Габбасова Ж.Д. Автоматизированные технологические процессы
Подождите немного. Документ загружается.

Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
Рис.2.8 Цифро-аналоговый преобразователь с каскадом сопротивлений
Положение ключей
n
SSS ...,
21
соответствует либо 0, либо 1 во входном
цифровом слове.
Выходное напряжение составляется из последовательно убывающих
членов
n
n
zef
s
ss
2
...
22
2
2
1
1
0
Например, в -8 - битном ЦАП байт
87654321
10011010
SSSS
S
S
SS
приводит к следующему
выходному напряжению (при
в
zef
10
).
в
zef
48,3
256
1
32
1
16
1
4
1
0
Очевидно, что ЦАП выдает только дискретные выходные напряжения с
разрешением
n
zef
2
.
Аналого-цифровое преобразование. Для компьютерной обработки
дискретные аналоговые значения измерительного сигнала необходимо
представить в цифровой форме, т.е. выполнить АЦ преобразование. АЦП
генерирует двоичное слово – цифровой выход – на основе аналогового
сигнала. АЦП выполняется в виде платы расширения компьютера.
АЦП могут работать по двум методам – параллельное сравнение и
пошаговое приближение (аппроксимация).
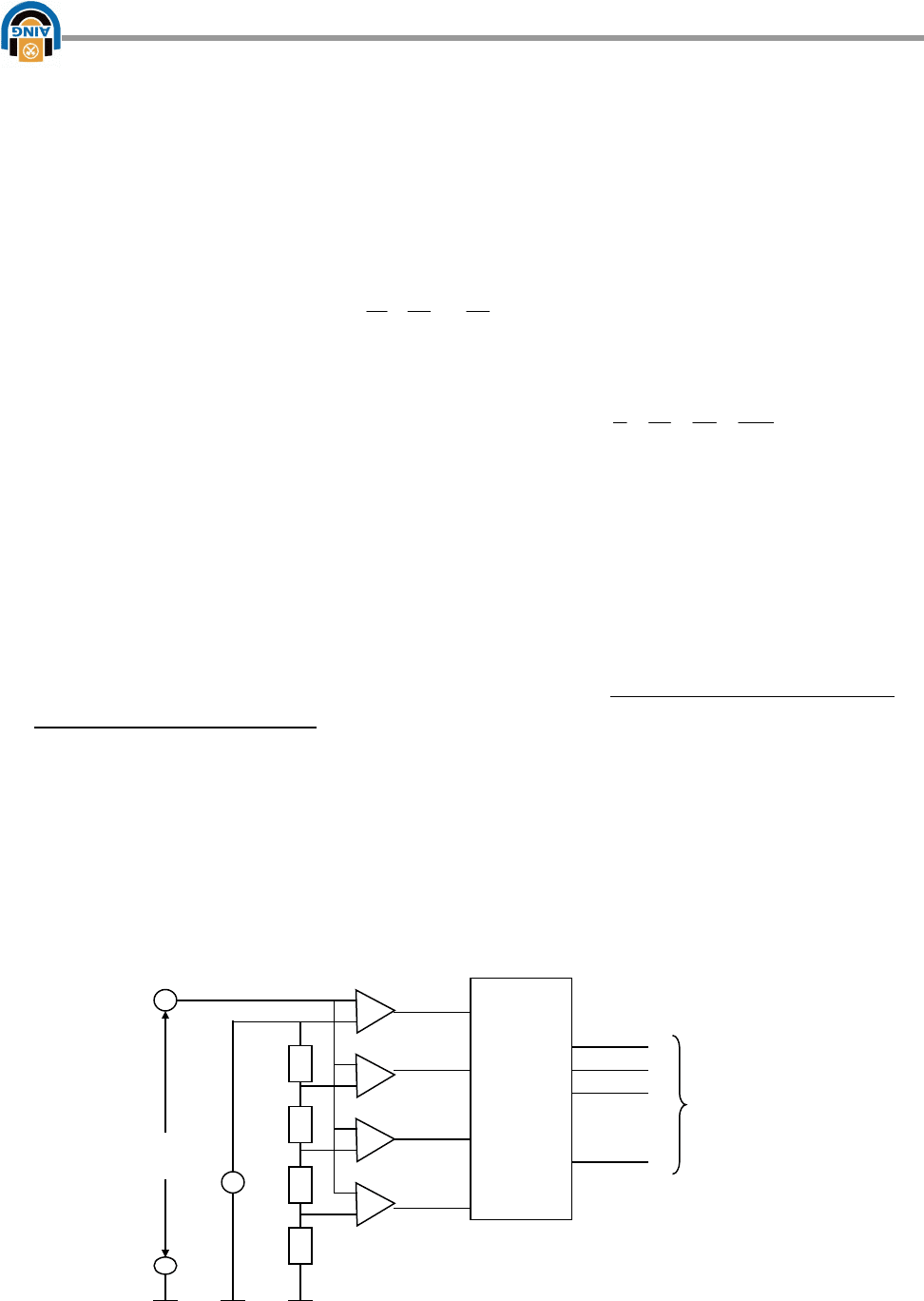
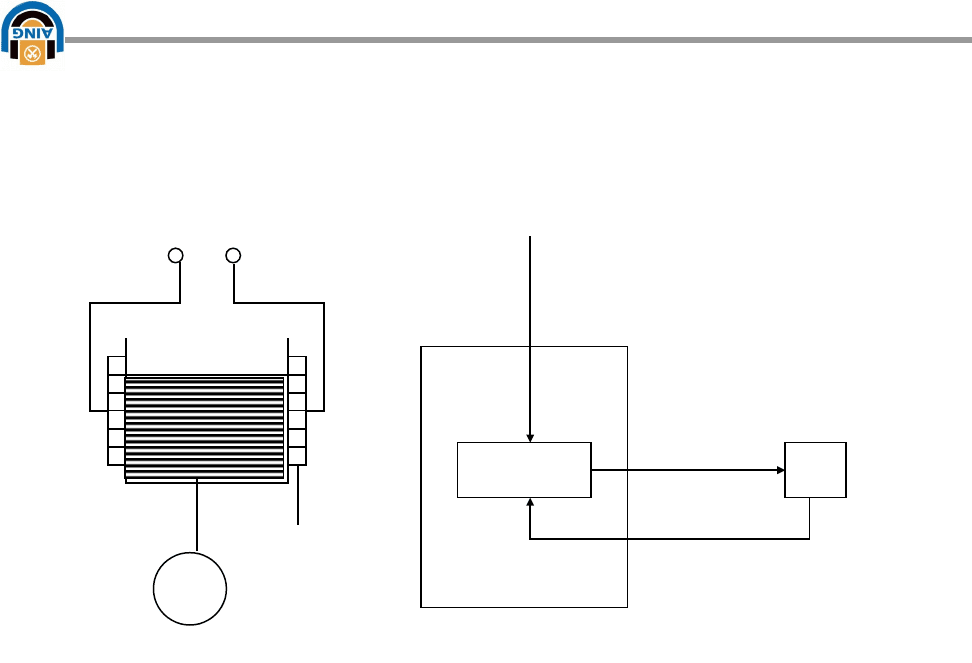
В АЦП работающим по принципу сравнения (conparation), входное
