Hassani S. Mathematical Physics: A Modern Introduction to Its Foundations
Подождите немного. Документ загружается.

g(w)
= 1.
15.4
ASYMPTOTIC
BEHAVIOR
OF
BESSEL
FUNCTIONS
443
15.4 Asymptotic Behavior
of
Bessel Functions
As mentioned before, integral representations are particularlyuseful for determin-
ing the asymptotic behavior
of
functions.
For
Besselfunctions we can considertwo
kinds
of
limits. Assumiug that both v and z = x
are
real, we can considerv --+
00
or x --+
00.
First, let us considerthe behavior
of
J
v
(x)
oflarge
order.
The
appropri-
ate method
for
calculating the asymptotic
form
is the
method
of
steepest descent
discussed in Chapter
II
for which v takes the place
of
the large parameter a. We
use Equation(15.17) becauseits integrandis simplerthanthat
of
Equation(15.13).
The form
of
the integrand in Equation (15.17)
may
want
to suggest
f(w)
=
-w
and g(w) = e" sinhw. However, this choice does
not
allow setting
f'
(w) equal
to zero. To proceed, therefore, we write the exponent as
v
(~
sinh w-
w),
and
conveniently introduce
x]»
es
1/
cosh
wo,
with
wo a real number, which we take
to be positive. Substituting this in the equation above, we can
read
off
sinh w
f(w)
= h
-w,
cos
wo
The
saddle point is obtained from
df/dw
= °or cosh w =
cosh
woo
Thus,
w =
±wo
+
2in:n:,
for n = 0, 1, 2
....
Since the contour C
'
lies in the right half-
plane, we choose
Wo
as the saddle point.
The
second derivative fN (wo) is simply
tanh
