Гаркушенко В.И. Лекции по ТАУ
Подождите немного. Документ загружается.


Министерство образования и науки РФ
КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
им. А.Н.ТУПОЛЕВА
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Конспект лекций
Казань 2008
2
УДК 681.3
Теория автоматического управления. Конспект лекций: / Авт.-сост.
В.И.Гаркушенко. Казань, 2008.
Рассматриваются вопросы моделирования и исследования линейных, не-
линейных и дискретных систем автоматического управления. Излагаются осно-
вы методов построения математических моделей, преобразования уравнений
динамики, исследования устойчивости и динамических свойств, синтеза зако-
нов управления, а также способы решения практических задач с помощью
средств пакета MATLAB 7.0
Содержание лекций включает все необходимые сведения и доказательст-
ва утверждений, а также вопросы для самопроверки.
Предназначено для студентов очного, вечернего и заочного отделений
инженерных специальностей технических вузов.
3
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ.................................................................................................................................. 1
ЛЕКЦИЯ 1 ...................................................................................................................................5
Предмет и задачи ТАУ. Исторический обзор. Принципы автоматического управления.
Примеры САУ..................................................................................................................................
ЛЕКЦИЯ 2 ................................................................................................................................. 20
Классификация САУ. Математические модели функциональных элементов. Преобразование
Лапласа............................................................................................................................................
ЛЕКЦИЯ 3 ................................................................................................................................. 31
Основные свойства преобразования Лапласа. Передаточные функции в символьном виде и в изображениях
Лапласа........................................................................................................................................................................
ЛЕКЦИЯ 4 ................................................................................................................................. 43
Структура движения системы. Типовые входные сигналы. Временные характеристики. Частотные
характеристики. Свойства АФЧХ. Логарифмические частотные характеристики и их свойства.......................
ЛЕКЦИЯ 5 ................................................................................................................................. 60
Частотные характеристики типовых передаточных функций. Методика построения ЛАХ
и ЛФХ. .............................................................................................................................................
ЛЕКЦИЯ 6 ................................................................................................................................. 75
Структурные схемы САУ и их эквивалентное преобразование. Многомерные системы. .........
ЛЕКЦИЯ 7 ................................................................................................................................. 86
Представление системы в переменных состояния. Способы построения решения. Переход
от сигналов вход-выход к переменным состояния. Блочные системы в переменных
состояний........................................................................................................................................
ЛЕКЦИЯ 8 ................................................................................................................................. 95
Устойчивость САУ. Определение устойчивости по Ляпунову. Устойчивость линейных
систем. Теоремы Ляпунова об устойчивости по линейному приближению................................
ЛЕКЦИЯ 9 ............................................................................................................................... 105
Алгебраические критерии устойчивости линейных систем: Стодола, Гурвица. Частотные
критерии устойчивости: метод D-разбиения, критерий Михайлова. ........................................
ЛЕКЦИЯ 10.............................................................................................................................. 116
Частотный критерий устойчивости Найквиста. Логарифмический аналог критерия
Найквиста. Запасы устойчивости. Устойчивость систем с запаздыванием. Интервальный
критерий Найквиста. .....................................................................................................................
ЛЕКЦИЯ 11.............................................................................................................................. 130
Качество процессов автоматического регулирования. Прямые показатели качества.
Косвенные показатели качества: алгебраические, частотные, интегральные..........................
ЛЕКЦИЯ 12.............................................................................................................................. 147
Задачи синтеза САР. Синтез типовых регуляторов. Синтез корректирующих устройств по
ЛЧХ..................................................................................................................................................
ЛЕКЦИЯ 13.............................................................................................................................. 162
Пример синтеза последовательного корректирующего устройства. Синтез параллельного
корректирующего устройства. Синтез корректирующих устройств по команде и
возмущению.....................................................................................................................................
СПИСОК ЛИТЕРАТУРЫ ....................................................................................................... 12
4
ВВЕДЕНИЕ
В лекциях рассматриваются вопросы моделирования и исследования ли-
нейных, нелинейных и дискретных систем автоматического управления. Изла-
гаются основы методов построения математических моделей, преобразования
уравнений динамики, исследования устойчивости и динамических свойств,
синтеза законов управления, а также способы решения практических задач с
помощью средств пакета MATLAB 7.0. Представленные фрагменты программ
могут быть использованы для решения дополнительных задач при самостоя-
тельной работе для закрепления знаний и получения навыков исследования
САР с помощью ПЭВМ.
