Fox J.A. Transient Flow In Pipes, Open Channels And Sewers
Подождите немного. Документ загружается.


Sec.
6.21
Valves
t37
136
Boundary
conditions continued
lch.
6
This
is not
perfectly
accurate
but
it closely
approximates the
accurate
analysis of
the valve.
This
is
given
in the author's book Hydraulic analysis of unsteady
flow
in
pipe
networ,ts. Generally,
analysts do not even correct
the manufacturer's
graph;
so
the results obtained
from an analysis, using this correction, should be significantly
more accurate.
The effect
is not
negligible.
In
a
valve
opening, s increases from
zero
to the
value at
which
the
opening
is to be
steady,
i.e.
unity if the
valve
is to be full open
-
and this
movement must
occur in the
time specified
for
it.
Conversely,
with a valve closure, s runs from unity or whatever
partial
opening exists at the
beginning of the stroke down to zero.It is simple either
to increment
or to decrement the
value
of
s
progressively
but there are many other
different sorts
of
valve which
perform
different functions for which this simple
technique
would not be appropriate.
Examples of such valves are,
for
example,
the
pressure-reducing
valve which operates in such a
way
as to reduce the
pressure
downstream
of itself
to a
preset
value,
the
pressure-sustaining
valve which maintains
the
pressure
upstream
of itself above a
preset
value, valves which close or open
according
to the magnitude
of the
pressure,
the temperature of the flow,
or the flow
itself at some
other
point
in the
network communicated
to the valve's controls
using
some
form of
telemetry.
Far
more complicated types of control
are used
in
various
systems
in
which valves
are used
to control some
particrrlar
variable
such as the depth in
a tank or the
pressure
in a
pressure
vessel. A simple linear response to the difference
between a
control
variable and set
value may be used, but in others the s
value
is controlled
by
the magnitude
of the
time integral of this deficit.
In
all these cases,
the analysis can
be
carried
out
by
specifying
the
way
in which s
varies
with whatever
variable
controls
it,
and then,
by reference
to the array for
K, the
appropriate
value for K can
be
determined.
Once
the
value of K has
been found, the calculation
of
the heads and
velocities on
each side
of
the
valve
must
be undertaken. The
pipe
is first divided into two sections
at the
valve. The upstream
section
willcontain
a
Ax length
immediately
upstream of
the
valve
and
the downstream section
will contain a Ax length downstream of
the
valve. In the upstream
Ax length a
positive
characteristic will be
present
and,
similarly,
in the
downstream section a
negative characteristic will also be
present.
These two
characteristics,
together
with
the equation for the head
loss across the
valve, and the
continuity equation,
will
provide
a
solution of
all unknown
values.
At
point
Nthere
must
be an upstream Nand a downstream N, i.e. Nt and N2, as
there
are
two
values of head and two
values of
velocity
at a
valve
and
at time f * Ar the
apices
of
the two
triangles
must
be designated by Prand Prtorcpresent the two sides
of the
valve at this time
(Fig.
6.4).
The
two characteristic equations
are
,
hr,:
hs
*Or
@o-
u5
* F5)
therefore
h",
hp2:
h^-
hr-?
,",-%r
,r,*
?
,^
*
?
',
-|
n"-
f
r"
but
h",
hP2=#
and
and
uPr.
urr?
where
a,
is
the
cross-sectional
area of
the
upstream
downstream
of
the the
valve- So
*
rl*,
valve
Fig. 6.4.
c-,
*
(h",-
h*) +Dp,
-
DR * Fp
:
o
,
c
-:
- E
(hr,-
hr)
+
Dpz-rrs + lt
:
o
her
h^-%
(u",
-
u^
*
F^)
pipe
ry:v-(?.or',)',,
and
a2
is that
of
the
PiPe
138
where
Boundary
conditions
continued
lch.6
f:hn-lrs*ftr**?r"
Therefore
uu!,+
Fu",
*
y:0
-f;
r"-f
""
where
o:
(K/2g)
and
U:
(rr,.??)
The variable
up, can have
positive
or negative
values
according to the head difference
across the
valve.
This
means
that the value
u!, must
also change sign
with
the
value
of
necessary
to
repeat the calculation using the latest value
of u", that has been found. It
is unlikely
that
much error
will be introduced
by this
proceduie
as the velocity will
be
very
close tozero
anyhow; so
the
quadratic
term will be very
small.
In Fortran,
if this
is the language
being used, there is no function
for sign. It must be created by the
user. The
obvious
way to do
this
is to use
the little algorithm
sign equals
u/abs(u)
but
this is dangerous
because the time
when
sign really
makes a difference is when u is
very
close to zero. Atzero this algorithm will
fail in overflow;
so
it is necessary
to set
sign to
*
1 unless u is negative and so to avoid
the
problem.
6.3 TIIE
CALCI.JLATION OF
VARIABLES
AFFECTING THE
LIQT,ND BEING
TRANSPC'RTED
ALONG
TIIE PIPELII\IE
Two variables
that occur in the characteristic
equations are
very
often
treated as
constants.
These are the
Darcy
f
and the wave
speed
c. Both, in
fact,
are
highly
variable
and should be treated as such
in these
equations.
6.3.1
The
Darcy
f
This
occurs in
lhe
characteristic equations in the term zfululLtld. Again, remember
that in
the American
version
of this
term
the commonly
used
value
of/is
four
times
larger
than the British version;
so
the term is written
in the
USA
as
fulullM.
Below
a Reynolds
number Re of
2300
the
value
of/is
given
by 1.6lRe.
This
omits
consideration
of
the transition zone
between
Reynolds
numbers of 2C/JIG2800
but
this is
a
very
small
range and can be omitted. Assume
laminar flow
extends
up to a
Reynolds
number
of.2300 and
that turbulent flow
starts at this
value.
