King M.R., Mody N.A. Numerical and Statistical Methods for Bioengineering: Applications in MATLAB
Подождите немного. Документ загружается.

industrial design, traffic control, meteorology, and econ omics. In this chapter,
several well-established classical optimization tools are presented; however, our
discussion only scratches the surface of the body of optimization literature currently
available. We first address the topic of unconstrained optimization of one variable in
Section 8.2. We demonstrate three classic methods used in one-dimensional mini-
mization: (1) Newton’s method (see Section 5.5 for a demonstration of its use as a
nonlinear root-finding method), (2) successive parabolic interpolation method, and
(3) the golden section search method. The minimization problem becomes more
challenging when we need to optimize over more than one variable. Simply using a
trial-and-error method for multivariable optimization problems is discouraged due
to its inefficiency. Section 8.3 discusses popular methods used to perform uncon-
strained optimization in several dimensions. We discuss the topic of constrained
optimization in Section 8.4. Finally, in Section 8.5 we demonstrate Monte Carlo
techniques that are used in practice to estimate the standard error in the estimat es of
the model parameters.
8.2 Unconstrained single-variable optimization
The behavior of a nonlinear function in one variable and the location of its extreme
points can be studied by plotting the function. Consider any smooth function f in a
single variable x that is twice differentiable on the interval ½a; b.Iff
0
xðÞ
4
0 over any
interval x 2½a; b, then the single-variable function is increasing on that interval.
Similarly, when f
0
xðÞ
5
0 over any interval of x, then the single-variable function is
decreasing on that interval. On the other hand, if there lies a point x* in the interval
½a; b such that f
0
x
ðÞ¼0, the function is neither increasing nor decreasing at that
point.
In calculus courses you have learned that an extreme point of a continuous and
smooth function fðxÞ can be found by taking the derivative of fðxÞ, equating it to
zero, and solving for x. One or more solutions of x that satisfy f
0
xðÞ¼0 may exist.
