Koren B., Vuik K. (Editors) Advanced Computational Methods in Science and Engineering
Подождите немного. Документ загружается.

Least-Squares Spectral Element Methods in Computational Fluid Dynamics
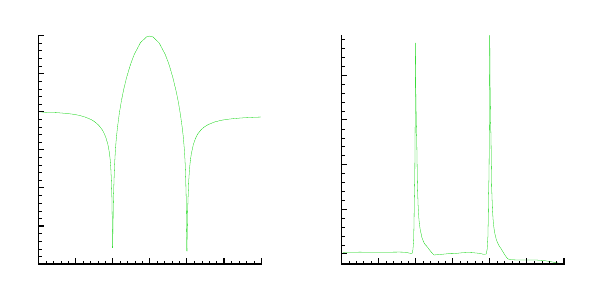
The results along the lower wall for a polynomial degree N = 4, integration order
P = 5, are displayed in Fig. 15. This figure shows that the resolution of the stagnation
points is very pronounced and the flow almost retains its inflow Mach number after
the bump. The entropy change remains very small over the bump and the artificial
entropy increase is restricted to the location of the stagnation points.
X
M
0 0.5 1 1.5 2 2.5 3
0.1
0.2
0.3
0.4
0.5
0.6
0.7
(a) Mach number
X
Entropy
0 0.5 1 1.5 2 2.5 3
0
0.005
0.01
0.015
0.02
(b) Entropy
Fig. 15 The Mach number and entropy distribution for the subsonic flow on a refined mesh
6.1.2 Results for transonic flow
To investigate the transonic flow over a bump the geometry is the same as that for
the transonic flow problems described by Spekreijse, [78], and Rizzi and Viviand,
[76].
As in the subsonic case, the chord length of the bump is c = 1. The length of the
channel however, is 5 times the chord length and the height is set at 2.073 times the
chord length. The height of the bump is 4.2% of the chord length. The mesh used
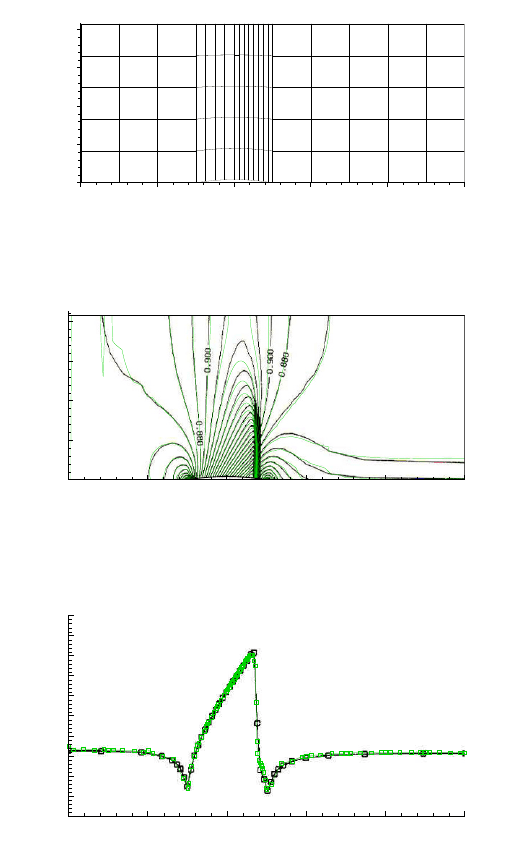
for this test case is shown in Fig. 16. The polynomial degree is N = 5 whereas the
integration order is P = 6.
In Fig. 17 the Mach contours at an inflow Mach number of M = 0.85 are com-
pared to the finite volume results produced by Spekreijse, [78].
The shock is positioned at approximately 86% of the bump with the Mach num-
ber just upstream of the shock being M ≈ 1.32. These results are quantitatively in
agreement with the finite volume results obtained by Spekreijse. In Fig. 18 the Mach
number distribution along the lower wall of the channel is shown.
