Gibilisco S. Teach Yourself Electricity and Electronics
Подождите немного. Документ загружается.

speed is constant for a wide range of mechanical turning resistances. Stepper motors can be con-
trolled using microcomputers. This type of motor is especially well suited for point-to-point mo-
tion. Complicated, intricate tasks can done by computer-controlled robots using stepper motors.
Selsyn
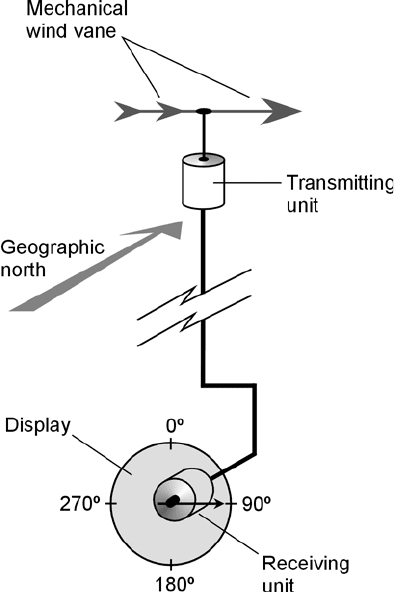
A selsyn is an indicating device that shows the direction in which an object is oriented. It consists of a
transmitting unit and a receiving (or indicator) unit. As the shaft of the transmitting unit rotates, the
shaft of the receiving unit, which is a stepper motor, follows along exactly. A common application is as
a direction indicator for a wind vane (Fig. 30-4). When the wind vane rotates, the indicator unit shaft
moves through the same number of angular degrees as the transmitting unit shaft. A selsyn for azimuth
(compass) bearings has a range of 0° to 360°. A selsyn for elevation bearings has range of 0° to 90°.
A synchro is a selsyn used for the control of mechanical devices. Synchros are well suited for ro-
botic teleoperation, or remote control. Some synchros are programmable. The operator inputs a num-
ber into the generator, and the receiver changes position accordingly. Synchros are commonly used as
rotators and direction indicators for directional communications antennas such as the Yagi or dish.
Electric Generator
An electric generator is constructed in much the same way as an ac motor, although it functions in
the opposite sense. Some generators can also be used as motors; devices of this type are called
motor/generators.
Displacement Transducers 521
30-4 A selsyn can be used to
remotely indicate the
direction in which a
mechanical device is
pointed.
A typical generator produces ac from the mechanical rotation of a coil in a strong magnetic
field. Alternatively, a permanent magnet can be rotated within a coil of wire. The rotating shaft can
be driven by a gasoline engine, a steam turbine, a water turbine, a windmill, or even by human
power. A commutator can be used with a generator to produce pulsating dc output, which can be
filtered to obtain pure dc for use with electronic equipment.
Small portable gasoline-powered generators, capable of delivering a few kilowatts, can be pur-
chased in department stores or home-and-garden stores. Larger generators, which usually burn
propane or methane (“natural gas”), allow homes or buildings to keep their electrical power in the
event of an interruption in the utility. The largest generators are found in power plants, and can pro-
duce many kilowatts.
Small generators can be used in synchro systems. These specialized generators allow remote
control of robotic devices. A generator can be used to measure the speed at which a vehicle or rolling
robot moves. The shaft of the generator is connected to one of the wheels, and the generator output
voltage and frequency vary directly with the angular speed of the wheel. This is an example of a
tachometer, a device familiar to people with automotive experience.
