Gibilisco S. Teach Yourself Electricity and Electronics
Подождите немного. Документ загружается.

Electrostatic CRT
In an electrostatic CRT, charged metal plates, rather than current-carrying coils, are used to deflect
the electron beam. When voltages appear on these deflecting plates, the beam is bent in the direction
of the electric lines of flux. The greater the voltage applied to a deflecting plate, the stronger the elec-
tric field, and the greater the extent to which the beam is deflected.
The principal advantage of an electrostatic CRT is the fact that it generates a far less intense
magnetic field than an electromagnetic CRT. This so-called extremely low frequency (ELF) energy
is a cause for concern, because it might have adverse effects on people who use CRT-equipped de-
vices, such as desktop computers, for extended periods of time. In recent years, with the evolution
of liquid crystal displays (LCDs) and plasma displays as alternatives to the CRT type of display, ELF
has become a much less significant concern.
Camera Tubes
Some video cameras use a form of electron tube that converts visible light into varying electric cur-
rents. The two most common types of camera tube are the vidicon and the image orthicon.
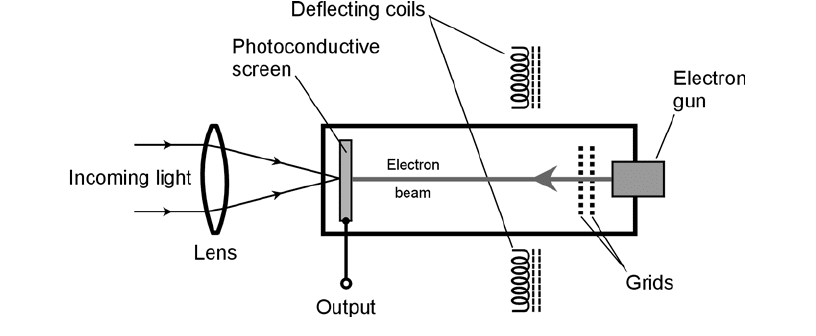
Vidicon
In the vidicon, a lens focuses the incoming image onto a photoconductive screen. An electron gun
generates a beam that sweeps across the screen as a result of the effects of deflecting coils, in a man-
ner similar to the operation of an electromagnetic CRT. The sweep in the vidicon is synchronized
with any CRT that displays the image.
As the electron beam scans the photoconductive surface, the screen becomes charged. The rate
of discharge in a certain region on the screen depends on the intensity of the visible light striking
that region. A simplified cutaway view of a vidicon tube is shown in Fig. 29-7.
The main advantage of the vidicon is its small physical size and mass. A vidicon is sensitive, but
its response can be sluggish when the level of illumination is low. This causes images to persist for a
short while, resulting in poor portrayal of fast-motion scenes.
Camera Tubes 511
29-7 Functional diagram of a vidicon.
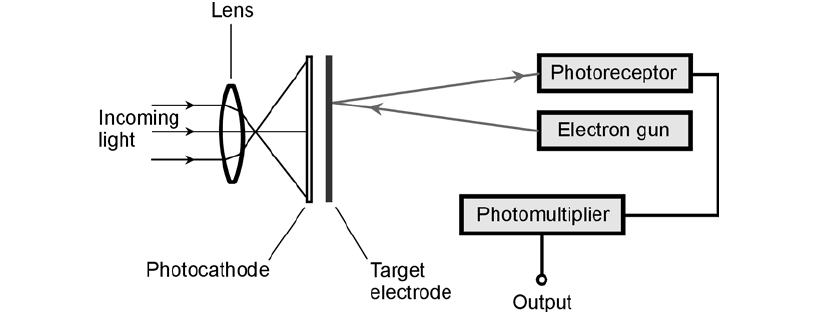
Image Orthicon
Another type of camera tube, also quite sensitive but having a quicker response to image changes, is
the image orthicon. It is constructed much like the vidicon, except that there is a target electrode be-
hind the photocathode (Fig. 29-8). When a single electron from the photocathode strikes the target
electrode, multiple secondary electrons are emitted as a result. The image orthicon thus acts as a
video signal amplifier, as well as a camera.
A fine beam of electrons, emitted from the electron gun, scans the target electrode. The second-
ary electrons cause some of this beam to be reflected back toward the electron gun. Areas of the tar-
get electrode with the most secondary electron emission produce the greatest return beam intensity,
and regions with the least emission produce the lowest return beam intensity. The greatest return
beam intensity corresponds to the brightest parts of the video image. The return beam is modulated
as it scans the target electrode and is picked up by a receptor electrode.
