Hirsch M., Smale S., Devaney R., Differential Equations, Dynamical Systems, and an Introduction to Chaos
Подождите немного. Документ загружается.


196 Chapter 9 Global Nonlinear Techniques
For stability, we want
˙
L ≤ 0; this can be arranged, for example, by setting
a = 1, b = 2, and c = 1. If = 0, we then have
˙
L =−z
4
≤ 0, so the origin
is stable. It can be shown (see Exercise 4) that the origin is not asymptotically
stable in this case.
If < 0, then we find
˙
L = (x
2
+ 2y
2
)(z + 1) − z
4
so that
˙
L<0 in the region O given by z>−1 (minus the origin). We conclude
that the origin is asymptotically stable in this case, and, indeed, from Exercise 4,
that all solutions that start in the region
O tend to the origin.
Example. (The Nonlinear Pendulum) Consider a pendulum consisting
of a light rod of length to which is attached a ball of mass m. The other end
of the rod is attached to a wall at a point so that the ball of the pendulum
moves on a circle centered at this point. The position of the mass at time t
is completely described by the angle θ(t ) of the mass from the straight down
position and measured in the counterclockwise direction. Thus the position
of the mass at time t is given by ( sin θ(t ), − cos θ(t )).
The speed of the mass is the length of the velocity vector, which is dθ/dt ,
and the acceleration is d
2
θ/dt
2
. We assume that the only two forces acting
on the pendulum are the force of gravity and a force due to friction. The
gravitational force is a constant force equal to mg acting in the downward
direction; the component of this force tangent to the circle of motion is given
by −mg sin θ . We take the force due to friction to be proportional to velocity
and so this force is given by −b dθ/dt for some constant b>0. When there
is no force due to friction (b = 0), we have an ideal pendulum. Newton’s law
then gives the second-order differential equation for the pendulum
m
d
2
θ
dt
2
=−b
dθ
dt
− mg sin θ.
For simplicity, we assume that units have been chosen so that m = = g = 1.
Rewriting this equation as a system, we introduce v = dθ/dt and get
θ
= v
v
=−bv − sin θ.
Clearly, we have two equilibrium points (mod 2π ): the downward rest position
at θ = 0, v = 0, and the straight-up position θ = π, v = 0. This upward
postion is an unstable equilibrium, both from a mathematical (check the
linearization) and physical point of view.
9.2 Stability of Equilibria 197
For the downward equilibrium point, the linearized system is
Y
=
01
−1 −b
Y .
The eigenvalues here are either pure imaginary (when b = 0) or else have neg-
ative real parts (when b>0). So the downward equilibrium is asymptotically
stable if b>0 as everyone on earth who has watched a real-life pendulum
knows.
To investigate this equilibrium point further, consider the function
E(θ , v) =
1
2
v
2
+ 1 − cos θ. For readers with a background in elementary
mechanics, this is the well-known total energy function, which we will describe
further in Chapter 13. We compute
˙
E = vv
+ sin θθ
=−bv
2
,
so that
˙
E ≤ 0. Hence E is a Liapunov function. Thus the origin is a stable
equilibrium. If b = 0 (that is, there is no friction), then
˙
E ≡ 0. That is, E is
constant along all solutions of the system. Hence we may simply plot the level
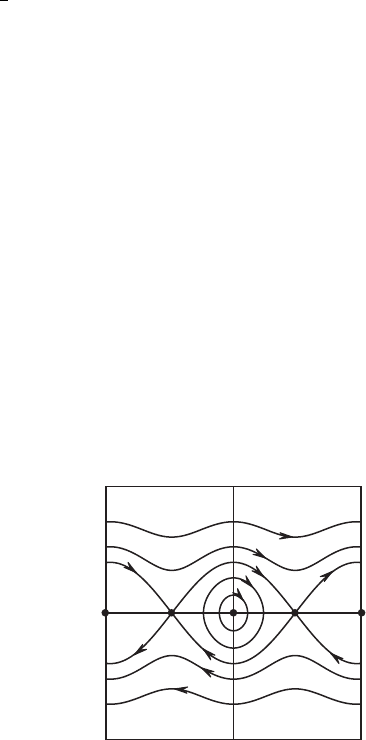
curves of E to see where the solution curves reside. We find the phase portrait
shown in Figure 9.6. Note that we do not have to solve the differential equation
to paint this picture; knowing the level curves of E (and the direction of the
vector field) tells us everything. We will encounter many such (very special)
functions that are constant along solution curves later in this chapter.