значение сравнивается с различными уровнями напряжения, выработанными
на основе известного опорного напряжения и каскада сопротивлений
(рис.2.9). На выходе каждой схемы сравнения – компаратора появляется 0
либо 1 в зависимости от соотношения входного и опорного напряжений.
Выход каждого компаратора - затем преобразуется в двоичный код. Такие
АЦП обладают хорошим быстродействием, но довольно дороги из-за
применения компараторов.
Рис. 2.9. АЦП с параллельными схемами сравнения
21 (107)
ref
in
R
R
R
R
Цифровой
выход
Преобразо
ватель
логическая
цепь/код
Компараторы
Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
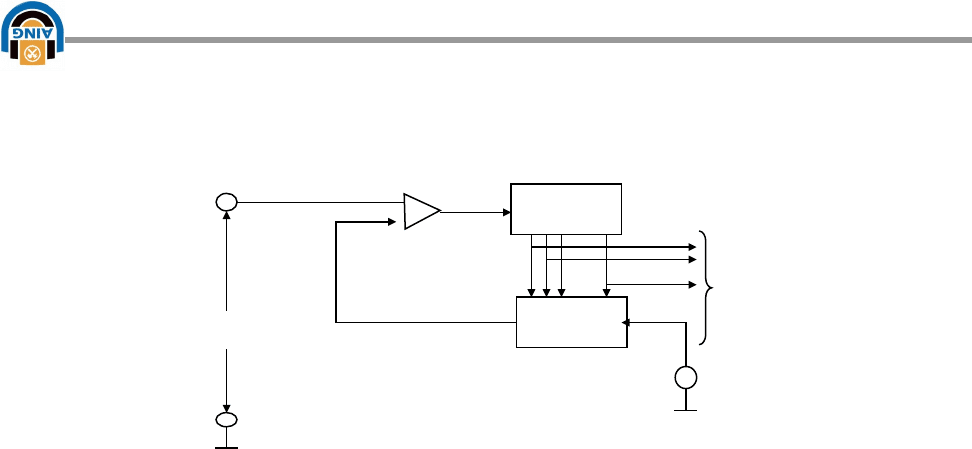
АЦП, работающий по принципу пошагового приближения построен
на основе ЦАП.
Рис. 2.10. АЦА, работающий по принципу пошагового приближения.
Диапазон входного сигнала разделен на 2
n
–1 интервалов, где n – число
бит в выходном слове. Счетчик быстро генерирует последовательные числа,
которые сразу преобразуются в аналоговые значения. Счетчик продолжает
наращивать выход до тех пор, пока разница напряжений между выходом
АЦП и входным аналоговым значением не станет меньше разрешающей
способности АЦП.