203
Marc Gerritsma and Bart De Maerschalck
0 1 2 3 4 5
0
0.5
1
1.5
2
Fig. 16 The mesh used for the transonic test case. The height of the bump is 4.2% of the chord
length and 100 elements are used.
x
y
0 1 2 3 4 5
0
0.5
1
1.5
2
x
y
0 1 2 3 4 5
0
0.5
1
1.5
2
Fig. 17 Iso-Mach lines for transonic flow, M = 0.85, obtained by LSQSEM (green) and Finite
Volume Method by Spekreijse [78], (black)
x
M
0 1 2 3 4 5
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
Fig. 18 Mach number distribution along the lower wall of the channel for a M = 0.85 flow:
LSQSEM solution (green line) and Finite Volume results obtained by Spekreijse, [78], (black line)
204
Least-Squares Spectral Element Methods in Computational Fluid Dynamics
6.1.3 Results for supersonic flow
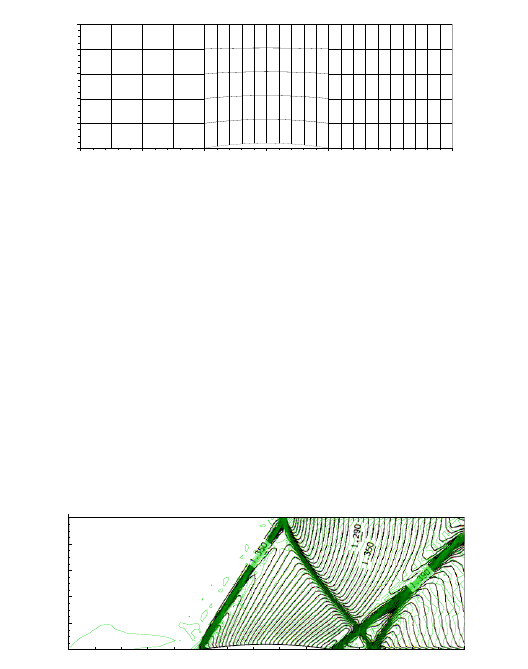
The geometry used for the supersonic test case is similar to that considered for the
subsonic flow test case. The only difference is the height of the bump which is 4%
of the chord length for this test case. The mesh has a total of 120 elements as can be
seen in Fig. 19.
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
1
Fig. 19 The mesh used for the supersonic test case. The height of the bump is 4% of the chord
length and 120 elements are used.
At inflow the density is set to
ρ
= 1.4 and the pressure to p = 1. The Mach
number at the inlet boundary is M = 1.4.
At the leading edge of the bump a shock develops and runs into the domain until
it is reflected by the upper wall. From the trailing edge a shock originates at a slightly
smaller angle than the shock at the leading edge. In the region behind the bump the
two shocks collide and then merge into a single shock. The iso-Mach contours for
this test case are shown in Fig. 20 together with the results obtained by Spekreijse,
[78]. This figure reveals that the shock structures agree.
x
y
0 1 2 3
0
0.2
0.4
0.6
0.8
1
x
y
0 1 2 3
0
0.2
0.4
0.6
0.8
1
Fig. 20 Iso-Mach lines and shock structure obtained by LSQSEM (green) and Finite Volume
Method by Spekreijse [78], (black)
205
Marc Gerritsma and Bart De Maerschalck
7 Miscellaneous topics
In this section several topics will be discussed which improve the performance of
LSQSEM.
7.1 hp-adaptive LSQSEM
Although the combination of the least-squares formulation and the spectral ele-
ment technique leads to a very robust scheme which does not require any form
of stabilization and renders highly accurate solutions, using high order polynomi-
als throughout the entire computational domain is very expensive. The following
procedure is described in [33].
7.1.1 The mortar element method
Mortar
Computational domain
Ω
1
Ω
2
Ω
3
Ω
2
Ω
3
Ω
1
γ
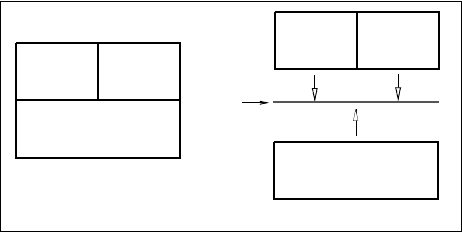
Fig. 21 The mortar element approach - patching the element edges with one
approximation space
In the mortar element method (MEM), neighbouring elements in R
d
are patched
together by mortar-like elements in R
d−1
. In R
2
the mortar elements consist of line
segments as sketched in Fig. 21. The i
th
boundary of element k, denoted by
Γ
k
i
, is
associated with a number of mortars,
γ
j
. The solution on the mortars,
φ
, is connected
to the solution at the border of the two neighboring elements. This establishes a
connection between the solution at the edge of an element, denoted by u
b
, and the
mortar solution
φ
. If we choose a polynomial approximation for
φ
on the mortar, we
can express the expansion coefficients at the boundary of the element, u
b
, in terms
of the expansion coefficients of the solution on the mortar,
φ
, as
u
b
=
˜
Z
φ
. (76)
206
Least-Squares Spectral Element Methods in Computational Fluid Dynamics
The precise relation is inconsequential as long as the matrix
˜
Z is of full rank for
at least one of the elements associated with the mortar. This condition prevents the
appearance of spurious mortar solutions.