The points x* at which f
0
ðxÞ equals zero are called critical points or stationary points.
At a critical point x*, the function is parallel with the x-axis. Three possibilities arise
regarding the nature of the critical point x*:
(1) if f
0
x
ðÞ¼0; f
00
x
ðÞ
4
0, the point is a local minimum;
(2) if f
0
x
ðÞ¼0; f
00
x
ðÞ
5
0, the point is a local maximum;
(3) if f
0
x
ðÞ¼0; f
00
x
ðÞ¼0, the point may be either an inflection point or an extreme
point. As such, this test is inconclusive. The values of highe r derivatives
f
000
xðÞ; ...; f
k1
xðÞ; f
k
xðÞare needed to define this point. If f
k
xðÞis the first non-
zero kth derivative, then if k is even, the point is an extremum (minimum if f
k
xðÞ
4
0;
maximum if f
k
xðÞ
5
0), and if k is odd, the critical point is an inflection point.
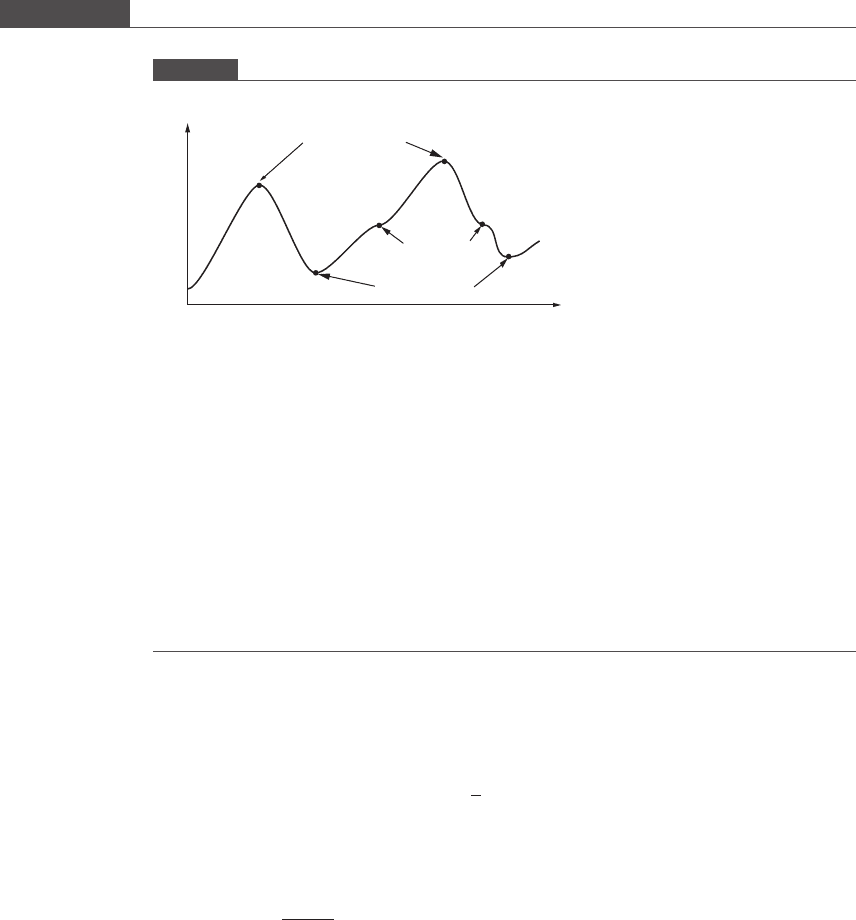
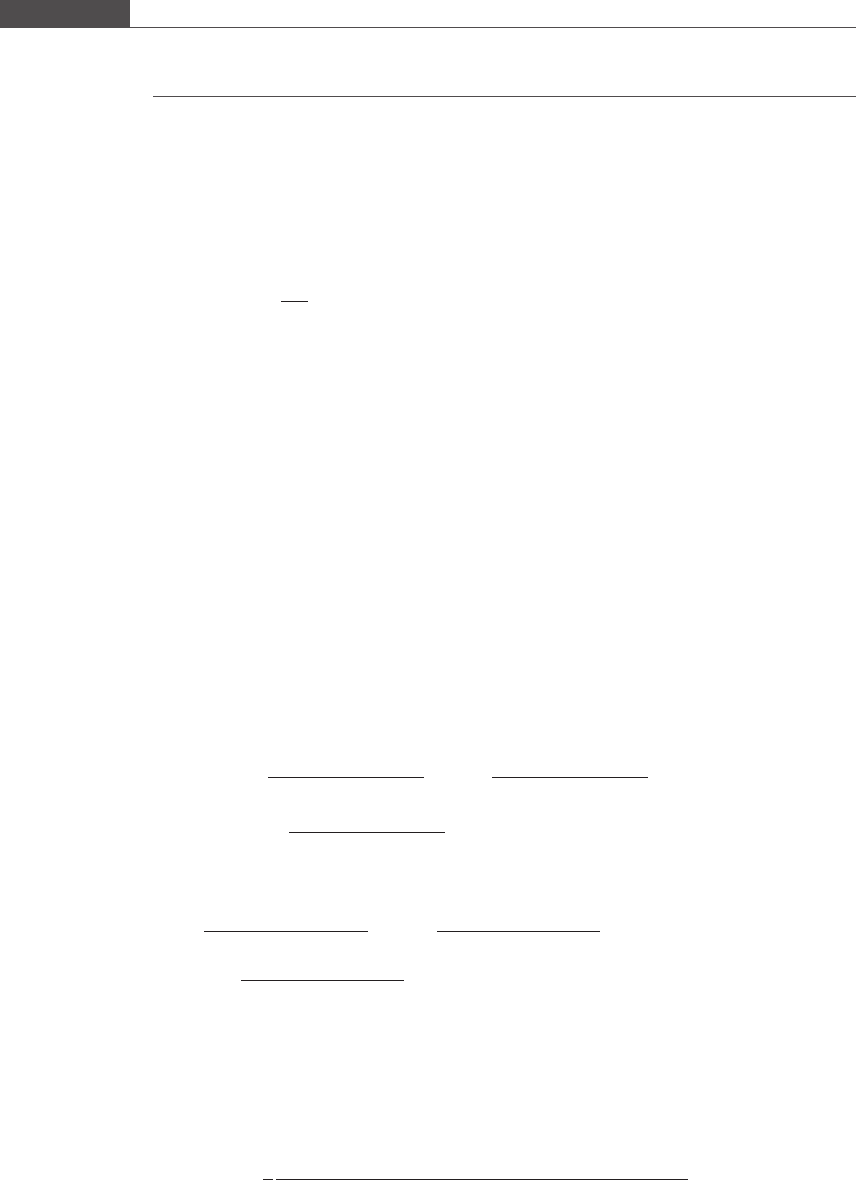
The method of establishing the nature of an extreme point by calculating the value
of the second derivative is called the second derivative test. Figure 8.3 graphic ally
illustrates the different types of critical points that can be exhibited by a nonlinear
function.
To find the local minima of a function, one can solve for the zeros of f
0
ðxÞ, which
are the critical points of fðxÞ. Using the second derivative test (or by plotting the
function), one can then establish the character of the critical point. If f
0
xðÞ¼0isa
nonlinear equation whose solution is difficult to obtain analytically, root-finding
methods such as those described in Chapter 5 can be used to solve iteratively for the
487
8.2 Unconstrained single-variable optimization
roots of the equation f
0
xðÞ¼0. We show how Newton’s root-finding method is used
to find the local minimum of a single-variable function in Section 8.2.1.In
Section 8.2.2 we present another calculus-based method to find the local minimum
called the polynomial approximation method. In this method the function is
approximated by a quadratic or a cubic function. The derivative of the polynomial
is equated to zero to obt ain the value of the next guess. Section 8.2.3 discusses a non-
calculus-based method that uses a bracketing technique to search for the minimum.
All of these methods assume that the function is unimodal.