Литература: 7 осн. [121-124, 125-126, 128-129, 137, 143-147, 189-193]
ЛЕКЦИЯ 4. АВТОМАТИЗАЦИЯ НЕПРЕРЫВНЫХ И ДИСКРЕТНЫХ
ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
4.1 Методика анализа технологического процесса как объекта
управления
При разработке автоматизированной системы управления
технологическим процессом одним из важнейших этапов процесса синтеза
системы является анализ технологического процесса как объекта управления,
т.е. выявление структуры процесса, определения входных и выходных
переменных, нахождение математических зависимостей между входными и
выходными переменными, описывающих поведение изучаемого
технологического процесса. Рассмотрим данный анализ на примере
металлургического процесса. Заметим, что всякий металлургический
процесс предназначен для изменения физических или физико-химических
свойств подаваемого в металлургический агрегат материального потока с
затратой на это определенного количества энергии, зависящего от
конструктивных и технологических особенностей агрегата. Поэтому для
любого металлургического процесса можно определить входной
материальный поток, свойства которого изменяются в данном процессе,
22 (107)
in
Аналоговый выход
Цифровой
выход
Компарато
р
ref
Цифровой
счетчик
ЦАП

Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
выходной материальный поток – результат обработки входного
материального потока. Для осуществления металлургического процесса в
агрегат подводится энергия – входной энергетический поток.
Выходной энергетический поток отождествляется с отводимой из
агрегата энергией выходных продуктов или физико-химических изменений
материальных потоков.
Состояние входных материальных и энергетических потоков
характеризуется некоторой совокупностью входных переменных, например,
величина потока (расход вещества, энергии и т.д.) содержания отдельных
компонентов, давления и т.д.
Входные переменные можно классифицировать следующим образом:
управляющие входные переменные
i
V
(управляющие воздействия или
просто управляющие) – те, которые можно изменить добиваясь
определенной цели, например заданных характеристик металлургических
процессов.
неуправляемые входные переменные (возмущающие воздействия) – те,
которые невозможно изменять каким-либо образом, неуправляемые входные
переменные подразделяются на контролируемые
i
Z
(те переменные, о
численных значениях которых в любой момент или в дискретные моменты
времени может быть получена информация с помощью тех или иных
приборов и методов) и неконтролируемые
i
(это те, информация о
численных значениях которых недоступна).
Состояние выходных материалов и энергетических потоков
характеризуется также некоторой совокупностью выходных переменных
(управляемых величин)
i
X
зависящих от входных переменных, как
управляющих
i
V
, так и возмущающих
i
Z
и
i
воздействий. К выходным
переменным относятся такие, как количества выходных материальных и
энергетических потоков, содержание отдельных компонентов, температуры,
добавления в агрегате и т.д.
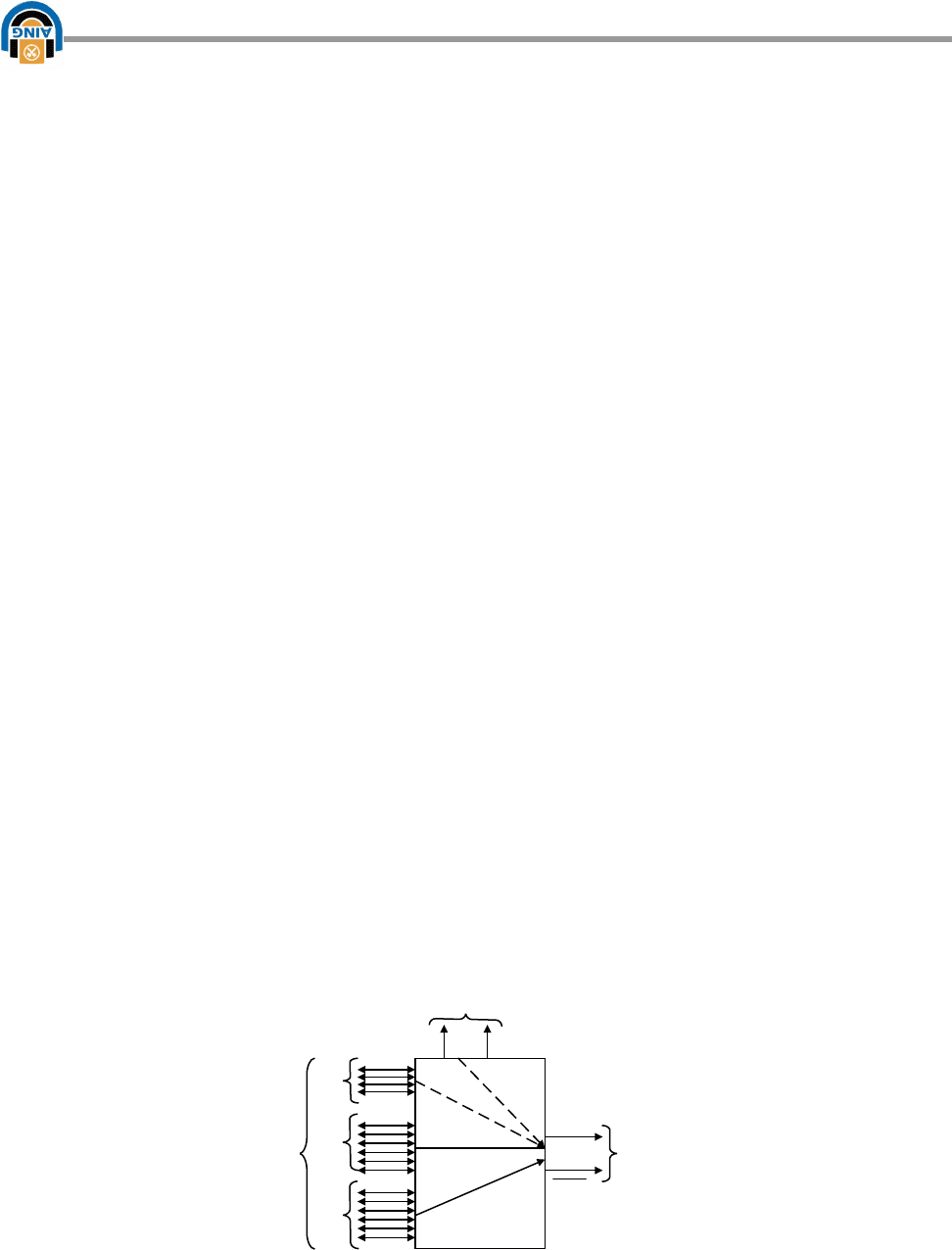
Структура металлургического процесса как объекта управления
представлена на рис. 3.1. Стрелками показана взаимосвязь выходных и
входных переменных (управляющих и возмущающих воздействий).
