Кузьмин Д.В. Моделирование динамики мехатронных систем. Уравнения и алгоритмы
Подождите немного. Документ загружается.


особенно при решении задач управления, может быть выбор в пользу
управляемых координат. Выбор обобщенных координат при исследовании
механизмов с замкнутыми контурами осуществляется непосредственно
специалистом-разработчиком.
Задача определения уравнений связей в механической системе,
имеющей замкнутые контуры, до сих пор не имеет универсального
решения. Данное состояние вопроса обусловлено тем, что функции
положения механизмов с замкнутыми контурами, вообще говоря,
достаточно сложно выразить аналитически. Кроме этого, функции
положения замкнутых механизмов зависят от конкретной сборки этих
механизмов. Однако на практике, как правило, в качестве замкнутых
контуров используются хорошо известные механизмы (коромыслово-
ползунный, четырехшарнирный, кулисный, с качающимся цилиндром и
т.п.), синтез которых ведется по допускаемому значению угла давления.
Данное ограничение, вместе с ограничениями хода управляемого звена, не
допускают самопроизвольный переход замкнутого контура в другую
сборку, что позволяет использовать только те уравнения связей, которые
соответствуют имеющей место сборке. Для плоских четырехзвенных
механизмов эти уравнения можно найти в [7].
Рассмотрим голономную механическую систему с числом степеней
свободы m, имеющую структуру типа «дерево». Уравнения динамики
(3.12) такой системы можно записать в виде:
0
jj
P
,
mj ,,2,1
, (3.29)
где
n
i
iijiiijj
Krm
1
,
n
i
iijiijjj
MFtQP
1
)(
- приведенные силы
инерции и обобщенные силы соответственно. Предположим, что при
замыкании ветвей в контуры независимыми остаются первые s
обобщенных координат разомкнутой системы
s
qqq ,,,
21
,
ms
, а
остальные подчиняются уравнениям связей
),,,(
21 s
qqqfq
,
mss ,,2,1
. (3.30)
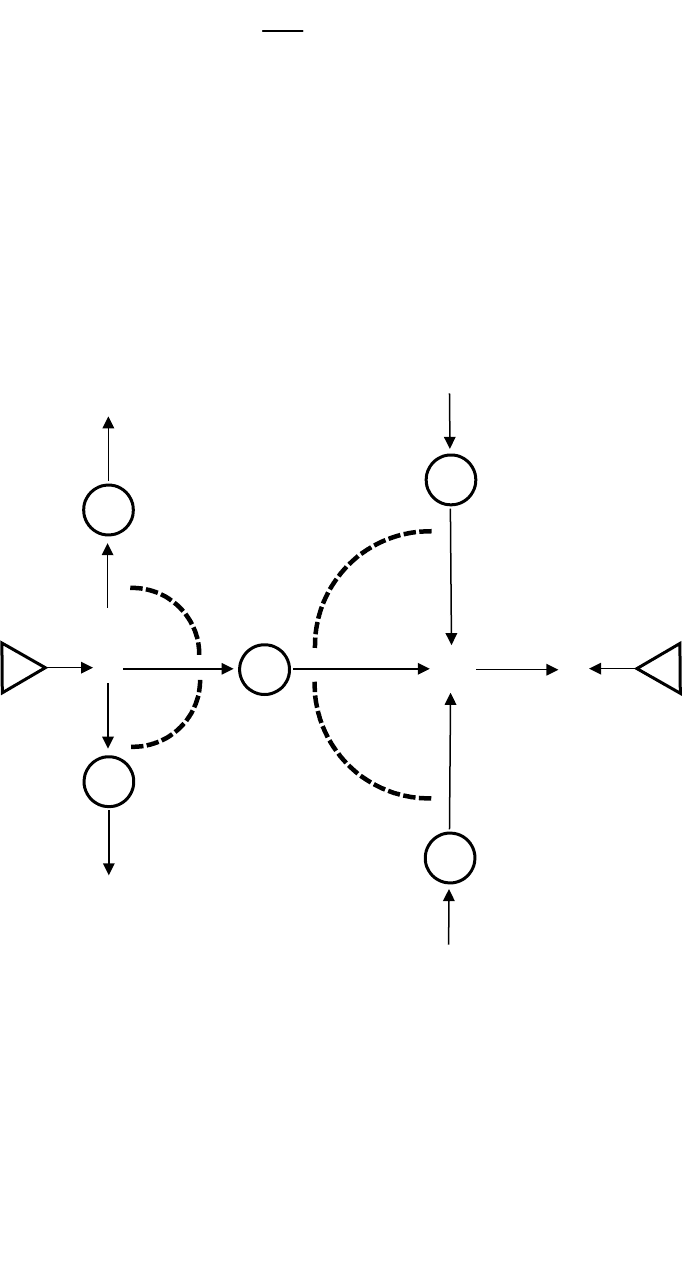
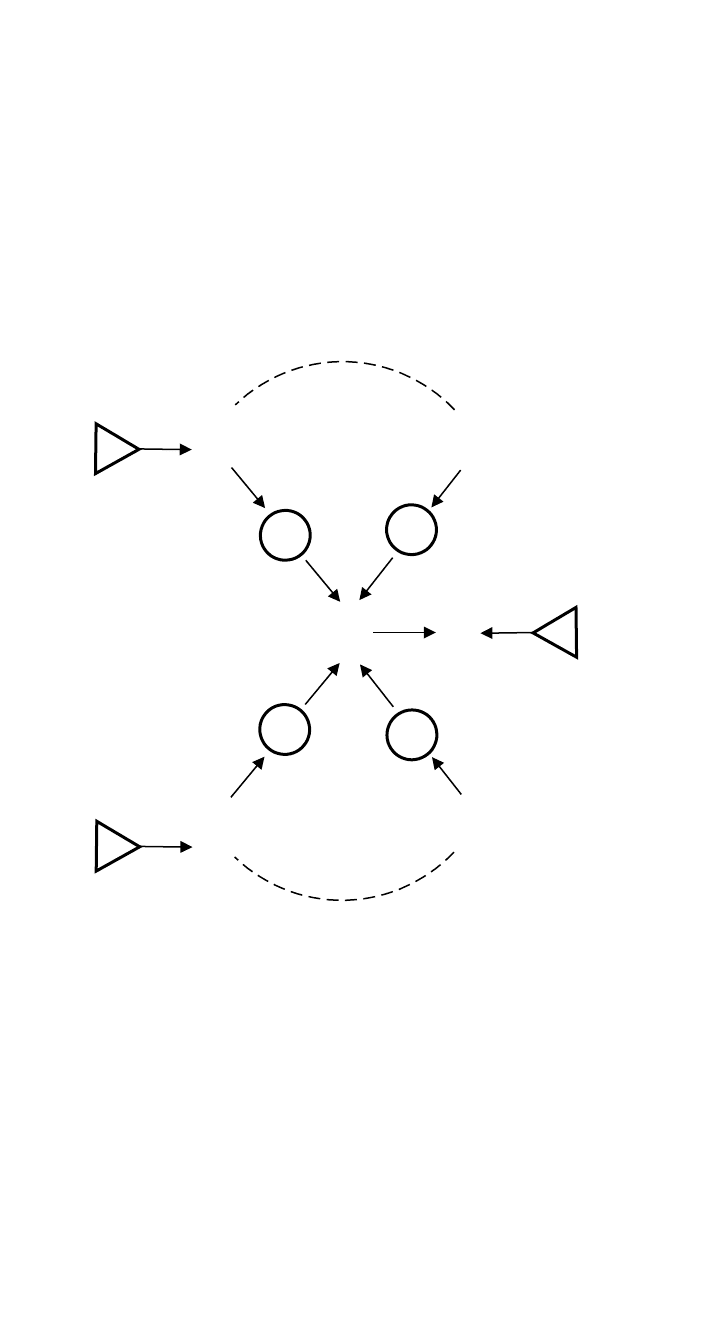
Дифференцируя (3.30) по времени t, получим уравнения, определяющие
коэффициенты функциональных преобразователей связного графа
системы с замкнутыми кинематическими контурами (рис. 3.7)
51
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2
qq
s
1
,
q
f
,
mss ,,2,1
. (3.31)
Применяя закон (2.2) к узлам связного графа, изображенного на рис. 3.7,
получим уравнения динамики:
PP
m
s
1
,
s,,2,1
, (3.32)
которые вместе с (3.30) описывают динамику голономной системы с
замкнутыми кинематическими контурами.
