Gibilisco S. Teach Yourself Electricity and Electronics
Подождите немного. Документ загружается.

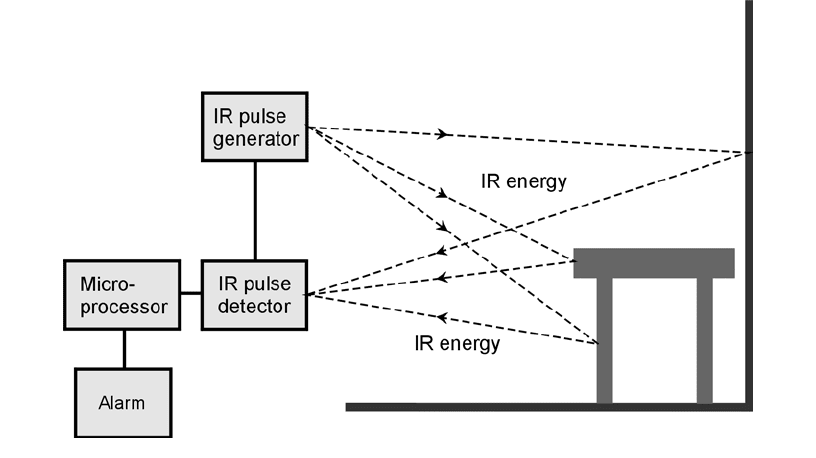
Ultrasonic Motion Detector
Motion in a room can be detected by sensing the changes in the relative phase of acoustic waves. An
ultrasonic motion detector employs a set of transducers that emit acoustic waves at frequencies above
the range of human hearing (higher than 20 kHz). Another set of transducers picks up the reflected
acoustic waves, whose wavelength is on the order of a few millimeters. If anything in the room
changes position, the relative phase of the waves, as received by the various acoustic pickups, will
change. This data is sent to a microprocessor, which can trigger an alarm and/or notify the police.
Robot Generations and Laws
Some researchers have analyzed the evolution of robots, marking progress according to so-called
robot generations. One of the first engineers to make formal mention of robot generations was the
Japanese engineer Eiji Nakano.
First Generation
According to Nakano, a first-generation robot is a simple mechanical arm. Such machines have the
ability to make precise motions at high speed, many times, for a long time. They have found wide-
spread industrial application and have been in existence since the middle of the twentieth century.
These are the fast-moving systems that install rivets and screws in assembly lines, that solder con-
nections on printed circuits, and that, in general, have taken over tedious, mind-numbing chores
that would otherwise have to be done by humans.
First-generation robots can work in groups if their actions are synchronized. The operation of
these machines must be constantly watched, because if they get out of alignment and are allowed to
keep operating anyway, the result can be a series of bad production units.
Robot Generations and Laws 591
34-3 An IR motion detector.
Second Generation
A second-generation robot has some level of artificial intelligence (AI), also called machine intelligence.
Such a machine is equipped with various sensors that keep it informed about goings-on in the work
environment. A computer called a robot controller processes the data from the sensors and adjusts the
operation of the robot accordingly. The earliest second-generation robots came into common use
around 1980.
Second-generation robots can stay synchronized with each other, without having to be overseen
constantly by a human operator. Periodic checking is needed, however, because things can always go
wrong. In fact, as a system becomes more complex, the number of ways in which it can malfunction
increases. This is why human beings will never find themselves out of work because of robots. Some-
one has to make sure the robots keep working properly!
Third Generation
Nakano gave mention to third-generation robots, but in the years since the publication of his origi-
nal paper, some things have changed. Two major avenues are developing for advanced robot tech-
nology. These are the autonomous robot and the insect robot. An autonomous robot is a single
machine that works on its own. It contains a controller and can do things largely without supervi-
sion, either by an outside computer or by a human being. A good example of this type of third-
generation robot is the personal robot about which technophiles dream. An insect robot is one of a
set of several (or many) identical units that act together to perform a specific task.
Fourth Generation and Beyond
Nakano did not write about anything past the third generation of robots. But we might mention a
fourth-generation robot: a machine of a sort yet to be deployed. An example is a fleet or population
of robots that can reproduce themselves, and perhaps even a system that can evolve to meet chang-
ing conditions in its work environment. Past that, we might say that a fifth-generation robot is some-
thing humans haven’t even imagined yet.