One significant disadvantage of the image orthicon is that it produces considerable noise in ad-
dition to the signal output. But when a fast response is needed and the illumination ranges from
dim to very bright, the image orthicon is the camera tube of choice.
Photomultiplier
A photomultiplier is a vacuum tube that generates a variable current depending on the intensity of
the light that strikes it. It multiplies its own output, thereby obtaining high sensitivity. Photomulti-
pliers can be used to measure light intensity at low levels.
The photomultiplier consists of a photocathode, which emits electrons in proportion to the in-
tensity of the light striking it. These electrons are focused into a beam, and this beam strikes an elec-
trode called a dynode. The dynode emits several secondary electrons for each electron that strikes it.
The resulting beam is collected by the anode.
A photomultiplier can have several dynodes, resulting in high gain. The extent to which the
sensitivity can be increased by cascading dynodes is limited by the amount of background electron
emission or dark noise from the photocathode.
Dissector
A dissector, also known as an image dissector, is a form of photomultiplier in which the light is fo-
cused by a lens onto a translucent photocathode. This surface emits electrons in proportion to the
512 Electron Tubes
29-8 Functional diagram of an image orthicon.
light intensity. The electrons from the photocathode are directed to a barrier containing a small
aperture. The vertical and horizontal deflection plates, supplied with synchronized scanning volt-
ages, move the beam from the photocathode across the aperture. The electron stream passing
through the aperture is modulated depending on the light and dark nature of the image.
The image resolution of the dissector tube depends on the size of the aperture. The smaller the
aperture, the sharper the image, down to a certain limiting point. However, there is a limit to how
small the aperture can be, while still allowing enough electrons to pass, and avoiding the generation
of interference patterns. The image dissector tube produces very little dark noise, and this allows for
excellent sensitivity.
Tubes for Use above 300 MHz
Specialized vacuum tubes are required for RF operation at frequencies above 300 MHz. These
bands are known as ultrahigh frequency (UHF) band, which ranges from 300 MHz to 3 GHz, and
the microwave band, which ranges from 3 GHz up. The magnetron and the Klystron are examples of
tubes that are used to generate and amplify signals at these frequencies.
Magnetron
A magnetron contains a cathode and a surrounding anode. The anode is divided into sections, or
cavities, by radial barriers. The output is taken from an opening in the anode, and passes into a
waveguide that serves as a transmission line for the RF output energy.
The cathode is connected to the negative terminal of a high-voltage source, and the anode is
connected to the positive terminal. Therefore, electrons flow radially outward. A magnetic field is
applied lengthwise through the cavities. As a result, the electron paths are bent into spirals. The elec-
tric field produced by the high voltage, interacting with the longitudinal magnetic field and the ef-
fects of the cavities, causes the electrons to bunch up into clouds. The swirling movement of the
electron clouds causes a fluctuating current in the anode. The frequency depends on the shapes and
sizes of the cavities. Small cavities result in the highest oscillation frequencies; larger cavities produce
oscillation at relatively lower frequencies.
A magnetron can generate more than 1 kW of RF power at a frequency of 1 GHz. As the fre-
quency increases, the realizable power output decreases. At 10 GHz, a typical magnetron generates
about 20 W of RF power output.
Klystron
A Klystron has an electron gun, one or more cavities, and a device that modulates the electron
beam. There are several different types. The most common are the multicavity Klystron and the re-
flex Klystron.
In a multicavity Klystron, the electron beam is velocity-modulated in the first cavity. This
causes the density of electrons (the number of particles per unit volume) in the beam to change
as the beam moves through subsequent cavities. The electrons tend to bunch up in some regions
and spread out in other regions. The intermediate cavities increase the magnitude of the electron
beam modulation, resulting in amplification. Output is taken from the last cavity. Peak power
levels in some multicavity Klystrons can exceed 1 MW (10
6
W), although the average power is
much less.
A reflex Klystron has a single cavity. A retarding field causes the electron beam to periodically re-
verse direction. This produces a phase reversal that allows large amounts of energy to be drawn from
Tubes for Use above 300 MHz 513
the electrons. A typical reflex Klystron can produce signals on the order of a few watts at frequen-
cies of 300 MHz and above.