8.2.1 Newton’s method
Newton’s method of one-dimensional minimization is similar to Newton’s nonlinear
root-finding method discussed in Section 5.5. The unimodal function fðxÞis approxi-
mated by a quadratic equation, which is obtained by truncating the Taylor series
after the third term. Expanding the function about a point x
0
,
fxðÞfx
0
ðÞþf
0
x
0
ðÞx x
0
ðÞþ
1
2
f
00
x
0
ðÞx x
0
ðÞ
2
:
At the extreme point x*, the first derivative of the function must equal zero. Taking
the derivative of the expression above with respect to x, the expression reduces to
x ¼ x
0
f
0
x
0
ðÞ
f
00
x
0
ðÞ
: (8:1)
If you compare Equation (8.1) to Equation (5.19), you will notice that the
structure of the equation (and hence the iterative algorithm) is exactly the same,
except that, for the minimization problem, both the first and second derivative need
to be calculated at each iteration. An advantage of this method over other one-
dimensional optimization methods is its fast second-order convergence, when con-
vergence is guaranteed. However, the initial guessed values must lie close to the
minimum to avoid divergence of the solution (see Section 5.5 for a discussion on
convergence issues of Newton’s method). To ensure that the iterative technique is
converging, it is recommended to check at each step that the cond ition fx
iþ1
ðÞ
5
fðx
i
Þ
is satisfied. If not, modify the initial guess and check again if the solut ion is
progressing in the desired direction.
Some difficul ties encountered when using this method are as follows.
Figure 8.3
Different types of critical points
Local maxima
Local minima
Inflection
points
x
f (x)
488
Nonlinear model regression and optimization
(1) This method is unusable if the function is not smooth and continuous, i.e. the
function is not differentiable at or near the minimum.
(2) A derivative may be too complicated or not in a form suitable for evaluation.
(3) If f
00
xðÞat the critical point is equal to zero, this method will not exhibit second-order
convergence (see Section 5.5 for an explanation).
Box 8.2A Optimization of a fermentation process: maximization of profit
A first-order irreversible reaction A → B with rate constant k takes place in a well-stirred fermentor tank
of volume V. The process is at steady state, such that none of the reaction variables vary with time. W
B
is
the amount of product B in kg produced per year, and p is the price of B per kg. The total annual sales is
given by $ pW
B
.
The mass flowrate of broth through the processing system per year is denoted by W
in
.IfQ is the
flowrate (m
3
/hr) of broth through the system, ρ is the broth density, and the number of hours of operation
annually is 8000, then W
in
¼ 8000ρQ. The annualized capital (investment) cost of the reactor and the
downstream recovery equipment is $4000W
0:6
in
.
The operating cost c is $15.00 per kg of B produced. If the concentration of B in the exiting broth is
b
out
in molar units, then we have W
B
¼ 8000Qb
out
MW
B
.
A steady state material balance incorporating first-order reaction kinetics gives us
b
out
¼ a
in
1
1
1 þ kV=Q
;
where V is the volume of the fermentor and a
in
is the inlet concentration of the reactant. Note that as Q
increases, the conversion will decrease.
The profit function is given by
ðp cÞW
B
4000 W
in
ðÞ
0:6
;
and in terms of the unknown variable Q, it is as follows:
fQ
ðÞ
¼ 8000 p c
ðÞ
MW
B
Qa
in
1
1
1 þðkV=QÞ
4000 8000ρQ
ðÞ
0:6
: (8:2)
Initially, as Q increases the product output will increase and profits will increase. With subsequent
increases in Q, the reduced conversion will adversely impact the product generation rate while
annualized capital costs continue to increase.
You are given the following values:
p = $400 per kg of product,
ρ = 2.5 kg/m
3
,
a
in
=10μM(1M≡ 1 kmol/m
3
),
k = 2/hr,
V =12m
3
,
MW
B
= 70 000 kg/kmol.
Determine the value of Q that maximizes the profit function. This problem was inspired by a
discussion on reactor optimization in Chapter 6 of Nauman (2002).
