Kounadis A.N., Gdoutos E.E. (Eds.) Recent Advances in Mechanics
Подождите немного. Документ загружается.

Experimental Mechanics in Nano-engineering 299
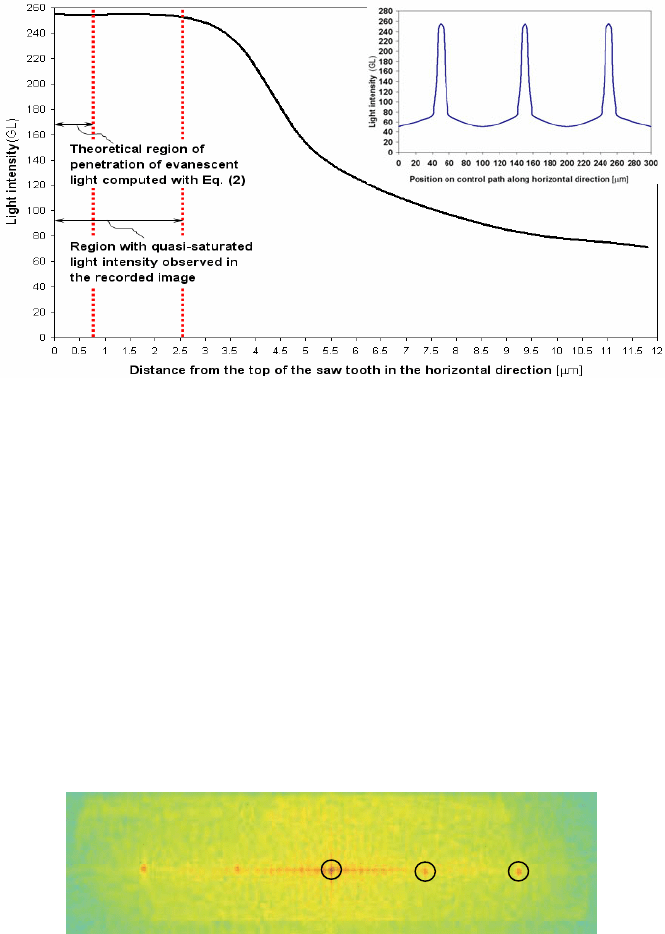
Fig. 18. Intensity distribution received by the CCD camera sensor observing in the direction
normal to the plane of the grating.
The corresponding depth of penetration of the evanescent field computed with
Eq. (2) is 89.6 nm. Consequently, the size of the region of illumination caused by
the evanescent field is 750 nm.
Figure 18 shows in the insert the distribution of light intensity in the image as a
function of the coordinates of the field of view. It can be seen that the bright
illumination corresponds to a very small region of the saw tooth surface. The
figure shows the intensity distribution in the brightest area. It is indicated the
region where the direct influence of the evanescent field manifests itself. In this
region, there is saturation of the sensor. At about 3.5 times the theoretical distance
computed with Eq. (2) the intensity begins to decay reaching a minimum of about
20% of the maximum intensity in the central valley. Figure 18 indicates that the
main source of light energy in the Fabry-Perot cavity is the evanescent field.
1
st
order
2
n
d
order
0 order
Fig. 19. FT pattern of the 5 μm pitch grating imaged by the CCD. The first harmonic
(corresponding to the pitch of 5 μm) and the second harmonic (corresponding to the pitch
of 2.5 μm) are visible in the FT spectrum.

300 C.A. Sciammarella, F.M. Sciammarella, and L. Lamberti
Figure 19 shows the diffraction orders for the 5 μm pitch grating. The third
order (1.25 μm pitch) is not present in the FT pattern because the numerical
aperture of the utilized microscope objective limited the angular spectrum to the
first two orders. However, by utilizing double illumination it is possible to carry
out measurements with sensitivity corresponding to the 1.25 μm pitch.
3.3.1 Determination of the Size of the Field of View
In order to perform the measurement of the geometric parameters defining the
tooth shape one needs to know precisely the size of the field of view. The
following procedure has been applied. The grating superimposed on the top of the
standard is focused and the corresponding order n
g
of the grating is determined
from the FT pattern. Then, it can be written:
pnL
gw
=
(28)
where p is the pitch of the grating. The field of view is hence known with an
accuracy determined by the pitch of the grating. In order to increase the accuracy
it is possible to utilize several orders of one grating and proceed to apply the
method that will be explained later in the paper.