wo, which is real, making Ih = 0,
and
el
= n
/2
or
3:n:
/2.
The
convention
of
Chapter
II
suggests taking
el
=
:n:
/2
(see Figure 15.4). The rest is a matter
of
substitution. We are interested in the approximationto w up to the third orderin t:
w - wo =
bIt
+ b2t
2
+ b3t3. Using Equations (11.31), (11.37), and (11.38), we
can easily find the three coefficients:
bl =
v"i
eWI
= i
v"i
1f"(woJll/2
,Jtanh
wo'
b
=
f"'(wo)
e4i81
= cosh
2
Wo
2 31f"(wo)12 3 sinh
2
wiJ'
{
5[f"'(wo)f
f(4l(w
O)}
v"ie
3i91
b3
= 3[f"(wO)]2 -
f"(wo)
121f"(wo)!3/2
.
v"i
(5
2 )
-
-I
- coth
Wo
- 1
- 12(tanh
wO)3/2
3 .
If
we substitute the above in Equation (11.36), we obtain the following asymp-
totic formula valid for
v --+
00:
eX(sinh
WO-Wij
coshWO) [ I ( 5
2)
]
Jv(x)'"
1+
I--coth
wo +
...
(2:n:x
sinh wo)I/2 8x sinh
Wo
3 '
where
v is
related
to WQ via v = x cosh
woo
444 15.
INTEGRAL
TRANSFORMS
AND
DIFFERENTIAL
EQUATIONS
v
ire---------
u
-ix - - -
~-=--=:-::=-
- -
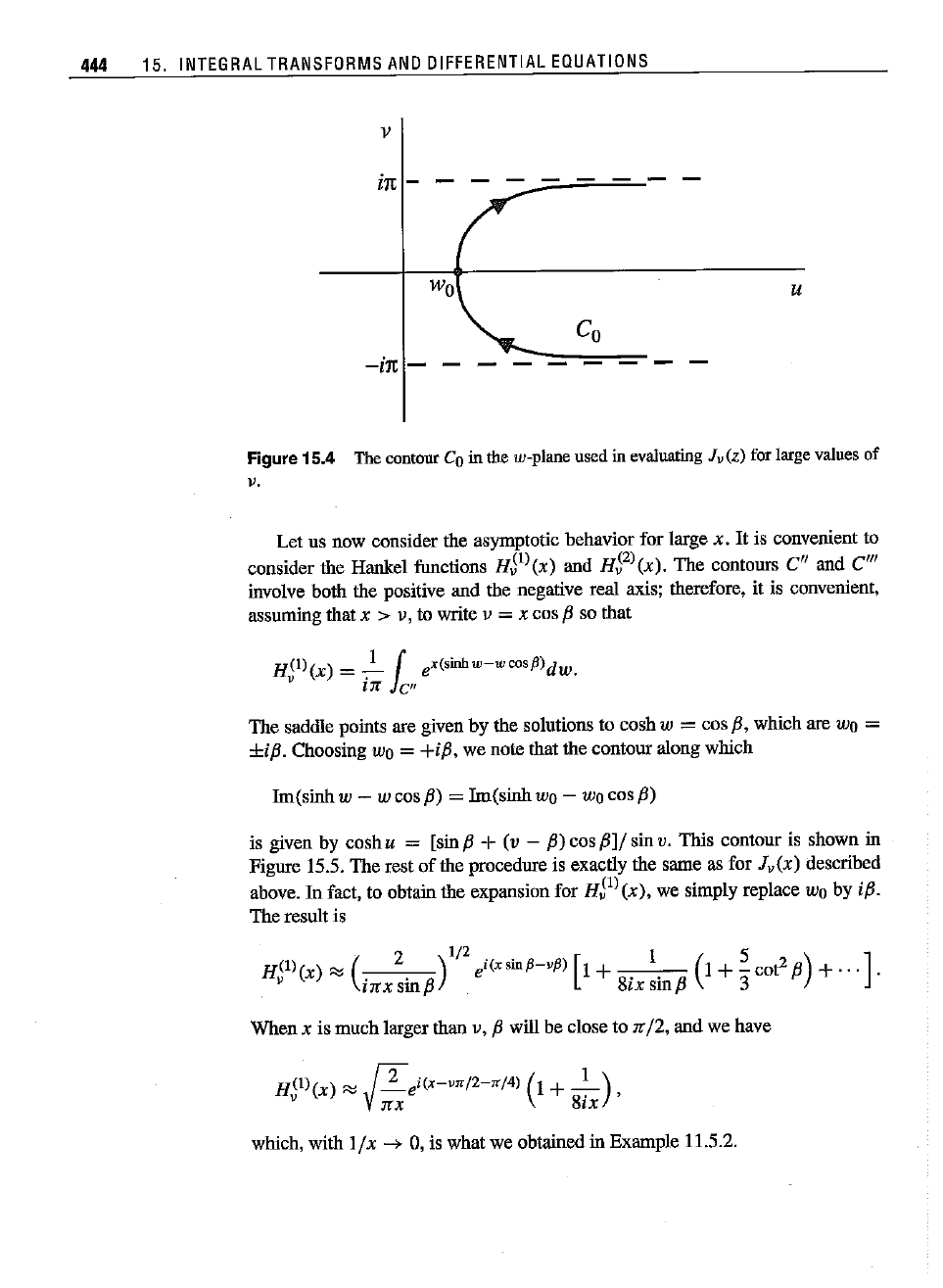
Figure15.4 The
contour
Coin the
w-plane
usedin
evaluating
Jv(z)
for
large
values
of
v.
Let us now consider the asymptotic behavior for large x.
It
is convenient to
consider the Hankel functions
HSt)(x) and HS
2)(x).
The contours e" and
ell!
involve both the positive and the negative real axis; therefore, it is convenient,
assuming that
x > v, to write v = x cos fJ so that
The saddle points are given by the solutions to cosh
W =cos fJ, which are WQ =
±ifJ. Choosing WQ = +ifJ, we note that the contour along which