Although it is
most
unlikely
that
laminar
steady
flow will
occur in any
cornmercial
pipeline
it may
happen
that
during some
phases
of a
transient
the Reynolds number
may fall below
Sec.
6.3]
The
calculation
of
variables
affecting
the
liquid being
transported
139
conditions
that
then
exist
in the
pipeline,
it is
the
best
approximation
available
and it
is necessary
to supply
a
value
of
/for
the
Reynolds
numbers
below
2300
so
as
to be
able
to.oniin,r"
the ialculation
through
the
period
of time
that
quasi-laminar
flow
is
occurring.
When
calculating
the
Reynolds
number,
the
absolute
value of
the
velocity
must
be
used
and
not
the
veiocity
itself
as/and
Reynolds
number
do
not
carry
a
sign.
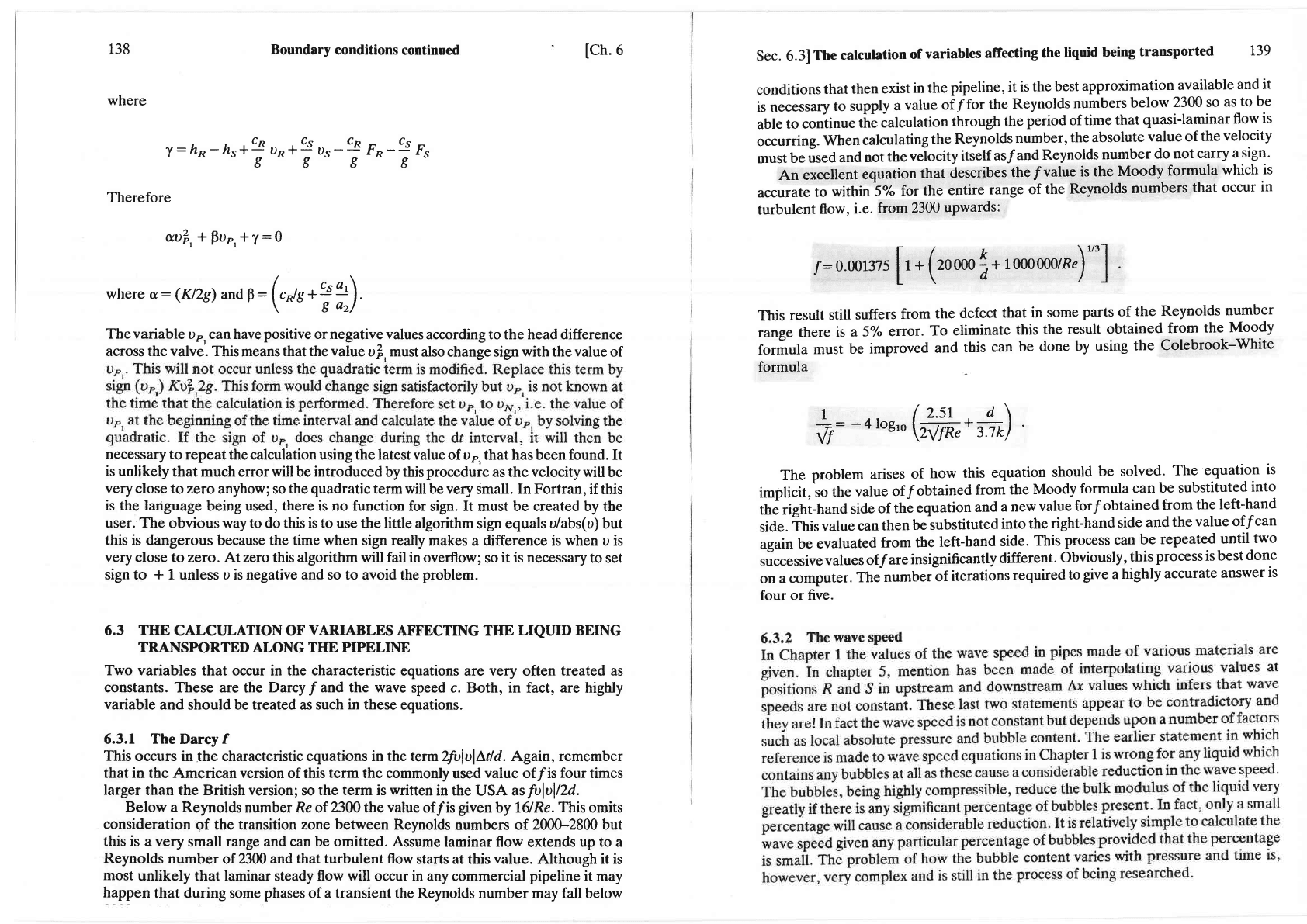
An
excellent
equation
that
describes
the/value
is the
Moody
formula
which
is
accurate
to
within
-5o/o
for
the
entire
range
of
the
Reynolds
numbers
that
occur
in
turbulent
flow,
i.e.
from
2300
upwards:
/=
0-001375
This
result
still
suffers
from
the
defect
that in
some
parts
of
the
Reynolds
number
range
there
is
a 5%
error.
To
eliminate
this
the
result obtained
from
the
Moody
formula
must
be
improved
and
this
can
be
done
by
using
the
Colebrook-White
formula
1 ..
{z.st
d\
rt:
-4
logls
\m*uo)
The
problem
arises
of
how
this
equation
should
be solved.
The equation
is
implicit,
so
the
value
of
/obtained
from
the
Moody
formula
can
be substituted
into
the righihand
side
of
thl
equation
and
a new
value
forf
obtained
frorn
the
left-hand
side.
This
value
can
then
beiubstituted
into
the
right-hand
side
and
the
value of/can
again
be evaluated
from
the
left-hand
side.
This
process
can
be
repeated
until
two
successivevalues
of/are
insignificantly
different.