Рис. 3.1. Структурная схема объекта управления
Рассмотрим вышеприведенную методику анализа технологического
процесса как объекта управления на примере процесса рудотермической
электроплавки медных концентратов (рис.3.2).
Описание процесса руднотермической электроплавки и самой
электропечи позволяет подчеркнуть следующие особенности данного
технологического процесса, как объекта управления.
23 (107)
U
1
Х
1
1
Z
1
Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
1. Входными материальными потоками процесса электроплавки
являются непрерывно поступающие топливо (электроэнергия) и шихта,
периодически загружаемый конвертерный шлак, выходными – периодически
сливаемые штейн и отвальный шлак. Однако, значительный объем шлаковой
ванны, непрерывность процессов плавления шахты и шлакообразования
позволяют отнести электроплавку к числу непрерывных объектов.
2. Показатели, определяющие и характеризующие протекание
процесса электроплавки имеют различную физическую природу: расходы
материальных
G
и энергетических
g,W
потоков, химические составы
X
,
температуры, технико-экономические показатели. Они могут быть отнесены
к числу входных, выходных или режимных переменных объекта управления,
управляемых
U
или неуправляемых
Z
, контролируемых непрерывно,
дискретно или неконтролируемых и т.п. (рис.6). Таким образом,
электротермическая плавка является многомерным объектом управления.
3. Большой объем ванны печи, значительная емкость бункеров
шихтопитателей обуславливают значительную инерционность процесса
плавки.
4. На процесс плавки оказывают влияние ряд медленно изменяющихся
неконтролируемых фактором – старение агрегата, дрейф минералогического
состава сырья, настылеобразования, приводя к нестационарности процесса.
5. Наличие неконтролируемых переменных, дискретных характер
контроля ряда переменных, высокий уровень помех в каналах контроля
приводят к неполноте информации о процессе.
6. Вследствие значительных геометрических размеров электропечи
процессы плавления шихты распределены по поперечному сечению печи.
Пространственная распределенность процесса и наличие транспортеров и
других вспомогательных агрегатов обуславливают наличие значительных
запаздываний по каналам данного объекта.
7.
Рис.3.2 Схема входных и выходных переменных процесса
электроплавки.
24 (107)
Q
G
YW
Z
x
Y
процесс
электроплавки
U
Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
4.2. Схемы автоматизации типовых технологических
процессов
Управление процессом в реальном времени. Управляющий
компьютер должен работать со скоростью, соответствующей скорости
процесса. Само понятие ’’реальное время’’ указывает на то, что в реакции
компьютерной системы на внешние события не должно быть заметно
запаздывания
Рис.3.3. Применение компьютера в управлении процессом.
Параллельность - одно из важных свойств реального мира. Все события
вокруг нас протекают параллельно. Из этого свойства следует важный вывод:
компьютер, взаимодействующий с такими процессами или управляющий им,
должен учитывать параллельную природу и должен уметь управлять
параллельными задачами. В этом заключается отличие управляющего
компьютера от обычного, для которого естественным является
последовательный режим.
В качестве примера можно привести управление прессом для пластика.
Компьютер должен одновременно регулировать температуру
(поддерживать ее постоянной) и координировать последовательность
технологических операций.
Температура пластика в контейнере должна поддерживаться в пределах
узкого диапазона. УВМ периодически считывает текущую температуру и
рассчитывает тепло, необходимое для ее поддерживания на требуемом
уровне. Тепло поступает от нагревательного элемента, управляемого
компьютером. Время работы нагревательного элемента согласовано с
количеством тепла, которое необходимо подвести.
Нижняя часть пресса состоит из поршня, выталкивающего определенное
количество расплавленного пластика через насадку. Когда поршень
находится в крайнем правом положении, цилиндр заполняется пластиком.
Затем поршень быстро перемещается влево, выдавливая требуемое
количество пластика.
Положение поршня контролирует импульсный датчик, который
генерирует определенное число импульсов на каждый миллиметр
перемещения поршня, а объем выдавливаемого пластика определяется
числом импульсов за время перемещения. Движение поршня прекращается
при достижении заданного числа импульсов.