Having established the relation between the elemental boundary unknowns and
the mortar unknowns, we can express the global system in terms of the inner element
unknowns, u
i
and the mortar unknowns
φ
only:
u
k
=
u
b
u
i
=
˜
Z 0
0 I
φ
u
i
=
h
Z
k
i
˜u
k
, (77)
where ˜u
k
represents the true unknowns, i.e. the projected mortar values and the
internal unknowns.
This transformation converts the least-squares formulation into
L
T
WLu
k
= L
T
Wf
k
⇐⇒
h
Z
k
i
T
L
T
WL
h
Z
k
i
˜u
k
=
h
Z
k
i
T
L
T
Wf
k
. (78)
Assembling all element contributions by summing over the projected element ma-
trices gives the global system to be solved.
In this paper the solution on the mortar is defined by an L
2
-projection of the
element boundary solution
Z
¯
Γ
k
l
(u|
Ω
k
−
φ
)
ψ
ds = 0, ∀ sides l and k = 1,.. .,K , (79)
where
ψ
∈P
M
¯
Γ
k
l
and M is the polynomial degree of the mortar solution. M should
be greater than or equal to the degree of the solution in the adjoining elements to
prevent spurious mortar solutions. When the Lagrangian basis functions, defined in
Section 3, are employed, the vertex condition (Maday et al. [56]) is automatically
satisfied. For a more extensive treatment of the mortar element method the reader is
referred to [48, 56].
7.1.2 The error estimator
Having discussed how to match spectral elements with different size and polyno-
mial representation, we now have to find a way to detect those elements that need
refinement.
In the least-squares formulation we select the solution which minimizes the resid-
ual globally over the whole domain
Ω
. Having obtained such a minimizing solution
we can evaluate the least-squares functional locally over every sub-domain A ⊂
Ω
.
This gives
η
2
A
= kL u
h
− f k
2
L
2
(A)
= kL
u
h
−u
ex
k
2
L
2
(A)
, (80)
due to the linearity of L . Well-posedness of the problem (30) then implies that
α
2
kek
2
X(A)
≤
η
2
A
≤C
2
kek
2
X(A)
, (81)
207

Marc Gerritsma and Bart De Maerschalck
where e = u
h
−u
ex
. This means that the effectivity index
θ
A,X
, defined by
θ
A,X
=
η
A
kek
X(A)
, (82)
which compares the estimated error
η
A
to the exact error in the X-norm is bounded
by
α
≤
θ
A
≤C . (83)
Alternatively, we may compare the estimated norm
η
A
with the residual norm
kRk
L
2
(A)
using the fact that the residual norm is norm equivalent to kek
X
. Denot-
ing this effectivity index by
θ
A,R
gives the rather trivial result
θ
A,R
:=
η
A
kL u
h
− f k
Y(A)
≡ 1 . (84)
Based on this observation
η
A
will be used to identify those regions (elements in
case A =
Ω
k
) which are selected for refinement. This estimator has also been used
by Liu, [54] and Berndt et al., [4].
7.1.3 Estimation of the Sobolev regularity
Having found a way to match functionally and geometrically non-conforming ele-
ments and an indicator
η
Ω
k
which flags elements for refinement, we now have to
determine how to refine. This choice is based on the smoothness of the underlying
exact solution. If the exact solution is locally sufficiently smooth, polynomial en-
richment is employed. However, if on the other hand, the underlying exact solution
has limited smoothness h-refinement is used.
Let
κ
be a spectral element with size parameter h
κ
and polynomial degree p
κ
.
Let u
κ
ex
be the exact solution in that element, where u
κ
ex
∈H
k
κ
, where k
κ
≥0 denotes
the Sobolev regularity of the exact solution. Let u
h
κ
p
κ
denote the LSQSEM solution
with u
h
κ
p
κ
∈ H
q
, 0 ≤ q ≤k
κ
then
ku
κ
ex
−u
h
κ
p
κ
k
H
q
≤C
(h
κ
)
s
k
−q
(p
κ
)
k
κ
−q
ku
κ
ex
k
H
k
κ
, (85)
where s
κ
= min(p
κ
+ 1,k
κ
) and C is a generic constant. This error estimate tells
us that if the solution is very smooth (k
κ
very large) then the error decreases more
rapidly by increasing p
κ
in the denominator. For practical purposes the function
is considered smooth if k
κ
> p
κ
+ 1 and non-smooth when k
κ
≤ p
κ
+ 1, in which
h-refinement is more effective.