The solutions encircling the origin have the property that −π < θ (t) < π
for all t . Therefore these solutions correspond to the pendulum oscillating
about the downward rest position without ever crossing the upward position
θ = π . The special solutions connecting the equilibrium points at (±π ,0)
2π⫺2π
Figure 9.6 The phase portrait for the
ideal pendulum.
198 Chapter 9 Global Nonlinear Techniques
correspond to the pendulum tending to the upward-pointing equilibrium in
both the forward and backward time directions. (You don’t often see such
motions!) Beyond these special solutions we find solutions for which θ (t)
either increases or decreases for all time; in these cases the pendulum spins
forever in the counterclockwise or clockwise direction.
We will return to the pendulum example for the case b>0 later, but first
we prove Liapunov’s theorem.
Proof: Let δ > 0 be so small that the closed ball B
δ
(X
∗
) around the equilib-
rium point X
∗
of radius δ lies entirely in O. Let α be the minimum value of
L on the boundary of B
δ
(X
∗
), that is, on the sphere S
δ
(X
∗
) of radius δ and
center X
∗
. Then α > 0 by assumption. Let U ={X ∈ B
δ
(X
∗
) | L(X ) < α}
and note that X
∗
lies in U. Then no solution starting in U can meet S
δ
(X
∗
)
since L is nonincreasing on solution curves. Hence every solution starting
in
U never leaves B
δ
(X
∗
). This proves that X
∗
is stable.
Now suppose that assumption (c) in the Liapunov stability theorem holds
as well, so that L is strictly decreasing on solutions in
U − X
∗
. Let X (t )be
a solution starting in
U − X
∗
and suppose that X (t
n
) → Z
0
∈ B
δ
(X
∗
) for
some sequence t
n
→∞. We claim that Z
0
= X
∗
. To see this, observe that
L(X (t )) >L(Z
0
) for all t ≥ 0 since L(X (t)) decreases and L(X (t
n
)) → L(Z
0
)
by continuity of L.IfZ
0
= X
∗
, let Z (t ) be the solution starting at Z
0
. For
any s>0, we have L(Z (s)) <L(Z
0
). Hence for any solution Y (s) starting
sufficiently near Z
0
we have
L(Y (s)) <L
(
Z
0
)
.
Setting Y (0) = X(t
n
) for sufficiently large n yields the contradiction
L(X
(
t
n
+ s
)
) <L
(
Z
0
)
.
Therefore Z
0
= X
∗
. This proves that X
∗
is the only possible limit point of the
set {X (t ) | t ≥ 0} and completes the proof of Liapunov’s theorem.
Figure 9.7 makes the theorem intuitively obvious. The condition
˙
L<0
means that when a solution crosses a “level surface” L
−1
(c), it moves inside
the set where L ≤ c and can never come out again. Unfortunately, it is
sometimes difficult to justify the diagram shown in this figure; why should the
sets L
−1
(c) shrink down to X
∗
? Of course, in many cases, Figure 9.7 is indeed
correct, as, for example, if L is a quadratic function such as ax
2
+ by
2
with
a, b>0. But what if the level surfaces look like those shown in Figure 9.8? It
is hard to imagine such an L that fulfills all the requirements of a Liapunov
function; but rather than trying to rule out that possibility, it is simpler to give
the analytic proof as above.