Содержание лекций включает все необходимые сведения и доказательст-
ва утверждений, а также вопросы для самопроверки.
В каждой лекции используется своя нумерация формул. Ссылка на фор-
мулу, рисунок или таблицу другой лекции является двузначной, где первая
цифра означает номер лекции, а вторая цифра номер формулы и т.д.
Для освоения материала лекций необходимо заучивать термины, опреде-
ления, утверждения, выделенные курсивом или заключенные в рамки.
Приведенные в лекциях фрагменты программ необходимо выполнить на
ПЭВМ. Для освоения работы с системой MATLAB необходимо ознакомиться с
лабораторными работами №1, №2, а также при необходимости с литературны-
ми источниками.
5
ЛЕКЦИЯ 1
Предмет и задачи ТАУ. Исторический обзор. Принципы автоматического управле-
ния. Примеры САУ.
1. Предмет и задачи курса ТАУ
Практическая деятельность человека связана с совершением работы, со-
стоящей из рабочих операций. Процесс выполнения работы связан с операция-
ми управления, которые определяют начало, темп и конец выполнения рабочих
операций. Совокупность управляющих операций образует процесс управления.
Облегчение человеку выполнения рабочих операций называется механи-
зацией, а операций управления – автоматизацией.
Операции управления частично или полностью могут выполняться тех-
ническими устройствами, которые называются автоматическими управляющи-
ми устройствами (УУ) или регуляторами, в которых реализованы законы
управления.
Совокупность технических устройств (машин, орудий труда, средств ме-
ханизации), совершающих заданную работу, называется объектом управления
(ОУ), например, летательный аппарат (ЛА). Устройство, которое воздействует
при управлении на ОУ, называется управляющим органом (УО), которое конст-
руктивно обычно входит в ОУ, например, рулевые органы ЛА.
Система, в которой все рабочие и управляющие операции выполняются
автоматическими устройствами без участия человека, называется системой ав-
томатического регулирования (САР) или системой автоматического управле-
ния (САУ). На первых этапах развития техники использовались САР, в которых
требовалось поддерживать регулируемую величину ОУ на заданном уровне
(например, уровень воды в паровом котле, температуру нагрева, обороты дви-
гателя, напряжение на зажимах генератора). В современных технических сис-
темах целью управления ОУ является не только регулирование, но и обеспече-
ние различных режимов с учетом ограничений (например, движение мобильно-
го робота при наличии препятствий, переориентация космического аппарата за
6
наименьшее время).
Система, в которой автоматизирована только часть операций управления,
а другая часть (обычно наиболее ответственная) выполняется человеком, назы-
вается автоматизированной системой.
Изучение закономерностей в процессах автоматического управления тех-
ническими процессами (производственными, энергетическими, транспортными
и т. п.) привело к созданию теории автоматического управления (ТАУ), кото-
рая относится к числу научных дисциплин, образующих в совокупности науку
об управлении. В настоящее время ТАУ находит применение для изучения ди-
намических свойств систем управления не только технического характера.
Цель изучения ТАУ состоит в овладении общими принципами и основ-
ными методами построения и исследования САУ и их использование при про-
ектировании реальных систем.
2. Исторический обзор
Как и любая другая наука ТАУ имеет свою историю становления и разви-
тия. Самое раннее из известных автоматических устройств относится ко второ-
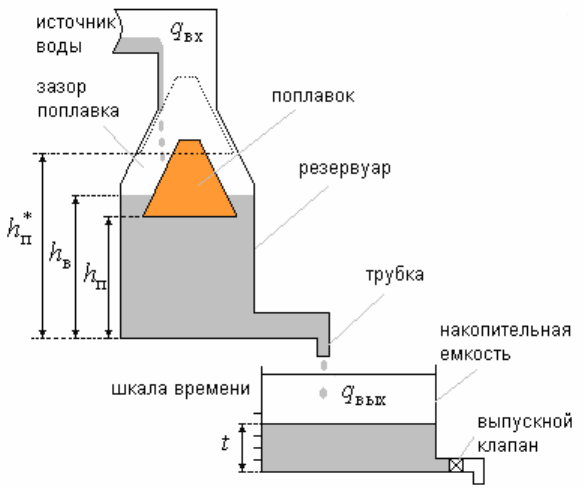
му веку до нашей эры. Это так называемые водяные часы, изобретенные Ктеси-
биосом, в которых время измерялось с помощью капель воды, падающих с по-
стоянной скоростью через трубку из резервуара (рис. 1).