Obviously,
this
process is
best
done
on
a computer.
Thsnumber-of
iterations
required
to
give a
highly
accurate
answer
is
four
or
five.
[t
-
(r*
to*roooooo/R,)"']

140
Boundary
conditions
continued
lch.
6
Let
the fractional bubble
content
at
the reference pressure
be
e
and the volume
of
the liquid
plus
the
gas
in the
bubbles
be V. The volume
of the
liquid will
be
(1
-
e)V
and the
volume
of the
gas
eV. Let
the reference pressure
be
p
and
let this
pressure
increase
by an amount
Ap. Assuming
that the
compression process
is isothermal,
then the
gas
volume will
become pl(p
+
L,p)eV
and the liquid volume
will
become
(1
-
e)(1
-
LplK)).V The
total
volume
becomes
(1-e)(1-(LplK)V
+
pl(p
+
Ap)eV.
Now, if. A,p is
small in comparison
withp
then
P
-
1
-r-LP
p+Lp
l+Lplp
p
so V becomes
(1-e)V(1
-
LplK)
+
(L-A,plp)eV.
The change
in
volume
thus becomes
l4l/K(l
-
s) +
elp)
Lp neglecting
second-order
small
quantities.
The
effective bulk modulus
thus
changes
according to the relationship
1
1-e
€
I
tt- K
-p'
Allowing for distensibility
effects
Usually K is so large and
e so small that
(1
-
e)lK can be
approximated
to l/K so
The density
of the liquid becomes
p(1
-
e). So
a-
L_
Therefore
Sec.
6.31
The calculation
of
variables
affecting
the
liquid
being
transported
(1
-
e)p
The
remaining
problem
now
is
to obtain
a realistic
value for
e.
At
atmospheric
pressure
there
wiilbe
a free
bubble
content
of eo.
When
the
pressure
changes,
this
bubble content
will
change.
There
will be
an increase
in
volume
of
the
bubbles
present
accompanying
the
pressure drop
which will
be
governed by
the
universal
gas
iaw. This
volume
chinge
can
be
very large
if the
drop
in
pressure is
large.
If the
pressure
drops
sufficiently,
more
bubbles
may
come
from
the
gas that
is
present in
iolution
in
the
liquid.
Evidence
is
growing that,
for
gas to come
out
of solution
sufficiently
rapidly,
on
the
time
scale
of
a
pressure transient,
to
produce
significant
contributions
to
the
bubble
content,
it is
necessary
for
the
pressure to
drop
below
a
certain
specified
value
-
the
gas release
head.
Reseirch
in
the
author's
laboratory
has
clearly
demonstrated
that
if
a liquid
originally
exposed
to,
say,
atmospheric
pressure for long
periods is exposed
to
a
low
sub--atmosphiric
pressure,
progressively
and
smoothly
applied,
gas
bubbles
will
evolve.
The
curve
of
the
fractional
volume of
gas
evolved
in the
time
/ is
plotted in
Fig.
6.5.
This sort
of
result
has
been
obtained
by
many
workers
in the
past
and is
well
fractional
volume
of
gas
Fig.6.5.
known.
The
names
of some
of
the
major
workers
in
the
field
are Epstein
and
Plesset,
a Jesuit
priest
Father
Fox
(not
the
author),
Schweizer
and
Harvey.
The
author's
ph.D.
stident,
Richard
Chilton,
was
able
to extend
this
work, filling
in
gaps in the
work
of
the
afore-mentioned
workers.
The
mode
of application
of
the
pressure
drop
makes
a considerable
difference
to the
result,
however
(Figs.
6.6
and
6.7).
Another
ph.D.
student,
Patricia
Dawson,
has
obtained
clear
and
certain
evidence
that,
if
a
pressure drop
is
applied
suddenly,
so
that
there
is
an
initial
downswing
of
pressure
to
i
level
consideraUty
U"to*
that of
the
final
pressure,
gas
release
may
occur.
Without
this
initial
downswing
no
gas release
occurs
in the
time
scale
of
pressure
transient
=--
phenomena.
It sr.rni
thai
the
initial
downswing
must
take
the
pressure
below
a
"-
r4l
(t".;.+")
1 1-e e D
-:-J--r-
K'
K'p TE
11eD
-:-+-+-
K'
K,
P'
TE
trme
K'
(1
-
e)p

742
pressu
re
0
trme
Fig. 6.6
-
Graph
of
pressure against
time for
a relatively
slow
pressure drop,
which
gives
negligible
gas
release
in the available
time.
Sec.
6.31
The
calculation
of
variables
affecting
the
liquid
being
transported
L43
6.3.3
Micronuclei
and
microcracks
Micronuclei
(Fig. 6.8)
have
been
mentioned
above
and
their
role
in
generating
Fig.
6.8
-
The
micronucleus
and
its
adsorbed
gas'
bubbles
within
the
flow
remains
to be
described.
If
the
simple
dynamics
of
a small
bubble
is
considered,
it
is easy
to
see
that
@
+
tp)ndz
-Pnd'
* ttdr
44
where
p +
Ap
is
the
pressure
within-
the
bubble,
p
is
the
external
pressure
and
t
is
the
coefficient
of
surface
tension
and
therefore
Boundary
conditions
continued
[ch.6
^p=+
pressu
re
Fig. 6.7
-
Graph
of
pressure against
time
for
a rapid
pressure drop to below
the
gas release
head,
which triggers
a much
larger continued
gas
release.
specific
value
if
gas is to
be
released
in a
time comparable
with that
in
which
we are
interested.
This
specific
value is
called
the
gas release head.This
is
explained
below.