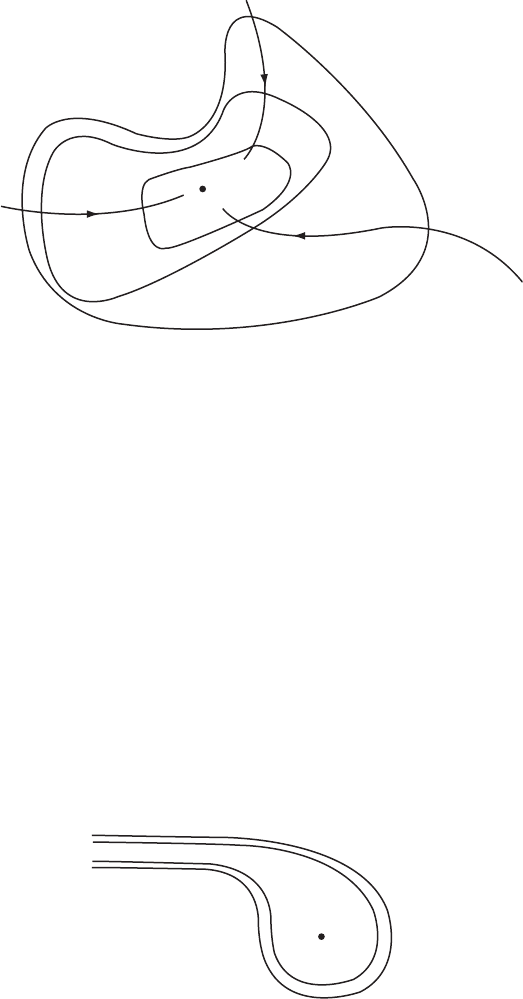
9.2 Stability of Equilibria 199
L
⫺1
(c
2
)
L
⫺1
(c
1
)
L
⫺1
(c
3
)
Figure 9.7 Solutions decrease through the level sets L
−1
(c
j
)
of a strict Liapunov function.
Example. Now consider the system
x
=−x
3
y
=−y(x
2
+ z
2
+ 1)
z
=−sin z.
The origin is again an equilibrium point. It is not the only one, however,
since (0, 0, nπ ) is also an equilibrium point for each n ∈
Z. Hence the origin
cannot be globally asymptotically stable. Moreover, the planes z = nπ for
n ∈
Z are invariant in the sense that any solution that starts on one of these
planes remains there for all time. This occurs since z
= 0 when z = nπ.In
particular, any solution that begins in the region |z| < π must remain trapped
in this region for all time.
L
⫺1
(c
2
)
L
⫺1
(c
1
)
Figure 9.8 Level sets of a Liapunov
function may look like this.
200 Chapter 9 Global Nonlinear Techniques
Linearization at the origin yields the system
Y
=
⎛
⎝
000
0 −10
00−1
⎞
⎠
Y
which tells us nothing about the stability of this equilibrium point.
However, consider the function
L(x, y, z) = x
2
+ y
2
+ z
2
.
Clearly, L>0 except at the origin. We compute
˙
L =−2x
4
− 2y
2
(x
2
+ z
2
+ 1) − 2z sin z.
Then
˙
L<0 at all points in the set |z| < π (except the origin) since z sin z>0
when z = 0. Hence the origin is asymptotically stable.
Moreover, we can conclude that the basin of attraction of the origin is the
entire region |z| < π. From the proof of the Liapunov stability theorem, it
follows immediately that any solution that starts inside a sphere of radius r<π
must tend to the origin. Outside of the sphere of radius π and between the
planes z =±π, the function L is still strictly decreasing. Since solutions are
trapped between these two planes, it follows that they too must tend to the
origin.
Liapunov functions not only detect stable equilibria; they can also be used to
estimate the size of the basin of attraction of an asymptotically stable equilib-
rium, as the above example shows. The following theorem gives a criterion for
asymptotic stability and the size of the basin even when the Liapunov function
is not strict. To state it, we need several definitions.