Asimov’s Three Laws
In one of his early science-fiction stories, the famous author Isaac Asimov first mentioned the word
robotics, along with three fundamental rules that, in his opinion, all robots ought to obey. These
rules were first coined in the 1940s, but Asimov’s three laws of robotics are still considered valid today:
• First law: A robot must not injure, or allow the injury of, any human being.
• Second law: A robot must obey all orders from humans, except orders that would contradict
the first law.
• Third law: A robot must protect itself, except when to do so would contradict the first law
or the second law.
Robot Arms
A robot arm, in conjunction with an end effector (hand, gripper, or tool), is called a manipulator.
Some robots, especially industrial robots, are nothing more than sophisticated manipulators. A
robot arm can be categorized according to its geometry. Some manipulators resemble human arms.
The joints in these machines can be given names like “shoulder,” “elbow,” and “wrist.” Other ma-
nipulators are so much different from human arms that these names don’t make sense.
592 Monitoring, Robotics, and Artificial Intelligence
Degrees of Freedom
The term degrees of freedom refers to the number of different ways in which a robot manipulator can
move. Most manipulators move in three dimensions, but often they have more than three degrees
of freedom.
You can use your own arm to get an idea of the degrees of freedom that a robot arm might have.
Extend your right arm straight out toward the horizon. Extend your index finger so it is pointing.
Keep your arm straight, and move it from the shoulder. You can move your shoulder joint in three
ways. Up-and-down movement is called pitch. Movement to the right and left is called yaw. You can
rotate your whole arm from the shoulder (albeit to a limited extent); this motion is called roll. Your
shoulder therefore has three degrees of freedom: pitch, yaw, and roll.
Now move your arm from the elbow only. Holding your shoulder in the same position con-
stantly, you will see that your elbow joint has the equivalent of pitch in your shoulder joint. But that
is all. Your elbow, therefore, has one degree of freedom.
Extend your arm toward the horizon again. Now move only your arm below the elbow. Your
forearm and wrist can bend up and down, side to side, and it can also twist. Your lower arm has
three degrees of freedom.
Robot Arms 593
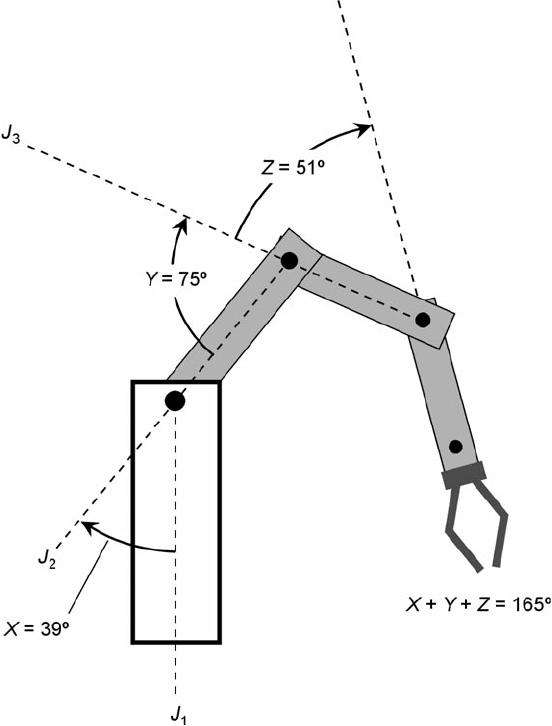
34-4 An example of
degrees of rotation in
articulated geometry.
Angles X, Y, and Z
are measured relative
to axes J
1
, J
2
, and J
3
,
respectively.
In total, your arm has seven degrees of freedom: three in the shoulder, one in the elbow, and
three in the arm below the elbow.
It is tempting to suppose that a robot should never need more than three degrees of freedom,
because, after all, space has only three dimensions. But the extra possible motions, provided by mul-
tiple joints, give a robot arm (and a human arm) versatility that it could not have with only three
degrees of freedom.
Degrees of Rotation
The term degrees of rotation refers to the extent to which a robot joint, or a set of robot joints, can
turn clockwise or counterclockwise with respect to a prescribed linear axis. Some reference point
is always used, and the angles are given in degrees with respect to that joint. Rotation in one di-
rection (usually clockwise) is represented by positive angles; rotation in the opposite direction is
specified by negative angles. Thus, for example, if angle X = 58°, it refers to a rotation of 58°
clockwise with respect to the reference axis. If angle Y =−74°, it refers to a rotation of 74° coun-
terclockwise.