To
grow a bu-bble
from
the nuclei
moving
within the
fluid
or
from
small
cracks
upon the
surface
of
the
vessel
which
contain
small
amounts
of
air,
a
pressure
difference
across
the
bubble
surface
must
exist.
where
R is
the
radius
of
the
bubble'
Imag
bubbles
present
and
which
is
subjected
tc
would
have
to start
its
existence
atzetorar
be
infinite.
This
would
cause
any
contain
ro
radius.
However,
if
it
may
be
assumed
ce
of
micronuclei
or
in
small
microcracks
this
problem
does
not
arise'
Adsorbed
gas
into
a
spherical
bubble
if
the
pressure
is
be
created
with
a
finite
radius
of
the
same
rnucleus.
Such
nuclei
can
be
found
in
most
neter
of
about
44
p'm some
people
think
l!1.",",
can
be
created
from
adsorbed
gas
on
a
nucleus
if
the
pressure
is
reduced
to
a
value
of
approximately
?'!
^
of
water
absolute
and,
once
the
nucleus
has
been
so
'potentiated;,
gas can-flow
into
the
bubble
from
the
main
uoav
of
the
fluid.
This
leads
to
the
idea
of
the
gas
release
head
mentioned
PreviouslY.
Microcract,
6ig.
6.9)
on
the
surface
of
the
containing
vessel
canoperate
in
the
Same
manner
as
nuclei,
as
any
carbonated
drink
demonstrates'
The
reader
is
reminded
of
how
lines
of
bubbles
rise
from
specific
sites
on
the
side
of
a
glass
after
the
first
rush
of
bubbles
(from ordinary
nuclei)
have
been
released'
These
specific
sites
are
microcracks.
trme
144 Boundary
conditions
continued
lch.6
Fig.
6.9
-
The microcrack
and its
contained
gas.
The author, in his
previous
book hydraulic
analysis
of unsteady
flow
in
pipe
networl<s has advanced a simple
theory
of how the value
of
e
could be
calculated
and,
whilst he
appreciates its defects,
he is
still
persuaded
that
this method
has much
to
recommend
it.
For a
pressurep
which
is
above the
gas
release pressure
head, the value
of e6 has
to
be adjusted to give the
expanded
or
compressed value
e
depending
upon the
magnitude
of the local pressure,
i.e.
e:
tsplp
uwhere
eo is the
fractional free
bubble
content in the
liquid at atmospheric pressure
pa.
For
a
pressure
p
which
is below the gas
release pressure
head the
fractional
free
bubble
content has
to be adjusted
according
to the
magnitude
of
the
pressure
relative
to atmospheric pressure
as
above, but,
additionally,
the
fractional volume
e, of the
dissolved
gas
content is assumed
to
come
out of solution
to be
expanded
or
compressed
in the
same
way
as
was
the
fractional
free
bubble content.
So
_
(eo
*
er)p
q--
.
P"
There
can be no doubt that
this assumption
is not completely
satisfactory but,
by
using
this approach,
very good
results have
been
obtained, which
have
been
verified
later by measurement
on site
when
the
scheme
analysed was
constructed.
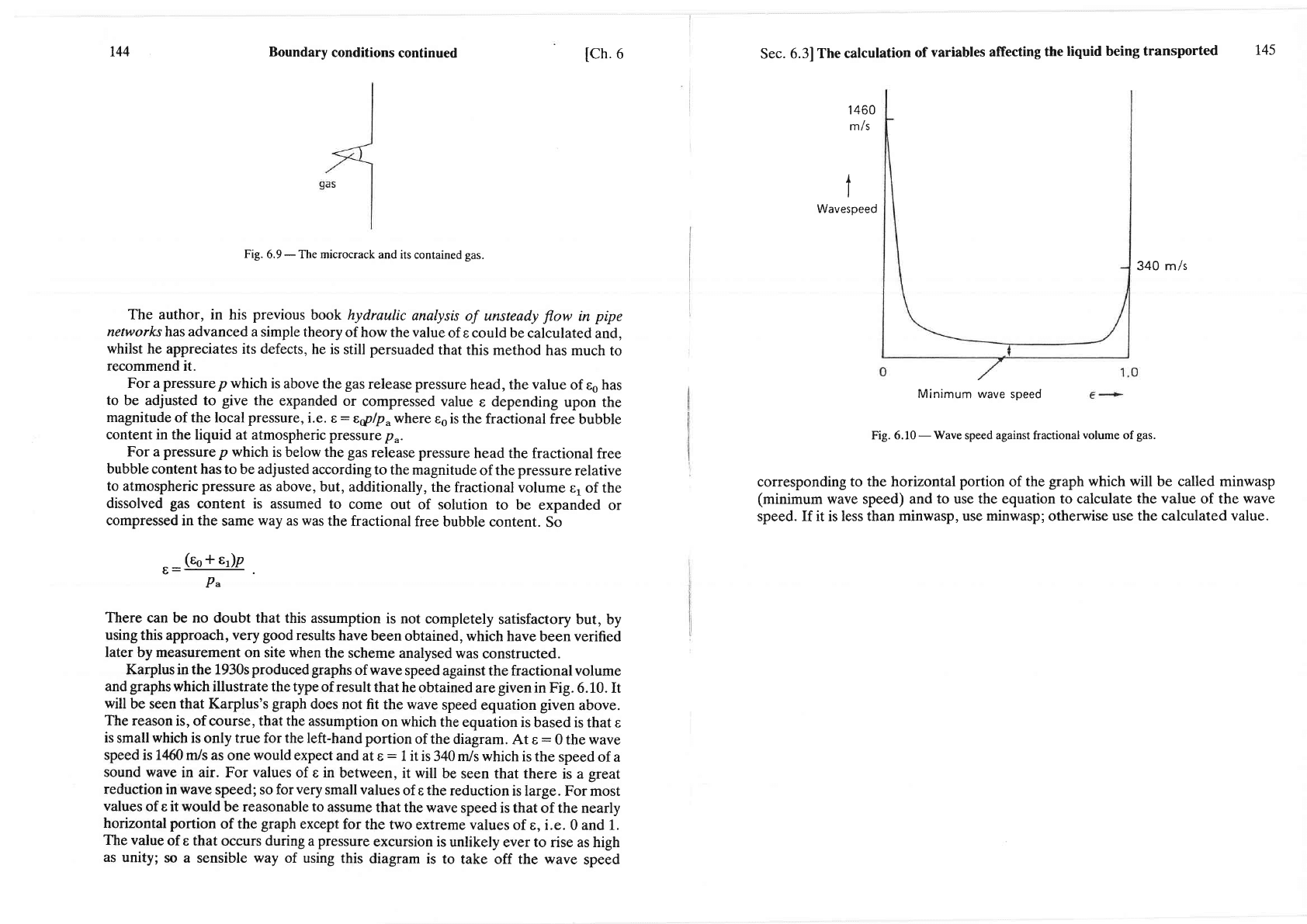
Karplus in the 1930s
produced
graphs
of wave
speed
against the fractional volume
and
graphs
which
illustrate the type
of result
that
he obtained
are
given
in
Fig. 6.10. It
will
be seen that Karplus's
graph
does
not fit
the wave
speed
equation
given
above.