Recall that a set
P is called invariant if for each X ∈ P, φ
t
(X) is defined
and in
P for all t ∈ R. For example, the region |z| < π in the above example
is an invariant set. The set
P is positively invariant if for each X ∈ P, φ
t
(X)
is defined and in
P for all t ≥ 0. The portion of the region |z| < π inside
a sphere centered at the origin in the previous example is positively invariant
but not invariant. Finally, an entire solution of a system is a set of the form
{
φ
t
(X) | t ∈ R
}
.
Theorem. (Lasalle’s Invariance Principle) Let X
∗
be an equilibrium
point for X
= F(X ) and let L : U → R be a Liapunov function for X
∗
, where
U is an open set containing X
∗
. Let P ⊂ U be a neighborhood of X
∗
that is closed
and bounded. Suppose that
P is positively invariant, and that there is no entire
solution in
P −X
∗
on which L is constant. Then X
∗
is asymptotically stable, and
P is contained in the basin of attraction of X
∗
.

9.2 Stability of Equilibria 201
Before proving this theorem we apply it to the equilibrium X
∗
= (0, 0) of
the damped pendulum discussed previously. Recall that a Liapunov function
is given by E(θ , v) =
1
2
v
2
+ 1 − cos θ and that
˙
E =−bv
2
. Since
˙
E = 0on
v = 0, this Liapunov function is not strict.
To estimate the basin of (0, 0), fix a number c with 0 <c<2, and define
P
c
={(θ, v) | E(θ , v) ≤ c and |θ | < π }.
Clearly, (0, 0) ∈
P
c
. We shall prove that P
c
lies in the basin of attraction of
(0, 0).
Note first that
P
c
is positively invariant. To see this suppose that (θ(t ), v(t ))
is a solution with (θ(0), v(0)) ∈
P
c
. We claim that (θ(t ), v(t )) ∈ P
c
for all
t ≥ 0. We clearly have E(θ (t), v(t)) ≤ c since
˙
E ≤ 0. If |θ(t )|≥π, then there
must exist a smallest t
0
such that θ (t
0
) =±π. But then
E(θ (t
0
), v(t
0
)) = E(±π, v(t
0
))
=
1
2
v(t
0
)
2
+ 2
≥ 2.
However,
E(θ (t
0
), v(t
0
)) ≤ c<2.
This contradiction shows that θ (t
0
) < π , and so P
c
is positively invariant.
We now show that there is no entire solution in
P
c
on which E is constant
(except the equilibrium solution). Suppose there is such a solution. Then,
along that solution,
˙
E ≡ 0 and so v ≡ 0. Hence, θ
= 0soθ is constant on
the solution. We also have v
=−sin θ = 0 on the solution. Since |θ | < π ,it
follows that θ ≡ 0. Thus the only entire solution in
P
c
on which E is constant
is the equilibrium point (0, 0).
Finally,
P
c
is a closed set. Because if (θ
0
, v
0
) is a limit point of P
c
, then |θ
0
|≤
π, and E(θ
0
, v
0
) ≤ c by continuity of E. But |θ
0
|=π implies E(θ
0
, v
0
) >c,
as shown above. Hence |θ
0
| < π and so (θ
0
, v
0
) does belong to P
c
,soP
c
is
closed.
From the theorem we conclude that
P
c
belongs to the basin of attraction of
(0, 0) for each c<2; hence the set
P =∪
{
P
c
| 0 <c<2
}
is also contained in this basin. Note that we may write
P ={(θ, v) | E(θ , v) < 2 and |θ| < π }.
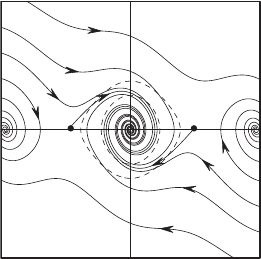
202 Chapter 9 Global Nonlinear Techniques
o
c
c
᎐o
Figure 9.9 The curve γ
c
bounds the region P
c
.
