Gerya T. Introduction to Numerical Geodynamic Modelling
Подождите немного. Документ загружается.

7.5 Indexing of unknowns 97
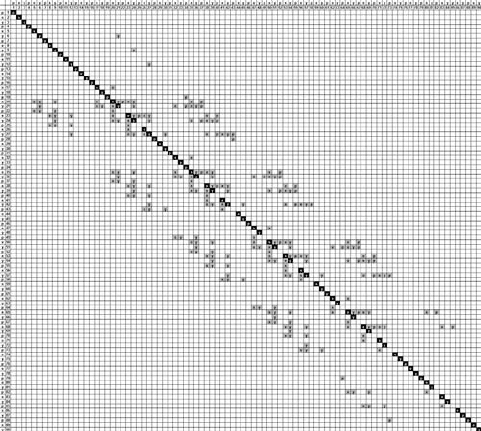
Fig. 7.16 Sparse tri-diagonal global 90 ×90 matrix corresponding to the staggered
grid shown in Fig. 7.15. Coloured rectangles correspond to non-zero coefficients.
Black rectangles are located on the main diagonal of the matrix. Note the absence
of coefficients on the main diagonal when the continuity equation is solved in
order to obtain pressure.
where in
P
, in
v
x
and in
v
y
are indices for P, v
x
and v
y
related to the given basic node
in
node
.
As one can see on Fig. 7.15, index in
P
located in the centre of a grid cell is always
bigger then the indices in
v
x
and in
v
y
for the velocity nodes surrounding this cell.
This is an important condition since pressure is obtained by solving the continuity
equation. An incompressible continuity equation does not initially contain pressure
and the solution is guaranteed by the order of processing during the inversion of
the global matrix (Fig. 7.16).
The continuity equation (Eq. (1.28)) for pressure in a given cell (cf. Fig. 7.9)
is processed after all Stokes equations (Eq. 5.18) for all surrounding v
x
-andv
y
-
nodes (cf. Figs. 7.11, 7.12) which contain pressure in the cell. For this reason, the
pressure values in the four corners of the grid (cf. pressure nodes 19, 28, 79 and 88 in
Fig. 7.15) cannot be computed from the continuity equation since these pressure
nodes are not used in the formulation of the momentum equation and are surrounded
by v
x
and v
y
nodes for which boundary conditions are formulated (cf. nodes
with underlined indices in Fig. 7.15). For these pressure nodes, some boundary
conditions (e.g. horizontal symmetry) should be used instead. Additionally, the
pressure value should be given at one of the remaining pressure nodes (cf. P-node
98 Numerical solutions of the equations
34 in Fig. 7.15) of the grid such that absolute pressure values can be defined
through the pressure gradients present in the momentum equation. We thus need to
formulate boundary conditions for five pressure nodes.
The idea about obtaining a solution for pressure by formulating an equation that
does not contain pressure may sound bizarre. Let us just convince ourselves on a
simple example. We apply Gaussian elimination (Eqs. 3.12–3.18) to the analogue
system of three equations with variables v
x
, v
y
and P having the global indices 1,
2 and 3 respectively
equation A1 (formulated for v
x
): 2v
x
+ 4v
y
+ 2P = 10,
equation A2 (formulated for v
y
): 3v
x
+ 9v
y
+ 6P = 21,
equation A3 (formulated for P ): v
x
+ 3v
y
= 5.
Dividing all equations by a number to normalise the coefficient of v
x
,weget
equation B1: v
x
+ 2v
y
+ P = 5,
equation B2: v
x
+ 3v
y
+ 2P = 7,
equation B3: v
x
+ 3v
y
= 5.
Eliminating v
x
by subtracting equation B1 from B2 and B3 yields
equation B1: v
x
+ 2v
y
+ P = 5,
equation C2: v
y
+ P = 2,
equation C3: v
y
− P = 0.
Note that after the elimination operation, P indeed appears in equation C3.
Eliminating v
y
by subtracting equation C2 from C3 yields
equation B1: v
x
+ 2v
y
+ P = 5,
equation C2: v
y
+ P = 2,
equation D3: −2P =−2,
Obtaining the solution for P from equation D3
P =−2/(−2) = 1.
Obtaining solution for v
y
from equation C2
v
y
= 2 − P = 2 −1 = 1.
Obtaining the solution for v
x
from equation B1
v
x
= 5 − 2v
y
− P = 5 − 2 − 1 = 2.