3.3.2 Determination of the Saw Tooth Geometry
The determination of geometric dimensions of the tooth includes two different
steps. First, the pitch of the saw tooth is determined from the FT pattern of the
image: the order n
p
corresponding to the number of saw teeth included in the field
of view is extracted. Then, m harmonics of the order n
p
are considered.
The pitch of the tooth L
t
can be obtained by dividing the size of the field of
view L
w
by the order corresponding to the number of teeth included in the image.
Hence, one must interpolate the fraction of pixels that will correspond to the actual
tooth pitch. For the first harmonic, the pitch of the tooth is given by the equation:
pnL
pt
=
(29)
The number of teeth N
t
included in the recorded image is equal to the ratio:
twt
L/LN =
(30)
By replacing in Eq. (30) the expressions (28) and (29) written for L
w
and L
t
, it
follows:
p
g
p
g
t
w
t
n
n
pn
pn
L
L
N =
⋅
⋅
==
(31)
Experimental Mechanics in Nano-engineering 301
In order to determine precisely the ratio n
g
/n
p
, the higher harmonics of the order n
p
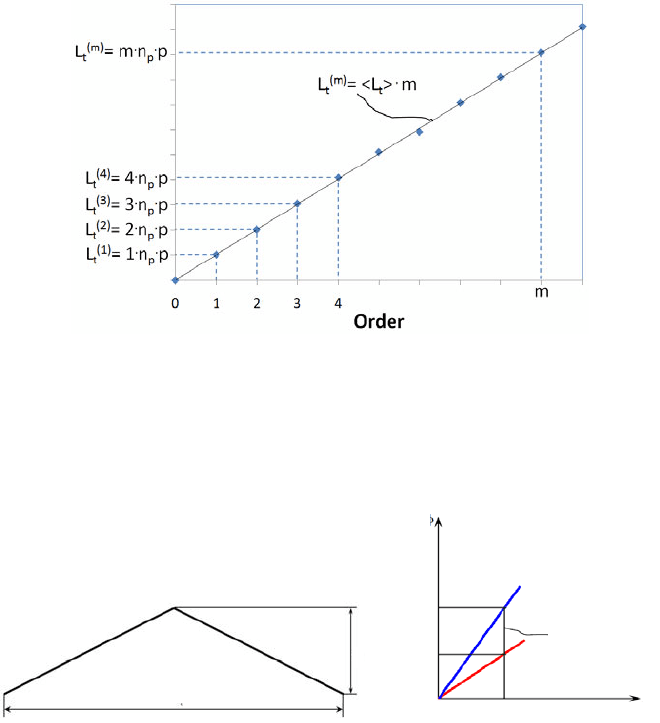
available in the FT pattern must be considered. In Fig. 20, the multiple values of
the tooth pitch are plotted as a function of the corresponding order. By utilizing
the minimum least square regression of the computed values, a line going through
the origin of coordinates is obtained. The slope of this line is the most accurate
value of the saw tooth pitch. Thus the quantization in pixels of the coordinates of
the space can be compensated.
Fig. 20. Determination of the pitch of the saw tooth
The height h
t
of the saw tooth (Figure 21a) is determined by considering that
the equivalent grating formed in the process of illumination and projected onto the
standard is modulated by the slope of the surface.
I
I
m
c
I
c
<
b)
f
x
a)
h
t
L
t
Fig. 21. a) Main geometric dimensions of the saw tooth; b) Relationship between total
phase, carrier phase and modulation function.
The intensity distribution of the modulated carrier is (see [30,31] and the
references cited in the former paper):

302 C.A. Sciammarella, F.M. Sciammarella, and L. Lamberti
The phase of the moiré fringes thus formed can be determined as [30,31]:
where the different quantities entering in the above relationship are represented in
Fig. 21b.