Figure 9.9 displays the phase portrait for the damped pendulum. The curves
marked γ
c
are the level sets E(θ, v) = c. Note that solutions cross each of these
curves exactly once and eventually tend to the origin.
This result is quite natural on physical grounds. For if θ =±π, then
E(θ ,0) < 2 and so the solution through (θ , 0) tends to (0, 0). That is, if
we start the pendulum from rest at any angle θ except the vertical position,
the pendulum will eventually wind down to rest at its stable equilibrium
postion.
There are other initial positions in the basin of (0, 0) that are not in the set
P. For example, consider the solution through (−π, u), where u is very small
but not zero. Then (−π, u) ∈
P, but the solution through this point moves
quickly into
P, and therefore eventually approaches (0, 0). Hence (−π , u) also
lies in the basin of attraction of (0, 0). This can be seen in Figure 9.9, where the
solutions that begin just above the equilibrium point at (−π , 0) and just below
(π, 0) quickly cross γ
c
and then enter P
c
. See Exercise 5 for further examples
of this.
We now prove the theorem.
Proof: Imagine a solution X(t ) that lies in the positively invariant set
P for
0 ≤ t ≤∞, but suppose that X(t ) does not tend to X
∗
as t →∞. Since P
is closed and bounded, there must be a point Z = X
∗
in P and a sequence
t
n
→∞such that
lim
n→∞
X(t
n
) = Z .
We may assume that the sequence {t
n
} is an increasing sequence.
We claim that the entire solution through Z lies in
P. That is, φ
t
(Z)is
defined and in
P for all t ∈ R, not just t ≥ 0. This can be seen as follows.

9.3 Gradient Systems 203
First, φ
t
(Z) is certainly defined for all t ≥ 0 since P is positively invariant. On
the other hand, φ
t
(X(t
n
)) is defined and in P for all t in the interval [−t
n
,0].
Since {t
n
} is an increasing sequence, we have that φ
t
(X(t
n+k
)) is also defined
and in
P for all t ∈[−t
n
,0] and all k ≥ 0. Since the points X (t
n+k
) → Z
as k →∞, it follows from continuous dependence of solutions on initial
conditions that φ
t
(Z) is defined and in P for all t ∈[−t
n
,0]. Since this
holds for any t
n
, we see that the solution through Z is an entire solution lying
in
P.
Finally, we show that L is constant on the entire solution through Z .If
L(Z ) = α, then we have L(X (t
n
)) ≥ α and moreover
lim
n→∞
L(X (t
n
)) = α.
More generally, if {s
n
}is any sequence of times for which s
n
→∞as n →∞,
then L(X(s
n
)) → α as well. This follows from the fact that L is nonincreas-
ing along solutions. Now the sequence X(t
n
+ s) converges to φ
s
(Z), and
so L(φ
s
(Z)) = α. This contradicts our assumption that there are no entire
solutions lying in
P on which L is constant and proves the theorem.
In this proof we encountered certain points that were limits of a sequence
of points on the solution through X. The set of all points that are limit points
of a given solution is called the set of ω-limit points, or the ω-limit set, of the
solution X (t). Similarly, we define the set of α-limit points, or the α-limit set,
of a solution X(t ) to be the set of all points Z such that lim
n→∞
X(t
n
) = Z
for some sequence t
n
→−∞. (The reason, such as it is, for this terminol-
ogy is that α is the first letter and ω the last letter of the Greek alphabet.)
The following facts, essentially proved above, will be used in the following
chapter.
Proposition. The α-limit set and the ω-limit set of a solution that is defined
for all t ∈
R are closed, invariant sets.
9.3 Gradient Systems
Now we turn to a particular type of system for which the previous material
on Liapunov functions is particularly germane. A gradient system on
R
n
is a
system of differential equations of the form
X
=−grad V (X )

204 Chapter 9 Global Nonlinear Techniques
where V : R
n
→ R is a C
∞
function, and
grad V =
∂V
∂x
1
, ...,
∂V
∂x
n
.