Quiz
Refer to the text in this chapter if necessary. A good score is at least 18 correct. Answers are in the
back of the book.
1. A major difference between a triode tube and an N-channel FET is the fact that
(a) triodes work with lower signal voltages.
(b) triodes are more compact.
(c) triodes need higher power-supply voltages.
(d) triodes don’t need filaments.
2. The control grid of a vacuum tube is the electrical counterpart of the
(a) source of a MOSFET.
(b) collector of a bipolar transistor.
(c) anode of a diode.
(d) gate of an FET.
3. In a tetrode tube, the charge carriers are
(a) free electrons, which pass among the electrodes.
(b) holes, which are conducted within the electrodes.
(c) holes or electrons, depending on whether the device is P type or N type.
(d) nuclei of whatever elemental gas happens to exist in the tube.
4. Which factor is most significant in limiting the maximum frequency at which a tube can
operate?
(a) The power-supply voltage
(b) The capacitance among the electrodes
(c) The physical size of the tube
(d) The current passing through the filament
5. In a tube with a directly heated cathode,
(a) the filament is separate from the cathode.
(b) the grid is connected to the filament.
(c) the filament serves as the cathode.
(d) there is no filament.
6. In a tube with a cold cathode,
(a) the filament is separate from the cathode.
(b) the grid is connected to the filament.
(c) the filament serves as the cathode.
(d) there is no filament.
514 Electron Tubes
7. A screen grid enhances tube operation by
(a) increasing the gain, helping the circuit to oscillate more easily.
(b) decreasing the plate voltage required to produce oscillation.
(c) minimizing the risk that a tube amplifier will break into oscillation.
(d) pulling excess electrons from the plate.
8. A tube with three grids is called a
(a) triode.
(b) tetrode.
(c) pentode.
(d) hexode.
9. A tube with four grids is called a
(a) triode.
(b) tetrode.
(c) pentode.
(d) hexode.
10. An advantage of a grounded-grid RF power amplifier over a grounded-cathode RF power
amplifier is the fact that the grounded-grid circuit
(a) has excellent sensitivity.
(b) exhibits high input impedance.
(c) produces little or no noise in the input.
(d) is more stable.
11. A heptode tube has
(a) one plate.
(b) two plates.
(c) three plates.
(d) four plates.
12. The electron gun in a CRT is another name for its
(a) cathode.
(b) anode.
(c) control grid.
(d) screen grid.
13. The electron beam in an electrostatic CRT is bent by
(a) magnetic fields produced by current-carrying coils.
(b) electric fields produced by charged electrodes.
(c) a variable voltage on the screen grid.
(d) visible light striking the electrodes.
Quiz 515
14. A grounded-grid RF power amplifier
(a) requires more driving power, for a given RF power output, than a grounded-cathode RF
power amplifier.
(b) requires less driving power, for a given RF power output, than a grounded-cathode RF
power amplifier.
(c) oscillates at a more stable frequency than a grounded-cathode RF power amplifier.
(d) oscillates at a less stable frequency than a grounded-cathode RF power amplifier.
15. In a Klystron, the electron-beam density varies as a result of
(a) amplitude modulation.
(b) pulse modulation.
(c) velocity modulation.
(d) frequency modulation.
16. A vidicon camera tube is noted for its
(a) poor signal-to-noise ratio.
(b) large size and heavy weight.
(c) slow response to image movement in dim light.
(d) excellent selectivity and electrical ruggedness.
17. The plate in a tetrode tube is normally connected to
(a) a positive dc power-supply voltage.
(b) a negative dc power-supply voltage.
(c) electrical ground.
(d) RF ground.
18. The screen grid in a tetrode tube is normally connected to
(a) a positive dc power-supply voltage.
(b) a negative dc power-supply voltage.
(c) electrical ground.
(d) RF ground.
19. Which of the following is most suitable for measuring the intensity of dim light?
(a) A triode gas-filled tube
(b) A photomultiplier tube
(c) An electrostatic CRT
(d) An electromagnetic CRT
20. In a dissector tube, the aperture size is directly related to the
(a) operating voltage.
(b) signal-to-noise ratio.
(c) response speed.
(d) image resolution.
516 Electron Tubes
IN THIS CHAPTER, YOU’LL LEARN ABOUT ELECTRONIC DEVICES THAT CONVERT ENERGY FROM ONE
form to another, devices that can detect phenomena and measure their intensity, systems that can
help you find out where you are (or where some other object is), and devices that facilitate naviga-
tion for vessels such as ships, aircraft, and robots.
