Georgi, Howard. Physics 16 - Mechanics and Special Relativity (англ.)
Подождите немного. Документ загружается.


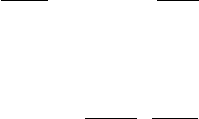
reflect this axis in the symmetry plane, we must get another principal axis with the same principal
moment, as illustrated below:
symmetry
plane
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
putative principal axis
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
reflected principal axis
(18)
Now there are two possibilities. One possibility is that the reflected axis coincides with the original.
The only way this can happen is for the original axis to be perpendicular to the symmetry plane,
in which case the theorem is true. The other possibility is that the reflected axis is different.
But then there are two distinct axes with the same principal moment (because they are physically
equivalent due to the symmetry). But then any axis in the plane formed by these two is a perfectly
good principal axis — in particular the one perpendicular to the symmetry plane — so again the
theorem is true.
8
Finishing the impulse problem
Let’s review where we are with the light rigid rectangular frame with masses at the corners, as
shown:
....................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
y
x
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
m
m
m
m
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
×
~
F
j = 1
(`/2, `
0
/2, 0)
j = 2
(`/2, −`
0
/2, 0)
j = 4
(−`/2, `
0
/2, 0)
j = 3
(−`/2, −`
0
/2, 0)
(19)
where the force acts for a very short time, and the impulse is into the paper, with the form
Z
dt
~
F = −ˆz P (20)
for positive P . Earlier, we found the center of mass to be at the origin and we found the moment
of inertia tensor for this object about its center of mass to be
~
~
I
xx
= m `
0
2
~
~
I
yy
= m `
2
~
~
I
zz
=
~
~
I
xx
+
~
~
I
yy
~
~
I
xy
=
~
~
I
xz
=
~
~
I
yz
= 0 (21)
To complete the story, we need to compute the velocity of the center of mass, and the angular
velocity about the center of mass. The velocity is easy. We know the impulse, and we know the
total mass, so we can compute the change in momentum and thus the final velocity. We’ll do this
in a minute. First we will do the interesting part and compute the angular velocity.
To do this, we first compute the impulsive torque about the center of mass — that is
Z
dt ~τ (22)
over the short period during which the force acts. This is
Z
dt (~r
2
−
~
R) ×
~
F = (`/2, −`
0
/2, 0) × (0, 0, −P ) = (P `
0
/2, P `/2, 0) (23)
where we have used the fact that the force acts for a very short time, so that ~r
2
and
~
R do not change
significantly while the force acts, and they are therefore effectively constants and can be taken
9
outside the integral in (23). This is equal to the change in angular momentum about the center of
mass, which is the final angular momentum about the center of mass.
~
L = (P `
0
/2, P `/2, 0) (24)
But the angular momentum is related to the angular velocity by
~
L =
~
~
I · ~ω (25)
Because
~
L is conserved after the force acts, (25) remains true for any time afterwards. But here
is the point. Immediately after the force acts, the body has still not had a chance to move from its
position in (19). Therefore, the moment of inertial tensor is given by (21), which implies (using
(21) and (24))
(P `
0
/2, P `/2, 0) = (m`
0
2
ω
x
, m`
2
ω
y
,
~
~
I
zz
ω
z
) (26)
which in turn implies
ω
x
=
P
2m`
0
ω
y
=
P
2m`
ω
z
= 0 (27)
This is the desired result for the angular velocity about the center of mass immediately after the
hammer blow:
~ω =
Ã
P
2m `
0
,
P
2m `
, 0
!
(28)
The directions of the vectors
~
L and ~ω are shown below (in an arbitrary relative normalization,
because they have different units).
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
~
L
~ω
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
m
m
m
m
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
×
~
F
j = 1
(`/2, `
0
/2, 0)
j = 2
(`/2, −`
0
/2, 0)
j = 4
(−`/2, `
0
/2, 0)
j = 3
(−`/2, −`
0
/2, 0)
(29)
It is amusing (though not particularly signficant) that ~ω points at mass 1.
10
(28) is very easy to understand in the limit ` = `
0
. In this case, the frame is a square, the x
and y principal moments are equal, so we can take the principal axes to be the diagonals, and (28)
simply describes rotation about the obvious diagonal, shown as the dashed line below:
....................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
y
x
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
m
m
m
m
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...................................................................................................................................................................................................................................................................................................................................................................................................................................................................
...................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
×
~
F
(30)
The final velocities
Now to get the velocities of the individual masses, we use the fact that the motion of the body is a
combination of the translational motion of the center of mass plus the rotational motion about the
center of mass. The final velocity of the center of mass is the impulse divided by the total mass:
~
V =
Ã
0, 0, −
P
4m
!