Чтобы обеспечить заданную производительность, температура пластика
должна иметь заданное значение к тому моменту, когда поршень при
движении вправо минует выходное отверстие контейнера.
Error: Reference source not found
25 (107)
Внешняя среда
Оператор
Компьютер,
работающий в
режиме реального
времени
Технологический
процесс
Цилиндр
давления
Компьютер,
управляющий
процессом
(УВМ)
ТЕ
Нагревательные элементы
Расплавленный пластик
ВправоВлево
Команды перемешивания
Серия импульсов
Датчик импульсов
Температура
Регулирование нагрева
Правое крайнее положение

Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
Рис.3.4 Пресс для пластика.
В этом примере компьютерная система должна регулировать
температуру и давление поршня одновременно. Значение температуры
поступает в виде непрерывного сигнала от датчика. Положение поршня
засчитывается исходя из числа импульсов. Кроме того, еще два датчика
генерируют двоичные сигналы при достижении поршнем крайнего
положения.
Управление таким процессом с помощью компьютера осуществляется
на принципе управления с помощью прерывания.
Главная сложность программы управления прессом – необходимость
организации переключения между задачами. На практике проблема решается
с помощью двух независимых программ, выполняемых на одной машине:
одна регулирует температуру, а другая – управляет перемещением поршня.
Метод сигнализации, называемый прерыванием, используется для
переключения центрального процессора с исполнения одной задачи на
другую.
Управления последовательностью событий и бинарное управление.
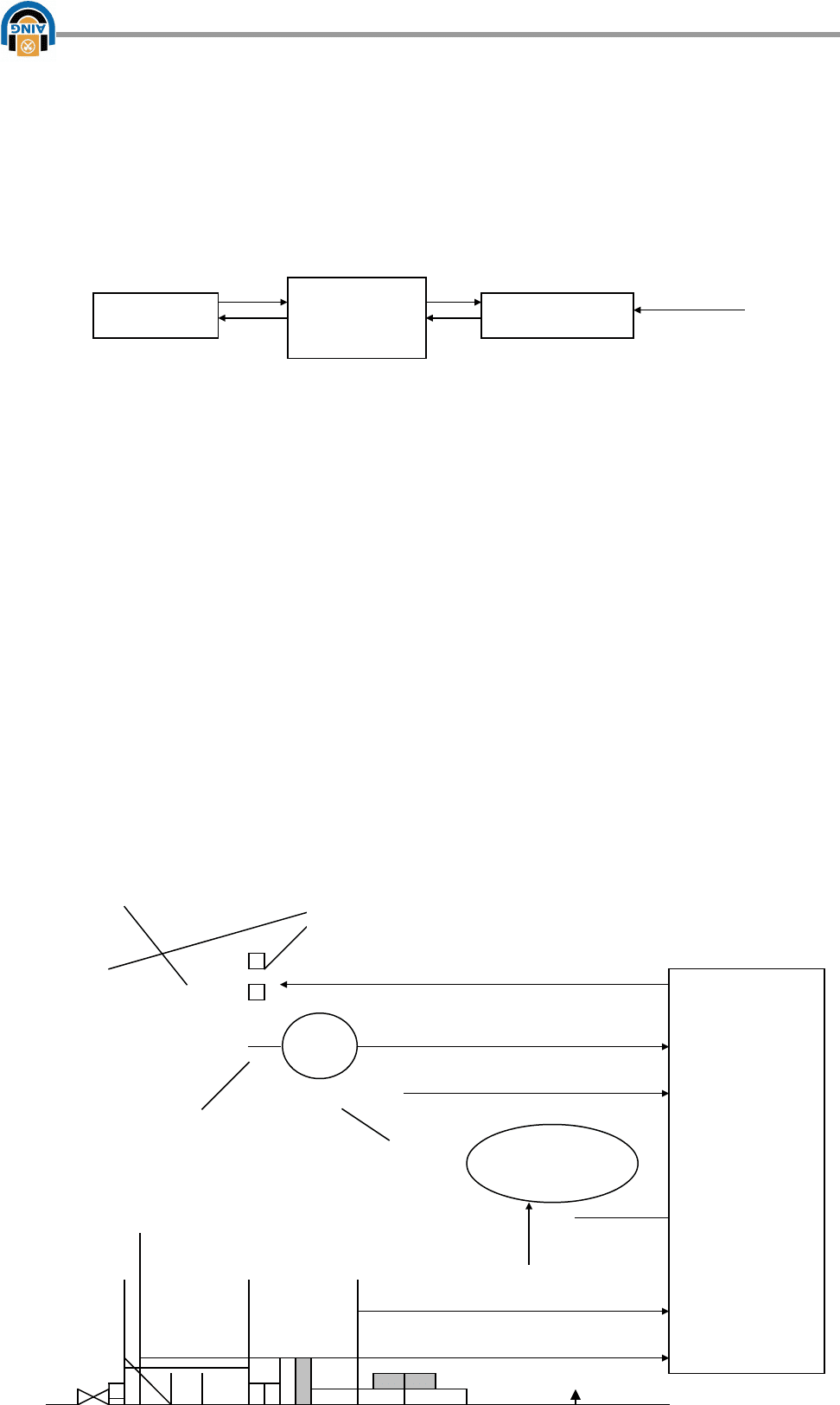
Химический реактор представленный на рисунке 3.5 – пример системы
управления последовательностью событий.