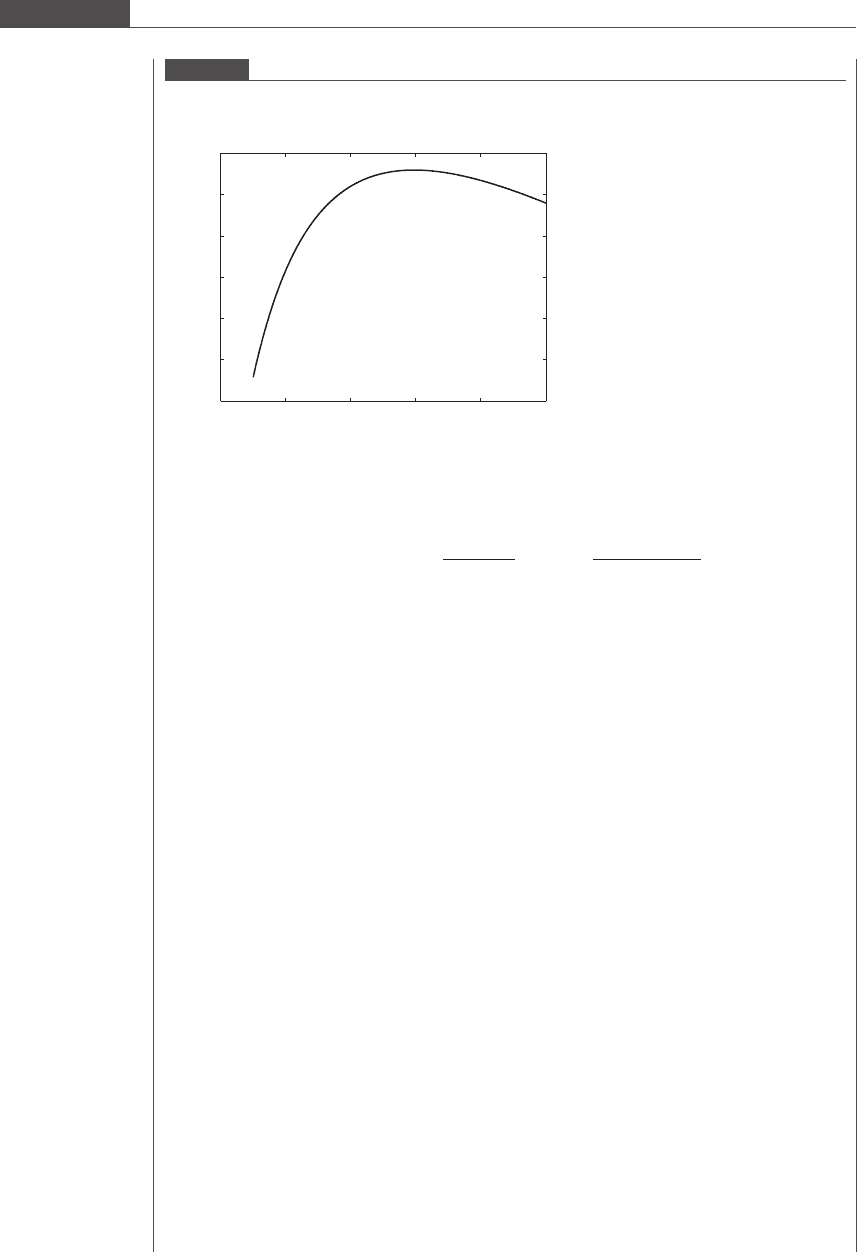
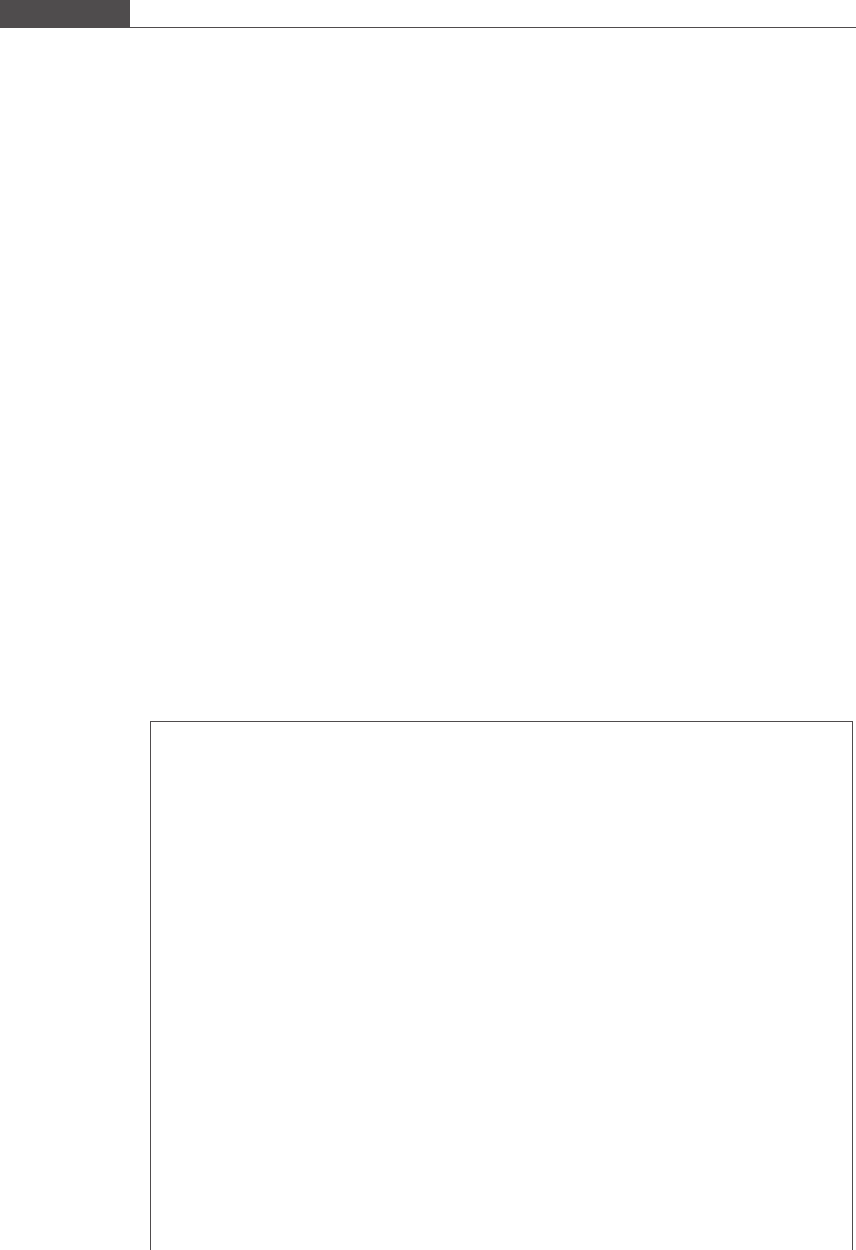
We plot the profit as a function of the hourly flowrate Q in Figure 8.4. We can visually identify an
interval Q 2½50; 70 that contains the maximum value of the objective function.