The reason
is, of course, that the assumption
on which
the
equation
is based is
that e
is
small
which
is
only
true for the left-hand
portion
of the
diagram.
At
e
:
0 the wave
speed is 1460 m/s as
one
would
expect
and at
e
:
1 it
is 340 m/s which
is the
speed
of a
sound wave
in air. For
values
of
e
in
between,
it will
be
seen that there
is a
great
reduction
in
wave
speed; so for
very
small values
of
e
the
reduction
is large. For
most
values
of
e
it would
be reasonable to
assume
that the wave
speed is that
of
the
nearly
horizontal
portion
of the
graph
except for
the two
extreme values
of
e,
i.e.
0
and L.
The value
of
e that occurs during
a
pressure
excursion is
unlikely
ever to rise as high
as
unity;
so
a sensible
way
of using
this
diagram
is
to take off the wave
speed
Sec.
6.3]
The calculation
of
variables
affecting
the
liquid being
transported
1460
m/s
I
I
Wavespeed
340 m/s
Minimum wave
soeed
Fig. 6.10
-
Wave
speed against fractional
volume
of
gas.
corresponding
to the horizontal
portion
of the
graph
which
will
be called minwasp
(minimum
wave speed) and
to use the equation to calculate the
value
of the
wave
speed. If
it
is
less than minwasp,
use minwasp;
otherwise
use the calculated value.
145
Sec.
7.21
The
continuity
equation
r47
where b.
is
the
surface
width
of
the
channel.
This
equation
states
that
the
rate
of
change
in
flow
over
a unit
length
of
the channel
is equal
to the
rate of
change
in
storalge
of
the
flow
within
a
unit
length
of
the
channel.
Alternatively,
this can
be
stateJ
as
the
flow
that
enters
the
Ar
length
either
leaves
it at
its
downstream
end
or
is
stored
within
the
length
by an
increase
in
the depth.
The
negative
sign
is
introduced
to
take care
of
the
fact
that
an
excess
of
inflow
(a
negative
value of 0(av)/0x)
must
equal
the
rate
at
which the
volume
of storage
is made
available
by the
rise in
the
surface
level
over
the
length
of
the
Ar.
As this
is
positive,
a negative sign
must
be
introduced
to
make
the equality
possible.
Differentiating,
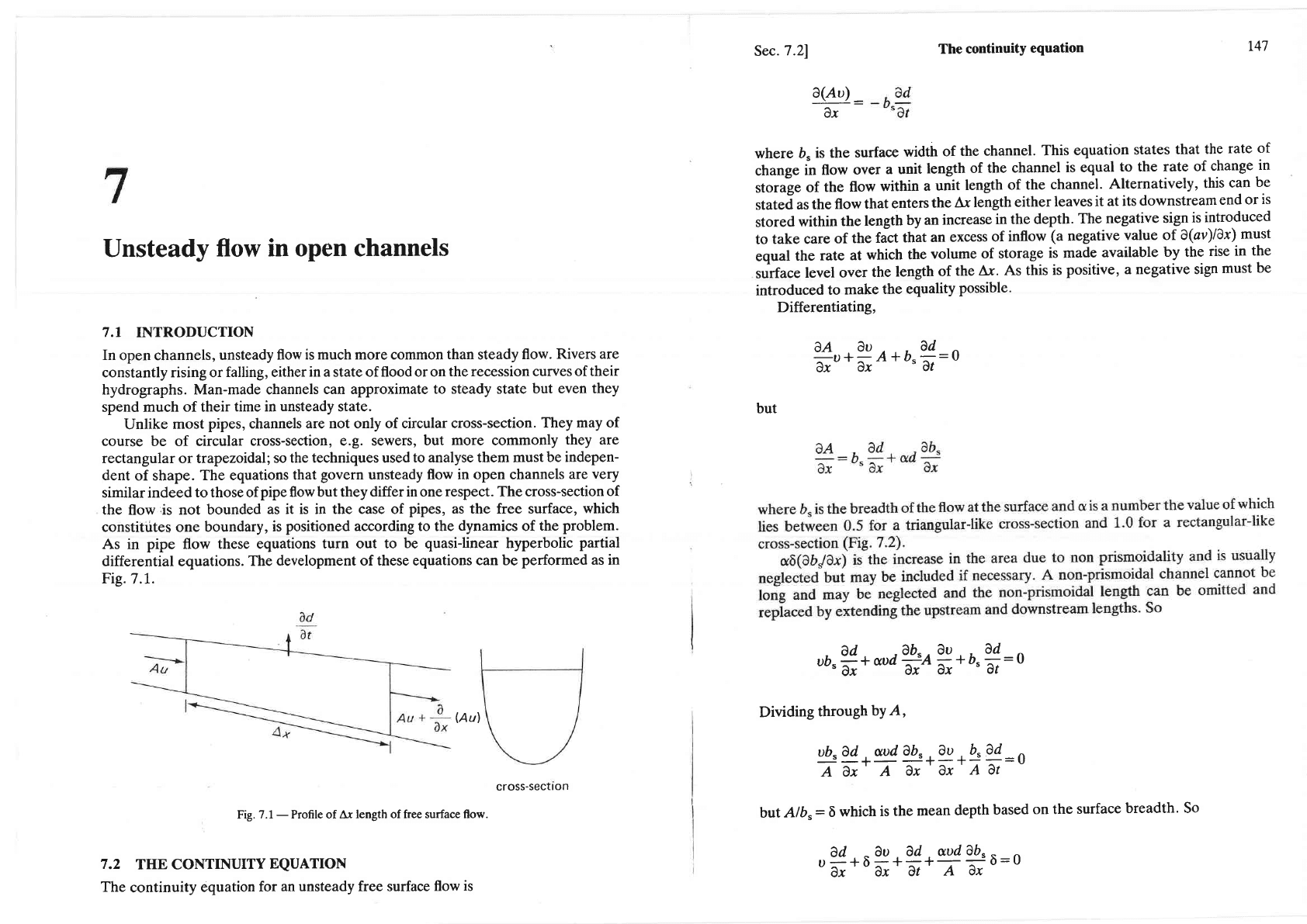
Unsteady
flow
in open channels
7.I
INTRODUCTION
In
open channels,
unsteady
flow
is much more common
than
steady
flow.
Rivers are
constantly rising or
falling, either