The phase of the carrier is:
x
p
2
c
π
=φ
(34)
The modulation function can be expressed as:
)cx(
p
2
sin)x( ⋅
π
⋅θ=Ψ
(35)
where θ is the illumination angle of the projection moiré equivalent scheme (see
Fig. 16). In the present case, c corresponds to the constant slope of the tooth
surface.
The total phase of the modulated carrier for one saw tooth hence is:
tttooth1,mc
L
p
2
)h2(
p
2
sin)x( ⋅
π
+⋅
π
⋅θ=φ
(36)
The term 2h
t
must be introduced in Eq. (36) in order to account for the fact that
each tooth is comprised of two sides with positive and negative slopes
respectively.
For the entire field of view containing N
t
saw teeth, the total phase is:
ttttooth1,mctTOT
L
p
2
N)h2N(
p
2
sin)x(N)x(
π
⋅+⋅⋅
π
⋅θ=φ⋅=φ
(37)
In order to compute precisely the phase modulation term
⎥
⎦
⎤
⎢
⎣
⎡
⋅⋅
π
⋅θ )h2N(
p
2
sin
t
for the entire field of view, one can use a process
similar to that described previously for the tooth pitch.
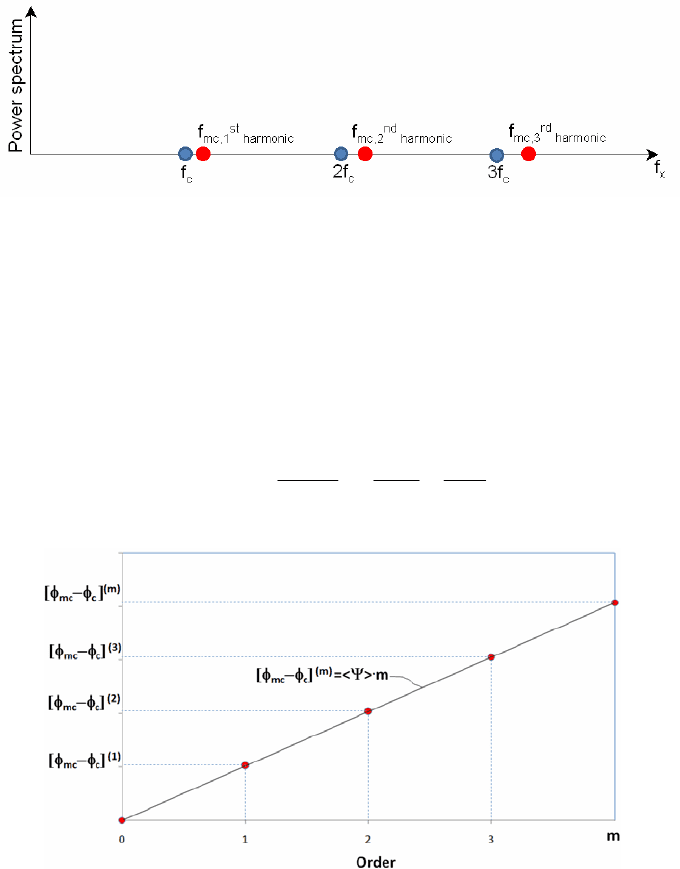
Figure 22 shows the FT of the image containing the carrier frequency f
c
and the
modulated carrier frequency f
mc
for the first three harmonics. The difference
between the phase of the modulated carrier and the phase of the carrier can be
determined for each harmonic in the whole field of view.
(32)
(33)
Experimental Mechanics in Nano-engineering 303
Fig. 22. Schematic representation of the different harmonics extracted from the FT
spectrum. The carrier frequency f
c
is a known quantity. The frequency of the modulated
carrier f
mc
is close to the carrier frequency.