(31)
The velocity of mass j is then given by
~
V + ~ω × (~r
j
−
~
R) (32)
where ~ω is given by (28). Here they are:
~v
1
=
Ã
0, 0, −
P
4m
!
+
Ã
P
2m `
0
,
P
2m `
, 0
!
×
Ã
`
2
,
`
0
2
, 0
!
=
Ã
0, 0, −
P
4m
!
(33)
~v
2
=
Ã
0, 0, −
P
4m
!
+
Ã
P
2m `
0
,
P
2m `
, 0
!
×
Ã
`
2
, −
`
0
2
, 0
!
=
Ã
0, 0, −
3P
4m
!
(34)
11
~v
3
=
Ã
0, 0, −
P
4m
!
+
Ã
P
2m `
0
,
P
2m `
, 0
!
×
Ã
−
`
2
, −
`
0
2
, 0
!
=
Ã
0, 0, −
P
4m
!
(35)
~v
4
=
Ã
0, 0, −
P
4m
!
+
Ã
P
2m `
0
,
P
2m `
, 0
!
×
Ã
−
`
2
,
`
0
2
, 0
!
=
Ã
0, 0,
P
4m
!
(36)
12
lecture 20
Topics:
Where are we now
The free symmetric top in the space frame
Precession of tops
Nutation
Vectors in the body frame
Where are we now
The next couple of lectures are about as hard as it gets in this course. Now we are finally going
to face the music and try to figure out what happens when the angular momentum and the angular
velocity are not in the same direction. However, I am not going to be so cruel as to try to completely
solve the problem in the case of a general rigid body. We will analyze completely only the case
of the free precession of a symmetric top, with two equal moments of inertia. It not just that I am
taking pity on you. I think that it is possible to understand this in a way that is probably impossible
for the general case. Since I am interested in getting you to really understand things, rather than
just cramming facts into your head, I will focus on the simpler problem.
The animation FREETOPE.EXE shows the complicated motion of a symmetric top rotating
in space when the angular momentum is not aligned with a principal axis. Today, we are going
to understand this. I could teach you in a few minutes the formulas that describe the motion of
the free symmetric top in the space frame. But my personal view is that physics is more than a
sterile collection of equations and I don’t find complicated collections of equations very satisfying.
Instead, I am going to spend most of this lecture on it. Our derivation will be slick, and I hope that
you will find it so simple that you can easily reproduce it yourself, though you may find yourself
wondering what happened. Beginning at the end of today’s lecture and finishing next time, we will
approach the problem again in a more mathematical way. I am hoping that seeing both of them
and some animations will give you some real intuition into what is going on.
The free symmetric top in the space frame
Suppose that a rigid body with two equal principal moments (this makes it a symmetric top) is
floating out in space, and is rotating freely about its center of mass. Because there are no external
torques on the system, the angular momentum
~
L is conserved. If
~
L points along a principal axis
of the body, then the angular velocity vector ~ω is parallel to
~
L and it also remains constant. The
interesting mathematical question is what happens to ~ω when it is not parallel to
~
L. The physical
question is then what the resulting motion looks like!