Figure 34-4 shows a robot arm with three joints. The reference axes are J
1
, J
2
, and J
3
for rotation
angles X, Y, and Z, respectively. The individual angles add together. To move this robot arm to a cer-
tain position within its work envelope (the region in space that the arm can reach and actually ma-
nipulate things), the operator enters data into a computer. This data includes the measures of angles
X, Y, and Z. The operator has specified X = 39°, Y = 75°, and Z = 51°.
594 Monitoring, Robotics, and Artificial Intelligence
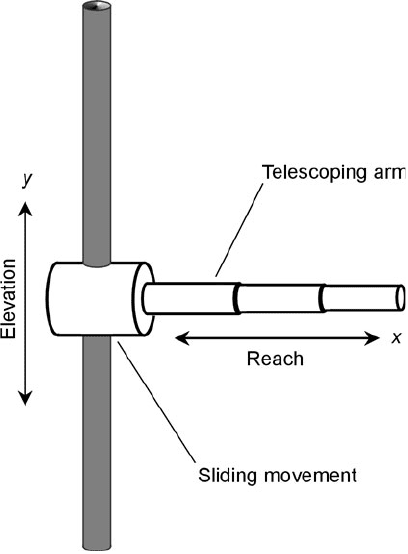
34-5 Cartesian coordinate
geometry in two
dimensions.
Articulated Geometry
The word articulated means “broken into sections by joints.” A robot arm with articulated geometry
bears some resemblance to the arm of a human. The versatility is defined in terms of the number of
degrees of freedom. For example, an arm might have three degrees of freedom: base rotation (the
equivalent of azimuth), elevation angle, and reach (the equivalent of radius). If you’re a mathemati-
cian, you might recognize this as a system of spherical coordinates. There are several different articu-
lated geometries for any given number of degrees of freedom. Figure 34-4 is a simplified drawing of
a robot arm that uses articulated geometry.
Cartesian Coordinate Geometry
Another mode of robot arm movement is known as Cartesian coordinate geometry or rectangular co-
ordinate geometry. This term comes from the Cartesian coordinate system often used for graphing
mathematical functions. The axes are always perpendicular to each other. Variables are assigned the
letters x and y in a two-dimensional Cartesian plane, or x, y, and z in Cartesian three-space. The di-
mensions are called reach for the x variable, elevation for the y variable, and depth for the z variable.
Figure 34-5 is a simplified rendition of a robot arm capable of moving in two dimensions using
Cartesian coordinate geometry.
Robot Arms 595
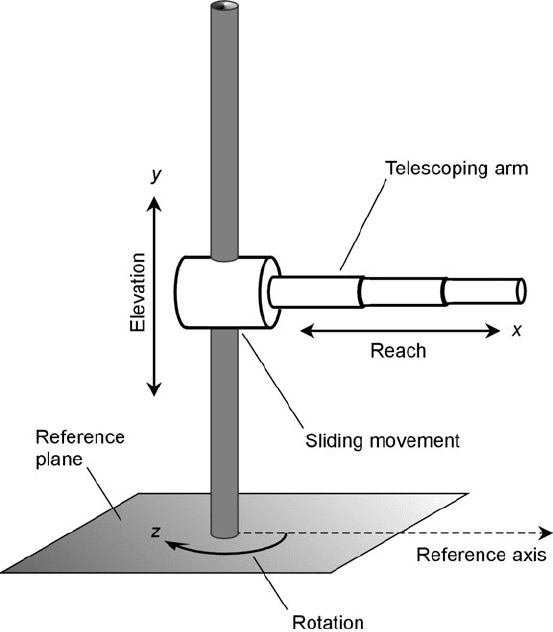
34-6 Cylindrical coordinate
geometry in three
dimensions.
Cylindrical Coordinate Geometry
A robot arm can be guided by means of a two-dimensional navigator’s polar coordinate system with
an elevation dimension added (Fig. 34-6). This is known as cylindrical coordinate geometry. In this
system, a reference plane is used. An origin point is chosen in this plane. A reference axis is defined,
running away from the origin in the reference plane. In the reference plane, the position of any
point can be specified in terms of reach x, elevation y, and rotation z. The rotation is defined as the
angle that the reach arm subtends relative to the reference axis. In this example, it is in the clockwise
sense. Note that this is just like the situation for two-dimensional Cartesian coordinate geometry
shown in Fig. 34-5, except that the sliding movement is also capable of rotation.