7.5 Indexing of unknowns 99
So it works and we obtained all the required solutions, including one for P by
the Gaussian elimination (we could also have inferred this from the fact that
we have three equations for the three unknowns v
x
, v
y
and P). Of course, it
would be impossible to apply (without reordering of equations and re-indexing of
unknowns) the same Gaussian elimination approach if the order of global indices
(and respectively equations) was inverted, i.e.
equation 1 (formulated for P ): 3v
y
+ v
x
= 5,
equation 2 (formulated for v
y
): 6P + 9v
y
+ 3v
x
= 21,
equation 3 (formulated for v
x
): 2P + 4v
y
+ 2v
x
= 10.
It should be mentioned, however, that more advanced direct solvers (including ‘\’
command of MATLAB) have internal re-ordering procedures that allow one to
obtain solutions in the latter case as well.
An alternative staggered grid structure uses ghost velocity nodes to formulate
boundary condition equations for v
x
and v
y
velocity components (Fig. 7.17). These
equations are not explicitly added to the global matrix and therefore the respective
unknowns for the ghost nodes are not indexed. Instead, these boundary condition
equations are used in an implicit manner by taking them into account while dis-
cretising the momentum and continuity equations for the internal nodes of the grid
located next to the ghost nodes. Values of v
x
and v
y
velocities in the ghost nodes are
recovered from the boundary condition equations after obtaining a global solution
for internal nodes. The manner of indexing unknowns is shown in Fig. 7.17 and
again is based on a convention that relates staggered nodes to (part of) the basic
nodes of the grid, numbered as
in
node
= (j −1) ×(N
y
− 1) +i,
where in
node
is the index for the given node, i and j are indices for the vertical
and horizontal gridlines intersecting at the considered node (Fig. 7.17). Note that
only (N
x
− 1) ×(N
y
− 1) basic nodes are numbered. Unknowns attached for each
numbered basic node are indexed respectively from 1 to (N
x
− 1) ×(N
y
− 1) ×3
according to the increasing basic node index
in
v
x
= 3 × in
node
− 2,
in
v
y
= 3 × in
node
− 1,
in
P
= 3 × in
node
.
This way of indexing again ensures that the index for pressure in a cell is bigger than
the indices for all the velocities surrounding the cell. The main advantage of this
staggered grid structure is that there is a smaller number of unknowns in the global
matrix equal to (N
x
− 1) × (N
y
− 1) × 3. In addition, the boundary condition for

100 Numerical solutions of the equations
Fig. 7.17 Indexing of unknowns (P, v
x
and v
y
)for6×5 2D staggered grid with
the use of ‘ghost velocity nodes’. Dotted lines show the relationship of the stag-
gered nodes to the basic nodes of the grid (note that only part of the nodes is
numbered). Underlined indices denote parameters for which boundary conditions
are defined. Over-lined indices correspond to the ‘ghost unknowns’, which are
introduced for the uniformity of numbering but not used in the numerical solution
(these unknowns are simply set to zero). Empty symbols correspond to the ghost
nodes where velocity boundary condition equations are defined. These boundary
condition equations are implicitly used in the numerical solution when formulat-
ing momentum and continuity equations for the internal (numbered) nodes of the
grid located next to the ghost nodes. Indices i and j correspond to the numbering
of gridlines in the vertical and horizontal directions, respectively.
pressure only needs to be defined in a single cell (see first cell in the top left corner
in Fig. 7.17). The implementation of ghost nodes, however, requires additional
programming as the formulation of the momentum and continuity equations for
the ‘near-boundary’ nodes must be done in a special manner in order to take into
account variable velocity boundary conditions.