The derivative of the objective function is as follows:
f
0
QðÞ¼8000 p cðÞMW
B
a
in
1
1
1 þðkV=QÞ
QkV
Q þ kVðÞ
2
"#
0:6
4000 8000ρðÞ
0:6
Q
0:4
:
489
8.2 Unconstrained single-variable optimization
The second derivative of the objective function is as follows:
f
00
QðÞ¼8000 p cðÞMW
B
a
in
2 kVðÞ
2
Q þkVðÞ
3
"#
þ 0:24
4000 8000ρðÞ
0:6
Q
1:4
:
Two functions are written to carry out the maximization of the profit function. The first function listed
in Program 8.1 performs a one-dimensional Newton optimization, and is similar to Program 5.7.
Program 8.2 calculates the first and second derivative of the profit function.
MATLAB program 8.1
function newtons1Doptimization(func, x0, tolx)
% Newton’s method is used to minimize an objective function of a single
% variable
% Input variables
% func : first and second derivative of nonlinear function
% x0 : initial guessed value
% tolx : tolerance in estimating the minimum
% Other variables
maxloops = 20;
[df, ddf] = feval(func,x0);
fprintf(‘ i x(i) f’’(x(i)) f’’’’(x(i)) \n’); %\n is carriage return
% Minimization scheme
for i = 1:maxloops
x1 = x0 - df/ddf;
[df, ddf] = feval(func,x1);
fprintf(‘%2d %7.6f %7.6f %7.6f \n’,i,x1,df,ddf);
if (abs(x1 - x0) <= tolx)
break
Figure 8.4
Profit function
0 20 40 60 80 100
0.8
1
1.2
1.4
1.6
1.8
2
× 10
7
Q (m
3
/hr)
Annual profit (US dollars)
490
Nonlinear model regression and optimization

The termination criterion in Box 8.2A consisted of specifying a tolerance value for
the absolute difference in the solution of two consecutive iterations. Other stopping
criteria may be specified either individually or simultaneously.
(1) f
0
xðÞ
jj
5
E . A cut-off value close to zero can be specified. If this criterion is met, it
indicates that f
0
ðxÞ is close enough to zero such that an extreme point has been
reached. This criterion can be used only with a minimization algorithm that calcu-
lates the derivative of the function.
(2)
fx
iþ1
ðÞfx
i
ðÞ
fx
iþ1
ðÞ
5
E. If the function value is changing very slowly, this can signify that a
critical point has been found.
(3)
x
iþ1
x
i
x
iþ1
5
E. The relative change in the solution can be used to determine when the
iterations can be stopped.
end
x0 = x1;
end
MATLAB program 8.2
function [df ddf] = flowrateoptimization(Q)
% Calculates the first and second derivatives of the profit function
ain = 10e-6; % feed concentration of A (kmol/m^3)
p = 400; % price in US dollars per kg of product
c = 15; % operating cost per kg of product
k = 2; % forward rate constant (1/hr)
V = 12; % fermentor volume (m^3)
rho = 2.5; % density (kg/m^3)
MWB = 70000; % molecular weight (kg/kmol)
df = 8000*(p - c)*ain*MWB*(1 - 1/(1 + k*V/Q) - Q*k*V/(Q + k*V)^2) - ...
0.6*4000*(8000*rho)^0.6/(Q^0.4);
ddf = 8000*(p - c)*ain*MWB*(-2*(k*V)^2/(Q + k*V)^3) + ...
0.24*4000* (8000*rho)^0.6/(Q^1.4);
The optimization function is executed from the command line as follows:
44
newtons1Doptimization(‘flowrateoptimization’, 50, 0.01)
i x(i) f’(x(i)) f’’(x(i))
1 57.757884 5407.076741 −3295.569935
2 59.398595 178.749716 −3080.622008
3 59.456619 0.211420 −3073.338162
4 59.456687 0.000000 −3073.329539
The optimum flowrate that maximizes the profit is Q = 59.46 m
3
/hr. The second derivative is negative,
which tells us that the critical point is a maximum. To use Newton’s optimization method we did not
need to convert the maximization problem to a minimization problem because the method searches for
an extreme point and does not formally distinguish between a minimum point and a maximum point.