Im(sinh
W - W cos fJ) = Im(sinh WQ - WQ cos fJ)
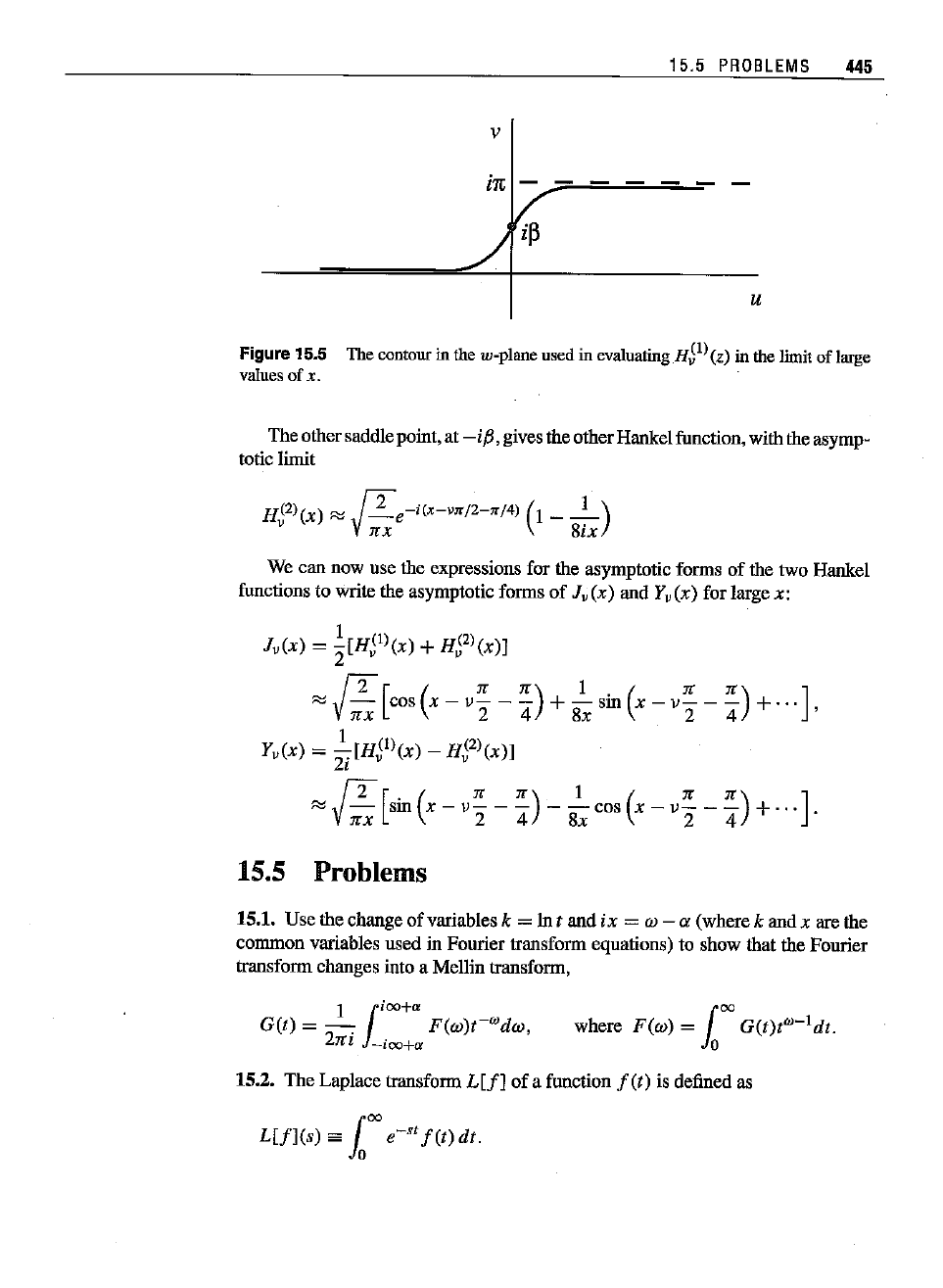
is given by
coshu
= [sinfJ + (v - fJ)cosfJ]/sinv. This contour is shown in
Figure 15.5. The rest
of
the procedure is exactly the same as for Jv(x) described
above. In fact, to obtain the expansion for
HS
1
)
(x),
we simply replace WQ by ifJ.
The result is
2 V2 I 5
H(l)(x)
'"
(.
. )
ei(xsin~-v~)
[I+ . .
(I
+
-cot
2
fJ)
+...
J.
v
mx
smfJ g.x smfJ 3
When
x is much larger than v, fJ will be close to
](/2,
and we have
HS1l(x)
'"
(2e
i
(X- vrr/2- rr/4)
(1
+
~)
,
'In
g.x
which, with
11
x
-+
0, is what we obtained in Example 11.5.2.
15.5
PROBLEMS
445
v
u
Figure 15.5 The
contour
inthe
w-plane
usedin
evaluating
.H51)
(z) in thelimitof
large
values
ofx.
The othersaddle point, at
-if!,
givesthe otherHankel function, with the asymp-
totic limit
H(2)(X)
'"
(2e-
i(X-vrr/2-rr/4)
(1
_
~)
v V;;
8IX
We can now use the expressions for the asymptotic forms of the two Hankel
functions to write the asymptotic forms of
Jv(x)
and Yv(x) for large x:
Jv(x)
=
&[H~l)(X)
+
H~2\x)]
'"
(2
[cos
(x
-
v~
-
~)
+
~
sin
(x
-
v~
-
~)
+...] '
V;-;
2 4 8x 2 4
Yv(x) =
;i
[H~l)(x)
-
H~2)(x)]
"'J
:x
[Sin(x-vi
-~)
-
8~
cos
(x-vi
-~)+"l
15.5 Problems
15.1. Use the change of variables k =
Int
and
ix
=w
-Cl
(wherek
and x are the
common variables used in Fourier transform equations) to show that the Fourier
transform changes into a Mellin transform,
I l
ioo
+
u
G(t)
=
-.