(The negative sign in this system is traditional.) The vector field grad V is
called the gradient of V . Note that −grad V (X) = grad (−V (X )).
Gradient systems have special properties that make their flows rather simple.
The following equality is fundamental:
DV
X
(Y ) = grad V (X ) · Y .
This says that the derivative of V at X evaluated at Y = (y
1
, ..., y
n
) ∈ R
n
is given by the dot product of the vectors grad V (X ) and Y . This follows
immediately from the formula
DV
X
(Y ) =
n
j=1
∂V
∂x
j
(X) y
j
.
Let X(t ) be a solution of the gradient system with X(0) = X
0
, and let
˙
V :
R
n
→ R be the derivative of V along this solution. That is,
˙
V (X) =
d
dt
V (X(t )).
Proposition. The function V is a Liapunov function for the system X
=
−grad V (X). Moreover,
˙
V (X) = 0 if and only if X is an equilibrium point.
Proof: By the chain rule we have
˙
V (X) = DV
X
(X
)
= grad V (X ) · (−grad V (X ))
=−|grad V (X )|
2
≤ 0.
In particular,
˙
V (X) = 0 if and only if grad V (X ) = 0.
An immediate consequence of this is the fact that if X
∗
is an isolated mini-
mum of V , then X
∗
is an asymptotically stable equilibrium of the gradient
system. Indeed, the fact that X
∗
is isolated guarantees that
˙
V<0ina
neighborhood of X
∗
(not including X
∗
).
To understand a gradient flow geometrically we look at the level surfaces
of the function V :
R
n
→ R. These are the subsets V
−1
(c) with c ∈ R.If

9.3 Gradient Systems 205
X ∈ V
−1
(c)isaregular point, that is, grad V (X) = 0, then V
−1
(c) looks like
a “surface” of dimension n − 1 near X. To see this, assume (by renumbering
the coordinates) that ∂V /∂x
n
(X) = 0. Using the implicit function theorem,
we find a C
∞
function g : R
n−1
→ R such that, near X, the level set V
−1
(c)
is given by
V
x
1
, ..., x
n−1
, g
(
x
1
, ..., x
n−1
)
= c.
That is, near X, V
−1
(c) looks like the graph of the function g . In the special
case where n = 2, V
−1
(c) is a simple curve through X when X is a regular
point. If all points in V
−1
(c) are regular points, then we say that c is a regular
value for V . In the case n = 2, if c is a regular value, then the level set V
−1
(c)
is a union of simple (or nonintersecting) curves. If X is a nonregular point for
V , then grad V (X) = 0, so X is a critical point for the function V , since all
partial derivatives of V vanish at X .
Now suppose that Y is a vector that is tangent to the level surface V
−1
(c)at
X. Then we can find a curve γ (t ) in this level set for which γ
(0) = Y . Since
V is constant along γ , it follows that
DV
X
(Y ) =
d
dt
t=0
V ◦ γ (t ) = 0.
We thus have, by our observations above, that grad V (X) · Y = 0, or, in
other words, grad V (X ) is perpendicular to every tangent vector to the level
set V
−1
(c)atX. That is, the vector field grad V (X ) is perpendicular to the
level surfaces V
−1
(c) at all regular points of V . We may summarize all of this
in the following theorem.
Theorem. (Properties of Gradient Systems) For the system X
=
−grad V (X ):
1. If c is a regular value of V , then the vector field is perpendicular to the level
set V
−1
(c).
2. The critical points of V are the equilibrium points of the system.
3. If a critical point is an isolated minimum of V , then this point is an
asymptotically stable equilibrium point.
Example. Let V : R
2
→ R be the function V (x, y) = x
2
(x −1)
2
+y
2
. Then
the gradient system
X
= F(X) =−grad V (X)
is given by
x
=−2x(x − 1)(2x − 1)
y
=−2y.