King M.R., Mody N.A. Numerical and Statistical Methods for Bioengineering: Applications in MATLAB
Подождите немного. Документ загружается.


The Lagrangian function for a minimization problem subjected to m equality con-
straints and p inequality constraints is
L x; lðÞ¼f xðÞþ
X
m
j¼1
l
j
h
j
ðxÞþ
X
p
k¼1
l
mþk
g
k
xðÞþσ
2
k
: (8:16)
Equation (8.16) is the augmented objective function in n + m +2p v ariables with no
constraints. At the optimum point,
h
j
x
ðÞ¼0;
g
k
x
ðÞþσ
2
k
¼ 0;
and
L x
; λðÞ¼f x
ðÞ:
A solution is a feasible critical point if it satisfies the following conditions:
∂Lðx; λÞ
∂x
i
¼ 0; i ¼ 1; 2; ...; n;
∂Lðx; λÞ
∂l
j
¼ 0; j ¼ 1; 2; ...; m þ p;
∂Lðx; λÞ
∂σ
k
¼ 2l
mþk
σ
k
¼ 0; k ¼ 1; 2; ...; p :
Note that when σ
k
6¼ 0, the kth inequality constraint is inactive and l
mþk
¼ 0, since
this inequality constraint does not affect the search for the optimum.
Example 8.4
Minimize the function
fx
1
; x
2
ðÞ¼x
1
þ 1ðÞ
2
x
1
x
2
; (8:17)
subject to the constraint
gx
1
; x
2
ðÞ¼x
1
x
2
4:
The Lagrangian function for this constrained problem is given by
Lx
1
; x
2
; l; σ
2
¼ x
1
þ 1ðÞ
2
x
1
x
2
þ l x
1
x
2
4 þ σ
2
:
A critical point of L satisfies the following conditions:
∂L
∂x
1
¼ 2 x
1
þ 1ðÞx
2
l ¼ 0;
∂L
∂x
2
¼x
1
l ¼ 0;
∂L
∂l
¼x
1
x
2
4 þ σ
2
¼ 0;
∂L
∂σ
¼ 2lσ ¼ 0 :
The last equation states that if the inequality constraint is inactive (σ
2
4
0Þthen l ¼ 0, and if the inequality
constraint is active (σ
2
¼ 0Þthen l 6¼ 0. In other words, both σ and λ cannot be non-zero simultaneously.
When l ¼ 0, only the first two conditions apply. In this case the critical point is given by
x
1
¼ 0; x
2
¼ 2:
527
8.4 Constrained nonlinear optimization
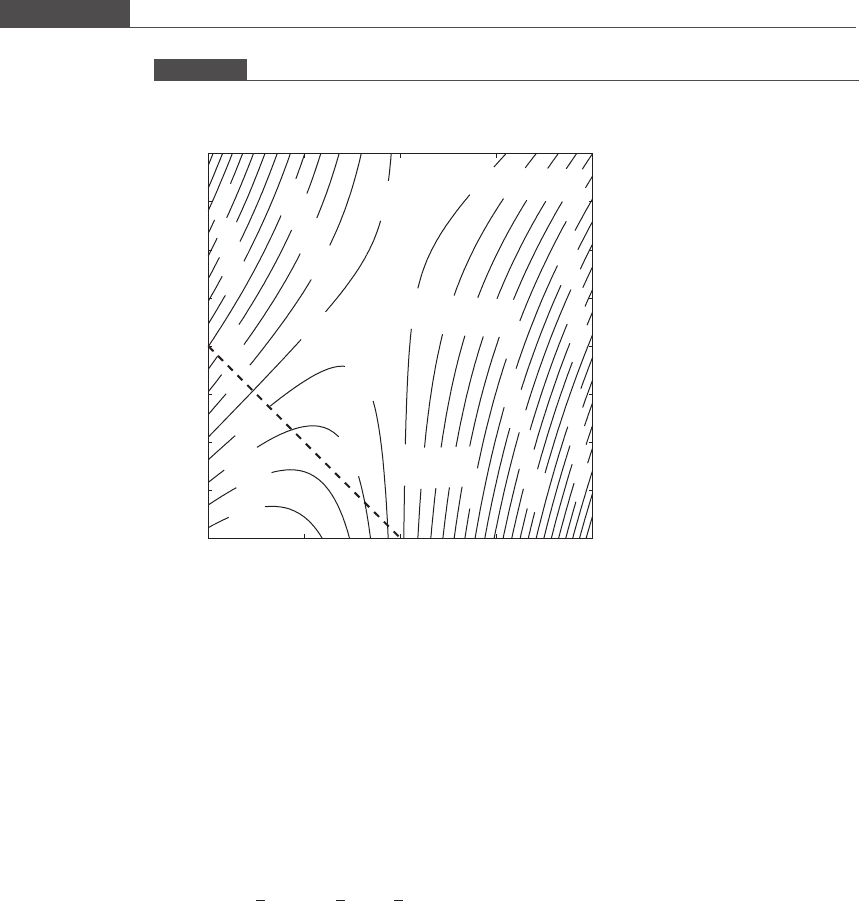
This is a saddle point, as is evident from the contour plot shown in Figure 8.21. The Hessian of the objective
function at point (0, 2) is given by
H ¼
2 1
10
;
and H
jj
¼1
5
0: Therefore, the Hessian is not positive definite at this critical point, and (0, 2) is
not a local minimum. Note that the Hessian is also not negative definite, indicating that this point is also
not a local maximum.
When l 6¼ 0, the first three conditions reduce to a system of three simultaneous linear equations whose
solution is
x
1
¼
3
2
; x
2
¼
5
2
; l ¼
3
2
:
Upon inspection of Figure 8.21, we find that this is indeed a local minimum of the constrained function.
Another technique used to solve constrained optimization problems is the penalty
function method, in which a penalty function is constructed. The penalty function is a
parameterized objective function that is not subject to any constraints. The penalty
function can be minimized using any of the techniques discussed in Section 8.3. If the
constrained optimization problem is to minimize fðxÞ, subject to m equality con-
straints h
j
xðÞ¼0; j ¼ 1; 2; ...; m, then the penalty function is defined as
5
P xðÞ¼f xðÞþr
X
m
j¼1
h
j
xðÞ
2
; (8:18)
Figure 8.21
Contour plot of the objective function with the inequality constraint shown by the dashed line. The feasible region is
located above this line
−6.11538
−4.23077
−2.34615
−2.34615
−0.461538
−0.461538
1.42308
1.42308
1.42308
1.42308
1.42308
3.30769
3.30769
3.30769
3.30769
3.30769
5.19231
5.19231
5.19231
5.19231
5.19231
7.07692
7.07692
7.07692
7.07692
7.07692
8.96154
8.96154
8.96154
8.96154
10.8462
10.8462
10.8462
10.8462
12.7308
12.7308
12.7308
14.6154
14.6154
14.6154
16.5
16.5
1
6.5
18.3846
18.3846
18.3846
20.2692
20.2692
22.1538
22.1538
24.0385
25.9231
27.8077
29.6923
31.5769
33.4615
x
1
x
2
−4
−2
0
2
4
−4
−3
−2
−1
0
1
2
3
4
5
The penalty function can be constructed in several different ways.
528
Nonlinear model regression and optimization

where the parameter r is a positive number. The penalty function method is an
iterative minimization scheme in which the value of r is gradually increased at each
iteration, and Equation (8.18) is successively minimized to obtain a series of optimal
points. The penalty function is first minimized using a small value of r, say 1.0. The
optimum value of x obtained at this iteration is used as the starting guess value for
the next iteration, in which the value of r is increased. The increase in r with each
subsequent iteration shifts the optimum point of Equation (8.18) towards the
optimum x*off xðÞ.Whenr ! ∞, k hxðÞk!0, and the optimum of the penalty
function approaches the optimum of the objective function. Inequality constraints
can also be incorporated into a penalty function through the use of slack variables,
as demonstrated earlier in the Lagrange multiplier method.