In this problem, we did not specify any constraints on the value of Q. In reality, the flowrate will have
some upper limit that is dictated by the size of installed piping, frictional losses in the piping, pump
capacity, and other constraints.
491
8.2 Unconstrained single-variable optimization
8.2.2 Successive parabolic interpolation
In the successive parabolic interpolation method, a unimodal function is approxi-
mated over an interval x
0
; x
2
½that brackets the minimum by a parabolic function
pxðÞ¼c
2
x
2
þ c
1
x þ c
0
. Any three values of the independent variable, x
0
< x
1
< x
2
,
not necessarily equally spaced in the interval, are selected to construct the unique
parabola that passes through these three points. The minimum point of the parabola
is located at p
0
xðÞ¼0. Taking the derivative of the second-degree polynomial
expression and equating it to zero, we obtain
x
min
¼
c
1
2c
2
: (8:3)
The minimum given by Equation (8.3) will most likely not coincide with the mini-
mum x* of the objective function (unless the function is also parabolic); x
min
will lie
either between x
0
and x
1
or between x
1
and x
2
.Wecalculatefx
min
ðÞand compare this
with the function values at the three other points. The point x
min
andtwooutofthethree
original points are chosen to form a new set of three points used to construct the next
parabola. The selection is made such that the minimum value of fðxÞ is bracketed by the
endpoints of the new interval. For example, if x
min
> x
1
(x
min
lies between x
1
and x
2
)
and fx
min
ðÞ
5
fx
1
ðÞ, then we would choose the three points x
1
, x
min
,andx
2
. On the other
hand, if fx
min
ðÞ
4
fx
1
ðÞand x
min
> x
1
, then we would choose the points x
0
, x
1
,andx
min
.
The new set of three points provides the next parabolic approximation of the function
near or at the minimum. In this manner, each newly constructed parabola is defined
over an interval that always contains the minimum value of the function. The interval on
which the parabolic interpolation is definedshrinksinsizewitheachiteration.
To calculate x
min
, we must express c
1
and c
2
in Equation (8.3) in terms of the three
points x
0
, x
1
, and x
2
and their function values. We use the second-order Lagrange
interpolation formula given by Equation (6.14) (reproduced below) to construct a
second-degree polynomial approximation to the function:
pxðÞ¼
x x
1
ðÞx x
2
ðÞ
x
0
x
1
ðÞx
0
x
2
ðÞ
fx
0
ðÞþ
x x
0
ðÞx x
2
ðÞ
x
1
x
0
ðÞx
1
x
2
ðÞ
fx
1
ðÞ
þ
x x
0
ðÞx x
1
ðÞ
x
2
x
0
ðÞx
2
x
1
ðÞ
fx
2
ðÞ:
Differentiating the above expression and equating it to zero, we obtain
x x
1
ðÞþx x
2
ðÞ
x
0
x
1
ðÞx
0
x
2
ðÞ
fx
0
ðÞþ
x x
0
ðÞþx x
2
ðÞ
x
1
x
0
ðÞx
1
x
2
ðÞ
fx
1
ðÞ
þ
x x
0
ðÞþx x
1
ðÞ
x
2
x
0
ðÞx
2
x
1
ðÞ
fx
2
ðÞ¼0
Applying a common denominator to each term, the equation reduces to
2x x
1
x
2
ðÞx
2
x
1
ðÞfx
0
ðÞ2x x
0
x
2
ðÞx
2
x
0
ðÞfx
1
ðÞ
þ 2x x
0
x
1
ðÞx
1
x
0
ðÞfx
2
ðÞ¼0
Rearranging, we get
x
min
¼
1
2
x
2
2
x
2
1
fx
0
ðÞx
2
2
x
2
0
fx
1
ðÞþx
2
1
x
2
0
fx
2
ðÞ
x
2
x
1
ðÞfx
0
ðÞx
2
x
0
ðÞfx
1
ðÞþx
1
x
0
ðÞfx
2
ðÞ
: (8:4)
We now summarize the algorithm.
492
Nonlinear model regression and optimization
Algorithm for successive parabolic approximation
(1) Establish an inter val within which a minimum point of the unimodal function lies.
(2) Select the two endpoints x
0
and x
2
of the interval and one other point x
1
in the
interior to form a set of three points used to construct a parabolic approximation of
the function.
(3) Evaluate the function at these three points.
(4) Calculate the minimum value of the parabola x
min
using Equation (8.4).
(5) Select three out of the four points such that the new interval brackets the minimum
of the unimodal function.
(a) If x
min
5
x
1
then
(i) if fx
min
ðÞ
5
fx
1
ðÞchoose x
0
, x
min
, x
1
;
(ii) if fx
min
ðÞ
4
fx
1
ðÞ
choose x
min
, x
1
, x
2
.
(b) If x
min
4
x
1
then
(i) if fx
min
ðÞ
5
fx
1
ðÞchoose x
1
, x
min
, x
2
;
(ii) if fx
min
ðÞ
4
fx
1
ðÞchoose x
0
, x
1
, x
min
.
(6) Repeat steps (4) and (5) until the interval size is less than the tolerance specification.