Compared to the stream function approach (Chapter 5), the use of a pressure–
velocity formulation (also called primitive variable formulation) requires three
times more equations for the same grid resolution. The advantages are, however, that
Programming exercises and homework 101
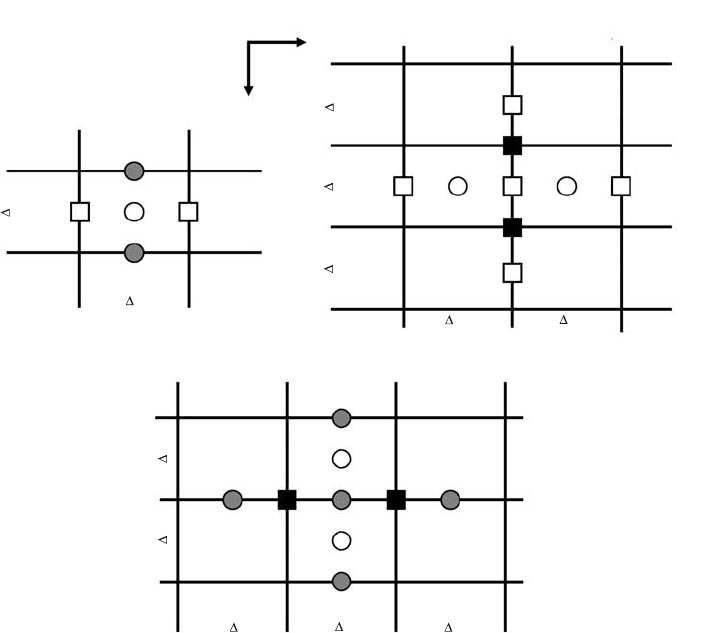
x-Stokes equation stencil
continuity equation stencil
y-Stokes equation stencil
(b)
(c)
(a)
j −1
j−1
j
j
j−1
P
P
r
r
−1
j
i
−1
i
+1
−1
i
+2
i
i
i
+1
i
i
i
y
x
j+1
j+1
j+2
y
yy
y
yy
v
yi
i
−1, j−1)
,
j
(
v
x
i
−1, j−1)
(
v
x
i
−1, j)
−1
(
v
x
j
i
,
i
i
,
,
i
j
+
1,
P
P
i
i
i
i
j
j
P
i
j
j
+
1,
i
+
1,
+1
x
j
i, j
+1
+1
)
(
v
y
x
x
x
x
x
x
j
i
,
)
(
−1
v
x
j
i
,
)
(
−1
v
v
x
v
x
j
j
r
r
i
i
,
,
j
j
i
,
)
)
)
(
(
i
−1, j )
v
y
(
j
i
,
j
i
,
,
,
,
−1
v
v
y
y
v
y
v
y
)
+1
+1
+1,
j)
+1
+1+1
)
j
)
(
(
(
(
(
Fig. 7.18 Stencils used for the discretisation of the continuity (a) and Stokes (b),(c)
equations on a 2D regular staggered grid for models with constant viscosity based
on the pressure–velocity formulation. Indexing of gridlines corresponds to basic
(density) nodal points. Indexing of different unknowns is made according to
Fig. 7.15.
the solution for pressure is obtained and that lower (second) order derivatives are
required compared to the fourth-order derivatives required by the stream function-
based equation (5.36).
Programming exercises and homework
Exercise 7.1
Solve the momentum and continuity equations with finite differences for the
case of constant viscosity using a pressure–velocity formulation (Eqs. (5.22),
(1.28)) on a regular staggered grid (Figs. 7.15, 7.18)of31× 21 points. Program
the numerical model for buoyancy-driven flow in a purely vertical gravity field
(g
x
= 0, g
y
= 10 m/s
2
in Eq. 5.22) for a density structure with two vertical layers
(3200 kg/m
3
and 3300 kg/m
3
for the left and right layer, respectively). The model

102 Numerical solutions of the equations
size is 1000 ×1500 km (i.e. 1 000 000 ×1 500 000 m). Use constant viscosity
η = 10
21
Pa s for the entire model.
Compose the matrix of coefficients {L}, the right-hand side vector {R} and
obtain the solution vector {S} with the direct solver (S = L\R) using relations
(7.17) and Fig. 7.15 for global indexing of the unknowns. Boundary conditions
for the velocity are free slip on all boundaries (Eq. 7.15). Boundary conditions for
pressure at the four corners is horizontal symmetry
∂P
∂x
= 0, i.e. pressure is the
same as in the neighbouring cells in the horizontal direction. Boundary condition
for pressure in the additional cell (i = 2andj = 3, Fig. 7.15)isP = 0. Do not
forget that the equations for all ghost unknowns (P =0, v
x
=0, v
x
=0) should also
be added to the matrix of coefficients {L} and right-hand side {R} (see over-lined
numbers in Fig. 7.15 for indexing of these unknowns).