Покажем, что уравнения (3.32) следуют также из общего
уравнения динамики в форме Даламбера – Лагранжа:
0
1
j
m
j
jj
qP
, (3.33)
где
j
q
- вариации перемещений звеньев в кинематических парах. Из
(3.30) следует, что
qq
s
1
,
mss ,,2,1
. С учетом этой
подстановки уравнение (3.33) примет вид
52
1
q
1
Σ
q
1
s
,1
s
m
Рис. 3.7
Φ
ν
+P
ν
Φ
μ
+P
μ
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2

0
1 1
qPP
s m
s
, откуда, в силу независимости
q
,
получим уравнения (3.32).
Таким образом, алгоритм формирования уравнений динамики
механизма с замкнутыми контурами и геометрическими связями может
быть принят следующим.
1) Назначаются обобщенные координаты
q
,
s,,2,1
, механизма с
замкнутыми контурами.
2) Определяются уравнения, связывающие относительные
перемещения звеньев контуров с принятыми обобщенными
координатами.
3) Каждый контур размыкается путем мысленного устранения одной из
кинематических пар, перемещение звеньев которой не является
обобщенной координатой контура.
4) Формируются функции положения полученного в результате
выполнения шага 3) разомкнутого механизма. Кодирование
структуры осуществляется с помощью алгоритма Слиеде.
5) Формируются уравнения динамики разомкнутого механизма в
обобщенных координатах
j
q
,
mj ,,2,1
, согласно (3.3) для модели
с точечными массами или (3.12) для модели с распределенными
массами.