Note that only function evaluations (but not derivative evaluations) are required,
making the parabolic interpolation useful for functions that are difficult to differ-
entiate. A cubic approximation of the function may or may not require evaluation of
the function derivative at each iteration depending on the chosen algorithm. A
discussion of the non-derivative-based cubic approximation method can be found
in Rao (2002). The convergence rate of the successive pa rabolic interpolation
method is superlinear and is intermediate to that of Newton’s method discussed in
the previous section and of the golden section search method to be discussed in
Section 8.2.3.
Box 8.2B Optimization of a fermentation process: maximization of profit
We solve the optimization problem discussed in Box 8.2A using the method of successive parabolic
interpolation. MATLAB program 8.3 is a function m-file that minimizes a unimodal single-variable
function using the method of parabolic interpolation. MATLAB program 8.4 calculates the negative of
the profit function (Equation (8.2)).
MATLAB program 8.3
function parabolicinterpolation(func, ab, tolx)
% The successive parabolic interpolation method is used to find the
% minimum of a unimodal function.
% Input variables
% func: nonlinear function to be minimized
% ab : bracketing interval [a, b]
% tolx: tolerance in estimating the minimum
% Other variables
k = 0; % counter
% Set of three points to construct the parabola
x0 = ab(1);
493
8.2 Unconstrained single-variable optimization

x2 = ab(2);
x1 = (x0 + x2)/2;
% Function values at the three points
fx0 = feval(func, x0);
fx1 = feval(func, x1);
fx2 = feval(func, x2);
% Iterative solution
while (x2 - x0) > tolx % (x2 – x0) is always positive
% Calculate minimum point of parabola
numerator = (x2^2 - x1^2)*fx0 - (x2^2 - x0^2)*fx1 + ...
(x1^2 - x0^2) *fx2;
denominator = 2*((x2 - x1)*fx0 - (x2 - x0)*fx1 + (x1 - x0)*fx2);
xmin = numerator/denominator;
% Function value at xmin
fxmin = feval(func, xmin);
% Select the next set of three points to construct new parabola
if xmin < x1
if fxmin < fx1
x2 = x1;
fx2 = fx1;
x1 = xmin;
fx1 = fxmin;
else
x0 = xmin;
fx0 = fxmin;
end
else
if fxmin < fx1
x0 = x1;
fx0 = fx1;
x1 = xmin;
fx1 = fxmin;
else
x2 = xmin;
fx2 = fxmin;
end
end
k=k+1;
end
fprintf(‘x0 = %7.6f x2 = %7.6f f(x0) = %7.6f f(x2) = %7.6f \n’, ...
x0, x2, fx0, fx2)
fprintf(‘x_min = %7.6f f(x_min) = %7.6f \n’,xmin, fxmin)
fprintf(‘number of iterations = %2d \n’,k)
MATLAB program 8.4
function f = profitfunction(Q)
% Calculates the objective function to be minimized
494
Nonlinear model regression and optimization

8.2.3 Golden section search method
Bracketing methods for performing minimization are analogous to the bisection
method for nonlinear root finding. Bracketing methods search for the solution by
retaining only a fraction of the interval at each iteration, after ensuring that the
selected subinterval contains the solution. A bracketing method that searches for an
extreme point must calculate the function value at two different points in the interior
of the interval, while the bisection method and regula-falsi method analyze only one
interior point at each iteration. An important assumption of any bracketing method
of minimization is that a unique minimum point is located within the interval, i.e. the
function is unimodal. If the function has multiple minima located within the interval,
this method may fail to find the minimum.
First, an interval that contains the minimum x* of the unimodal function must be
selected. Then
f
0
xðÞ¼
5
0 x
5
x
4
0 x
4
x
;
for all x that lie in the interval. If a and b are the endpoints of the interval, then the
function value at any point x
1
in the interior will necessarily be smaller than at least
one of the function values at the endpoints, i.e.
fx
1
ðÞ
5
max faðÞ; fðbÞðÞ:
Within the interval ½a; b, two points x
1
< x
2
are selected according to a formula that
is dependen t upon the bracketing search method chosen.
The function is evaluated at the endpoints of the interval as well as at these two
interior points. This is illustrated in Figure 8.5.If
fx
1
ðÞ
4
fx
2
ðÞ
then the minimum must lie either in the interval x
1
; x
2
½or in the interval x
2
; b½.
Therefore, we select the subinterval ½x
1
; b for further consideration and discard the
subinterval a; x
1
½. On the other hand if
fx
1
ðÞ
5
fx
2
ðÞ
ain = 10e-6; % feed concentration of A (kmol/m^3)
p = 400; % price in US dollars per kg of product
c = 15; % operating cost per kg of product
k = 2; % forward rate constant (1/hr)
V = 12; % fermentor volume (m^3)
rho = 2.5; % density (kg/m^3)
MWB = 70000; % molecular weight (kg/kmol)
f = -((p - c)*Q*ain*MWB*(1 - 1/(1 + k*V/Q))*8000 - ...