В реакторе происходит перемешивание реагентов с помощью смесителя.
Уровень давления контролируется датчиком давления PE, а температура –
датчиком TE.
Температура регулируется горячей или холодной водой, подаваемой в
окружающий бак кожух; потоки воды регулируются клапанами Г (горячего)
и Х (холодного).
26 (107)
Левое крайнее положение
ТЕ
PЕ
Г Х
смеситель
Подвод
горячей
воды
Подвод
холодной
воды
Т
Д
Выход
продукта
Отвод воды
Реагент 2Реагент 1
Б
А

Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
Рис.3.5. Химический реактор с регулированием температуры.
В этом примере в реакторе выполняются следующие операции:
1.Открыть клапан А и залить реагент 1.
2.Если датчик Д показывает, что достигнут новый требуемый уровень,
то закрыть клапан А.
3.Запустить смеситель.
4.Открыть клапан Б и залить реагент 2.
5.Если датчик Д показывает, что достигнут новый требуемый уровень,
то закрыть клапан Б.
6.Открыть клапан Г для нагрева бака.
7.Если датчик Т показывает, что достигнута требуемая температура, то
закрыть клапан Г.
8.Установить таймер на время протекание химической реакции.
9.При срабатывании мера – ’’время истекло’’ – остановить смеситель.
10. Открыть клапан Х для охлаждения бака.
11. Проверить температуру в баке, если температура упала ниже
предела, то закрыть клапан Х и открыть клапан В для опорожнения бака.
12. Закрыть клапан В. Повторить все этапы.
Эта система предназначена для управления очередностью выполнения
операции, которая зависит от некоторых логических условий. Входные и
выходные данные системы являются бинарными в том смысле, что датчики
контролируют два состояния или граничное условие. Входные и выходные
данные системы являются бинарными в том смысле, то датчики
контролируют два состояния или граничное значение. Например, клапан
открыт или закрыт, индикатор закрыт или нет и так далее.
Команды управления имеют аналогичный формат: запустить или
остановить двигатель, включить/отключить нагреватель и т. п.
Если задача управления основана только на бинарной логике, то
очевидно, что решать удобнее и проще цифровыми средствами. Существуют
так называемые программируемые контроллеры, специально созданные для
решения таких задач.
Типовые схемы регулирования температуры представлены на рис.3.6 и
рис.3.7
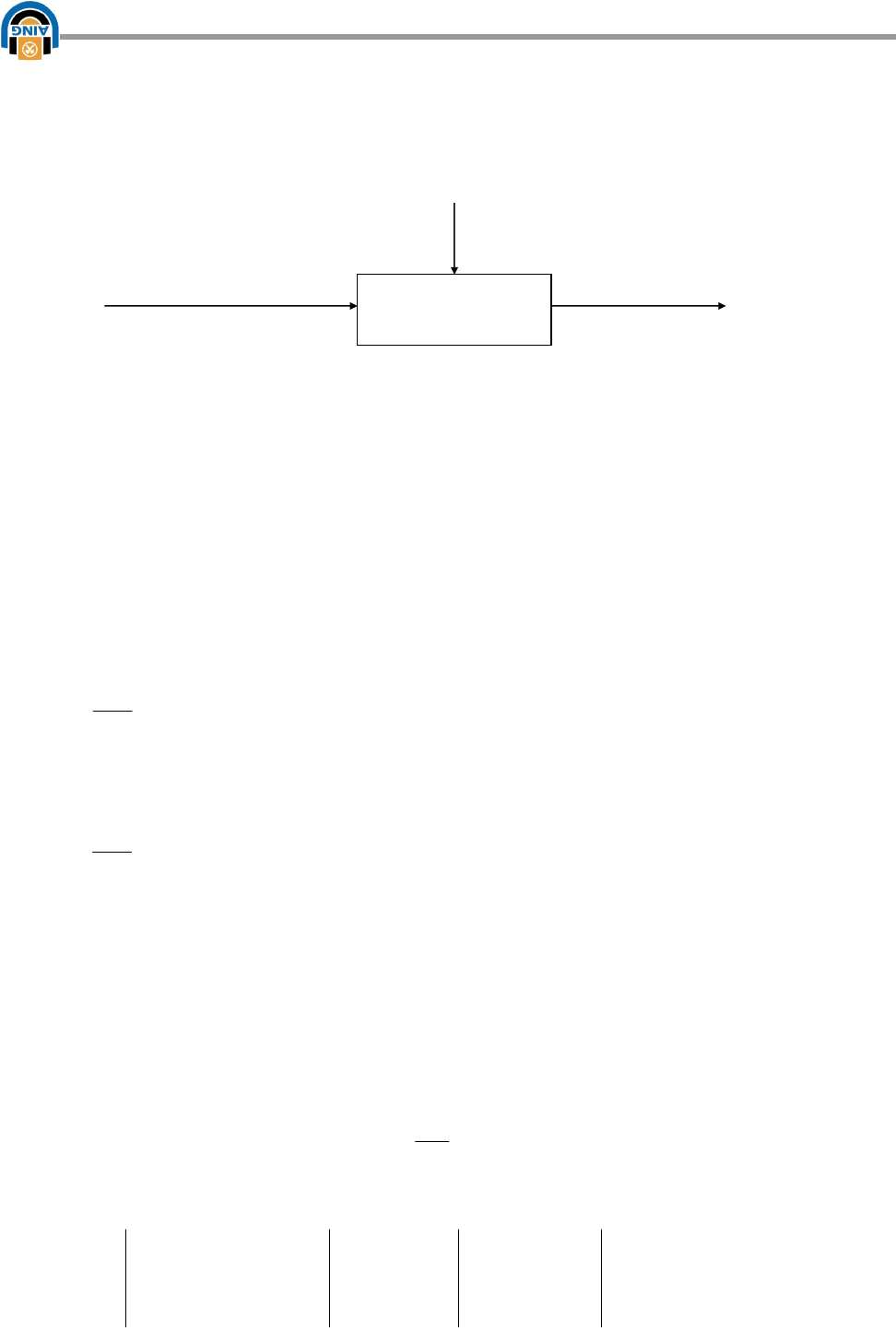
В данном баке температура должна поддерживаться постоянной. В этом
примере все сигналы аналоговые, т.е. изменение температуры отслеживается
непрерывно (в отличии от предыдущего примера, где проверялось лишь
превышение порогового значения), а подача тепла может регулироваться
плавно. Измерения производятся периодически, например каждую секунду, и
27 (107)
Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
поступают в компьютер. Текущее значение температуры сравнивается с