The rotation angle z can range from 0° to 360° clockwise from the reference axis. In some sys-
tems, the range is specified as 0° to +180° (up to a half circle clockwise from the reference axis), and
0° to −180° (up to a half circle counterclockwise from the reference axis).
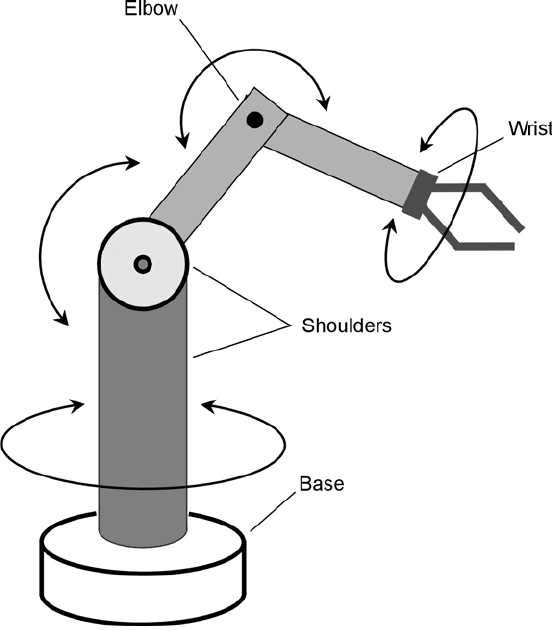
Revolute Geometry
A robot arm capable of moving in three dimensions using revolute geometry is shown in Fig. 34-7.
The whole arm can rotate through a full circle (360°) at the base point, or shoulder. There is also an
elevation joint at the base that can move the arm through 90°, from horizontal to vertical. A joint
in the middle of the robot arm, at the elbow, moves through 180°, from a straight position to dou-
596 Monitoring, Robotics, and Artificial Intelligence
34-7 Revolute geometry in
three dimensions.
bled back on itself. There might be, but is not always, a wrist joint that can flex like the elbow and/or
twist around and around.
A 90° elevation revolute robot arm can reach any point within a half sphere. The radius of the
half sphere is the length of the arm when its elbow and wrist (if any) are straightened out. A 180°
elevation revolute arm can be designed that will reach any point within a fully defined sphere, with
the exception of the small obstructed region around the base.
Robot Hearing and Vision
Machine hearing involves detection of acoustic waves, along with amplification and analysis of the
resulting audio signals. Machine vision involves the interception of visible, infrared (IR), or ultravi-
olet (UV) radiation, and translating this energy into electronic images. Machine hearing and vision
can allow robots to locate, and in some cases classify or identify, objects in the environment.
Binaural Hearing
Even with your eyes closed, you can usually tell from which direction a sound is coming. This is be-
cause you have binaural hearing. Sound arrives at your left ear with a different intensity, and in a dif-
ferent phase, than it arrives at your right ear. Your brain processes this information, allowing you to
locate the source of the sound, with certain limitations. If you are confused, you can turn your head
until the direction becomes apparent.
Robots can be equipped with binaural hearing. Two acoustic transducers are positioned, one on
either side of the robot’s head. A microprocessor compares the relative phase and intensity of signals
from the two transducers. This lets the robot determine, within certain limitations, the direction
from which sound is coming. If the robot is confused, it can turn until the confusion is eliminated
and a meaningful bearing is obtained. If the robot can move around and take bearings from more
than one position, a more accurate determination of the source location is possible if the source is
not too far away.
Visible-Light Vision
A visible-light robotic vision system must have a device for receiving incoming images. This is usu-
ally a charge coupled device (CCD) video camera, similar to the type used in home video cameras.
The camera receives an analog video signal. This is processed into digital form by an ADC. The dig-
ital signal is clarified by means of DSP. The resulting data goes to the robot controller.
The moving image, received from the camera and processed by the circuitry, contains an enor-
mous amount of information. It’s easy to present a robot controller with a detailed and meaningful
moving image. But getting the robot controller to know what’s happening, and to determine
whether or not these events are significant, is another problem altogether.