In Fig. 23, the multiple values of the modulated phase are plotted as a function
of the corresponding order. By fitting data of Fig. 23 in the least square sense, a
line going through the origin of coordinates is obtained. The slope of this line
represents the most accurate value of the average change in phase per order <Ψ>
that can be computed for the recorded image. From this value, it is possible to
determine the height of the saw tooth pitch as follows:
t
t
N2
1
sin
p
2
h ⋅
⎟
⎠
⎞
⎜
⎝
⎛
θ
⋅
⎟
⎠
⎞
⎜
⎝
⎛
π
>Ψ<
=
(38)
Fig. 23. Determination of the height of the saw tooth
The value of R
a
evaluated, accordingly to ANSI B46.1, from the experimental
data gathered with the present advanced digital moiré contouring technique falls in
the 3.0175÷3.0784 μm range certified by NIST. The average measured pitch is
101.24 μm with a standard deviation of ±0.322 μm. The average measured depth
is 6.078 μm: the average value of Ra is hence 3.039 μm, well within the range of
304 C.A. Sciammarella, F.M. Sciammarella, and L. Lamberti
NIST’s measurements. The difference between the value of roughness measured
optically and the average value of roughness indicated by NIST is only 0.231%
(i.e. 3.039 μm vs. 3.032 μm).
a)
b)
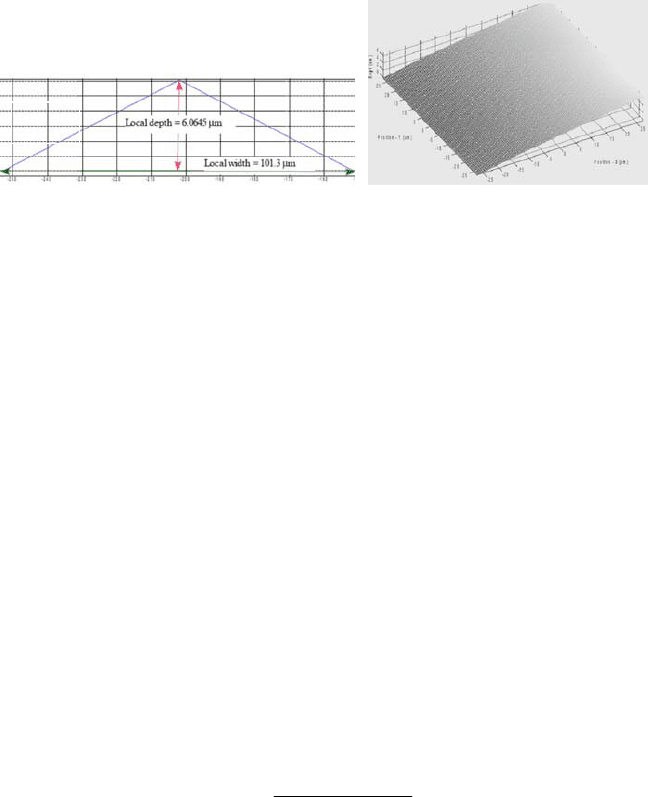
Fig. 24. a) Detail of one tooth; b) 3D MATLAB representation of the reconstructed surface
of half of one tooth.
Finally, a square area has been extracted from the image and resized to
2048×2048 pixels in order to precisely reconstruct the profile of one saw tooth.
Figure 24 shows the tooth profile and the reconstructed 3D shape of the tooth. The
local height of the tooth profile measured in this region is 6.0645 μm, practically
the same as the nominal height of 6 μm. The local length of the tooth is 101.3 μm,
very close to nominal length of 100 μm. The average R
a
is 3.0505 μm and
oscillates between 3.0175 μm and 3.0785 μm. By extracting different profiles it is
possible to make an estimate of the average surface finish of the standard. The
average depth thus determined is 6.035±0.1367 μm. Therefore, the finish of
surface standard can be estimated as 0.1367 μm / 0.635 μm, that is about λ/5.
4 Determination of Contact Strains
The analyzed metallic surface is made of copper and presents a system of furrows
that contain some frequencies that can be utilized as carrier fringes. In preceding
papers, this procedure was referred to as holographic moiré. Although there is not
a physical carrier (i.e. a grating), the frequency of the reference grating can be
extracted from the FT spectrum of the image. The in-plane strains can be directly
derived from the basic equation of holographic moiré [32-38]:
)90sin(2
u
i
θ−°
λ
=
(39)
This is the fundamental equation of holographic moiré to get in-plane
displacements. It corresponds to the double illumination setup that makes the
sensitivity vector
→
S equal to:
Experimental Mechanics in Nano-engineering 305
→→→→
•−= d)kk(S
21
(40)
where
1
→
k and
2
→
k are the two symmetrical illumination vectors with respect to
the normal to the observed surface and
→
d is the displacement vector.