6) Формируются уравнения динамики механизма с замкнутыми
контурами в обобщенных координатах
q
,
s,,2,1
, согласно
(3.32).
На практике часто встречается случай, когда звенья основной
разомкнутой цепи механизма намного массивнее остальных подвижных
звеньев (исполнительные механизмы дорожных, подъемно-
транспортных машин, оснащенных гидроприводом). Тогда, на
предварительном этапе исследования, можно учесть инерцию только
несущих звеньев и сформировать уравнения динамики основной цепи,
53
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2
приняв за обобщенные координаты управляемые перемещения
механизма.
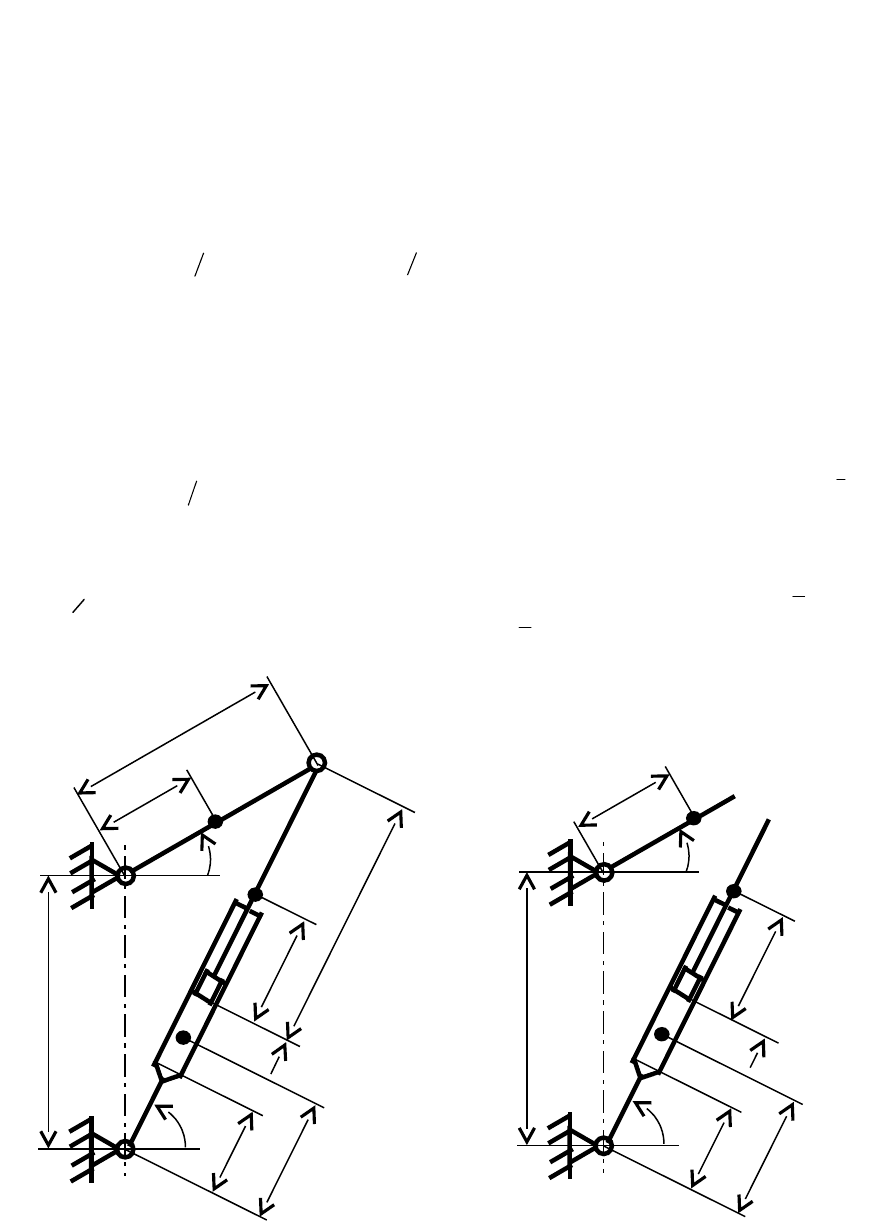
Задача
Получить уравнения динамики механизма с качающимся
цилиндром, изображенного на рис. 3.8. Механизм расположен в
горизонтальной плоскости и движется под действием силы Q
1
со
стороны рабочей жидкости в цилиндре. Инерцией вращения звеньев
относительно их центров масс и силами трения в кинематических парах
пренебречь.
Решение
Рассматриваемый механизм является одноконтурным и имеет одну
степень свободы. За обобщенную координату q
1
примем управляемое
перемещение штока 1 относительно цилиндра 2. Уравнения,
связывающие перемещения звеньев 2 и 3 относительно стойки 0 с
обобщенной координатой, имеют вид [7]:
30
2
3
2
0
2
1
133
2
arcsin)(
BB
BBqB
qfq
,
1
133
122
))(cos(
arccos)(
qB
qfB
qfq
, (3.34)
где
21
BBB
.
