Gibilisco S. Teach Yourself Electricity and Electronics
Подождите немного. Документ загружается.

4. A mode of communications in which either party can hear while talking, thus allowing one
party to instantly interrupt the other at any time, is called
(a) half simplex.
(b) full simplex.
(c) half duplex.
(d) full duplex.
(e) nothing, because there is no such mode.
5. An FM stereo tuner generally covers a frequency range of
(a) 535 kHz to 1605 kHz.
(b) 88 MHz to 108 MHz.
(c) 3 MHz to 30 MHz.
(d) 9 kHz to 300 MHz.
(e) 144 MHz to 148 MHz.
6. Suppose an antenna has a radiation resistance of 35 Ω and a loss resistance of 15 Ω. What is
the efficiency of the antenna?
(a) 20 percent
(b) 30 percent
(c) 43 percent
(d) 70 percent
(e) Impossible to calculate from this information
7. The peak power output from a multicavity Klystron
(a) can be much greater than the average power output.
(b) can be slightly greater than the average power output.
(c) is about the same as the average power output.
(d) is slightly less than the average power output.
(e) is much less than the average power output.
8. To which of the following does the term platter apply?
(a) An individual disk in a hard drive
(b) An individual disk in CD-R media
(c) An individual disk in CD-RW media
(d) An individual disk in flash memory
(e) An individual disk in RAM
9. Why can signals in the so-called shortwave band sometimes propagate for thousands of
kilometers without the need for satellites, repeaters, or any other infrastructure?
(a) Because EM waves at these frequencies are often returned to the earth by the ionosphere
(b) Because waves at these frequencies can propagate through the ground or the ocean as
electric currents
Test: Part Four 611
(c) Because EM waves at these frequencies are reflected back to the earth by the moon
(d) Because EM waves at these frequencies propagate along the boundary between the
troposphere and the stratosphere
(e) Forget it! Signals in the shortwave band cannot propagate beyond a line of sight without
satellites, repeaters, or other human-made systems.
10. What is the purpose of the filament in a vacuum tube?
(a) It prevents secondary electrons from causing excessive screen grid current.
(b) It causes holes to flow more easily in the collector.
(c) It heats the cathode, thereby increasing the electron emission.
(d) It glows, making the tube easy to locate when servicing is necessary.
(e) Forget it! Vacuum tubes do not have filaments.
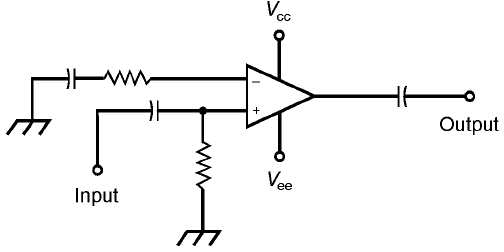
11. Figure Test4-1 is a schematic diagram of
(a) a closed-loop op amp circuit with positive feedback.
(b) a closed-loop op amp circuit with negative feedback.
(c) an open-loop op amp circuit.
(d) an op amp oscillator circuit.
(e) an op amp modulator circuit.
12. Suppose that, in the circuit of Fig. Test4-1, a resistor is connected between the output and the
inverting input. What effect will this have?
(a) It will increase the gain.
(b) It will decrease the gain.
(c) It will increase the frequency.
(d) It will decrease the frequency.
(e) It will have no effect.
13. Which of the following is an example of a serial-access storage medium for computer data?
(a) An external hard drive
(b) An internal hard drive
612 Test: Part Four
Test 4-1 Illustration for
Part 4 Test
Questions 11
and 12.
(c) A CD-R
(d) A CD-RW
(e) A magnetic tape
14. Which of the following is an undesirable characteristic of ELF radiation?
(a) It can cause radiation burns like those produced by overexposure to X rays.
(b) It can increase the susceptibility of a CRT to jitter and poor resolution.
(c) It can reduce the efficiency of an antenna system.
(d) It can result in undesirable modulation in a radio transmitter.
(e) None of the above apply.
15. A zepp antenna measuring λ/2 can be oriented vertically, and the feed line placed so it lies in
the same line as the radiating element. This antenna is known as
(a) a vertical dipole.
(b) a Yagi.
(c) a collinear array.
(d) an end-fire array.
(e) a J pole.
16. The GPS can be used to determine the position of a point in
(a) one dimension.