Using MATLAB
The fmincon function in Optimization Toolbox performs constrained minimiza-
tion of a function of several variables. The constraints can be of the following types:
(1) linear inequality and equality constraints: Ax b; A
eq
x ¼ b
eq
,
(2) nonlinear inequality and equality constraints: Cx 0; C
eq
x ¼ 0,
(3) bounds: l ≤ x ≤ u, where l is the lower bound vector and u is the upper bound vector.
The syntax for fmincon is
x = fmincon(func, x0, A, b, Aeq, beq, lb, ub, confunc, options)
func returns the value of the objective function at any point x; x0 is the starting guess
point, A is the linear inequality coefficient matrix, b is the linear inequality constants
vector, Aeq is the linear equality coefficient matrix, and beq is the linear equality
constants vector. If there are no linear inequality constraints, assign a null vector [] to
A and b. Similarly, if no linear equality constraints exist, set Aeq = [] and beq=[].
Note that lb and ub are vectors that define the upper and lower bounds of the
variables. If no bounds exist, use a null vector as a place holder for lb and ub.
Also, confunc is a function that defines the nonlinear inequality and equality con-
straints. It calculates the values of Cx and C
eq
x. The objective function func is
minimized such that Cx 0andC
eq
x ¼ 0. If nonlinear constraints do not exist for
the problem, then the non-existent function should be represented by a null vector [].
There are several different ways in which the functi on can be called. See help
fmincon for more infor mation on its syntax.
Example 8.5
Use fmincon to solve the constrained optimization problem described in Example 8.4.
We create two functions m-files, one to evaluate the objective function, and the other to evaluate the
nonlinear constraint.
MATLAB program 8.20
function f = func(x)
f = (x(1) + 1)^2 - x(1)*x(2);
In MATLAB, we type the following. The output is also displayed below.
44
A = [-1 -1]; b = 4;
44
fmincon (‘func’, [0,1], A, b)
529
8.4 Constrained nonlinear optimization
Warning: Trust-region-reflective method does not currently solve this
type
of problem, using active-set (line search) instead.
> In fmincon at 439
Local minimum found that satisfies the constraints.
Optimization completed because the objective function is non-
decreasing in
feasible directions, to within the default value of the function
tolerance,
and constraints were satisfied to within the default value of the
constraint tolerance.
<stopping criteria details>
Active inequalities (to within options.Tolcon = le-006) :
lower upper ineqlin ineqnonlin
1
ans =
-1.5000 -2.5000”
What happens if you provide the initial guess point as (0, 2), which is the saddle point of the objective
function?
8.5 Nonlinear error analysis
Nonlinear regression gives us best-fit values of the parameters of the nonlinear
model. It is very important that we also assess our confidence in the computed
values and future model predictions. The confidence interval for each parameter
conveys how precise our estimate of the true value of the parameter is. If the
confidence intervals are very wide, then the fitted model is of little use. The true
parametric values could lie anywhere within large confidence intervals, giving us
little confidence in the best-fit values of our model. In Chapter 3, we demonstrated
how to obtain the covariance matr ix Σ
2
x
of the linear model parameters x:
Σ
2
x
¼ E x μ
x
ðÞx μ
x
ðÞ
T
:
Along the diagonal of the covariance matrix are the variances associated with each
best-fit parame ter, which are used to estimate the confidence intervals.
Two popular techniques for estimating the error associated with the fitted
nonlinear model parameters are the undersampling method and the bootstrap
method. In both methods, several data sets are generated by reproducing values
from the original data set. The mathematical model is then fitted to each of the data
sets derived from the master data set. This produces several sets of parameters and
therefore a distribution of values for each parameter. The distributions are used to
calculate the variances and covariances for each pair of parameters.