The finite-difference representation of the momentum and continuity equa-
tions in 2D are formulated by analogy to Eqs. (3.20), (7.5)and(7.6) and follows
(Fig. 7.18)
η
v
x(i,j−1)
− 2v
x(i,j)
+ v
x(i,j+1)
x
2
+ η
v
x(i−1,j )
− 2v
x(i,j)
+ v
x(i+1,j )
y
2
−K
cont
P
i+1,j +1
− P
i+1,j
x
= 0, (7.18)
η
v
y(i,j−1)
− 2v
y(i,j)
+ v
y(i,j+1)
x
2
+ η
v
y(i−1,j )
− 2v
y(i,j)
+ v
y(i+1,j )
y
2
−K
cont
P
i+1,j +1
− P
i,j+1
y
=−g
y
ρ
i,j
+ ρ
i,j+1
2
, (7.19)
K
cont
v
x(i−1,j )
− v
x(i−1,j −1)
x
+
v
y(i,j−1)
− v
y(i−1,j −1)
y
= 0, (7.20)
where the scaled pressure P
=
P
K
cont
and coefficients K
cont
=
2η
x + y
are used
to ensure relatively uniform (i.e. not differing by many orders of magnitude) coef-
ficients in all equations. Similarly, both the left and right parts of all boundary
condition equations should be multiplied by a coefficient K
bond
=
4η
(
x + y
)
2
.
This scaling helps obtaining an accurate solution when direct solvers are applied for
models with large viscosities. After solving the global matrix for the velocity com-
ponents and scaled pressure P
, the unscaled pressure is computed as P = P
K
cont
.
After obtaining a solution for velocity on staggered nodes, compute the velocity
components v
x
and v
y
for the internal basic nodes of the grid (i.e. for 29 ×19 points)
by averaging velocity from surrounding staggered nodes (use the two nearest
velocity nodes for each component). Plot the results for pressure (pcolor)and
Programming exercises and homework 103
i+1, j
v
x(i, j )
v
y(i+1, j )
v
x(i+1, j )
v
y(i, j )
v
x(i, j )
v
y(i, j+1 )
v
y(i+1, j )
v
x(i, j+1 )
v
x(i, j +1)
h
s(i,j)
h
n(i+1,j)
h
n(i, j +1)
h
n(i+1, j+1)
h
s(i, j+1)
h
s(i, j)
i, j
i, j+1
h
s(i+1, j)
v
y(i, j)
ρ
ρ
ρ
ρ
i,j
∆y
∆x
x
y
∆x
∆y
∆y
∆y
∆y
∆x ∆x
∆x
j+1
j+2j+1
j
i
i+1
i
i+2
i+1
j
(b)
(a)
P
i+1, j
P
i, j+1
P
i+1, j +1
P
i+1, j+1
-
h
n(i+1, j+1)
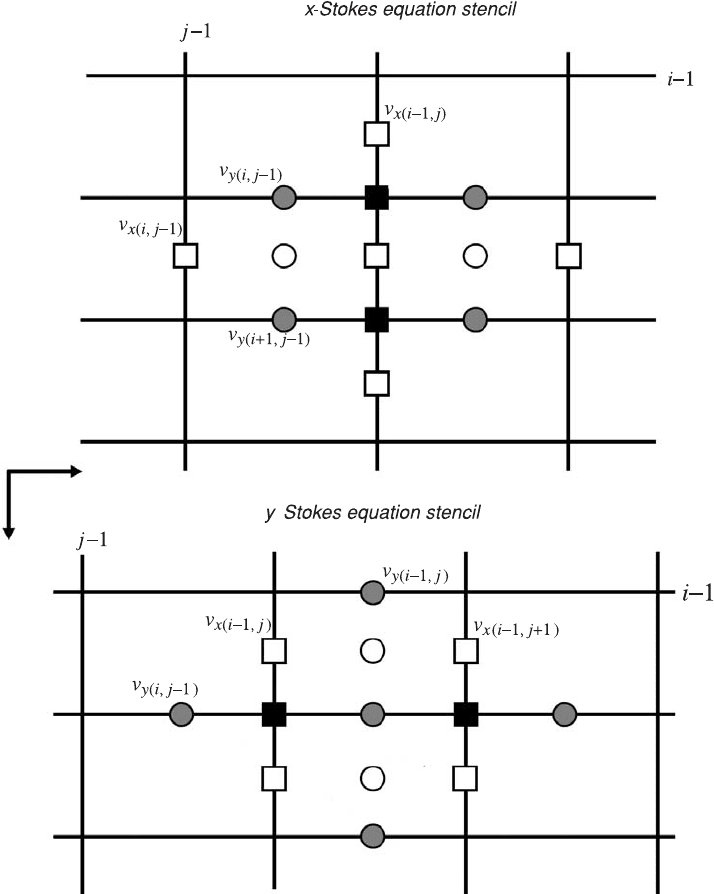
Fig. 7.19 Stencils used for the discretisation of the Stokes equations on a 2D
regular staggered grid for models with variable viscosity based on pressure–
velocity formulation. Indexing of gridlines corresponds to basic (density) nodal
points. Indexing of different unknowns is made according to Fig. 7.15.