Optical Sensitivity and Resolution
Optical sensitivity is the ability of a machine vision system to see in dim light or to detect weak im-
pulses at invisible wavelengths. In some environments, high optical sensitivity is necessary. In oth-
ers, it is not needed and might not be wanted. A robot that works in bright sunlight doesn’t need to
be able to see well in a dark cave. A robot designed for working in mines, pipes, or caverns must be
able to see in dim light, using a system that might be blinded by ordinary daylight.
Robot Hearing and Vision 597
Optical resolution is the extent to which a machine vision system can differentiate between ob-
jects that are close together in the field of vision. The better the optical resolution, the keener the vi-
sion. Human eyes have excellent optical resolution, but machines can be designed to have superior
resolution.
In general, the better the optical resolution, the more confined the field of vision must be. To
understand why this is true, think of a telescope. The higher the magnification, the better its opti-
cal resolution will be, up to a certain maximum useful magnification. Increasing the magnification
reduces the angle, or field, of vision. Zeroing in on one object or zone is done at the expense of other
objects or zones.
Optical sensitivity and resolution are interdependent. If all other factors remain constant, im-
proved sensitivity causes a sacrifice in resolution. Also, the better the optical resolution, the more
incident light it requires to function well. In this case, a good analogy is camera film (the old-
fashioned kind). The fastest films require more light than slow ones. The corollary to this is the fact
that if you want excellent detail in a photograph, you will have to expose the film for a compara-
tively long period of time.
Invisible and Passive Vision
Robots have an advantage over people when it comes to vision. Machines can see at wavelengths to
which humans are blind.
Human eyes are sensitive to EM waves whose length ranges from 390 to 750 nanometers (nm).
The nanometer is a thousand-millionth (10
−9
) of a meter. The longest visible wavelengths look red.
As the wavelength gets shorter, the color changes through orange, yellow, green, blue, and indigo.
The shortest waves look violet. Infrared (IR) energy is at wavelengths somewhat longer than 750
nm. Ultraviolet (UV) energy is at wavelengths somewhat shorter than 390 nm.
Machines, and most nonhuman living species, can see energy in a range of wavelengths that dif-
fers somewhat from the range of wavelengths to which human eyes respond. For example, insects
can see UV that humans cannot, but insects are blind to red and orange light that humans can see.
(Have you used orange bug lights when camping to keep the flying pests from coming around at
night, or those UV devices that attract bugs and then zap them?)
A robot can be designed to see IR and/or UV, as well as (or instead of) visible light, because
video cameras can be sensitive to a range of wavelengths much wider than the range humans can see.
Robots can be made to see in an environment that is dark and cold, and that radiates too little en-
ergy to be detected at any electromagnetic wavelength. In these cases the robot provides its own il-
lumination. This can be a simple lamp, a laser, an IR device, or a UV device. Radar and sonar can
also be used.
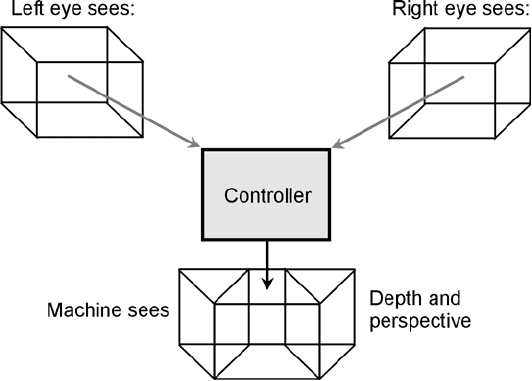
Binocular Vision
Binocular machine vision is the analog of binocular human vision. It is sometimes called stereo vision
or stereoscopic vision. In humans, binocular vision allows perception of depth. With only one eye—
that is, with monocular vision—you can infer depth only to a limited extent, and that perception is
entirely dependent on your knowledge of the environment or scene you are observing. Almost
everyone has had the experience of being fooled when looking at a scene with one eye covered or
blocked. A nearby pole and a distant tower might seem to be adjacent, when in fact they are a city
block apart.
Figure 34-8 shows the basic concept of binocular robot vision. High-resolution video cameras,
and a sufficiently powerful robot controller, are essential components of such a system.
