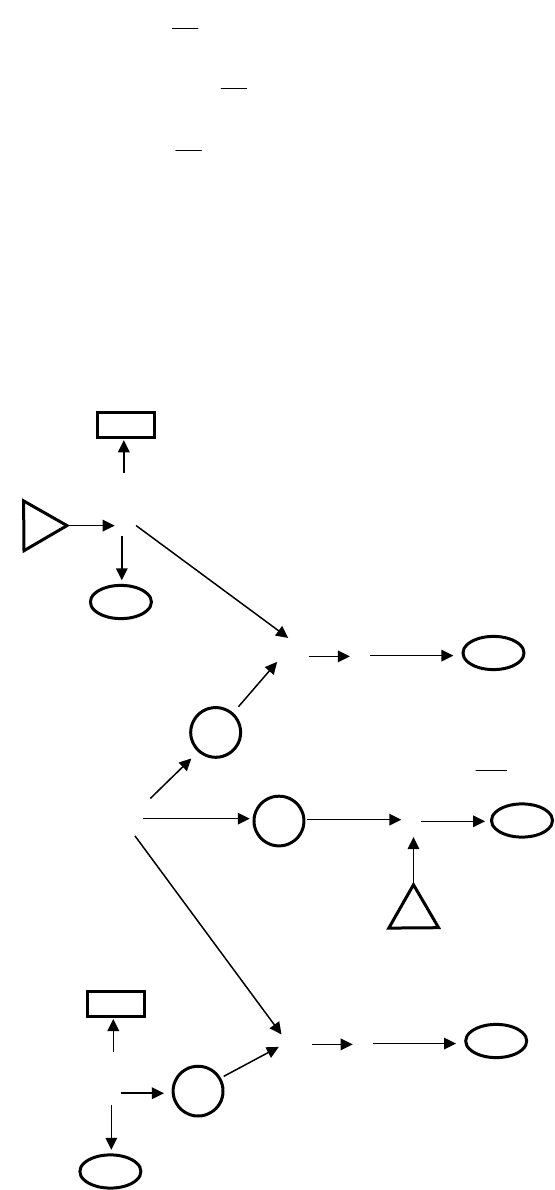
основных параметров гидросистемы. Модель динамики привода с учетом
упругих и инерционных свойств рабочей жидкости представлена связным
графом, изображенным на рис. 4.12. Уравнения динамики привода,
следующие из связного графа
).,()()(
,)()(
,)()(),(
333233
233
1
121
121111
xQQSm
dt
d
dtQSc
dtQScFSM
dt
d
AdtQSc
dtQScQSm
dt
d
xQp
(4.6)
В уравнениях (4.6) обозначены: m
1
(S), m
3
(S) – коэффициенты масс, c
1
(S),
c
3
(S) – коэффициенты жесткости рабочей жидкости в полостях
гидроцилиндра;
2112
QQQ
,
3223
QQQ
.
98
-1
Рис. 4.12
p
1
1
Q
),(
1
xQ
S
1
)( SM
dt
d
1
A
F
1
Σ
1
2
Q
1
Σ
-1
1
3
Q
),(
1
xQ

Интегрирование (4.5), (4.6) выполнено при следующих значениях
параметров: давление на входе, создаваемое насосом – 1МПа; площадь
активной поверхности поршня – 0.0201 м
2
, длина рабочего хода штока – 1
м, диаметр золотника – 0.02 м, положение золотника x = 0.002 м, золотник
цилиндрический, проточка в гильзе – кольцевая, коэффициент расхода –
0.7; плотность рабочей жидкости -
3
/900 мкг
, модуль упругости – 1750
МПа, масса объекта управления, приведенная к штоку гидроцилиндра -
6000 кг, усилие нагрузки – 15кН. Начальные условия: для (4.5)
мS 400.0)0(
,
0)0( S
; для (4.6) с учетом сжатия рабочей жидкости в
гидроцилиндре под действием нагрузки
мS 399.0)0(
,
0)0( S
,
0)0()0()0(
321
QQQ
. Уравнения проинтегрированы на интервале
времени
ct 5,0
, шаг интегрирования
ch
4
105
. Результат
интегрирования (4.5) приведен на рис. 4.13, уравнений (4.6) – на рис. 4.14.
99
t, c
t, c
S, м
смS /,
Рис. 4.13
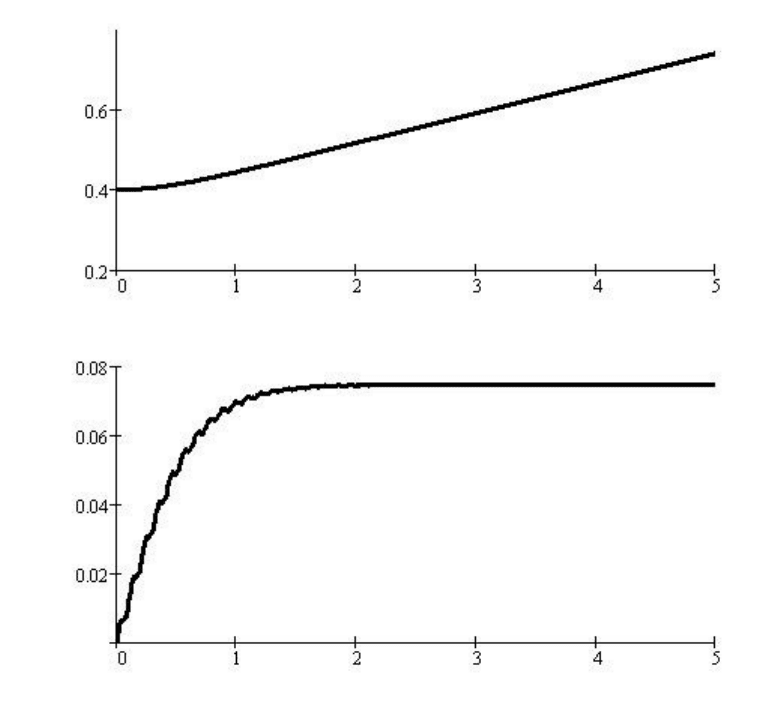
Полученные графики показывают, что при больших силовых и
инерционных нагрузках влияние упругих свойств рабочей жидкости на
динамику движения штока гидроцилиндра является существенным.
Рассмотренная модель динамики исполнительной части гидропривода, при
необходимости, может быть дополнена диссипативными элементами,
учитывающими протечки рабочей жидкости и наличие сухого трения в
кинематических парах.
ЗАКЛЮЧЕНИЕ
Рассмотрены вопросы математического моделирования и
автоматизации процессов формирования моделей динамики мехатронных
100
t, c
t, c
S, м
смS /,
Рис. 4.14