in a
state
of flood or on
the recession
curves of their
hydrographs. Man-made
channels
can approximate
to stOady state
but even they
spend much
of their
time in
unsteady
state.
Unlike
most
pipes, channels are
not
only
of circular cross-section.
They may of
course
be of circular
cross-section,
e.g. sewers,
but more commonly
they are
rectangular or trapezoidal;
so
the techniques used
to analyse them must
be indepen-
dent
of
shape.
The equations
that
govern
unsteady
flow in open channels
are
very
similar indeed
to those of
pipe
flow but they
differ in one
respect.
The
cross-section
of
the
flow
,is
not bounded
as it is in the case of
pipes,
as the free surface,
which
constittites one
boundary,
is
positioned
according to the
dynamics
of
the
problem.
As in
pipe
flow
these equations
turn out to
be
quasi-linear
hyperbolic
partial
differential
equations.
The
development of these equations
can be
performed
as in
Fig.7.1.
(Aul
Fig.
7.1
-
Profile of Ar
length of free surface flow.
7.2
THE CONTINUITY
EQUATION
The
continuity
equation
for
an unsteady free surface
flow
is
0(.4u):
0x
ff,**n*u"#:o
*a%y#*r,
ff=o
but
Dividing
through
by
A,
but
Alb,:
6
which
is
the
mean
depth
based
on the
surface
breadth. so
-ad
uD"
6*
ad
u-*0
dx
ub,Od
*aud
abs+99*4
!:O
AOx'A
dx'Ox
A)t
0u
Ad
quddb"
#*a+
o
du:o
cross-sectlon
a
+Eg
148
Non
prismoidol
rectongle
-lrke
chonnel
Ea=BEa+aEa
Fig.7.2.
but c
:
V(g6)
where c is the celerity
of a small
wave on the surface of stationary
fluid.
Therefore
Sec.
7.31
The dynamic
equation
t49
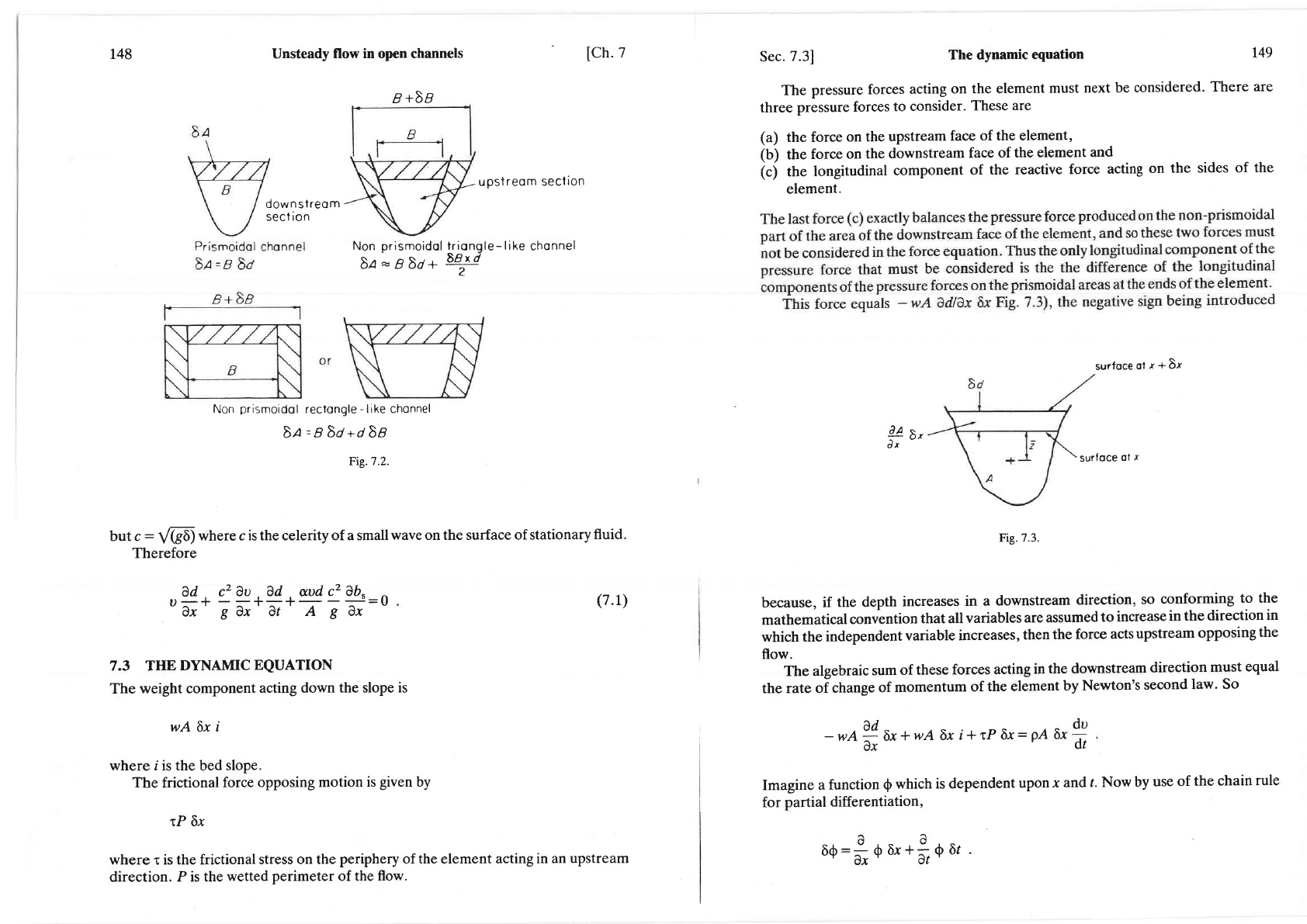
The
pressure
forces
acting
on
the element
must
next be
considered.
There are
three
pressure
forces
to
consider-
These
are
(a)
the force
on
the
upstream
face
of the element,
(b)
the
force
on
the
downstream
face
of the
element
and
(c)
the
longitudinal
component
of
the
reactive
force
acting
on
the sides
of
the
element.
surfoceotr+Er
surfoce
ol
r
Fig.7.3.
because,
if
the depth
increases
in
a downstream
direction,
so
conforming
to the
mathematical
convintion
that atl
variables
are
assumed
to
increase
in
the
direction
in
which
the
independent
variable
increases,
then
the force
acts
upstream
opposing
the
flow.
The algebraic
sum
of
these forces