The strains in the contact surface can be computed through direct
differentiation in the Fourier space of the unwrapped phase of the displacement
field. This procedure was successfully applied to measurements in the micron
range in a number of cases [38,39].
4.1 Determination of the Contact Strains of a Small Cylinder
In this work, the contact strains of a small cylinder of 10 mm in diameter and 8
mm in thickness were measured using an SPR based optical setup. The specimen
was made of copper and the contact surface was finished with grooves created by
scratching the surface with sandpaper. The same procedures of calibration of the
pixel values and of the field of view applied in the contouring experiments
described in Section 3.3 were utilized also in the strain determination experiments.
The modulus of elasticity of the copper specimen is 117 GPa while the Poisson’s
ratio is 0.3. The yield limit is 48 MPa.
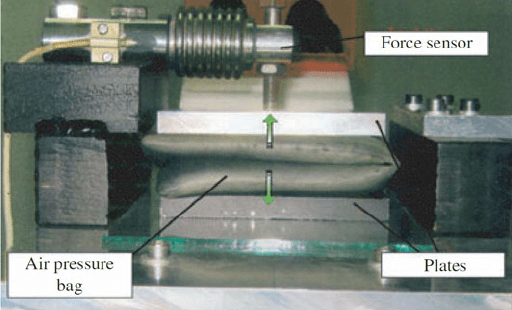
Fig. 25. Loading device with the cantilever load measuring system used in the strain
determination experiments. The specimen, a small cylinder, is compressed between the
aluminum plate shown in the picture and the glass surface. The specimen is not visible.
Figure 25 shows the loading device built for the strain determination
experiments. A rubber bag is inflated to compress the specimen between an
aluminum plate and a glass plate. The cantilever beam shown in the figure is part
of a sensor that has a strain gage (Wheastone bridge) to measure the strain level.
306 C.A. Sciammarella, F.M. Sciammarella, and L. Lamberti
The sensor was calibrated utilizing dead weights resulting in a linear function load
in N vs. the readings in με of the bridge. Three cycles of loading were applied.
The “unloaded” images for the specimens contact stress were taken with an initial
small load to eliminate rigid body motions.
Equation (39) allowed in-plane displacements of the loaded copper cylinder to
be computed. Images from the central portion of the specimen (35x35 μm) were
recorded for the unloaded state and then for the successive loads. The changes in
the surface shape caused by the presence of contact loads were determined by
subtracting the phase of the “loaded” image from the phase of the “unloaded”
image. Then, strains were obtained by the direct differentiation of the unwrapped
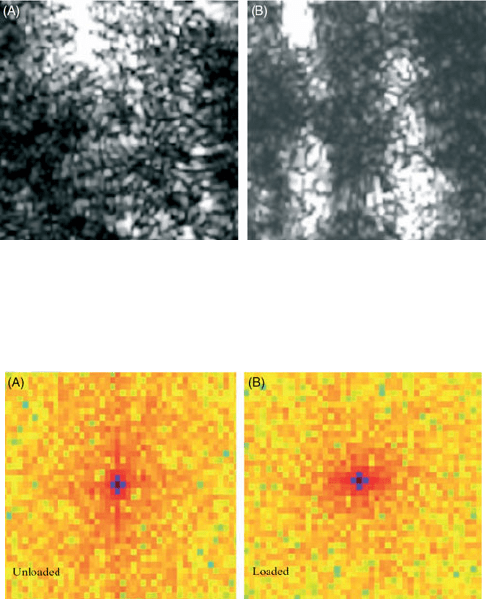
phase pattern. Figure 26a shows the recorded pattern corresponding to the
“unloaded” state while Fig. 26b shows the recorded pattern corresponding to the
contact load of 286 N. The Fourier transforms of those images are shown in Fig.
27a and Fig. 27b, respectively.
Fig. 26. Portion of contact region (35x35 μm) in the central part of the cylindrical
specimen (diameter 10 mm and thickness 8 mm): a) pattern corresponding to zero loading;
b) pattern corresponding to the load of 286 N.