You should not be surprised that the key is the connection between the angular momentum and
the angular velocity through the moment of inertia tensor —
~
L =
~
~
I · ~ω (1)
1
The important point is that in the space frame, the principal axes of the top, ˆe
1
, ˆe
2
and ˆe
3
, are all
moving around as the body rotates, but at any given time, they form a complete orthonormal set of
vectors in terms of which we can expand any vector. For example
~ω = ˆe
1
(ˆe
1
· ~ω) + ˆe
2
(ˆe
2
· ~ω) + ˆe
3
(ˆe
3
· ~ω) = ω
1
ˆe
1
+ ω
2
ˆe
2
+ ω
3
ˆe
3
(2)
which just says that ~ω can be expanded in the basis vectors, ˆe
j
. Using (2) in this basis, (1) becomes
~
L = I
1
ω
1
ˆe
1
+ I
2
ω
2
ˆe
2
+ I
3
ω
3
ˆe
3
(3)
The relation (3) is entirely general, valid for an arbitrary moment of inertia, but here, we are dealing
with a symmetric top, for which two of the principle moments are equal. Let’s assume that the two
equal moments are I
1
and I
2
, with corresponding principle axes ˆe
1
and ˆe
2
. As you know from
the equal-moment theorem, this means that any axis in the plane of ˆe
1
and ˆe
2
(which is the plane
perpendicular to ˆe
3
) is a principle axis with the same principle moment. To remind you of this, I
will define I
⊥
as
I
⊥
= I
1
= I
2
(4)
Then we can write (3) as
~
L = I
⊥
ω
1
ˆe
1
+ I
⊥
ω
2
ˆe
2
+ I
3
ω
3
ˆe
3
(5)
Now because of (4), we can eliminate all reference to ˆe
1
and ˆe
2
which enormously simplifies the
problem. If we now multiply both sides of (2) by I
⊥
and subtract both sides of the result from (5),
we get
~
L = I
⊥
ω
1
ˆe
1
+ I
⊥
ω
2
ˆe
2
+ I
3
ω
3
ˆe
3
− [ I
⊥
~ω = I
⊥
ω
1
ˆe
1
+ I
⊥
ω
2
ˆe
2
+ I
⊥
ω
3
ˆe
3
]
~
L − I
⊥
~ω = (I
3
− I
⊥
) ω
3
ˆe
3
(6)
or
~
L = I
⊥
~ω + (I
3
− I
⊥
) ω
3
ˆe
3
= I
⊥
~ω + I
⊥
Ω ˆe
3
(7)
where
Ω =
(I
3
− I
⊥
) ω
3
I
⊥
(8)
There is an ambiguity in the sign of ˆe
3
because the symmetry axis is not directional, and we resolve
this by always taking ω
3
> 0. The constantΩ has units of angular velocity, and it always satisfies
the inequality
−ω
3
≤ Ω ≤ ω
3
(9)
because
−I
⊥
≤ I
3
− I
⊥
≤ I
⊥
(10)
We will talk more about this in a general way soon, and you will explore this inequality quantita-
tively on the problem set .
2

It will sometimes be convenient to rewrite (7) as an equation for ω,
~ω =
~
L/I
⊥
− Ωˆe
3
(11)
The relations (7) and (11) have nothing in them beyond the connection between angular mo-
mentum and angular velocity and the fact that I
1
= I
2
= I
⊥
. They are true at any time, but do not
tell us directly about time dependence. However, it is the simplicity of these relations that allows
us to solve this problem much more easily than we could for a general rigid body. Mathematically,
it is the equality of I
1
and I
2
that allows us to eliminate both ˆe
1
and ˆe
2
from (7) and (11). Physi-
cally, this is particularly important because the one remaining principal axis in (7) and (11) is the
one we see in the typical symmetric top. The symmetry axis is special, and that makes (7) and (11)
particularly useful.
We can now get the time dependence by judiciously using the connection between rotation and
the cross product.
The first step is to notice that ˆe
3
is a principal axis fixed in the body, and it is therefore rotating
with the body. Like any other vector fixed in the body, ˆe
3
has a time dependence given the the
cross product with the angular velocity vector ~ω.
d
dt
ˆe
3
= ~ω × ˆe
3
(12)
The relation (12) is a differential equation for the time dependence of ˆe
3
, but it is not particular
useful, because ~ω is also changing with time in a way that we do not yet know. Instead of trying to
bull our way through this, we can use (11) to write
d
dt
ˆe
3
=
³
~
L/I
⊥
− Ωˆe
3
´
× ˆe
3
=
~
L
I
⊥
× ˆe
3
(13)
This is a much more useful differential equation, because
~
L is constant. In fact, we don’t even have
to solve it, because we already know exactly what it means geometrically. The time dependence of
ˆe
3
given in (13) is what we expect if ˆe
3
is rotating about an axis in the direction of
~
L with angular
velocity
~
L/I
⊥
. Since
~
L is constant in the space frame, this must be what is actually going on for
all times — ˆe
3
is undergoing uniform circular motion with angular velocity
~
L/I
⊥
. Now we are
essentially done. From this, we can calculate everything.
First notice that the component of the angular momentum in the ˆe
3
direction (along the symme-
try axis of the top),
~
L · ˆe
3
is constant. Geometrically, this is because ˆe
3
is rotating around the fixed
vector
~
L, so while its component perpendicular to
~
L is constantly changing, its parallel component
is not. Analytically it follows from (13) as follows:
d
dt
³
~
L · ˆe
3
´
=
~
L ·
d
dt
ˆe
3
=
~
L ·
Ã
~
L
I
⊥
× ˆe
3
!