заданным (опорным), которое хранится в компьютере. Величина нагрева или
охлаждения рассчитывается по разности между заданным и измеренным
значениями (рис.3.7).
Error: Reference source not found
Рис.3.6. Система регулирования Рис.3.7 Контур управления – система
температуры. регулирования температуры.
4.3 Уравнения состояния динамических систем
Дифференциальные уравнения, описывающие физический процесс,
всегда можно преобразовать в систему обыкновенных дифференциальных
уравнений. В этом случае говорят, что это описание в виде уравнения
состояния или в пространстве состояний. Главное преимущество такой
формы записи в том, что для решения этих уравнений можно использовать
численные методы. Основой математического аппарата для моделей в
пространстве состояния служат, главным образом, линейная алгебра –
векторная и матричная форма значительно упрощает описание.
Состоянием называется набор всех переменных – так называемых
переменных состояния. Если известны текущее состояние системы и
входные сигналы, то можно предсказать ее дальнейшее поведение. Другими
словами, состояние – это минимальное количество информации о системе,
которое необходимо, чтобы предсказать ее будущее поведение.
Состояние Х можно представить как вектор – столбец, компоненты
которого – переменные состояния Х = (х
1
,х
2
,…,х
n
)
T
Непосредственно измерить все переменные состояния практически
невозможно. Поэтому описание в пространстве состояний называется также
внутренним описанием. Выходные величины, т.е. измерения, обозначаются
через y
1
,у
2
,…,у
n
и составляют вектор У
У = (у
1
,у
2
,…,у
p
)
T
В общем случае число датчиков Р, связанных с процессом, меньше
числа переменных состояния n. Поэтому вычисление Х и У весьма сложная и
нетривиальная задача.
На любую техническую систему влияют сигналы двух типов – сигналы,
которые можно измерить вручную или автоматически какими-либо
техническими средствами, и сигналы, которыми управлять невозможно.
Сигналы первого типа называются управляющими сигналами или
переменными управления u
1
,u
2
,…,u
r
и составляют вектор U
U = (u
1
,u
2
,…,u
r
)
Входные сигналы второго типа могут влиять на систему, но не
поддаются управлению.
Все эти сигналы обозначаются вектором V
V = (v
1
,v
2
,…,v
m
)
28 (107)
~
ТЕ
нагреватель
Контроллер
Бак
Текущее значение
температуры
Сигнал управления
нагревателем
Опорное (заданное)
значение температуры
Управляющий компьютер
Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
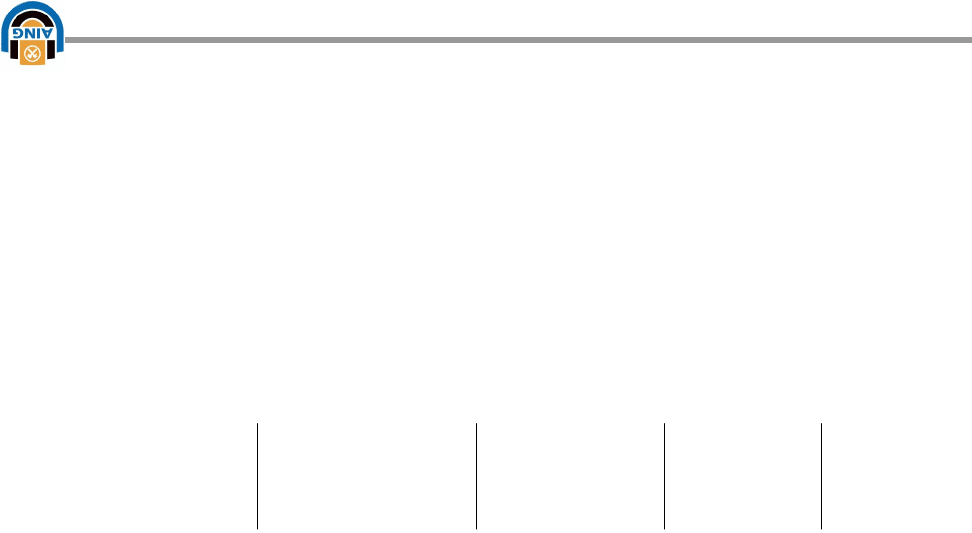
Целью системы управления является вычисление на основе имеющихся
измерений У таких сигналов U, чтобы, несмотря на влияние возмущений V,
техническая система выполняла поставленные задачи. Управляемую систему
можно представить в виде блок-схемы (рис.3.8)
Рис.3.8 Блок-схема управляемой системы.