(1) The method of undersampling This method is very useful when a large data set is
available. Suppose N is the number of data points in the data set. If every mth point
in the data set is picked and used to create a new, smaller data set, then this new data
set will contain N/m points, and m distinct data sets can be derived this way. In this
method each data point in the original data set is used only once to create the m
derived sets. The model is fitted to each of the m data sets or “samples” to produce m
estimates of the model parameters. The standard deviation of each parameter can be
530
Nonlinear model regression and optimization
calculated from their respective distributions. Alternatively, the covariance matrix
can be estimated using the following formula:
Σ
2
ij
¼ s
2
x
i
x
j
¼
1
m 1
x
i
x
j
x
i
x
j
: (8:19)
Equation (8.19) is the estimated covariance between the ith and jth model parameter,
where i; j ¼ 1; 2; ...; n. Two limitations of this method are (i) N must be large and (ii)
the nonlinear regression must be performed m times, which can be a time-consuming
exercise.
(2) The bootstrap method This method is appropriate for large as well as moderately
sized data sets. The N data points in the data set serve as a representative sample of
the infinite number of observable data points. Another data set of size N can be
created by performing random sampling with replacement (via a Monte Carlo
simulation) from the N data points of the original data set. In this manner, m data
sets are constructed from the original data set. Nonlinear regression is then per-
formed m times (once for each newly constructed data set) to obtain m sets of the
parameter values. The covariance between each pair of parameters is calculated using
Equation (8.19). You may ask, How many N sized data sets should be produced from
the original data? Note that m should be large enough to reduce sampling bias from
the bootstrap procedure, which can influence the covariance estimate.
Box 8.4B Kidney functioning in human leptin metabolism
Estimate the variance in the model parameters K
m
and R
max
using the bootstrap method.
The data set has N = 16 points. We generate m = 10 data sets each with 16 data points, by
replicating the data points in the original data set. Program 8.22 performs the bootstrap routine and calls
fminunc to perform a nonlinear regression to obtain best-fit parameter values for all ten data sets.
Note the use of the MATLAB function cov(X) in Program 8.21. This function calculates the
covariance between the n variables that are represented by the n columns in the m × n matrix X,
where each row is a different observation.
A nonlinear optimization algorithm may not always converge to the correct optimal solution. Be
aware that, occasionally, automated optimization procedures can produce strange results. This is why
good starting guesses as well as good choices for the options available in minimizing a function are
critical to the success of the technique. We present here the results of a successful run. The ten sets of
best-fit values for the two parameters of the model were obtained as follows:
pdistribution =
4.4690 29.7062
7.1541 70.2818
4.3558 32.4130
3.2768 18.2124
4.4772 21.9166
8.1250 50.4744
3.2075 26.1971
4.1410 22.5261
7.0033 60.6923
3.5784 21.1609
The mean of each distribution is
R
max
¼ 4:979;
K
m
¼ 35:358:
531
8.5 Nonlinear er ror analysis

The covariance matrix is computed as
Σ ¼
3:147 29:146
29:146 339:49
:
From the covariance matrix we obtain the standard deviations of the distribution of each parameter as
s
R
max
¼ 1:774
and
s
K
m
¼ 18:42:
MATLAB program 8.21
% Bootstrap routine is performed to estimate the covariance matrix
clear all
global S
global R
% Data
% Plasma leptin concentration
Sorig = [0.75; 1.18; 1.47; 1.61; 1.64; 5.26; 5.88; 6.25; 8.33; ...
10.0;11.11; 20.0; 21.74; 25.0; 27.77; 35.71];
% Renal Leptin Uptake
Rorig = [0.11; 0.204; 0.22; 0.143; 0.35; 0.48; 0.37; 0.48; 0.83; ...