F(w)t-Wdw,
21l'1
-ioo+a
15.2. The Laplace transform
L[f]
of
a function
f(l)
is defined as
L[J](s)
sa
10
00
e-
st
f(t)
dt.
446 15.
INTEGRAL
TRANSFORMS
AND
DIFFERENTIAL
EQUATIONS
Show that
the
Laplace transform
of
is
I
(a)
f(t)
= 1
s
is
s
(b)
f(t)
= coshtot
s2 - w
2
'
is
w
(c)
f(t)
=
sinhwt
s2 - (J)2'
is
s
(d)
f(t)
=coswt
s2
+w2·
is
w
(e)
f(t)
=
sinwt
s2 +w
2·
f(t)
= eM for t > 0,
1
(f)
is ,
s-w
(g)
f(t)
= t" is
f(n
+1)
sn+l
,
15.3. Evaluate the integral
where
s >
O.
wheres
2
> (li2.
wheres > w.
where s > 0, n >
-1.
(15.19)
10
00
sintat
f(t)
=
--dw
o w
by finding the Laplace transform
and
changing the order
of
integration. Express
the result for both
t > 0
and
t < 0 in terms
of
the
theta function. (You will
need
some results
from
Problem 15.2.)
15.4. Show that the Laplace transform
of
the
derivative
of
a function is given by
L[F'](s)
=
sL[F](s)
- F(O). Similarly, show that for the second derivative the
transform is
L[FI/](s)
=
s2L[F](s)
-
sF(O)
- F'(O).
Use
these results to solve
the
differential equation.
ul/(t)
+w
2
u(t) = 0 snbject to
the boundary conditions
u(O) =a, u'(O) =O.
15.5. Solve the DE
of
Equation
(15.5).
15.6. Calculate the surface
term
for the hypergeometric DE.
15.7. Determine the constant
C'
in Equation (15.6), the solutionto the hypergeo-
metric DE. Hint: Expand
(t -
z)-a
inside the integral,
use
Equations (11.19) and
(11.17), and compare the ensuing series with
the
hypergeometric series
of
Chapter
14.
15.8.: Derive the Euler formula [Equation (15.7)].
15.9. Show that
f(y)f(y
- a -
fJ)
F(a,
fJ;
y;
1) =
f(y
_
a)r(y
-
fJ)'
15.5
PROBLEMS
447
Hint: Use Equation (11.19). Equation (15.19) was obtained by Gauss using only
hypergeometric series.
15.10. We determine the asymptotic behavior
of
<l>(a,
y;
z) for z -->
00
in this
problem. Break up the integral in Equation (15.11) into two parts, one from
oto
-00
and the other from
-00
to 1. Substitute
-t/z
for t in the first integral, and
1 -
t/ z for t in the second. Assuming that z -->
00
along the positive real axis,
show that the second integral will dominate, and that
as z
----*
00.
r(y)
<l>(a,
y;
z) -->
f(a)z·-YeZ
15.11. Inthis problem, we determine the constant k
of
Equation (15.12).
(a) Write the contour integral
of
Equation (15.12) for each of the three pieces
of
the contour. Note that arg(t) =
-n
as t comes from
-00
and arg(t) =n as t goes
to
-00.
Obtain a real integral from 0 to
00.
(b) Use the relation
f(z)f(1
- z) =
tt]
sin n z, obtained in Chapter 11, to show
that
n
I'(v-z) =
r(z
+1) sin
xz
(c) Expand the function exp(z2/4t) in the integral of part (a), and show that the
contour integral reduces to
.,
~
(z)2n
f(-n
- v)
-2l
smVJr L." - .
n=O
2
f(n
+1)
(d) Use the resnlt of part (c) in part (b), and compare the resnlt with the series
expansion of
Jv(z) in Chapter 14 to arrive finally at k =
1/(2ni).
15.12. By integrating along
Ct,
C2, C3, and C4
of
Figure 15.2, derive Equation
(15.18).
15.13. By substituting t = exp(ill) in Equation (15.14), show that
00
00
eiZ';ne = Jo(z) +2
I:
hn(z)
cos(2nll) +2i
I:
hn+J
(z) sin[(2n +
1)11].
n=l
n=O
In
parricular, show that
1
121<
. .o
Jo(z) = -
e,<sm
dll.
2n
0
15.14. Derive theintegral representations
of
HJl)
(x)
and
HJ2)
(x)
given in Section
15.3.