Рис. 1
7
Чтобы обеспечить постоянную скорость истечения воды
вых
q
, необходи-
мо было поддерживать постоянный уровень воды
в
h
в резервуаре. Для этого
использовался плавающий клапан (поплавок), который перекрывал зазор для
поступления воды в резервуар, изменяя скорость
вх
q
поступления воды. При
этом скорость поступления воды
вх
q
зависит от разности
*
п п п
h h h
положе-
ния поплавка при полностью перекрытом зазоре
*
п
h
и текущем положении по-
плавка
п
h
.
Тем самым, в данном устройстве регулируемой величиной является уро-
вень воды в резервуаре
в
h
, который через плавающий клапан изменяет количе-
ство поступления воды в резервуар. Иначе говоря, с помощью плавающего кла-
пана в устройстве реализована обратная связь (ОС): поступление воды в резер-
вуар зависит от уровня воды в резервуаре.
Капли воды падают в накопительную емкость, снабженную проградуиро-
ванной шкалой. Уровень воды указывает промежуток времени с того момента,
когда нижний сосуд был пуст. Фактически накопление воды в нижнем сосуде
является операцией интегрирования (суммирования), которая в настоящее вре-
мя используется в компьютерных вычислениях.
В масляном фонаре, изобретенном Филоном приблизительно в 250 году
нашей эры, поплавковый клапан позволял поддерживать постоянный уровень
масла, игравшего роль горючего.
Первой системой с обратной связью, изобретенной в Европе, был регуля-
тор температуры Корнелиуса Дреббеля (1572-1633) из Голландии. Дени Папе
(1647-1712) в 1681 г. изобрел первый регулятор давления для паровых котлов,
работавший по принципу предохранительного клапана.
В России первой в истории системой с обратной связью был поплавковый
регулятор уровня воды в паровом котле, изобретенный Иваном Ивановичем
Ползуновым в 1765 г. С помощью поплавка измерялся уровень воды, а рычаж-
ный механизм воздействовал на клапан, регулировавший подачу воды в котел.
Первым автоматическим регулятором промышленного назначения счита-
8
ется центробежный регулятор Джеймса Уатта, разработанный в 1769 г. для
управления скоростью вращения вала паровой машины.
Паровая машина не случайно стала первым объектом для промышленных
регуляторов, так как она не обладала способностью устойчиво работать сама по
себе. Часто возникала ситуация, когда подключенный к машине регулятор дей-
ствовал не так, как ожидал конструктор: он начинал раскачивать машину. Де-
лались попытки «успокоения» колебаний самого регулятора, считая, что этого
достаточно и для успокоения колебаний машины. При таком подходе теорети-
ческие исследования не могли стать фундаментом новой науки и были лишь
дополнительными проработками в рамках прикладной механики, придатком к
ее разделу о паровых машинах.
Коренное изменение в подходе к проблеме и в методологию исследова-
ния внесли три фундаментальные теоретические работы, содержавшие в себе,
по существу, изложение основ ТАР: работа Джеймса Клерка Максвелла (1831-
1879) «О регуляторах» (1866) и работы Ивана Алексеевича Вышнеградского
(1831-1895) «Об общей теории регуляторов» (1876) и «О регуляторах прямого
действия» (1877). Данные работы заложили основы системного подхода к про-
блеме, рассмотрев регулятор и машину как единую динамическую систему.
Уже в те годы теория регулирования стала стимулировать разработки ма-
тематических методов для исследования систем управления. По инициативе
Максвелла был разработан алгоритм для оценки расположения корней характе-
ристического уравнения и устойчивости Эдвардом Джоном Раусом (1831-1907).
По просьбе словацкого инженера и ученого Ауреля Стодолы (1859-1942) в 1895
году немецкий математик Адольф Гурвиц (1859-1919) вывел детерминантный
критерий устойчивости.
В 1892 г. вышла классическая работа русского ученого, механика Алек-
сандра Михайловича Ляпунова (1857-1918) «Общая задача об устойчивости
движения», которая заложила основы методов анализа устойчивости и синтеза
нелинейных систем, которые развиваются в настоящее время.