Мысленно устраним кинематическую пару, образованную
коромыслом 3 и штоком 1 (рис. 3.9). Полученный разомкнутый
механизм имеет одно ветвление и три степени свободы. Уравнение
динамики коромысла 3 разомкнутого механизма очевидно:
0
3
2
33
qLm
, а
динамика ветви 0 – 2 – 1 описывается уравнениями (см. задачу 2 п. 2.2):
0)(,0)(2)(
11
2
211111212
2
11
2
22
qmqqLmQmqLqqqqLmLm
,
54
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2
где
12
LBL
. Подставляя эти уравнения в (3.32), получим
3
2
333111212
2
11
2
2221
2
211111
)(2))(()( qLmmqLqqqqLmLmqqLmqmQ
,
(3.35)
где
11221
)( qqf
,
11331
)( qqf
. Уравнение (3.35) вместе с (3.34)
описывает динамику механизма с качающимся цилиндром. Если масса
коромысла 3 намного превосходит массу гидроцилиндра, то
приближенная модель динамики механизма будет более простой:
3
2
33311
qLmQ
, где
2
11311313
qqqq
,
1
2
1
2
2
3
2
0
2
1
2
3030131
)()(4)(2
BBqBBBBBqB
,
.)()(4
)()()(2)()(4)(2
2
3
2
2
3
2
0
2
1
2
30
3
30
2
3
2
0
2
1
2
1
2
1
2
2
3
2
0
2
1
2
30
1
10131
BBqBBB
BBBBqBqBBBqBBBBBq
55
Рис. 3.8
m
1
m
2
m
3
q
1
,Q
1
q
2
q
3
L
1
B
1
B
2
L
2
L
3
B
3
B
0
m
1
m
2
m
3
q
2
L
1
B
2
L
3
B
0
q
3
q
1
,Q
1
L
2
Рис. 3.9
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2
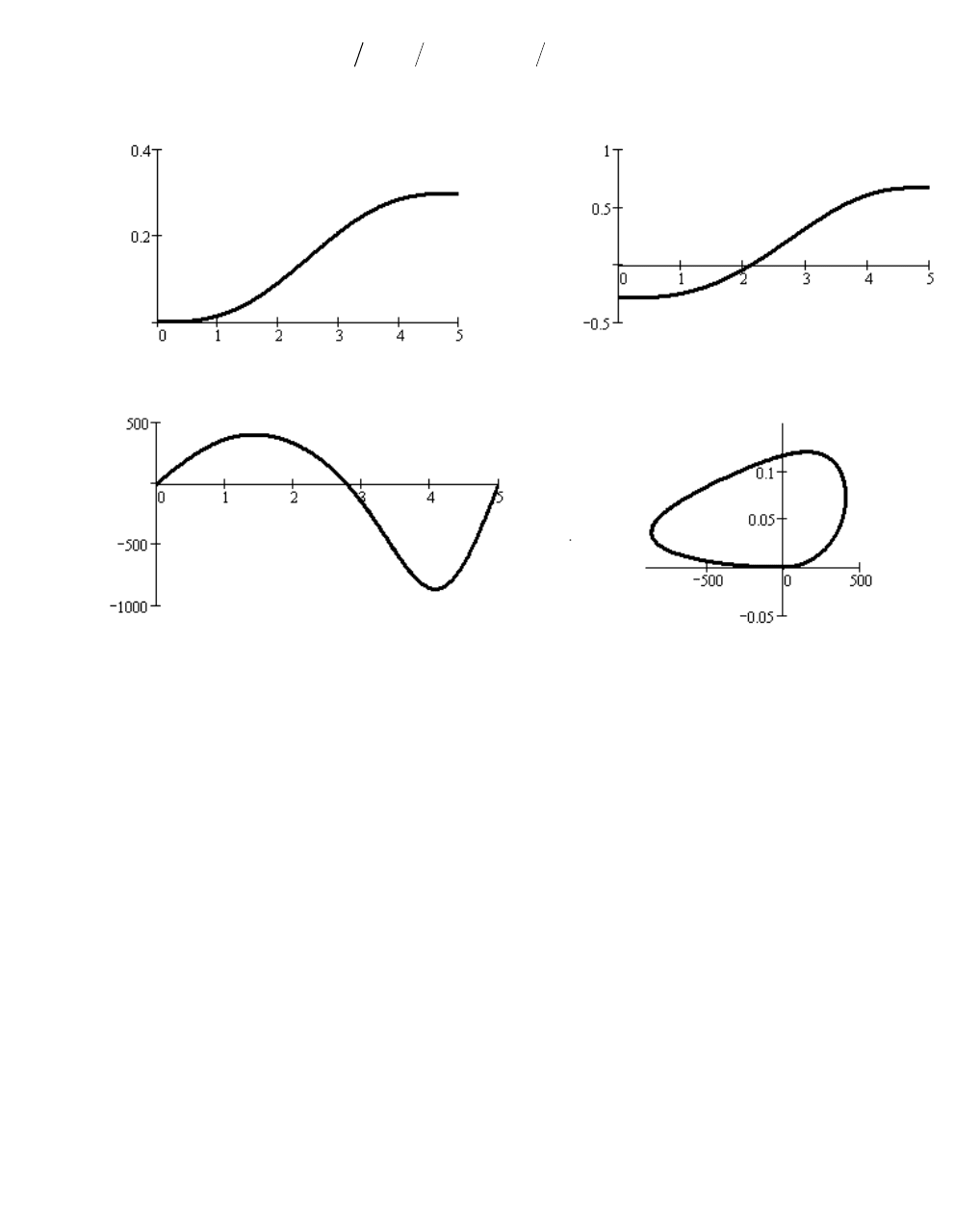
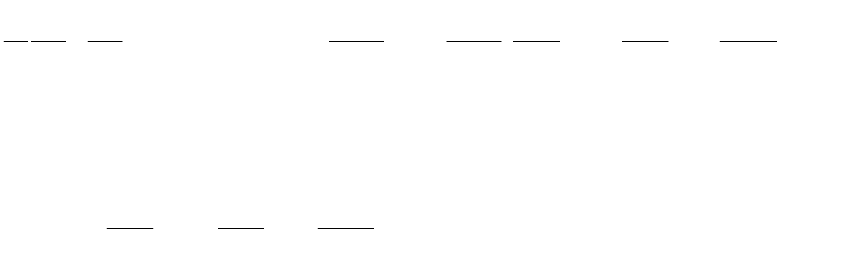
Результаты исследования приближенной модели при значениях