598 Monitoring, Robotics, and Artificial Intelligence
Color Sensing
Robot vision systems often function only in grayscale, like old-fashioned 1950s television. But color
sensing can be added, in a manner similar to the way it is added to television systems. Color sens-
ing can help a robot with AI figure out what an object is. Is that horizontal surface a parking lot, or
is it a grassy yard? Sometimes, objects have regions of different colors that have identical brightness
as seen by a grayscale system. Such objects, obviously, can be evaluated in more detail with a color-
sensing system than with a vision system that sees only shades of gray.
In a typical color-sensing vision system, three grayscale cameras are used. Each camera has a
color filter in its lens. One filter passes red light, another passes green light, and another passes blue
light. These are the three primary colors. All possible hues, levels of brightness, and levels of satura-
tion are made up of these three colors in various ratios. The signals from the three cameras are
processed by a microcomputer, and the result is fed to the robot controller.
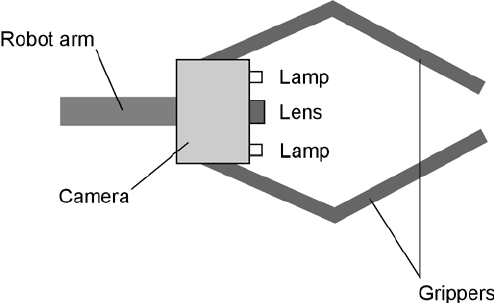
The Eye-in-Hand System
In order to assist a robot gripper (hand) in finding its way, a camera can be placed in the mechanism.
The camera must be equipped for work at close range, from about 1 m down to 1 mm or less. The
positioning error must be kept as small as possible. To be sure that the camera gets a good image,
lamps are included in the gripper along with the camera (Fig. 34-9). This so-called eye-in-hand sys-
tem can be used to precisely measure the distance between the gripper and the object it is seeking.
It can also make positive identification of the object.
The eye-in-hand system takes advantage of the properties of a servo. The robot is equipped
with, or has access to, a computer that processes the data from the camera and sends instructions
back to the gripper. Most eye-in-hand systems use visible light for guidance and manipulation. In-
frared (IR) can be used when it is necessary for the robot gripper to sense differences in temperature.
The Flying Eyeball
In environments hostile to humans, robots find many uses, from manufacturing to exploration.
One such device, especially useful underwater, has been called a flying eyeball. A cable, containing
Robot Hearing and Vision 599
34-8 Binocular machine
vision. Two different
views of the same
object are combined
to achieve a sense of
depth and perspective.
the robot in a special launcher housing, is dropped from a boat. When the launcher gets to the de-
sired depth, it lets out the robot, which is connected to the launcher by a tether. The tether and the
drop cable convey data back to the boat.
In some cases, the tether for a flying eyeball can be eliminated, and a wireless link can be used
to convey data from the robot to the launcher. The link is usually in the IR or visible red portion of
the spectrum. The robot contains a video camera and one or more lamps to illuminate the under-
water environment. It also has a set of thrusters (jets or propellers) that let it move around accord-
ing to control commands sent from the boat. Human operators on board the boat watch the images
and guide the robot.
Robot Navigation
Mobile robots must get around in their environment without wasting motion, without running into
things, and without tipping over or falling down a flight of stairs. The nature of a robot navigation sys-
tem depends on the size of the work area, the type of robot used, and the sorts of tasks the robot is re-
quired to perform. In this section, we’ll look at four common methods of robot navigation.
Clinometer
A clinometer is a device for measuring the steepness of a sloping surface. Mobile robots use clinome-
ters to avoid inclines that might cause them to tip over or that are too steep for them to ascend while
carrying a load.
The floor in a building is almost always horizontal. Thus, its incline is zero. But sometimes there
are inclines such as ramps. A good example is the kind of ramp used for wheelchairs, in which a very
small elevation change occurs. A rolling robot cannot climb stairs, but it can use a wheelchair ramp,
provided the ramp is not so steep that it would upset the robot’s balance or cause it to lose its payload.
In a clinometer, a transducer produces an electrical signal whenever the device is tipped from
the horizontal. The greater the angle of incline, the greater the electrical output, as shown in the
graph of Fig. 34-10A. A clinometer might also show whether an incline goes down or up. A down-
ward slope might cause a negative voltage at the transducer output, and an upward slope a positive
voltage, as shown in the graph at Fig. 34-10B.
600 Monitoring, Robotics, and Artificial Intelligence
34-9 A robotic eye-in-hand
system.