104 Numerical solutions of the equations
velocity (quiver) on the same diagram with the vertical axis directed downward
(axis ij).
An example is in Stokes_continuity_constant_viscosity.m.
Exercise 7.2
Modify the previous example for a variable viscosity case. Use different viscosities
for the two vertical layers (10
20
Pa s and 10
22
Pa s for the left and right layer,
respectively). Define the viscosity both at the basic nodes (η
s
) and at the centres of
cells (η
n
)(Fig. 7.19). Indexing for the later one should be the same as for pressure
nodes (Fig. 7.15).
The finite-difference representation of the continuity equation is the same as
before (Eq. 7.20). Stokes equations are formulated by analogy with Eqs. (7.5)and
(7.6) as follows (Fig. 7.19)
2η
n(i+1,j +1)
v
x(i,j+1)
− v
x(i,j)
x
2
− 2η
n(i+1,j )
v
x(i,j)
− v
x(i,j−1)
x
2
+η
s(i+1,j )
v
x(i+1,j )
− v
x(i,j)
y
2
+
v
y(i+1,j )
− v
y(i+1,j −1)
xy
− η
s(i,j)
(7.21)
×
v
x(i,j)
− v
x(i−1,j )
y
2
+
v
y(i,j)
− v
y(i,j−1)
xy
− K
cont
P
i+1,j +1
− P
i+1,j
x
= 0
2η
n(i+1,j +1)
v
y(i+1,j )
− v
y(i,j)
y
2
− 2η
n(i,j+1)
v
y(i,j)
− v
y(i−1,j )
y
2
+η
s(i,j+1)
v
y(i,j+1)
− v
y(i,j)
x
2
+
v
x(i,j+1)
− v
x(i−1,j +1)
xy
(7.22)
−η
s(i,j)
v
y(i,j)
− v
y(i,j−1)
x
2
+
v
x(i,j)
− v
x(i−1,j )
xy
−K
cont
P
i+1,j +1
− P
i,j+1
y
=−g
y
ρ
i,j
+ ρ
i,j+1
2
K
cont
v
x(i−1,j )
− v
x(i−1,j −1)
x
+
v
y(i,j−1)
− v
y(i−1,j −1)
y
= 0, (7.23)
where K
cont
=
2η
min
x + y
and K
bond
=
4η
min
(
x + y
)
2
(computed with the value of
minimal viscosity in the model, η
min
) are again used for scaling the coefficients.
An example is in Stokes_continuity_variable_viscosity.m.
8
The advection equation
and marker-in-cell method
Theory: Advection equation. Solution methods for continuous and dis-
continuous variables. Eulerian schemes: upwind differences, higher-
order schemes, flux corrected transport (FCT). Lagrangian schemes:
marker-in-cell method. Runge–Kutta advection schemes. Numerical
interpolation schemes between markers and nodes.
Exercises: Programming of various advection schemes and markers
8.1 Advection equation
As we already know, the deformation of a continuum changes the spatial distribution
of physical properties. These changes can be described by the advection equation.
For a scalar function (A) at an Eulerian point, this equation is written as follows:
∂A
∂t
=−v · grad
(
A
)
(8.1a)
or in 3D,
∂A
∂t
=−v
x
∂A
∂x
− v
y
∂A
∂y
− v
z
∂A
∂z
(8.1b)
For a Lagrangian point, the following advection equation relates changes in its
coordinates with material velocities v = (v
x
,v
y
,v
z
);
Dx
i
Dt
= v
i
, (8.2a)
or in 3D,
Dx
Dt
= v
x
, (8.2b)
Dy
Dt
= v
y
, (8.2c)
Dz
Dt
= v
z
, (8.2d)
where i is a coordinate index and x
i
is a spatial coordinate.