(b) two dimensions.
(c) three dimensions.
(d) four dimensions.
(e) five dimensions.
17. In a component-type hi-fi system, the cables connecting the various devices should
(a) be resonant at the intended operating frequency.
(b) consist of single conductors only.
(c) be connected in parallel.
(d) consist of two parallel wires whenever possible.
(e) be shielded whenever practicable.
18. In a radar display, the azimuth of a target is equal or proportional to
(a) the distance of the blip representing the target from the center of the display.
(b) the clockwise angle between a radial line from the center toward geographic north, and a
radial line from the center through the blip representing the target.
(c) the diameter of a circle whose center coincides with the center of the display, and that
passes through the blip representing the target.
Test: Part Four 613
(d) the distance of the blip representing the target from the outer edge of the display, or from
a circle whose diameter is equal to the diameter of the display.
(e) Forget it! A radar set cannot determine the azimuth of a target.
19. Which of the following is an example of wireless technology?
(a) The Global Positioning System
(b) A fiber-optic communications system
(c) Digital-to-analog conversion
(d) Serial-to-parallel conversion
(e) All of the above
20. A smoke detector can function by sensing a change in the
(a) temperature of the air.
(b) relative humidity of the air.
(c) barometric pressure of the air.
(d) ionization potential in the air.
(e) amount of nitrogen in the air.
21. Computer disk storage is typically measured in
(a) kilobits, megabits, and gigabits.
(b) kilobits per second, megabits per second, and gigabits per second.
(c) kilobytes, megabytes, and gigabytes.
(d) kilobytes per second, megabytes per second, and gigabytes per second.
(e) any of the above.
22. Which of the following antennas would most likely be used in space communications?
(a) A half-wave dipole antenna
(b) A ground-plane antenna
(c) A helical antenna
(d) A small loop or loopstick antenna
(e) A coaxial antenna
23. The use of a cell phone may be prohibited in a commercial aircraft in flight because
(a) it can interfere with other people’s computers.
(b) it can interfere with other people’s cell phones.
(c) the interior of the aircraft produces a dangerous RF resonant cavity.
(d) the area of coverage will not be wide enough to be of any use.
(e) it can interfere with flight instruments and communications.
24. The circuit shown in Fig. Test4-2 shows two NPN transistors connected in
(a) reverse series.
(b) cascade.
614 Test: Part Four
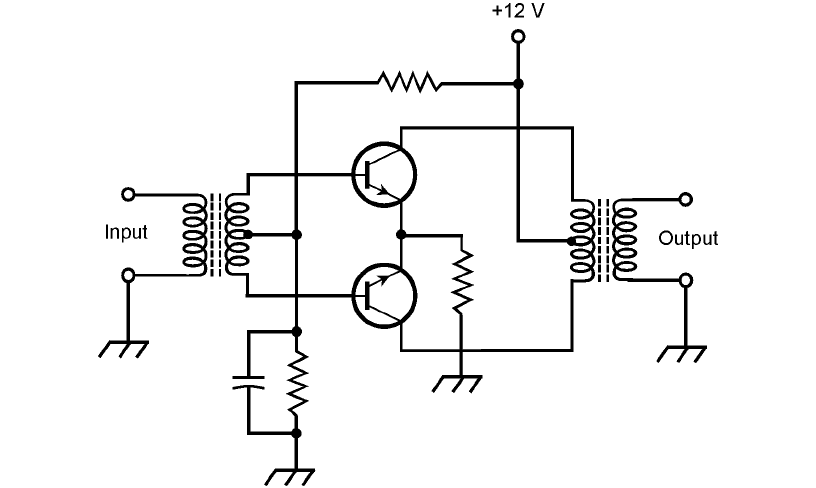
(c) inverse parallel.
(d) push-push.
(e) push-pull.
25. The circuit in Fig. Test4-2 would be a bad choice for use as a medium-power audio amplifier
because
(a) bipolar transistors do not work well in audio applications.
(b) transformers should not be used in audio amplifiers.
(c) this type of circuit invariably produces a lot of distortion.
(d) this type of circuit cannot produce appreciable output power.
(e) Hold it! The circuit in Fig. Test4-2 would be a good choice for use as a medium-power
audio amplifier.
26. In an electrostatic CRT, the electron beam can be diverted up and down by
(a) synchronization pulses applied to the deflecting coils.