Optical Encoder
In digital radios, frequency adjustment is done in discrete steps. A typical increment is 10 Hz for
shortwave radios and 200 kHz for FM broadcast radios. An alternative to mechanical switches or
522 Transducers, Sensors, Location, and Navigation
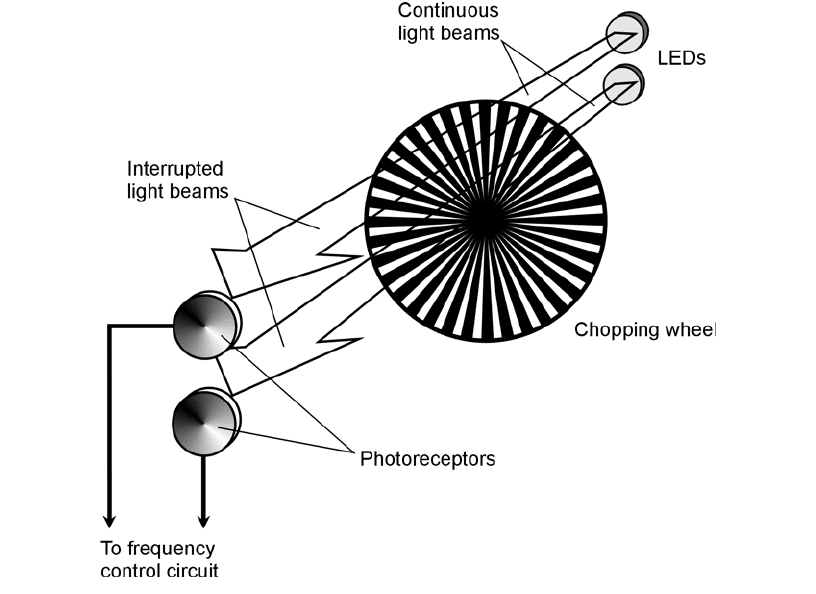
30-5 An optical encoder uses LEDs and photodetectors to sense the direction
and extent of shaft rotation.
gear-driven devices, which wear out with time, is the optical encoder, also called the optical shaft
encoder.
An optical encoder consists of two LEDs, two photodetectors, and a device called a chopping
wheel. The LEDs shine on the photodetectors through the wheel. The wheel has radial bands, alter-
nately transparent and opaque (Fig. 30-5). The wheel is attached to the tuning shaft, which is at-
tached to a large knob. As the tuning knob is rotated, the light beams are interrupted. Each
interruption causes the frequency to change by a specified increment. The difference between “fre-
quency up” and “frequency down” (clockwise and counterclockwise shaft rotation, respectively) is
determined according to which photodetector senses each sequential beam interruption first.
Detection and Measurement
A sensor employs one or more transducers to detect and/or measure phenomena such as tempera-
ture, humidity, barometric pressure, texture, proximity, and the presence of certain substances.
Capacitive Pressure Sensor
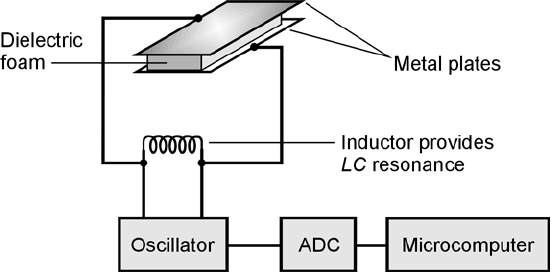
A capacitive pressure sensor is shown in Fig. 30-6. Two metal plates are separated by a layer of dielec-
tric (electrically insulating) foam, forming a capacitor. This component is connected in parallel with
an inductor. The resulting inductance/capacitance (LC ) circuit determines the frequency of an os-
cillator. If an object strikes the sensor, the plate spacing momentarily decreases. This increases the
capacitance, causing a drop in the oscillator frequency. When the object moves away from the trans-
ducer, the foam springs back, the plates return to their original spacing, and the oscillator frequency
returns to normal.
The output of a capacitive pressure sensor can be converted to digital data using an analog-to-
digital converter (ADC). This signal can be sent to a microcomputer such as a robot controller. Pres-
sure sensors can be mounted in various places on a mobile robot, such as the front, back, and sides.
Then, for example, physical pressure on the sensor in the front of the robot can send a signal to the
controller, which tells the machine to move backward.
A capacitive pressure sensor can be fooled by massive conducting or semiconducting objects in
its vicinity. If such a mass comes near the transducer, the capacitance may change even if direct con-
tact is not made. This phenomenon is known as body capacitance. When the effect must be avoided,
an elastomer device can be used for pressure sensing.
Detection and Measurement 523
30-6 A capacitive pressure
sensor. When force is
applied, the spacing
between the plates
decreases, causing the
capacitance to increase
and the oscillator
frequency to go down.