448 15. INTEGRAL
TRANSFORMS
AND
DIFFERENTIAL
EQUATIONS
Additional Reading
1. Dennery,
P.
and Krzywicki, A Mathematicsfor Physicists, Harperand Row,
1967.
2. Mathews,
J. and Walker, R. Mathematical Methods
of
Physics, 2nd ed.,
Benjamin, 1970.
Part V _
Operators on Hilbert Spaces
16,
_
An Introduction to
Operator
Theory
The first two parts of the bookdealt almost exclusively with algebraic techniques.
The third and fourth part were,devoted to analytic methods. In this introductory
chapter, we shall
try
to unite these two branches
of
mathematics to gaiu insight
into the nature
of
some of the important equations in physics and their solutions.
Let
us start with a familiar problem.
16.1 From Abstract to Integral and Differential Op-
erators
Let'ssay we wanttosolve anabstractvector-operatorequationAlu) = Iv) in an
N-
dimensional vector space V. Tothis end, we select a basis B =
{lUi)
)~1'
write the
equation in matrix form, and solve the resulting system of N linearequations. This
produces the components of the solution
lu) in B. If components in another basis
B' are desired, they can be obtainedusing the similaritytransformationconnecting
the two bases (see Chapter 3).
There is a standard formal procedure for obtaining the matrix equation.
It
is convenient to choose an orthonormal basis B = IIei)}
~1
for V and refer
all components to this basis. The procedure involves contracting both sides
of
the equation with (eil and inserting 1 =
r.7=1Iej)
(ejl between A and lu):
r.7=1
(eil A lej)
(ejl
u) = (eil v) for i =
1,2,
...
, N, or
N
LAijuj
= Vi
j=l
fori=1,2,
...
,N,
(16.1)
452 16.
AN
INTRODUCTION
TO
OPERATOR
THEORY
where
Ai}
sa
(eilAlej)
, Uj ss
(ejlu),
and Vi ss
(eilv).
Equation (16.1) is a
system of
N linear equations in N unknowns Iuj
J7=1'
which can be solved to
obtain the solution(s) of the original eqnation in
B.
A convenient basis is that in which A is represented by a diagonal matrix
diag(AI,
A2,
'"
,AN).
Then the operatorequationtakes the simplcform
x.a,
= Vi,
and the solution becomes immediate.
Let us now apply the procedure just described to infinite-dimensional vector
spaces, in particnlar, for the case of a continuous index. We want to find the
solutions of
K Iu) =
If).
Following the procedure used above, we obtain
(xl K
(lab
IY)
w(y)
(YI
d
Y)
lu} =
lab
(xl K Iy)
w(y)
(YI u) dy =
(xl
f)
,
where we have used the results obtained in Chapter 6. Writing this in functional
notation,
we have
lab
K(x,
y)w(y)u(y)
dy =
f(x),
(16.2)
Integral
operators
which is the continuous analogue of Equation (16.1). Here (a, b) is the interval
and
kernels
on which the functions are defined. We note that the indices have tumed into
continuous arguments, and the snm has turned into an integral. The operator
K that
leads to an equation such as
(16.2) is called an
integral
operator
(10), and the
"matrix
element"
K(x, y) is saidtobeitskernel.
The discussion of the discrete case mentioned the possibility of the operator A
being diagonal in the given basis B. Let us do the same with (16.2); that is, noting
that x and y are indices for
K,
let us assume that
K(x,
y) = 0 for x
oft
y. Such
local
operators
operators are called local
operators.
For local operators, the contribution to the
integral comes ouly at the point where
x = y (hence, their name).
If
K (x,
y)
is
finite at this point, and the functions w
(y)
and u
(y)
are well behaved there, the
LHS
of
(16.2) will vanish, and we will get inconsistencies. To avoid this, we need
to have
( )
{
o
if x
oft
y,
K
x,y
= .
00
If x = y.
Thus,
K(x,
y) has the behavior of a delta function. Letting K (x, y) sa
L(x)8(x
-
y)/w(x)
and substituting in Equation (16.2) yields
L(x)u(x)
=
f(x).
Inthe
discrete
case,
A.i
was
merely
an
indexed
number;
its
continuous
analogue,
L(x),
may represent merely a function. However, the fact that x is a continuous
variable (index) gives rise to other possibilities for
L(x)
that do not exist for the
discrete case. For instance, L(x) could be a differential operator. The derivative,
although defined by a limiting process involving neighboring points, is a local
operator. Thus, we can speak
of
the derivative
of
a function at a point. For the