Wave Transducers
In electronics, wave transducers convert ac or dc into acoustic or electromagnetic (EM) waves. They
can also convert these waves into ac or dc signals.
Dynamic Transducer for Sound
A dynamic transducer is a coil-and-magnet device that translates mechanical vibration into varying
electrical current, and can also do the reverse. The most common examples are the dynamic micro-
phone and the dynamic speaker.
Figure 30-1 shows a functional diagram of a dynamic transducer. A diaphragm is attached to a
coil that is mounted so it can move back and forth rapidly along its axis. A permanent magnet is
placed inside the coil. Sound waves cause the diaphragm to move; this moves the coil, which causes
fluctuations in the magnetic field within the coil. The result is ac output from the coil, having the
same waveform as the sound waves that strike the diaphragm.
If an audio signal is applied to the coil, it generates a magnetic field that produces forces on the
coil. This causes the coil to move, pushing the diaphragm back and forth, creating acoustic waves in
the surrounding medium.
Electrostatic Transducer for Sound
An electrostatic transducer takes advantage of the forces produced by electric fields. Two metal plates,
one flexible and the other rigid, are placed parallel to each other and close together (Fig. 30-2).
In an electrostatic pickup, incoming sound waves vibrate the flexible plate. This produces small,
rapid changes in the spacing, and therefore the capacitance, between the two plates. A dc voltage is
517
30
CHAPTER
Transducers, Sensors,
Location, and Navigation
Copyright © 2006, 2002, 1997, 1993 by The McGraw-Hill Companies, Inc. Click here for terms of use.

applied between the plates. As the interplate capacitance varies, the electric field intensity between
them fluctuates. This produces variations in the current through the primary winding of the trans-
former. Audio signals appear across the secondary.
In an electrostatic emitter, fluctuating currents in the transformer produce changes in the volt-
age between the plates. This results in electrostatic field variations, pulling and pushing the flexible
plate in and out. The motion of the flexible plate produces sound waves.
Electrostatic transducers can be used in most applications where dynamic transducers are em-
ployed. Advantages of electrostatic transducers include light weight and good sensitivity. The rela-
tive absence of magnetic fields can also be an asset in certain situations.
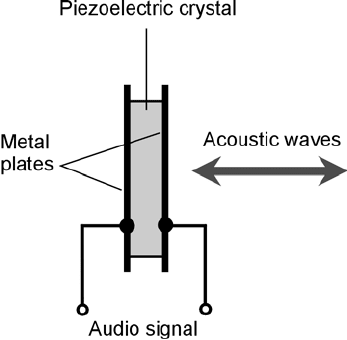
Piezoelectric Transducer for Sound and Ultrasound
Figure 30-3 shows a piezoelectric transducer. This device consists of a crystal of quartz or ceramic ma-
terial, sandwiched between two metal plates. When sound waves strike one or both of the plates, the
metal vibrates. This vibration is transferred to the crystal. The crystal generates weak electric cur-
rents when subjected to this mechanical stress. Therefore, an ac voltage develops between the two
metal plates, with a waveform similar to that of the sound.
If an ac signal is applied to the plates, it causes the crystal to vibrate in sync with the current.
The metal plates vibrate also, producing an acoustic disturbance.
Piezoelectric transducers can function at higher frequencies than can dynamic or electrostatic
transducers. For this reason, they are favored in ultrasonic applications, such as intrusion detectors
and alarms.
518 Transducers, Sensors, Location, and Navigation
30-1 Functional diagram of
a dynamic sound
transducer.
30-2 Functional diagram of
an electrostatic sound
transducer.
Transducers for RF Energy
The term radio-frequency (RF) transducer is a fancy name for an antenna. There are two basic types:
the receiving antenna and the transmitting antenna. You learned about antennas in Chap. 27.
Transducers for IR and Visible Light
Many wireless devices transmit and receive energy at IR wavelengths. Infrared energy has a fre-
quency higher than that of radio waves, but lower than that of visible light. Some wireless devices
transmit and receive their signals in the visible range, although these are encountered much less
often than IR devices.