Elastomer
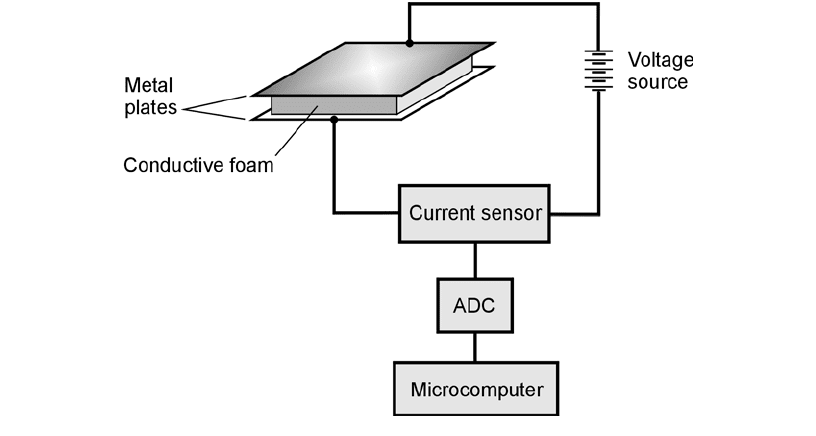
An elastomer is a flexible substance resembling rubber or plastic that can be used to detect the pres-
ence or absence of mechanical pressure. Figure 30-7 illustrates how an elastomer can be used to de-
tect, and locate, a pressure point. The elastomer conducts electricity fairly well, but not perfectly. It
has a foam-like consistency, so that it can be compressed. Conductive plates are attached to the pad.
When pressure appears at some point in the elastomer pad, the material is compressed, and this
lowers its electrical resistance. This is detected as an increase in the current between the plates. The
greater the pressure becomes, the more the elastomer is compressed, and the greater is the increase
in the current. The current-change data can be sent to a microcomputer such as a robot controller.
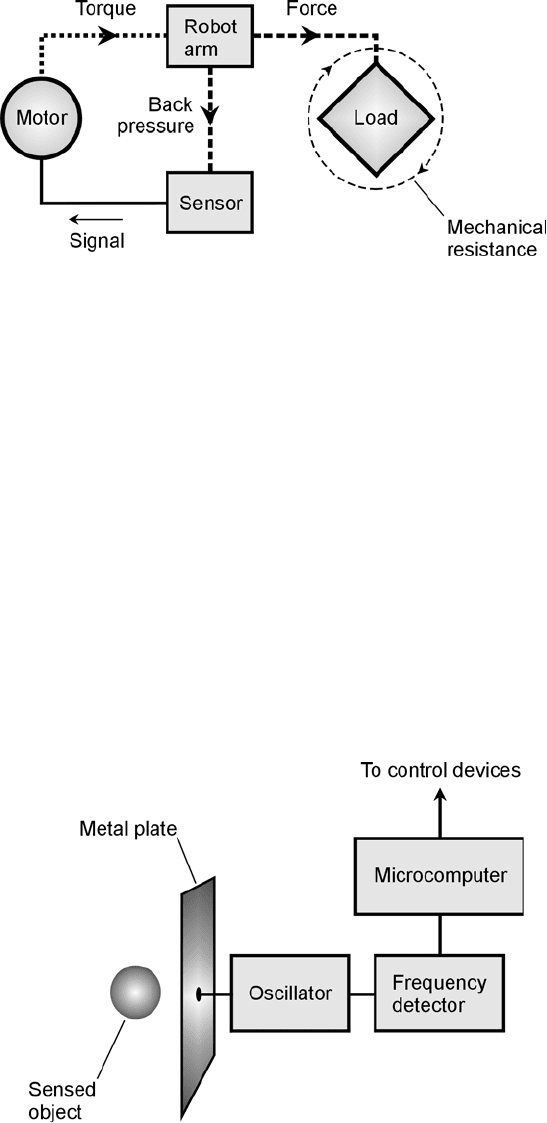
Back-Pressure Sensor
A motor produces a measurable pressure that depends on the torque being applied. A back-pressure
sensor detects and measures the torque that the motor is applying at any given time. The sensor pro-
duces a signal, usually a variable voltage, that increases as the torque increases. Figure 30-8 is a func-
tional block diagram of a back-pressure sensor.