acting
in
the downstream
direction
must
equal
the
rate of
change
of
momentum
of
the element
by
Newton's
second
law.
So
-wA
6x*wA6xi*rp6x:pA6r
du
dt
Imagine
a function
S
which
is dependent
upon
x and
r. Now
by
use
of
the
chain
rule
for
partial
differentiation,
Unsteady
flow in open channels
downstreom
secl
ion
upstreom
section
lch.
7
Non
prismoidql
triongle-
| ike
chonnel
6a'* BSd+
ff
!t,
dx
Ad
c2 0u Ad
q,ud
cz 0b"
'ar*;ar*ar*
AE ar:u
(7.1)
7.3 THE
DYNAMIC
EQUATION
The
weight component
acting down
the slope is
wAExi
where
i is the bed slope.
The
frictional
force opposing
motion
is
given
by
rP 6x
where
r
is the frictional
stress on the
periphery
of
the
element
acting
in an
upstream
direction.
P is the
wetted
perimeter
of the
flow.
ad
0x
DO:*
O
D'**
06r

Sec.7.4l
The
characteristic
forms
151
150
Unsteady
flow
in open
channels
lch.
7
(7.2)
(7.1)
(7.2)
Dividing
through
by
6r,
60:40
6x*00
6r
ax
&'r
dt
'
Replacing
S
by
u, and
as 6l/6r,
when
taken to
the limit,
is
u,
then
du
0u
0u
A:
ar
'*
a,
Substituting
this
result
into
the
equation
under
consideration
and
dividing
through
by
wA 6x
gives
Ad,
tP
uOu,10u
:__
Ox'
'
wA
g}x'
g
0t
rplwAisrlwmwhere
z
is
the
hydraulic
mean
depth
and
this term
is
denoted
byi;
so:
ad
u0u
10u
-+--+--+r-I=u
Ox
gOx g0t
'J
This equation
is
more
often
written
as follows.
ad
Q*A
* E:o
I
a**u
ar
or
where
E:
s(j-i).
The
two
equations,
known
as
the Saint
Venant
[15]
equations
are:
ad
c2 0u
ad
U-*-:-*=-:U,-dx
80x
0t
ad
9*9*E:o
.
I
ar*'a*
at
that
occurs
in channel
flow
problems,
there
are
certain
complications
in
the
use of
the
channel
flow
equations
that
do
not
arise
with
the
waterhammer
equations-
7.4
THE CHARACTERISTIC
FORMS
First
multiply
equation
(7.1)
(the continuity
equation)
by
8:
ad
,r! +4:o
.
Suar+c
or
ot
Next
multiply
equation
(7.2)
(the dynamic
equation)
by
c:
Ad
0u
0u
,s
ia
us
i*
,
u*
E:0
Add
the
two
equations:
/ a a\ /
a a\
('+,)
*.;)
gd+c
(r.*,);.;)
u*cE-o
On
p.
000
it
was shown
that
d0
d,r
a0
,
a0
dr
dt
0x
0t
For
the
very special
condition
that
dxldt=
u
*
c the
previous
equation
can
be
written
as
t
*r+'#
*cE-o
.
These equations
can
be
solved
for
a channel
by
a
variety of
finite
difference
methods
some of
which
will be
given later.