1.25; 0.56; 3.33; 2.5; 2.0; 1.81; 1.67];
% Other variables
N = length(Sorig); % size of original data set
m = 10; % number of derived data sets of size N
% Bootstrap to generate m data sets
dataset(1:N,2,m) = 0;
for i = 1:m
for j = 1:N
randomno = floor(rand()*N + 1);
dataset(j,:,i) = [Sorig(randomno) Rorig(randomno)];
end
end
% Perform m nonlinear regressions
pdistribution(1:m, 1:2) = 0; % preallocating m sets of parameter
values
for i = 1:m
S = dataset(:,1,i);
R = dataset(:,2,i);
p0 = [1.732, 10.87]; % initial guess value obtained from Box 3.9A
p1 = fminunc(‘SSEleptinuptake’, p0);
pdistribution(i,:) = p1;
end
% Calculate the covariance matrix
sigma = cov(pdistribution);
muRmax = mean(pdistribution(:,1));
muKm = mean(pdistribution(:,2));
532
Nonlinear model regression and optimization

8.6 End of Chapter 8: key points to consider
(1) The optimal value of the parameters of a nonlinear model are obtaine d by perform-
ing nonlinear least-squares regression or minimization of
SSE ¼
X
m
i¼1
y
i
^
y
i
ðÞ
2
:
Least-squares regression provides the “best-fit” for the model parameters if the
following assumptions are true:
(a) variability is dominant in the values of the dependent variable y (i.e. the inde-
pendent variables are precisely known),
(b) the observations are normally distributed about the y-axis,
(c) all observations are independent of each other, and
(d) the data exhibit homoscedasticity.
(2) A point at which the gradient (or first derivative) of a function is zero is called a
critical point. This point can either be a minimum, maximum, or saddle point of the
function.
(3) Unconstrained minimization of an objective function in one variable can be carri ed
out using Newton’s method, successive parabolic interpolation, or the golden sec-
tion search method.
(a) Newton’s method has a second-order rate of convergence and is preferred when
the first and second derivatives of the object ive function are well-defined and easy
to calculate.
(b) The golden section search method has a first-order rate of convergence and
is preferred when the derivative of the function does not exist at one or
more points near or at the minimum, or when the derivative is difficult to
calculate.
(c) The parabolic interpolation method is a convenient method to use since it does not
compute the function derivative and has superlinear convergence.
(4) For a single-variabl e optimization problem, the nature of the critical point can be
tested using the second derivative test. For a multivariable problem, the nature of the
critical point can be established by evaluating the matrix of second partial deriva-
tives of the objective function, called the Hessian matrix. A critical point x* is a local
minimum if Hx
ðÞis positive definite, and is a local maximum if Hx
ðÞis negative
definite.
(5) Unconstrained multidimensional optimization can be carried out using the
method of steepest descent, Newton’s multidimensional method, or the simplex
method.
(a) The steepest descent method evaluates the gradient of the objective function
to determine a search direction. An advantage of this method is that the
starting guess values do not need to be close to the minimum to attain
convergence.
(b) Newton’s multidimensional method evaluates the gradient vector and the Hessian
matrix of the function at each step. This method has a fast rate of convergence,
but convergence is guaranteed only for good initial guess values.
(c) The simplex method performs function evaluations (but not derivative evalua-
tions) at multiple points in the variable space. It draws a geometrical structure
called a simplex that gradually shifts towards the minimum.
533
8.6 Key points
(6) The variables of an objective function fðxÞ can have constraints placed on them.
Constraints can be of two types:
(a) equality constraints h
j
xðÞ¼0; j ¼ 1; 2; ...; m,or
(b) inequality constraints g
k
xðÞ0; k ¼ 1; 2; ...; p.
(7) The Lagrange multiplier method performs constrained minimization by converting
an optimization problem in n variables and m + p constraints into an unconstrained
problem in n + m +2p variables. The inequality constraints are converted to
equality constr aints with the use of slack variables.
(8) Bootstrapping and unders ampling are used to estimate the covariance matrix, and
thereby the confidence intervals, of model parameters whose values are obtained
using nonlinear regression.