Fig. 27. a) Fourier transform of Fig. 26a; b) Fourier transform of Fig. 26b.

Experimental Mechanics in Nano-engineering 307
After the specimen was loaded, the changes in the reflectivity experienced by
the specimen surface made it possible to observe the contact area between the
glass and the copper cylinder. The contact area is an ellipse of major axis 5 mm
and minor axis 3.5 mm. As a first approximation, one can assume that the
maximum Hertzian pressure is 1.5 times the average contact pressure of 20.8 MPa
(i.e. 286N /π(2.5mmx1.75mm). Therefore, the expected maximum value of stress
at the center of the contact area should be σ
max
=31.2 MPa. From the stress-strain
curve of the copper plotted in Fig. 28, the corresponding deformation of the
surface in the point of maximum contact pressure would be approximately 500 με.
Such a value is well below than the 0.2% (i.e. 2000 με) off-set yield strain.
Fig. 28. Typical constitutive behavior of copper under tension: a) Engineering and true σ-ε
curves; b) Enlarged view of the initial region where yield strain is defined.
However, it can be seen from Fig. 29 that the strain values in the central region
of the specimen are much higher than 200 με. This fact indicates the presence of a
local strain field produced by the contact between the asperities of the copper
surface and the glass surface. At the edges of the circular region shown in Fig. 29
a)
b)
Fig. 29. a) Map of the strain ε
x
obtained for the contact load of 286 N; b) 3-D view of the
same map.
a)
b)
308 C.A. Sciammarella, F.M. Sciammarella, and L. Lamberti
strains are mostly tensile and very high. The order of magnitude reached by the
strain in this region corresponds to the part of the stress-strain curve limited by the
red parenthesis in Fig. 28a. The region where high tensile stresses take place is
outside of the contact area while the central part of contact area is under
compressive stresses.
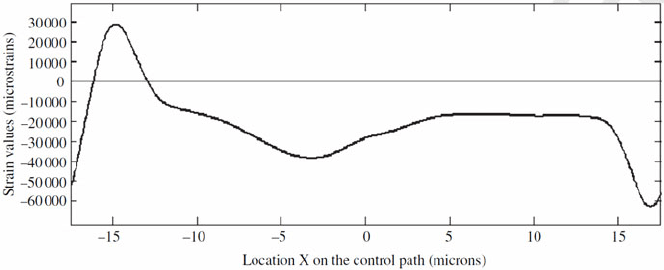
The strain distribution along the horizontal cross-section corresponding to the
X-axis is plotted in Fig. 30. Since strain peaks are located at the path edges, micro-
cracking may occur at the corresponding points. In order to verify this hypothesis,
the topography of the contact region was analyzed in detail.
Fig. 30. Distribution of strain ε
x
along the horizontal diameter of Fig. 29 (white line control
path).
Figure 31a shows the surface profile before loading: depth values ranged from
1 to 3 μm. Figure 31b shows the final configuration taken by contact surface when
the 286 N load was applied. It can be seen that depth values changed significantly
as they go from 0.2 μm to a maximum of 1.4 μm. The differences of depth
between the initial and the final surface configurations are shown in Fig. 31c:
these values were obtained by simply subtracting the data of Fig. 31b from the
data of Fig. 31a. The contact area indeed experienced large plastic deformations. It
was flattened in agreement with the results of the strain analysis of the surface.
The results of the present experiments are another verification of the model
introduced by Johnson in Contact Mechanics to explain the wear mechanism of
rolling surfaces [40]. Modeling this mechanism was proven to be a very difficult
challenge. The resulting wear particles are platelets that lie parallel, or nearly so, to
the rolling surface, on the planes of maximum compressive stress. The large plastic
strains measured in this experiment confirm the hypothesis that the resulting cracks
are ductile fractures, driven by plastic strain rather than the elastic stress intensity
instability and that these severe plastic strains are the consequence of the contact
between asperities. In the present experiment one of the contacting surfaces, the
glass plate, is very smooth. Therefore, the operating mechanism is one of flattening
the copper asperities against the supporting glass plate. The results presented in this