105
106 The advection equation and marker-in-cell method
Exact solution t x/v
x
Numerical solution t = 0.5 x/v
x
t = 1.01 x/v
x
Numerical solution t = 0.25 x/v
x
t = 0
t = 10
t = 20
t = 0
t = 0
t = 0
t = 10
t = 10
t = 10
t = 20
t = 20
t = 20
(b)
(d)
(a)
(c)
v
x
= 1
v
x
= 1
v
x
= 1
v
x
= 1
x = 1
x = 1
x, m x, m
x = 1
x = 1
3100
3000
2900
2800
2700
2600
2500
2400
3100
3000
2900
2800
2700
2600
2500
2400
3100
3000
2900
2800
2700
2600
2500
2400
3100
3000
2900
2800
2700
2600
2500
2400
0 5 10 15 20 25 30 35 400 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
, kg/m
3
, kg/m
3
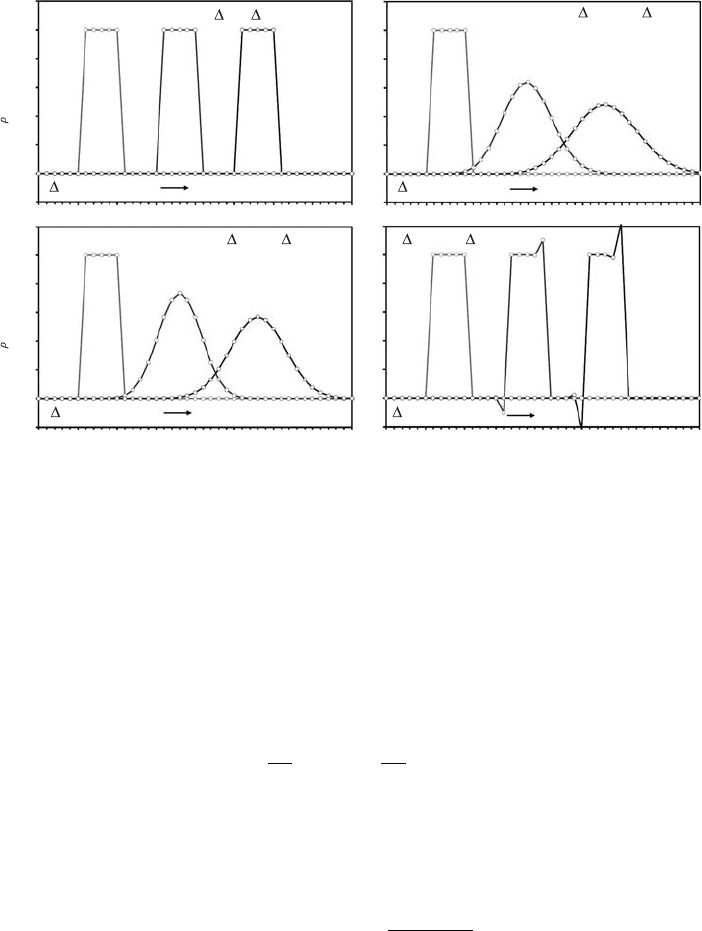
=
Fig. 8.1 Numerical solutions for the advection of a sharp density wave (i.e.
perturbation) obtained using upwind finite differences with different size time
steps, t.
8.2 Eulerian advection methods
The advection equations appear trivial, but this is an apparent simplicity. Solving
themnumericallyoftencausesproblems(headaches...).Onesuchproblemisthe
numerical diffusion of sharp gradients during advection. To illustrate the problem,
we solve
∂ρ
∂t
=−v
x
∂ρ
∂x
, (8.3)
on a regular Eulerian 1D grid with constant spacing between the nodes (x = 1),
for the case of constant material velocity (v
x
= 1) by applying upwind differences
(Fig. 8.2(a))
ρ
t+t
i
= ρ
t
i
− v
x
t
ρ
t
i
− ρ
t
i−1
x
, (8.4)
and using different values of the time step t. Figure 8.1(b) demonstrates how a
sharp density wave (i.e. perturbation) smoothes out (diffuses) during the numerical
solution of a 1D advection equation obtained using upwind finite differences.
The intensity of the numerical diffusion depends on the number of numeri-
cal steps performed and not on the absolute time of advection (Fig. 8.1(b), (c)).