8.7 Problems
8.1. Nonlinear regression of a pharmacokinetic model The following equation
describes the plasma drug concentration for a one-compartment pharmacokinetic
model with first-order drug absorption:
CðtÞ¼C
0
expðk
1
tÞexpðk
2
tÞ½:
Such a model has been successfully used to describe oral drug delivery. Given a set of
experimental data (tdat,Cdat), write a MATLAB function that can be fed into the
built-in function fminsearch to perform a nonlinear regression for the unknown
model parameters C
0
, k
1
,andk
2
. Try your function on the data set given in Table P8.1.
8.2. A classic test example for multidimensional minimization is the Rosenbrock banana
function:
fðxÞ¼100 x
2
x
2
1
2
þ 1 x
1
ðÞ
2
:
The traditional starting point is (−1.2, 1). Start by defining a function m-file that
takes in x
1
and x
2
as a single vector x and outputs the value of fðxÞ. Next, use the
built-in MATLAB function fminsearch to solve for the minimum of the above
equation, starting from the specified point of (−1.2,1). Use the optional two-output-
argument syntax of fminsearch so that the minimum x and the function value are
reported. Use your resul ts to answer the following “riddle”: when is a root-finding
problem the same as a minimization problem?
8.3. Leukocyte migration in a capillary Many times in (biomedical) engineering, after
an external stimulus or signal is applied, there is a time delay where nothing
happens ... and then a linear response is observed. One example might be a
leukocyte (white blood cell) that is squeezing through a small capillary. A positive
pressure is applied at one end of the capillary, and, foll owing a short delay, the
leukocyte begins to move slowly through the capillary at a constant velocity.
Table P8.1. Time course of drug concentration in plasma
Time (h) 0123456789101112
Plasma
conc.
(mM)
0.004 0.020 0.028 0.037 0.040 0.036 0.028 0.021 0.014 0.009 0.007 0.004 0.002
534
Nonlinear model regression and optimization
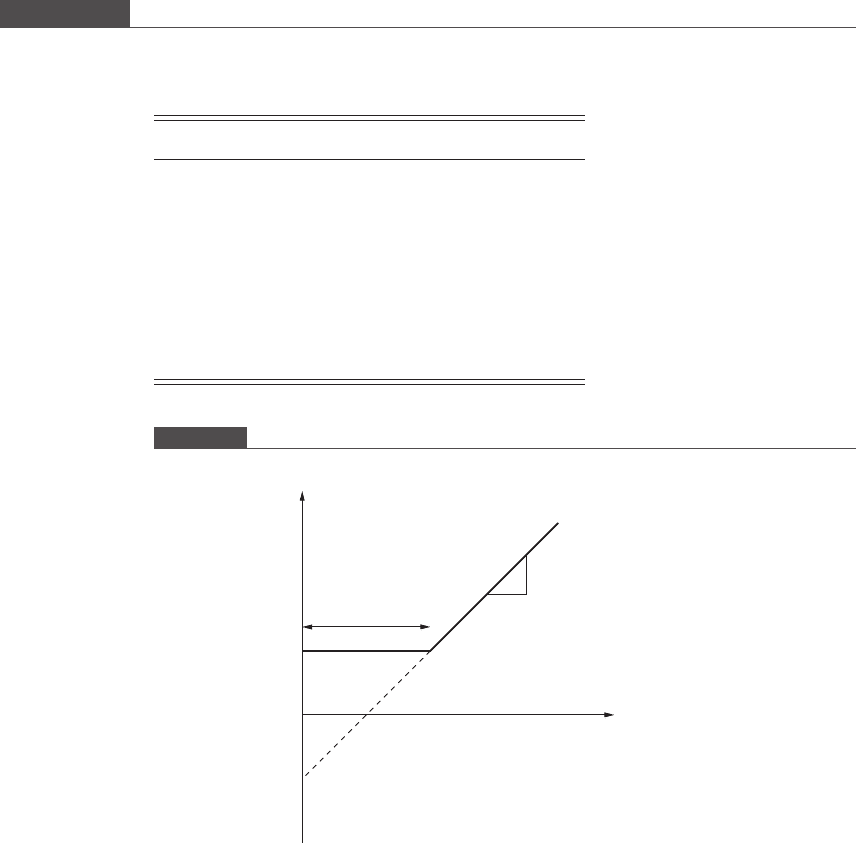
Table P8.2 provides an example of such a data set, which exhibits some random error
inherent in experimental measurements.