(b) ELF radiation from the accelerating anodes.
(c) charged plates that attract or repel moving electrons.
(d) modulation of the signal on the control grid.
(e) variable input to the electron gun.
Test: Part Four 615
Test 4-2 Illustration for Part 4 Test Questions 24 and 25.

27. A device that translates 500-Hz sound waves into ac by means of the interaction between a
permanent magnet and a coil of wire is an example of
(a) an electromechanical loudspeaker.
(b) a passive pressure sensor.
(c) a dynamic transducer.
(d) an inductive proximity sensor.
(e) a piezoelectric transducer.
28. Which of the following considerations is most important in a hi-fi audio power amplifier?
(a) Optimizing the efficiency
(b) Minimizing the operating voltage
(c) Maximizing the linearity
(d) Maximizing the driving power
(e) Biasing beyond the cutoff point
29. A loopstick antenna, oriented so its ends point toward the eastern and western horizons,
exhibits
(a) nulls in the response to signals coming from the east and west.
(b) peaks in the response to signals coming from the east and west.
(c) nulls in the response to signals coming from the north and south.
(d) an omnidirectional response in three-dimensional space.
(e) a peak in the response to signals coming from any horizontal direction, and a null in the
response to signals coming from the zenith (directly overhead).
30. Fill in the blank to make the following sentence true: “An
functions by sensing
variations in the relative phase of acoustic waves reflected from objects in the environment.”
(a) IR transducer
(b) acoustic transponder
(c) electrostatic loudspeaker
(d) ultrasonic motion detector
(e) acoustic pressure sensor
31. Which of the following is an advantage of a large LCD over a large CRT display?
(a) Lower cost
(b) Lighter weight
(c) Greater ELF radiation
(d) The use of electron beams and deflecting coils
(e) All of the above
32. An op amp can produce or facilitate
(a) a low signal-to-noise ratio in an oscillator.
(b) improved efficiency in an antenna system.
616 Test: Part Four
(c) high signal gain over a wide range of frequencies.
(d) a match between a feed line and an antenna.
(e) none of the above.
33. Which of the following is an application of a gas-filled tube?
(a) A high-frequency RF power amplifier
(b) A microwave oscillator
(c) An audio oscillator or amplifier
(d) Decorative lighting
(e) Impedance matching in an antenna system
34. For a communications satellite with an elliptical orbit around the earth, the point at which
the altitude is lowest is the
(a) geominimum.
(b) proxima.
(c) perigee.
(d) approach.
(e) optimum.
35. Suppose an antenna has a radiation resistance of 35 Ω and its feed line has a characteristic
impedance of 50 Ω. What is the efficiency of the antenna?
(a) 15 percent
(b) 41 percent
(c) 59 percent
(d) 70 percent
(e) Impossible to calculate from this information
36. Which of the following is a characteristic of a stepper motor?
(a) It rotates in defined increments, not continuously.
(b) Its turning power increases as its speed increases.
(c) It cannot rotate faster than approximately 1 rpm.
(d) It is not suitable for use in mechanical devices, but only in sensors.
(e) It operates without an external source of power.
37. With respect to ICs, terms such as MSI, LSI, and VLSI define the
(a) maximum number of transistors on the chip.
(b) maximum frequency at which the chip can operate.
(c) maximum power output the chip can produce.
(d) maximum gain the chip can produce.
(e) maximum number of switching operations the chip can perform per second.
Test: Part Four 617

38. In a tetrode vacuum tube amplifier, the screen grid
(a) reduces the capacitance between the control grid and the plate.
(b) serves as an auxiliary output in case the plate circuit is overloaded.
(c) conducts holes away from the control grid.
(d) prevents undesirable reverse bias between the cathode and the control grid.
(e) Forget it! Tetrode tubes do not have screen grids.
39. Fill in the blank in the following sentence to make it true: “On the Web, data is transmitted
by means of a
that allows the files on distant computers to appear as if they are on your own
computer.”
(a) protocol
(b) memory chip
(c) microprocessor
(d) CD-R
(e) tape drive
40. A robot arm with articulated geometry
(a) has only one degree of freedom.
(b) has joints, similar to those in a human arm.
(c) can function in only two dimensions.
(d) can rotate and move up and down, but cannot bend.