4000* (8000*rho*Q)^0.6);
We call the optimization function from the command line:
44
parabolicinterpolation(‘profitfunction’, [50 70], 0.01)
x0 = 59.456686 x2 = 59.456692 f(x0) = -19195305.998460 f(x2) =
-19195305.998460
x_min = 59.456686 f(x_min) = -19195305.998460
number of iterations = 12
495
8.2 Unconstrained single-variable optimization
then the minimum must lie either in the interval a; x
1
½or in the interval x
1
; x
2
½.
Therefore, we select the subinterval ½a; x
2
and discard the subinterval x
2
; b½.
An efficient bracketing search method that requires the calculation of only one new
interior point (and therefore only one function evaluation) at each iterative step is the
golden section search method. This method is based on dividing the interval into
segments using the golden ratio. Any line that is divided into two parts according to
the golden ratio is called a golden section. The golden ratio is a special number that
divides a line into two segments such that the ratio of the line width to the width of the
larger segment is equal to the ratio of the larger segment to the smaller segment width.
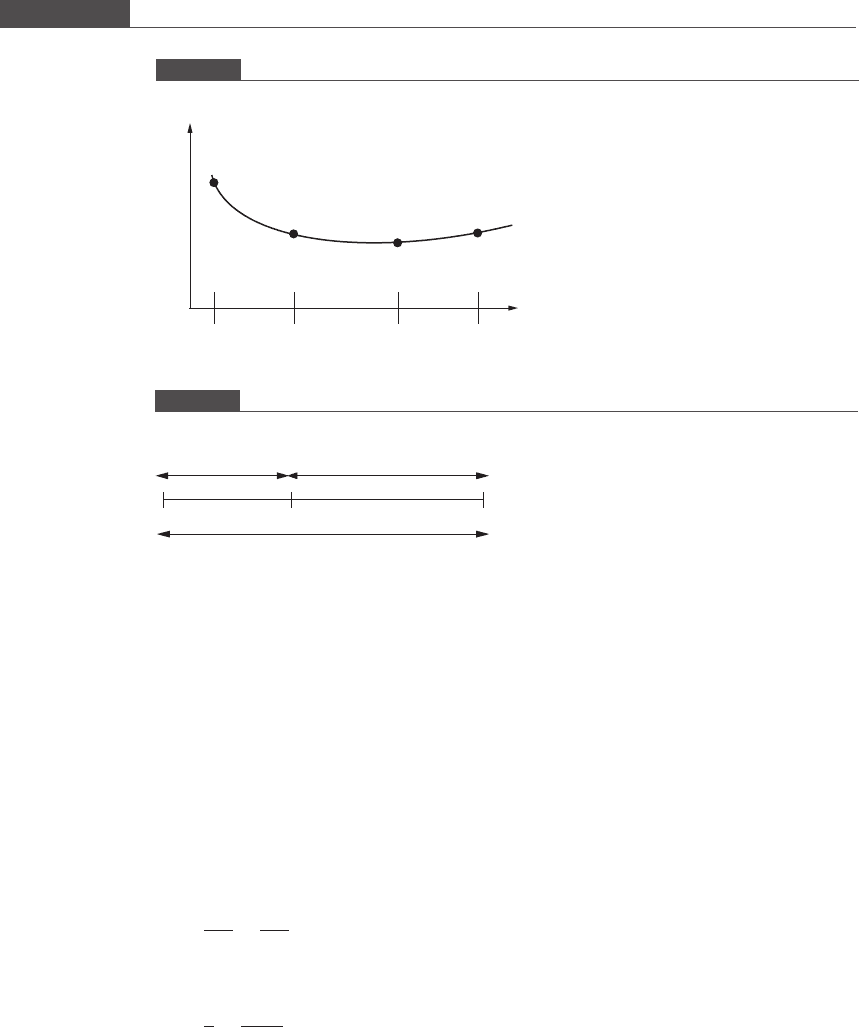
In Figure 8.6, the point x
1
divides the line into two segments. If the width of the
line is equal to unity and the width of the larger segment x
1
b = r, then the width of
the smaller segment ax
1
=1–r. If the division of the line is made according to the
following rule:
ab
x
1
b
¼
x
1
b
ax
1
or
1
r
¼
r
1 r
(8:5)
then the line ab is a golden section and the golden ratio is given by 1=r.
Solving the quadratic equation r
2
þ r 1 ¼ 0(Equation (8.5)), we arrive at
r ¼ð
ffiffiffi
5
p
1Þ=2orr ¼ 0:618034, and 1 r ¼ 0:381966. The golden ratio is given
by the inverse of r, and is equal to the irrational number ð
ffiffiffi
5
p
þ 1Þ=2 ¼ 1:618034. The
golden ratio is a special number and was known to be investigated by ancient Greek
mathematicians such as Euclid and Pythagoras. Its use has been found in architec-
tural design and artistic works. It is also arises in na tural patterns such as the spiral
of a seashell.
Figure 8.5
Choosing a subinterval for a one-dimensional bracketing search method
a
b
x
1
x
2
x
f (x)
Figure 8.6
Dividing a line by the golden ratio
a
b
x
1
1 – r
r
1
496
Nonlinear model regression and optimization