If you plot the data in Table 8.3 you will see that the pos ition of the cell is relat ively
constant around x =1μm until t 1 s when it begins to move in a linearly time-
dependent fashion. We want to model this data set as a line after the (unknown) time
delay. Thus, our theoretical curve is a piecewise linear function (see Figure P8.1).
To regress our data correctly to such a model we must use nonlinear regression
techniques. Here’s how it’s done.
(a) Create a function that takes in the three regression parameters (slope,
intercept, t0) as a vector called params, and outputs the sum of the
squared residuals (SSE) between the data and the model. The first two lines of
your function should look like:
function SSE = piecewisefunc(params)
global t x
Table P8.2. Time-dependent position of a leukocyte
in a capillary subjected to a pressure gradient
Time, t(s) Position, x(μm)
0.0 0.981
0.3 1.01
0.6 1.12
0.9 1.13
1.2 2.98
1.5 2.58
1.8 3.10
2.1 5.89
Figure P8.1
Intercept
Slope
× t
0
+ intercept
Slope
t
0
= ?
x
t
0
535
8.7 Problems

Note that we are passing the data to the function as two global variables, so the same
global command should appear at the beginning of your main program. Next,
your function must calculate the SSE (sum of the squared error). Build a for loop
that executes once for each element of t. Inside your for loop, test to see whether
t(i) is greater than t
0
(the time delay). If it is, then the SSE is calculated in the usual
way as:
SSE = SSE + (x(i) – (slope*t(i) + intercept))^2;
If t(i) is lower than t
0
, then the SSE is defined as the squared difference
between the data and the constant value of the model before t
0
. This looks like:
SSE = SSE + (x(i) – (slope*t0 + intercept))^2;
where slope*t0 + intercept is just the constant value of x before the linear
regime of behavior. Remember to initialize SSE at zero before the for loop.
(b) In your main program, you must enter the data, and declare the data as global so
that your function can access these values. Then, you may use the fminsearch
function to perform the nonlinear regression and determ ine the optimum values
of the params vector. This is accomplished with the statement:
paramsopt = fminsearch(‘piecewisefunc’, ...
[slopeguess,interceptguess,t0guess])
Note that to obtain the correct solution we must feed a good initial guess to the
program. You can come up with suitable guesses by looking at your plot of the data.
(c) In your main program, output the optimum parameter values to the Command
Window. Also, prepare a plot comparing the data and best-fit model.
8.4. Optimizing drug dosage A patient is being treated for a certain disease simulta-
neously with two different drugs: x units of the first drug and y units of the second
drug are administered to the patient. The body’s response R to the drugs is measured
and is modeled as a function of x and y as
fx; yðÞ¼x
3
y 15 x yðÞ:
Find the values of x and y that maximize R using the method of steepest ascent. Since
you are maximizing an objective function, you will want solve the one-dimensional
problem given by
max
α
f x
0
þ αrf x
0
ðÞðÞ
to yield the iterative algorithm
x
ðkþ1Þ
¼ x
ðkÞ
þ α
opt
rf x
ðkÞ
:
Carry out the line search (i.e. find α
opt
) using successive parabolic interpolation. To
maximize fðx; yÞ, at each iteration you will need to minimize
h αðÞ¼f x
ðkÞ
þ αrf x
ðkÞ
:
Use an initial guess of x
0
=(x
0
, y
0
) = (8, 2).
(a) To ensure that the minimization is successful, you will need to choose the
maximum allowable value of the step size α carefully. When the magnitude of
the gradient is large, even a small step size can move the solution very far from
the original starting point. To find an acceptable interval for α, compute h αðÞfor
536
Nonlinear model regression and optimization