The most common IR transmitting transducer is the infrared-emitting diode (IRED). Fluctu-
ating dc is applied to the device, causing it to emit IR rays. The fluctuations in the current consti-
tute modulation, and this produces rapid variations in the intensity of the rays emitted by the
semiconductor P-N junction. The modulation contains information, such as which channel your
television set should seek, or whether the volume is to be raised or lowered. Infrared energy can be
focused by optical lenses and reflected by optical mirrors. This makes it possible to collimate IR rays
(make them parallel) so they can be transmitted for distances up to several hundred meters.
Infrared receiving transducers resemble photodiodes or photovoltaic cells. The fluctuating IR
energy from the transmitter strikes the P-N junction of the receiving diode. If the receiving device
is a photodiode, a current is applied to it, and this current varies rapidly in accordance with the sig-
nal waveform on the IR beam from the transmitter. If the receiving device is a photovoltaic cell, it
produces the fluctuating current all by itself, without the need for an external power supply. In ei-
ther case, the current fluctuations are weak, and must be amplified before they are delivered to what-
ever equipment (television set, garage door, oven, security system, etc.) is controlled by the wireless
system. Infrared wireless devices work best on a line of sight.
Displacement Transducers
A displacement transducer measures a distance or angle traversed, or the distance or angle separating
two points. Conversely, it can convert a signal into movement over a certain distance or angle. A de-
vice that measures or produces movement in a straight line is a linear displacement transducer. If it
measures or produces movement through an angle, it is an angular displacement transducer.
Displacement Transducers 519
30-3 Functional diagram of
a piezoelectric
transducer for sound
and ultrasound.
Pointing and Control Devices
A joystick is a control device capable of producing movement, or controlling variable quantities, in
two dimensions. The device consists of a movable lever and a ball bearing within a control box. The
lever can be moved by hand up and down, and to the right and left. Joysticks are used in computer
games, for entering coordinates into a computer, and for the remote control of robots. In some joy-
sticks, the lever can be rotated, allowing control in a third dimension.
A mouse is a peripheral commonly used with personal computers. By sliding the mouse around
on a flat surface, a cursor or arrow is positioned on the display. Pushbutton switches on the top of
the unit actuate the computer to perform whatever function the cursor or arrow shows. These ac-
tions are called clicks.
A trackball resembles an inverted mouse, or a two-dimensional joystick without the lever. In-
stead of the device being pushed around on a surface, the user moves a ball bearing, causing the dis-
play cursor to move vertically and horizontally. Pushbutton switches on a computer keyboard, or on
the trackball box itself, actuate the functions.
An eraser-head pointer is a rubber button approximately 5 mm in diameter, usually placed in the
center of a computer keyboard. The user moves the cursor on the display by pushing against the
button. Clicking and double clicking are done with button switches on the keyboard.
A touch pad is a sensitive plate that is about the size of a business card. The user places an index
finger on the plate and moves the finger around. This results in intuitive movement of the display
cursor. Clicking and double clicking are done in the same way as with the trackball and eraser-head
pointer.
Electric Motor
An electric motor converts electrical energy into angular (and in some cases linear) mechanical en-
ergy. Motors can operate from ac or dc, and range in size from tiny devices used in microscopic ro-
bots to huge machines that pull passenger trains.
The basics of dc motors were discussed in Chap. 8. In a motor designed to work with ac, there
is no commutator. The alternations in the current keep the polarity correct at all times, so the shaft
does not lock up. The rotational speed of an ac motor depends on the frequency of the applied ac.
With 60-Hz ac, for example, the rotational speed is 60 revolutions per second (60 rps) or 3600 rev-
olutions per minute (3600 rpm).
When a motor is connected to a load, the rotational force required to turn the shaft increases.
The greater the required force becomes, the more power is drawn from the source.
Stepper Motor
A stepper motor turns in small increments, rather than continuously. The step angle, or extent of each
turn, varies depending on the particular motor. It can range from less than 1° of arc to a quarter of
a circle (90°). A stepper motor turns through its step angle and then stops, even if the current is
maintained. When a stepper motor is stopped with a current going through its coils, the shaft resists
external rotational force.
Conventional motors run at hundreds, or even thousands, of revolutions per minute (rpm). But
a stepper motor usually runs at much lower speeds, almost always less than 180 rpm. A stepper
motor has the most turning power when it is running at its slowest speeds, and the least turning
power when it runs at its highest speeds.
When a pulsed current is supplied to a stepper motor, the shaft rotates in increments, one step
for each pulse. In this way, a precise speed can be maintained. Because of the braking effect, this
520 Transducers, Sensors, Location, and Navigation