Back-pressure sensors are used to limit the force applied by robot grippers, arms, drills, ham-
mers, or other end effectors. The back voltage, or signal produced by the sensor, reduces the torque
applied by the motor. This can prevent damage to objects being handled by the robot. It also helps
to ensure the safety of people working around the robot.
Capacitive Proximity Sensor
A capacitive proximity sensor uses an RF oscillator, a frequency detector, and a metal plate connected
into the oscillator circuit (Fig. 30-9). The oscillator is designed so that a change in the capacitance
524 Transducers, Sensors, Location, and Navigation
30-7 An elastomer pressure sensor detects applied force without
unwanted capacitive effects.
of the plate, with respect to the environment, causes the oscillator frequency to change. This change
is sensed by the frequency detector, which sends a signal to a microcomputer or robot controller.
Substances that conduct electricity to some extent, such as metal, saltwater, and living tissue,
are sensed more easily by capacitive transducers than are materials that do not conduct, such as dry
wood, plastic, glass, or dry fabric.
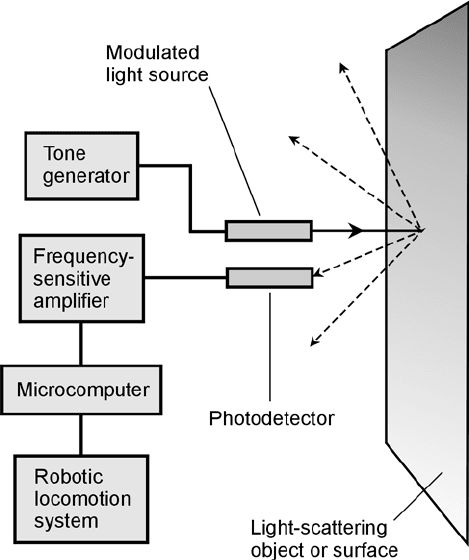
Photoelectric Proximity Sensor
Reflected light can provide a way for a mobile robot to tell if it is approaching something. A photo-
electric proximity sensor uses a light-beam generator, a photodetector, a frequency-sensitive amplifier,
and a microcomputer (Fig. 30-10).
The light beam reflects from the object and is picked up by the photodetector. The light beam
is modulated at a certain frequency, say 1000 Hz. The amplifier responds only to light modulated
at that frequency. This prevents false imaging that can otherwise be caused by lamps or sunlight.
(Such light sources are unmodulated, and will not actuate a sensor designed to respond only to
modulated light.) If the robot is approaching an object, its controller senses that the reflected, mod-
ulated beam is getting stronger. The robot can then steer clear of the object.
Detection and Measurement 525
30-8 A back-pressure sensor
governs the force
applied by a robot arm
or other mechanical
device.
30-9 A capacitive proximity
sensor can detect
nearby conducting or
semiconducting
objects.
This method of proximity sensing does not work for objects that do not reflect light, or for win-
dows or mirrors approached at a sharp angle. In these scenarios, the light beam is not reflected back
toward the photodetector, so the object is invisible.
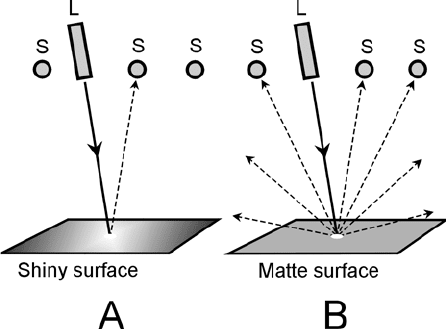
Texture Sensor
Texture sensing is the ability of a machine to determine whether a surface is shiny or rough (matte).
Basic texture sensing involves the use of a laser and several light-sensitive sensors.