В первые десятилетия XX века ТАР, вышедшая из рамок прикладной ме-
9
ханики, формируется как общетехническая дисциплина. В этот период появля-
ется целый ряд работ, рассматривающих приложение теории и распространяю-
щих ее выводы на самые разнообразные технические процессы. С кратким
очерком развития ТАУ этого и последующего периода можно ознакомиться в
книгах советского ученого, педагога Авенира Аркадьевича Воронова (1910-
1992) [8].
3. Основные понятия и принципы автоматического управления
Если подытожить сказанное, то можно выделить основные моменты ста-
новления ТАУ: 1) изобретение обратной связи; 2) системный подход; 3) при-
влечение математических методов.
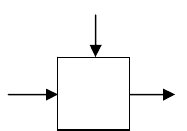
На языке системного подхода любую физическую
систему можно абстрактно представить в виде модели с
причинно-следственными связями. На рис. 2 представлена
функциональная схема такой модели, где
S
– система,
u
–
управляющий сигнал или входной сигнал (вход),
f
– внешнее
воздействие (возмущение);
y
– управляемая величина или вы-
ходной сигнал (выход). Предполагается, что передача сигнала осуществляется
по направлению стрелки, но не обратно, что отражает причинно-следственную
связь протекающего процесса. Возможны также случаи, когда сигнал по физи-
ческой природе проходит только в одном направлении, т.е. выполняется свой-
ство детектируемости сигнала (например, у самотормозящегося редуктора).
При скалярном входном и выходном сигналах система называются одномерной.
В качестве входных и выходного сигналов могут выступать вектора
1
[ ,... ]
T
m
u u u
,
1
[ ,... ]
T
k
f f f
,
1
[ ,... ]
T
l
y y y
, которые на функциональной схеме
обозначаются двойными стрелками. В этом случае система называется много-
мерной, частным случаем которой является одномерная система.
Если выход системы
( , )
y u f
является функцией от входов
,
u f
(ана-
литической или графической), то такая зависимость называется статической;
если
( , , )
y t u f
также зависит от независимого изменяющегося параметра
t
,
S
u
f
y
Рис. 2
10
то такая зависимость называется динамической. В качестве параметра
t
обычно
используется время, которое удовлетворяет уравнению /
t
dt d m
, где
–
вспомогательный параметр,
t
m
– масштабный коэффициент (если
t
m
– констан-
та, то
t
t m
). Параметром
t
или
может быть, например, уровень воды в
нижнем сосуде водяных часов Ктесибиоса (рис. 1).
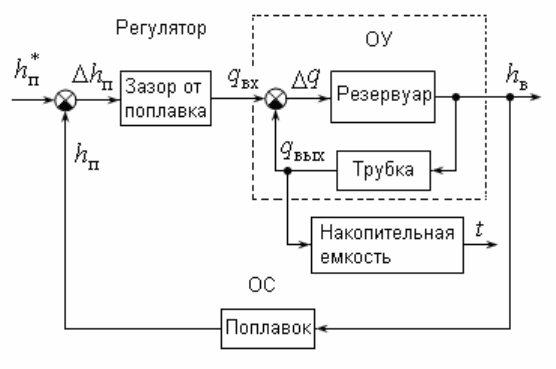
Любая система в общем случае состоит из отдельных функциональных
элементов (ФЭ), соединенных между собой. На рис. 3 представлена функцио-
нальная схема водяных часов Ктесибиоса (рис. 1), где ФЭ выделены в отдель-
ные блоки, точки обозначают ветвление сигнала, перечеркнутый кружок со
стрелками означает суммирование сигнала, если сектор закрашен, то это озна-
чает вычитание сигнала.
Рис. 3
Здесь вход системы
*
п
h
задан конструктивно, регулируемая величина или
выход
в
h
изменяется во времени
t
, если разность
вх вых
q q q
отлична от
нуля. Иначе говоря, если резервуар недостаточно заполнен водой, то втекает
воды больше, чем вытекает. Тем самым данная система является динамической
из-за наличия емкости резервуара. С течением времени в установившемся ре-
жиме (в равновесном состоянии) должен установиться баланс, приходящей и
уходящей из резервуара воды, т.е.
уст
0
q
. При этом ошибка (рассогласова-
ние)
*
п уст п п уст
0
h h h
и величина
в уст
h будет иметь заданное значение, за-