Описание линейной системы в пространстве состояния
Большинство процессов можно смоделировать линейными
дифференциальными уравнениями, в которых отсутствуют члены,
содержащие произведения переменных состояния типа х
1
2
; Х*U;или Х
1
*Х
2
.
Линейная система, имеющая n переменных состояния и r входных
переменных, описывается следующими уравнениями состояния с
постоянными коэффициентами:
dt
dx1
a
11
x
1
+ a
12
x
2
+…+ a
1n
x
n
+ b
11
u
1
+ b
12
u
2
+…+ b
1r
u
r
.
.
.
dt
dxn
a
n1
x
1
+ a
n2
x
2
+…+ a
nn
x
n
+ b
n1
u
1
+ b
n2
u
2
+…+ b
nr
u
r
где параметры a
ij
и b
ij
– константы.
Поскольку эти уравнения являются дифференциальными уравнениями с
постоянными коэффициентами, они обладают рядом привлекательных
свойств. Например, всегда можно найти аналитическое решение X(t) при
произвольных входных сигналах U(t). Начальные условия определяются n
константами.
X(0) = (x
10
,x
20
,…,x
n0
)
T
В матричном виде уравнения состояния записываются проще
dt
dX
AX + BU
Где А и В матрицы, содержащие коэффициенты
A =
annanan
naaa
naaa
...21
............
2...2221
1...1211
B =
bnrbn
rbb
rbb
...1
.........
2...21
1...11
29 (107)
Переменные
Х состояния
(внутренние)
V возмущения
У
Выходные сигналы
(результаты измерения)
Опорное значение (управляющие
переменные)
U
Атырауский институт нефти и газа
УМК. Автоматизация технологических процессов. Издание первое.
При единственном управляющем сигнале матрица В имеет только
один столбец.
Между внутренними переменными состояния Х и измерениями У
существует линейная зависимость. Кроме того, иногда имеется прямая связь
между управляющими переменными U и выходными переменными У.
у
1
=
с
11
x
1
+ с
12
x
2
+…+ с
1n
x
n
+ d
11
u
1
+ d
12
u
2
+…+ d
1r
u
r
.
.
у
p
= c
p1
x
1
+ c
p2
x
2
+…+ c
pn
x
n
+ d
p1
u
1
+ d
p2
u
2
+…+ d
pr
u
r
Или в векторно-матричных обозначениях У = CX+DU
где C =
cnncncn
nccc
nccc
...21
............
2...2221
1...1211
D =
dprdp
rdd
rdd
...1
.........
2...21
1...11
Если имеется только одна выходная переменная, то С состоит из одной
строки. Обычно нет прямой связи между входными и выходными
переменными, и тогда матрица D – нулевая.
Линейная система имеет много преимуществ. Наиболее важными из
них является принцип суперпозиции. Это означает, что если при каком-либо
изменении амплитуды входного сигнала ∆U выходной сигнал изменяется на
величину ∆У, то при удвоенном изменении выходного сигнала 2*∆U
выходной сигнал изменится на величину 2∆U.
Линейные сигналы обладают свойствами АДДИТИВНОСТИ входных
сигналов, т.е. если входной сигнал U1 вызывает выходной сигнал У
1
, а U
2
–
сигнал У
2
, то общий сигнал U
1
+U
2
на входе, приведет на выходе к У
1
+У
2
.
исходя из этого можно сказать, что влияние сигналов управления и
возмущений можно анализировать идеально.
Несмотря на все достоинства линейного описания, применять его
следует с большой осторожностью, поскольку большинство процессов
существенно нелинейны. Если нелинейности “гладкие”, т.е. отсутствуют
скачки, то при определенных условиях нелинейную систему можно
рассматривать как линейную. Тогда линейное описание справедливо для
малых отклонений вокруг точки равновесия.
Многие параметры промышленных процессов должны поддерживаться
в близи некоторых постоянных (опорных) значений, а целью системы
управления является приведение параметров процесса к их опорным
значениям. Поэтому, пока отклонения от опорного значения малы. Линейное
описание системы является адекватным.
Описание системы в виде отношений входных и выходных переменных.
Если в системе описывать только связь между входными и выходными
сигналами, то некоторые внутренние переменные и их взаимосвязи остаются
скрытыми, представление системы становится более комплексными и имеет
меньшее число параметров, чем описание в пространстве состояний.
30 (107)