Figure 30-11 shows how a laser (L) and sensors (S) can be used to tell the difference be-
tween a shiny surface (at A) and a rough or matte surface (at B). The shiny surface, such as the
polished hood of a car, reflects light at the incidence angle only. But the matte surface, such as
a sheet of paper, scatters light in all directions. The shiny surface reflects the beam back entirely
to the sensor in the path of the beam whose reflection angle equals its incidence angle. The
matte surface reflects the beam back to all the sensors. A microcomputer can be programmed to
tell the difference.
Certain types of surfaces can confuse the texture sensor shown in Fig. 30-11. For example, a pile
of glass marbles can be defined as shiny on a small scale but irregular on a large scale. Depending on
the diameter of the laser beam, the texture sensor might interpret such a surface as either shiny or
matte. The determination can also be affected by motion of the sensor relative to the surface. A sur-
face that is interpreted as shiny when standing still relative to the sensor might be interpreted as
matte when moving relative to the sensor.
526 Transducers, Sensors, Location, and Navigation
30-10 A photoelectric
proximity sensor.
Modulation of the
light beam allows the
device to distinguish
between sensor-
generated light and
background
illumination.
Location Systems
Transducers and sensors can operate over long distances. The above-described devices are intended
mainly for short-range applications (with the exception of RF antennas). In this section, a few
medium-range and long-range applications of transducers and sensors are described. These applica-
tions fall into the broad category of location systems.
Radar
The term radar is derived from the words radio detection and ranging. Electromagnetic (EM) waves
having certain frequencies reflect from various objects, especially if those objects contain metals or
other good electrical conductors. By ascertaining the direction(s) from which radio signals are re-
turned, and by measuring the time it takes for a pulsed beam of EM energy to travel from the trans-
mitter location to a target and back again, it is possible to pinpoint the geographic positions of
distant objects. During the Second World War in the 1940s, this property of radio waves was put to
use for the purpose of locating aircraft.
In the years following the war, it was discovered that radar can be useful in a variety of applica-
tions, such as measurement of automobile speed (by the police), weather forecasting (rain and snow
reflect radar signals), and even the mapping of the moon and the planet Venus. Radar is extensively
used in aviation, both commercial and military. In recent years, radar has also found uses in robot
guidance systems.
A complete radar set consists of a transmitter, a directional antenna with a narrow main lobe
and high gain, a receiver, and an indicator or display. The transmitter produces intense pulses of
radio microwaves at short intervals. The pulses are propagated outward in a narrow beam from the
antenna, and they strike objects at various distances. The reflected signals, or echoes, are picked up
by the antenna shortly after the pulse is transmitted. The farther away the reflecting object, or tar-
get, the longer the time before the echo is received. The transmitting antenna is rotated so that all
azimuth bearings (compass directions) can be observed.
A typical circular radar display consists of a CRT or LCD. Figure 30-12 shows the basic display
configuration. The observing station is at the center of the display. Azimuth bearings are indicated
Location Systems 527
30-11 In texture sensing,
lasers (L) and sensors
(S) analyze a shiny
surface (at A) and a
matte surface (at B).
Solid lines represent
incident light; dashed
lines represent
reflected light.
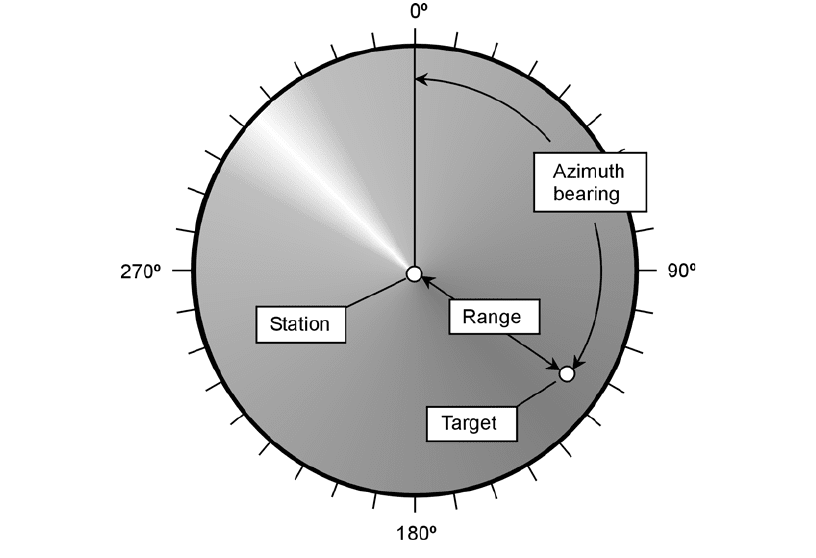
in degrees clockwise from true north, and are marked around the perimeter of the screen. The dis-
tance, or range, is indicated by the radial displacement of the echo; the farther away the target, the
farther from the display center the echo or blip. The radar display is, therefore, a set of polar coor-
dinates. In the drawing, a target is shown at an azimuth of about 125° (east-southeast). Its range is
near the maximum for the display.