= 0 (14)
But
~
L · ˆe
3
is related to ω
3
by (5),
~
L · ˆe
3
= I
3
ω
3
(15)
3
Thus (14) means that ω
3
is constant. This in turn means that Ω is constant also, so the coefficients
in (7) and (11) are constant in time. Note also that using (15), Ω can be written as
Ω =
|
~
L |
I
⊥
I
3
− I
⊥
I
3
cos θ (16)
where θ is the angle between
~
L and the symmetry axis (between 0 and π/2).
Because of (11), we know that ~ω is a fixed linear combination of
~
L and ˆe
3
, and therefore since
ˆe
3
is undergoing uniform circular motion with angular velocity
~
L/I
⊥
, then ~ω is also. We can see
this geometrically because (7) or (11) and (14) imply that
~
L, ˆe
3
and ~ω are fixed in a plane and then
from (13) we can conclude that the plane formed by
~
L, ˆe
3
and ~ω rotates about the fixed angular
momentum with angular velocity
~
L/I
⊥
. We can also see this analytically
d
dt
~ω (17)
=
d
dt
³
~
L/I
⊥
− Ωˆe
3
´
(18)
=
d
dt
³
−Ωˆe
3
´
(19)
=
~
L
I
⊥
×
³
−Ωˆe
3
´
(20)
=
~
L
I
⊥
×
³
~
L/I
⊥
− Ωˆe
3
´
(21)
=
~
L
I
⊥
× ~ω (22)
Notice that we have still not figured out explicitly what the perpendicular axes ˆe
1
and ˆe
2
are
doing. But this information is implicit in the relation (11). In words, this relation together with
(13) says that the angular velocity of the top can be taken apart into two components:
1. the rotation of the top around its symmetry axis ˆe
3
with angular velocity −Ω ˆe
3
; and
2. the rotation of ˆe
3
around the fixed angular momentum with angular velocity
~
L/I
⊥
.
Let’s review the few key steps in this derivation. First we used the form of the moment of
inertia tensor to eliminate
Let us now look at the result in animated form in the program FREETOPE. This is an animation
of a rotating rectangular solid, with two opposite sides square, so that it has two equal principal
moments. This is an allowed free rotation of the body in space. It is best to start with I
3
/I
⊥
less
than one, corresponding to a prolate object — long and thin along the symmetry axis. Start (after
getting the aspect ratio and the speed to your liking) with I
3
/I
⊥
= 0.5 and an initial angle of 1.57
radians — that is about π/2. Then (15) implies ω
3
= 0. This makes physical sense, because if the
symmetry axis is perpendicular to the angular momentum, then the angular momentum is in the
direction of one the other principal axes, and the angular velocity and angular momentum are in
4
the same direction. So this describes the rotation of the body about one of the principal axes with
principal moment I
⊥
.
Then work your way towards smaller initial angles. What you see once you get away from
angle 0 or π/2 is three lines representing vectors in addition to to rotating solid. The green line is
the angular velocity vector, ~ω. The vertical purple line and the red line are the components of the
~ω vector along the directions of the angular momentum
~
L and the symmetry axis ˆe
3
. Thus these
vectors are a visual representation of the fundamental relation between
~
L, ~ω and ˆe
3
, expressed in
(7) and (11).
I hope that these animations will help you to understand more deeply the connection between
(11) and (13). The rate of rotation of the plane is always |
~
L|/I
⊥
, which is fixed in the animations.
One way of describing the crucial relation (11) is that we have taken the angular velocity vector
apart into a component along ˆe
3
that describes the rotation of the object around its symmetry
axis and the vertical component
~
L/I
⊥
that describes the rotation of the plane of the symmetry
axis. Writing ~ω this way is great, because you should be able to see both components physically.
Notice that for the prolate object, for an initial angle less than π/2, ~ω is longer than
~
L/I. This
is prolateness in action - the moment of inertial about the long axis is smaller than I
⊥
, so (13)
implies that the magnitude of the angular momentum must be larger than |
~
L|/I
⊥
. The spin around
the axis and the spin around the axis of the angular momentum add positively to the total angular
velocity. For an oblate object, the opposite is true. The angular velocity vector is shorter than
|
~
L|/I
⊥
, which means that the spin around the axis is in the opposite direction. But in this case
as well, the plane of ˆe
3
and ω rotates about the fixed angular momentum, which has the physical
effect that the symmetry axis precesses. It is worth staring at this animation for a long while.
Precession of tops
The precession of the symmetry axis about the direction of the angular momentum is the basic
physics behind the phenomenon of nutation in precessing tops. As you probably know, a spinning
top subject to a gravitational torque will precess. Let’s see how this works. The system is illustrated
5