параметров
мBB 7.0
0
,
мB 4.0
3
,
мL 2.1
3
,
кгm 500
3
, законе
движения штока
мtttq ,)2sin(213.0)(
1
,
c5
, приведены на
рис. 3.10.
3.5. Уравнения динамики системы с линейными
неголономными связями
Рассмотрим систему материальных точек P
i
,
Ni ,,2,1
,
движущуюся относительно инерциальной системы отсчета. Пусть на точки
системы наложено s стационарных неголономных связей,
соответствующих уравнениям
0)(
1
m
j
jkj
qqb
,
sk ,,2,1
. (3.36)
Здесь
j
q
- обобщенные координаты системы, число которых составляет
rNm 3
, r – число независимых геометрических связей. При этом будем
полагать, что число степеней свободы системы
0 smn
. Обозначим
),,,( tqqq
jj
- силы инерции точек, приведенные к обобщенным
координатам
j
q
,
),,( tqqQQ
jj
- обобщенные силы. Предположим, что из
56
Рис. 3.10
q
1
, м
t, с
t, с
t, с
Q
1
, Н
Q
1
, Н
dq
1
/dt, м/c
q
3
, рад
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2
всех обобщенных координат независимыми являются
n
qqq ,,,
21
, а
остальные
snnn
qqq
,,,
21
- зависимы. Тогда равенства (3.36) можно
представить в виде:
i
n
i
kikn
qq
1
,
sk ,,2,1
. (3.37)
Коэффициенты
)(q
kiki
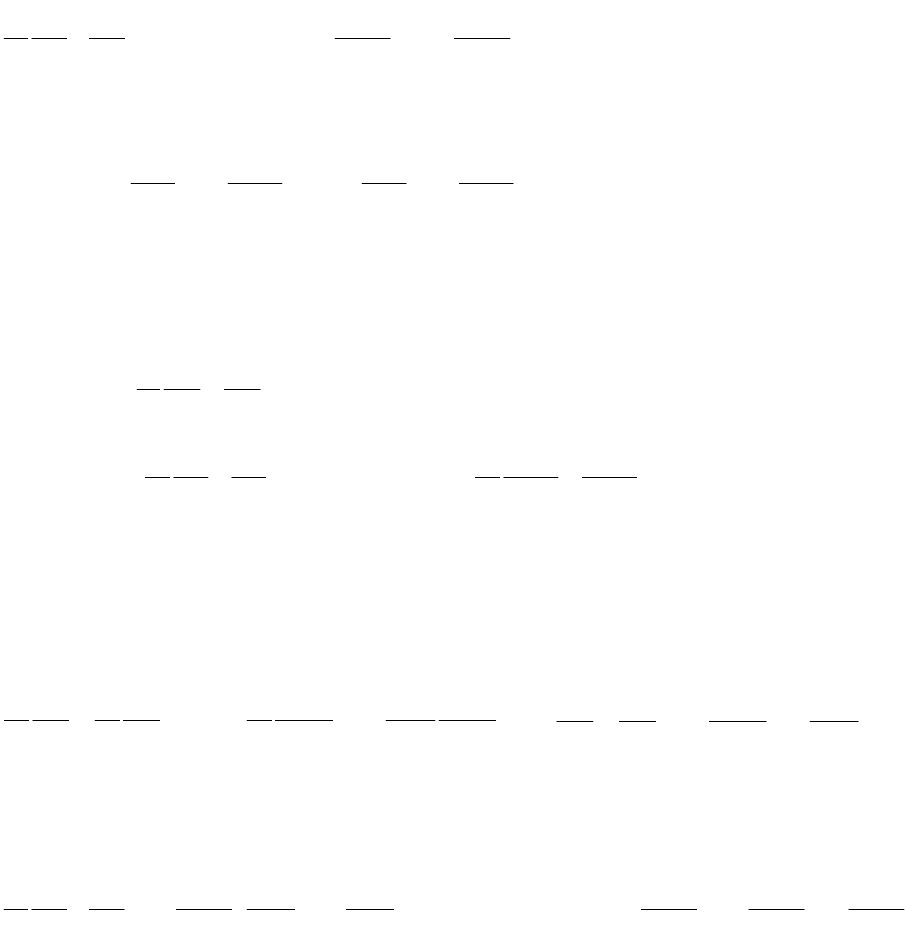
уравнений (3.37) определяют
функциональные преобразователи связного графа неголономной системы,
изображенного на рис. 3.11.
Применяя к узлам графа закон (2.2), получим уравнения [25]