So the choice between h-refinement and p-enrichment is dictated by the Sobolev
index of the exact solution. Although the exact solution is in general not available,
we can still estimate this index from its numerical approximation. Houston et al.,
[50] have developed a method to estimate the Sobolev index from a truncated Leg-
208
Least-Squares Spectral Element Methods in Computational Fluid Dynamics
endre series. They assume that the one-dimensional solution is in L
2
(−1,1) which
allows for a Legendre expansion
u(x) =
∞
∑
i=0
a
i
L
i
(x) , with a
i
=
2i + 1
2
Z
1
−1
u(x)L
i
(x)dx . (86)
By Parseval’s identity the fact that u ∈L
2
(−1,1) is equivalent to convergence of the
series
∞
∑
i=0
|a
i
|
2
2
2i + 1
. (87)
In [50] it is shown that if
∞
∑
i=[k+1]
|a
i
|
2
2
2i + 1
Γ
(i + k + 1)
Γ
(i −k + 1)
, (88)
converges, then u ∈H
k
w
(−1,1), where
H
k
w
=
(
u ∈ L
2
(−1,1)
k
∑
j=0
Z
1
−1
D
( j)
u(x)
2
1 −x
2
j
dx < ∞
)
, (89)
for integer values of k. By using the
Γ
-function in (88) this identity can be extended
to fractional Sobolev spaces, see [50] for details.
Given the Legendre coefficients a
i
, convergence of the series in (88) can be es-
tablished by well-known techniques such as the ratio test, or the root test.
In this work the root test is employed. This leads to the calculation of
l
k
=
log
2k+1
2|a
k
|
2
2logk
. (90)
If l = lim
k→∞
l
k
> 1/2 then u ∈ H
l−1/2−
ε
w
(−1,1), ∀
ε
> 0. Else u ∈L
2
(−1,1). Since
in a numerical solution only a finite number of Legendre coefficients a
i
are available,
this test is applied to the highest Legendre coefficient available in the numerical
approximation. Based on the estimated Sobolev index l −1/2, the decision is made
whether to refine the mesh, or to increase the polynomial degree locally.
This one-dimensional estimate of the Sobolev index can be extended to multi-
dimensional problems by treating each co-ordinate direction separately, see [50] for
details. Several tests have been performed to establish the validity of this estimator.
Proposition 1. If an element
κ
at refinement level r with characteristic mesh size
h
r
κ
and polynomial degree p
r
κ
is flagged for refinement by the error indicator, we
calculate l
p
κ
by (90). Then for the Sobolev index k
p
κ
= l
p
κ
−1/2 we have
If k
p
κ
> p
r
κ
+ 1 then p
r+1
κ
← p
r
κ
+ 1 .
If k
p
κ
≤ p
r
κ
+ 1 then h
r+1
κ
← h
r
κ
/2 .
(91)
209
Marc Gerritsma and Bart De Maerschalck
7.1.4 Application to the space-time linear advection equation
This section uses the one-dimensional, linear advection problem to validate the pre-
sented hp-adaptive theory. The application of LSQSEM to hyperbolic equations has
been studied by De Maerschalck, [18, 19, 20, 21].
The model problem is defined as
∂
u
∂
t
+ a
∂
u
∂
x
= 0 with 0 ≤ x ≤ L, t ≥ 0, a ∈R (92)
u(0,t) = 0 , (93)
u(x,0) =
1
2
−
1
2
cos
2
π
x−x
0
L
0
if x
0
≤ x ≤ x
0
+ L
0
0 elsewhere .
(94)
where a is the advection speed and L is the length of the domain in spatial direction.
On the left boundary of the domain a Dirichlet boundary condition, u(0,t) = 0, is
imposed. The initial disturbance, u(x,0), is a cosine-hill with offset x
0
and width L
0
.