(e) can perform only coarse movements.
41. The instantaneous output voltage of a differentiator is proportional to
(a) the peak instantaneous input voltage.
(b) the rate at which the instantaneous input voltage changes.
(c) the accumulated input voltage as a function of time.
(d) the difference between the instantaneous voltages of the two input signals.
(e) the sum of the instantaneous voltages of the two input signals.
42. What types of devices require particular care in handling, so they are not destroyed by
electrostatic discharges that can build up on a technician’s body?
(a) Vacuum tubes
(b) Ferrite resistors
(c) Ceramic capacitors
(d) MOS components
(e) Rectifier diodes
43. According to Isaac Asimov’s rules for the behavior of robots, a robot must not injure, or allow
the injury of, any human,
(a) unless the robot is forced to prevent its own destruction.
(b) unless the human is committing a crime.
618 Test: Part Four

(c) unless the human is trying to turn off the robot’s power supply.
(d) unless it is the result of an accident.
(e) under any circumstances.
44. Computer data speed is typically measured in
(a) kilobits, megabits, and gigabits.
(b) kilobits per second, megabits per second, and gigabits per second.
(c) kilobytes, megabytes, and gigabytes.
(d) kilobytes per second, megabytes per second, and gigabytes per second.
(e) any of the above.
45. Doppler radar is useful for measuring or estimating
(a) the frequency of a sine wave that is modulated with a complex signal.
(b) the wind speed in the funnel cloud of a tornado.
(c) the distance between a robot gripper and a tool or object to be manipulated.
(d) the depth of the ocean at a particular location.
(e) the direction from which a thunderstorm is coming.
46. A device that translates a 30-kHz ac voltage into ultrasonic waves by producing stress on a
crystal, thereby causing the crystal to vibrate, is an example of
(a) an electromechanical loudspeaker.
(b) a passive pressure sensor.
(c) a dynamic transducer.
(d) an inductive proximity sensor.
(e) a piezoelectric transducer.
47. Fill in the blank in the following sentence to make it true: “A
antenna is a vertical
radiator, usually measuring λ/4, elevated above the surface of the earth, and operated against a
system of λ/4 horizontal or slightly drooping radials.”
(a) dipole
(b) coaxial
(c) collinear
(d) ground-plane
(e) vertizontal
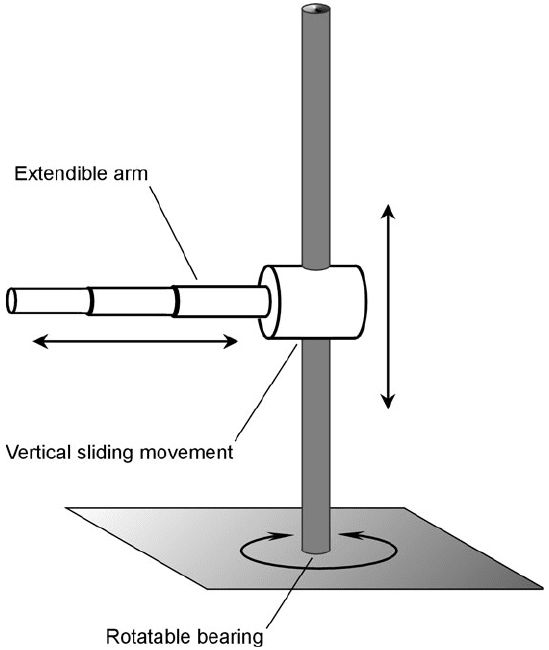
48. Figure Test4-3 shows a robotic system that employs
(a) Cartesian coordinate geometry.
(b) spherical coordinate geometry.
(c) polar coordinate geometry.
(d) cylindrical coordinate geometry.
(e) Riemannian coordinate geometry.
Test: Part Four 619
49. A satellite in a LEO system is usually placed in
(a) an equatorial orbit.
(b) a geosynchronous orbit.
(c) a retrograde orbit.
(d) a polar orbit.
(e) an orbit midway between the earth and the orbit of the moon.
50. Sound waves in the atmosphere consist of
(a) rotating magnetic fields.
(b) alternating electric fields.
(c) variable electron beams.
(d) moving molecules.
(e) rotating electron orbits within atoms.
620 Test: Part Four
Test 4-3 Illustration for
Part 4 Test
Question 48.