)(
1
knkn
s
k
kiii
QQ
,
ni ,,2,1
, (3.38)
57
i
q
1
ii
Q
∑
1
1i
q
1
1n
q
i
a
1
1
q
11
a
n
a
1
n
q
11 i
a
11
ii
Q
11
nn
Q
Рис. 3.11
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2
которые, совместно с (3.37), описывают динамику рассматриваемой
неголономной системы.
Достоверность уравнений динамики (3.38) покажем, преобразовав их
к известным уравнениям П.В. Воронца [31]:
n
j
j
k
ij
s
k
knkn
kn
s
k
kii
ii
qA
q
T
q
QQ
qqdt
d
1
)(
11
,
ni ,,2,1
, (3.39)
где
s
i
n
kj
i
kj
s
j
n
ki
j
ki
k
ij
qqqq
A
11
)(
;
),,,,,,(
11
tqqqq
nm
-
выражение для кинетической энергии системы, не содержащее величин
kn
q
,
sk ,,2,1
.
Запишем силы инерции, приведенные к обобщенным координатам, в
виде
jj
j
q
T
q
T
dt
d
и подставим их в уравнения (3.38):
knkn
kn
s
k
kii
ii
q
T
q
T
dt
d
QQ
q
T
q
T
dt
d
1
. (3.40)
Здесь
),,,,,,(
11
tqqqqTT
mm
- кинетическая энергия системы.
Согласно [16], имеем:
kn
s
k
ki
kn
s
k
ki
ii
q
T
dt
d
q
T
dt
d
qdt
d
q
T
dt
d
11
,
n
j
l
l
kj
s
k
knll
q
qq
T
qq
T
11
,
ni ,,2,1
,
ml ,,2,1
.
С учетом этих равенств, уравнения (3.40) примут вид
s
k
s
k
n
j
j
kn
kj
knkn
knkii
s
k
n
j
j
i
kj
ki
knii
q
qq
T
q
QQq
qdt
d
q
T
qqdt
d
1 1 11 1
,
откуда получим
58
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2
n
j
j
s
i
n
kj
i
kiki
s
k
knkn
kn
s
k
kii
ii
q
qqdt
d
q
T
q
QQ
qqdt
d
1 111
.