We use a space-time formulation that treats the one-dimensional advection problem
0 0.5 1
X
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Y
Fig. 22 Illustration of the unstructured mesh and continuous propagation of
the cosine-hill with hp-refinement
with a two-dimensional least-squares formulation and considers the time variable t
210
Least-Squares Spectral Element Methods in Computational Fluid Dynamics
as second spatial variable. Instead of calculating the solution over the whole domain
at once, we use a semi-implicit approach. The domain is subdivided into several
space-time strips for which the solution is approximated using the LSQSEM, see
[20] for details. In the following, 32 time strips are used within the domain
Ω
=
[0,1], where each time strip has initially 32 cells. Each time strip uses the solution at
the previous strip as initial condition, except for the first strip that uses the prescribed
initial condition (94). All time strips use the Dirichlet condition (93) on the left
boundary. The advection speed a = 0.85, x
0
= 0.13 and L
0
= x
0
+ 0.5. The exact
solution of this problem u
ex
∈ H
5/2−
ε
(
Ω
), for all
ε
> 0. The regularity of the exact
solution is limited in space-time over the lines x−at = x
0
and x −at = x
0
+ L
0
. For
all other points in the space-time domain the solution is infinitely smooth.
7.1.5 Illustration of an hp-adaptive strategy
Note that even though only the second derivative is discontinuous, the regularity
estimator accurately identifies the region with limited regularity as depicted in Fig-
ure 22. No h-refinement is used in the smooth parts of the domain.
0 0.5 1
X
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Y
8
7
6
5
4
3
2
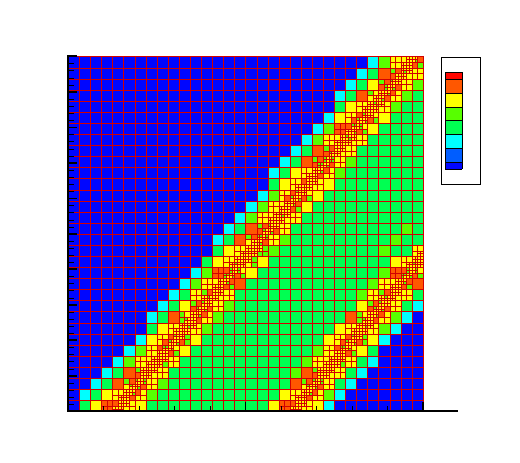
Fig. 23 Polynomial degree distribution for hp-adaptivity within each element
Figure 23 shows the final polynomial degree distribution. We imposed the so-
called 1-level adaptivity, where the difference in refinement level between neigh-
bouring elements may not be more than one. In the regions where the exact solution
211
Marc Gerritsma and Bart De Maerschalck
is zero neither p-enrichment nor h-refinement is used. Along the cosine hill polyno-
mials of degree N = 4 are used, the green strip. The only place where the algorithm
uses higher order elements is along the lines with limited regularity. Along these
lines both p-enrichment and h-refinement are employed.
The reason high order elements are used along these lines is that in order to pre-
dict the Sobolev regularity accurately enough, one needs sufficiently high Legendre
coefficients.
7.2 Direct Minimization
In this section an alternative method will be described which minimizes the residual
directly in contrast to the conventional least-squares formulation where one employs
variational analysis to set up the weak formulation. The resulting condition number
is only the square root of the condition number that would be obtained if the conven-
tional least squares method had been used. In addition, the new method circumvents
a costly matrix-matrix multiplication thus avoiding loss of precision and fill-in in
the stiffness matrix. This approach is also described in [49].
7.2.1 Conventional least-squares finite element method
In Section 2 and 3 the approach for the conventional or variational least-squares
formulation is described. This approach can be summarized as
(L (u),L (v)) = ( f,L (v)) ⇐⇒
Z
Ω
L (u)L (v)d
Ω
=
Z
Ω
f L (v)d
Ω
∀v ∈X(
Ω
) .
(95)
The next step consists of domain decomposition where the integration over
Ω
is
written as the sum of the integrals over the sub-domains
Ω
k
, k = 1,.. .,K,
∑
k
Z
Ω
k
L (u)L (v)d
Ω
k
=
∑
k
Z
Ω
k
f L (v)d
Ω
k
∀v ∈ X(
Ω
k
) . (96)
∑
k
"
∑
i
u
N,k
i
Z
Ω
k
L (
φ
i
)L (
φ
j
)d
Ω
k
#
=
∑
k
Z
Ω
k
f L (
φ
j
)d
Ω
k
∀
φ
j
, j = 1, ..., N .
(97)
It suffices in (97) to take v =
φ
j
, because L is assumed to be a linear operator and
since any arbitrary v in the finite-dimensional subspace is a linear combination of
these basis functions.
Inserting the Gauss-Lobatto integration then gives
212
N,k
=
∑
i
u
N,k
i
φ
i
(x),
where the
φ
i
are basis functions, which span the finite-dimensional subspace over
Ω
k
Then we insert the finite-dimensional approximation for each element u