The maximum range of a radar system depends on the height of the antenna above the ground,
the nature of the terrain in the area, the transmitter output power and antenna gain, the receiver
sensitivity, and the weather conditions in the vicinity. Airborne long-range radar can detect echoes
from several hundred kilometers (km) away under ideal conditions. A low-power radar system, with
the antenna at a low height above the ground, might receive echoes from only 50 to 70 km.
The fact that precipitation reflects radar echoes is a nuisance to aviation personnel, but it is in-
valuable for weather forecasting and observation. Radar has made it possible to detect and track se-
vere thunderstorms and hurricanes. A mesocyclone, which is a severe thunderstorm likely to produce
tornadoes, causes a hook-shaped echo on radar. The eye of a hurricane, and the eyewall and rain-
bands surrounding it, all show up clearly on a radar display.
Some radar sets can detect changes in the frequency of the returned pulse, thereby allowing
measurement of wind speeds in hurricanes and tornadoes. This is called Doppler radar. This type of
radar is also employed to measure the speeds of approaching or receding targets.
528 Transducers, Sensors, Location, and Navigation
30-12 A radar display. The light radial band shows the azimuth
direction in which the microwave beam is currently transmitted
and received. (Not all radar displays show this band.)
Sonar
Sonar is a medium-range method of proximity sensing. The acronym derives from the words sonic
navigation and ranging. The basic principle is simple: Bounce acoustic waves off of objects, and
measure the time it takes for the echoes to return.
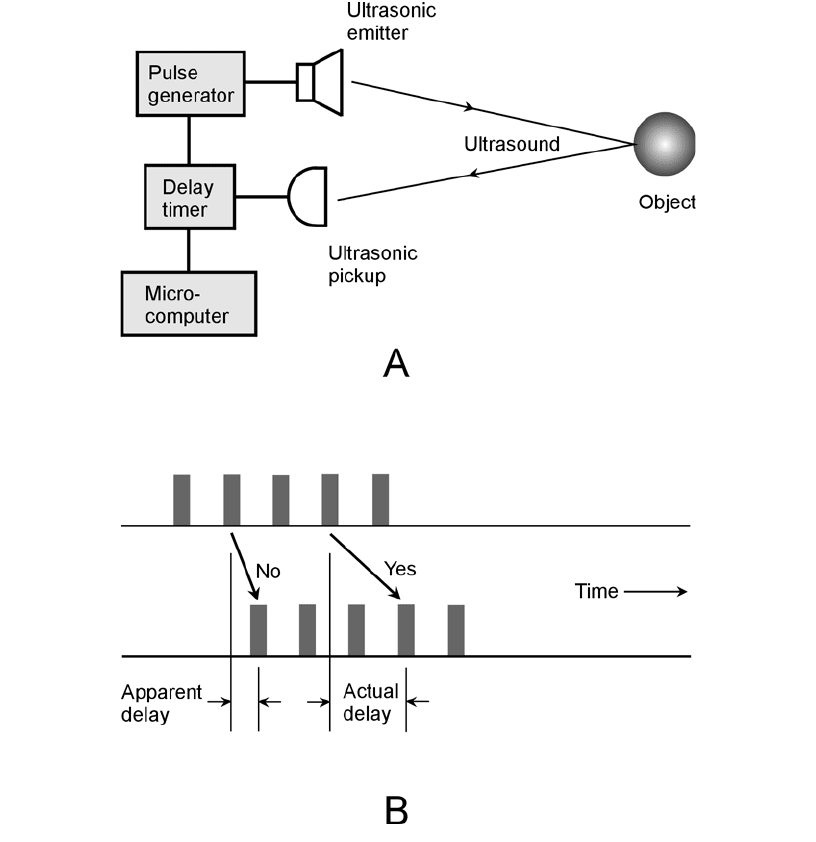
An elementary sonar system consists of an ac pulse generator, an acoustic emitter, an acoustic
pickup, a receiver, a delay timer, and an indicating device such as a numeric display, CRT, LCD, or
pen recorder. The transmitter sends out acoustic waves through the medium, usually water or air.