(3.41)
Так как
n
j
j
k
ijj
n
j
s
i
n
kj
i
kiki
qAq
qqdt
d
1
)(
1 1
,
ni ,,2,1
,
sk ,,2,1
, то
уравнения (3.41) тождественны (3.39).
Таким образом, уравнения динамики системы, содержащей
геометрические и дифференциальные неинтегрируемые связи, могут быть
получены в два этапа.
1) Построение связного графа системы с исключенными из нее
неголономными связями и вывод уравнений динамики голономной
системы в обобщенных координатах
2) Наложение дифференциальных неинтегрируемых связей (3.36) и
вывод уравнений динамики неголономной системы согласно (3.38).
Наличие связного графа существенно облегчает как анализ динамических
взаимовлияний в неголономной системе, так и процедуру вывода
уравнений динамики. Уравнения (3.38) имеют общую структуру, что
позволяет их использовать в задачах автоматизации математического
описания динамики механических систем.
Задача
Механическая система состоит из тонкого однородного стержня,
который скользит по гладкой горизонтальной поверхности (рис. 3.12, а); m
– масса, J – момент инерции стержня относительно вертикальной оси,
проходящей через его центр масс C. Стержень движется под действием
системы сил, главный вектор которой F, M - главный момент
относительно точки C. Скорость V центра масс в любой момент времени
59
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2
движения направлена вдоль стержня. Построить связный граф
механической системы и получить ее уравнения динамики.
Решение
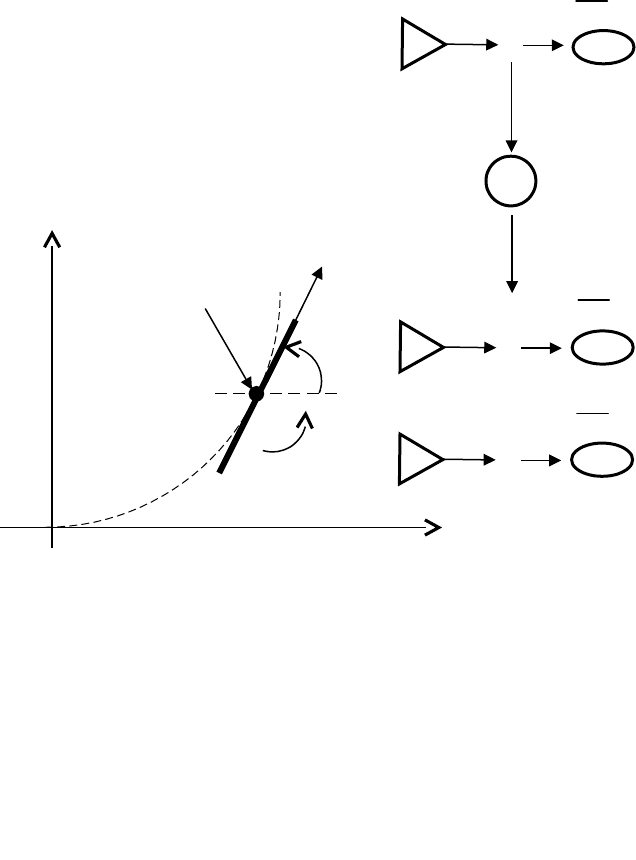
Положение стержня определяется координатами x, y центра масс и
углом φ. Скорость V точки C, исходя из условия задачи:
0 ytgx
. (3.42)
Уравнение (3.42) задает дифференциальную неинтегрируемую связь,
следовательно, рассматриваемая система является неголономной.
Связный граф системы будет иметь вид (рис. 3.12, б). Анализ графа
показывает, что перемещение φ независимо, тогда как перемещения x и
y взаимосвязаны, т.е. система имеет две степени свободы. Уравнения
динамики получим, применяя к узлам графа закон (2.2):
60
O
x
φ
C
V
F
M
Рис. 3.12
x
xm
dt
d
1
F
x
tg
y
1
F
y
1
M
ym
dt
d
J
dt
d
а) б)
звено i
звено i - 1
звено i
звено i - 1
1
2
1
2