These waves are reflected by objects, and the echoes are picked up by the receiver. The distance to
an object is determined on the basis of the echo delay, provided the speed of the acoustic waves in
the medium is known.
A simple sonar system is diagrammed in Fig. 30-13A. A computer map can be generated on the
basis of sounds returned from various directions in two or three dimensions. This can help a mobile
robot or vessel navigate in its environment. However, the system can be fooled if the echo delay is
equal to or longer than the time interval between pulses, as shown at B. To overcome this, a com-
puter can instruct the generator to send pulses of various frequencies in a defined sequence. The
computer keeps track of which echo corresponds to which pulse.
Acoustic waves travel faster in water than in air. The amount of salt in water makes a difference
in the propagation speed when sonar is used on boats, for example, in depth finding. The density of
water can vary because of temperature differences as well. If the true speed of the acoustic waves is
not accurately known, false readings will result. In freshwater, the speed of sound is about 1400 me-
ters per second (m/s), or 4600 feet per second (ft/s). In saltwater, it is about 1500 m/s (4900 ft/s).
In air, sound travels at approximately 335 m/s (1100 ft/s).
In the atmosphere, sonar can make use of audible sound waves, but ultrasound is often used in-
stead. Ultrasound has a frequency too high to hear, ranging from about 20 kHz to more than 100
kHz. One advantage of ultrasound is that the signals will not be heard by people working around
machines equipped with sonar. Another advantage is the fact that it is less likely to be fooled by peo-
ple talking, machinery operating, and other noises. At frequencies higher than the range of human
hearing, acoustical disturbances do not normally occur as often, or with as much intensity, as they
do within the hearing range.
In its most advanced forms, sonar can rival vision systems (also called machine vision) as a means
of mapping the environment for a mobile robot or vessel. Sonar has one significant limitation: all
acoustic waves, including sound and ultrasound, require a gaseous or liquid medium in order to
propagate. Therefore, sonar is useless in outer space, which is practically a vacuum.
Signal Comparison
A machine or vessel can find its geographical position by comparing the signals from two fixed sta-
tions whose positions are known, as shown in Fig. 30-14A. By adding 180° to the bearings of the
sources X and Y, the machine or vessel (small square block) obtains its bearings as seen from the
sources (round dots). The machine or vessel can determine its direction and speed by taking two
readings separated by a certain amount of time.
In the old days, diagrams such as the one in Fig. 30-14A were actually plotted on maps by the
captains of oceangoing vessels and aircraft. Nowadays, computers do that work, with more accurate
results.
Figure 30-14B is a block diagram of an acoustic direction finder such as can be used by a mobile
robot. The receiver has a signal-strength indicator and a servo that turns a directional ultrasonic
Location Systems 529
transducer. There are two signal sources at different frequencies. When the transducer is rotated so
the signal from one source is maximum, a bearing is obtained by comparing the orientation of the
transducer with some known standard such as a magnetic compass. The same is done for the other
source. A computer determines the precise location of the robot, based on this data.
Radio Direction Finding (RDF)
A radio receiver, equipped with a signal-strength indicator and connected to a rotatable, directional
antenna, can be used to determine the direction from which signals are coming. Radio direction find-
530 Transducers, Sensors, Location, and Navigation
30-13 At A, a block diagram of medium-range sonar system. At B, a
sonar system can be confused by long delays.