It is
possible
to
obtain
their
characteristic
forms
quite easily,
and
it
will
then
be
seen
that
these
equations
are exactly
the
same
as the
waterhammer
equations
and
the
same
techniquer
is
*"t" used
to solve
the
waterhammer
problem can
be
employed
to
solve the
uniteady
channel
flow
problem.
Because
of
the much
lower
wave
speed
(7.3)
Examining
the
(d/d|kd) term,
it equals
g(ddJdt and
as
8A:
b'6d
it follows
that
ddtdt:
(lib,)
@eni.This
implies
thit
d6:
dd
and
for
a
prismoidal
channel
this
is
correct.
The
term
thus
becomis
(g/b,)
(dAldt). When
the
whole
equation
is
divided
by c
the
term
becomes
(g/b.
Q@ent
and,
as c2:
86
and
6
:
Alb",
then
the
term
reduces
to
(cl
A)(dAl
dt.
The equation
therefore
is
cdA
du
;i
*;
*
E:o
Subtracting
the
two
modified
versions
of equations
(7.1) and
(7.2)
gives a slightly
different
result.
r52
Unsteady
flow in
open channels
lch.
7
For
the special condition
that dxldl
-
u
-
c the resulting equation can be written
AS
Generally
(7.4),
Q.aa\
and
(7.s), (7.sa)
Another
version
of this
equation can be obtained by another
manipulation of
the
first
term in
equations
(7.5)
and
(7.5a).
Reconsidering equation
(7.3);
the first
term is
(dldt)(gd). gd:
c2 andthe
differential of c2 isZc(dcldr)
so
the equation becomes
2dc du
&
+a*u-0.
Sec.
7.61
SuPercritical
flow
("'
-f.)#.ix*E:o
153
(7.e)
All these
forms apply to channels of
any
prismoidal
cross-section.
The integrated form of
the last equation is sometimes
preferred:
u+2c* Et:a
constant.
Another form of
equations
(7.4)
and
(7.5)
is
sometimes
preferred
because
it is
claimed to be more conservative.
It uses A and
Q
as
variables
instead of
u and ^A.The
equations
are
When u: c,the
flow
is said
to be in critical
state. When
u is less than
c, it is said
to
be
in subcritical
state
and,
when u
is
greater than c, it is said
to
be in supercritical
state.
Other
terms have
been
used in
the
past
such
as tranquil
or streaming
flow
for
subcritical
flows
and shooting
or torrential
for supercritical
flow. This terminology
is
rapidly
becoming
obsolescent.
7.5 SUBCRITICAL
FLOW
In subcritical
flows,
waves
travel
faster
than
the liquid itself;
so they can
progress
in
either
direction,
i.e.
both
upstream
and
downstream.
For this
reason a disturbance
in
a
flow can travel
in
both
directions,
causing
changes
in
velocities and depths.
The
profile
of
such
a flow
is determined
by
conditions
both
upstream and
downstream.
The boundary
conditions
at
both ends
of a reach
have their effect
upon
the
reach.
Note that
a reach
is a section
of
channel
in
which
properties
such
as roughness,
bed
slope
and cross
section
are
constant.
7.6 STJPERCRITICALFLOW
In
supercritical
flows,
waves travel
slower
than the
liquid
and are
unable to
progress
upstream.
In
such
cases
the
flow is only
affected by
upstream
conditions.
There
is an
important
qualification
to
this statement:
the
waves being
discussed
are
infinitesi-
mally
small
waves
and
what has
been
said
certainly applies
to
these. However,
a
travelling
surge
(or
moving
hydraulic
jump)
can travel considerably
faster
than
such
a
wave, having
a
larger
celerity,
and such
waves may travel
in either
direction
if
the
degree
of supercriticality
of
flow is
not sufficiently
large.
In
waterhammer,
the
acoustic
wave
speed is
far larger
than the
velocity of
the
liquid, c:
1400
m/s and
u usually
does
not exceed
3 m/s,
so the
Mach
number
of
the
liquid
is
very small
and
always
far
smaller
than
unity.
(The
Mach
number equals
u/c.)
There
can
be only
the
smallest
possibility of having
a supersonic
flow.
(The
possibility cannot
be
dismissed
completely
because the
author
has heard of
very
high
ipeed
liquids,
delivered
through
pipelines
of
small diameter,
and
used to cut
metal
and
ceramics.
The
pipelines used
are
very short
and small
and
operate
under
very
large
pressures
and
are
in
no
way typical
of any other
sort
of
pipeline.) 40
years
ago
the Froude
number
was
defined
as
being
uzlg} because
when it appears
in
expres-
sions
it almost
always
occurs
in this
form.
Nowadays,
because
of the similarity
of
free
surface
flow
to compressible
bounded
flow
(the
analogy
between
the two
is total
and
perfect) the equivalent
number
to
the
Mach number
in free surface
theory
-
the
Froude
number
-
is
written
as u/c
where
t:
VF
or
Dt{gd.
As the
slopes
of the
characteristic
lines
arc dtldx
:
ll(u
+
c) the
two types
of
flow
give very different
patterns in the
t
versus.r space.
In
subcritical
flow the
positive
iharacteristic
has a
positive slope
(dtldt:ll(u +
c)) but
the negative
characteristic
has a
negative
slope
(dtldx:
Il(u
-
c))
because c is
greater than
u. In supercritical
-;#*#*
E:o
dx
a:
u*'
cdA du
tzil
*t * E:0
Also,
d.r
E:,
lC
,
9trdt
+ E:o
dt-
-
dt
(7.6)
(7.6a)
(7.7),
(7.7a)
d.r O
-72!
7
dt A--
'
(7.8)

154
Unsteady
flow
in
open channels
'
[ch.7
positive
slope
as u
is
about subcritical
and
flow both the
positive and the
negative characteristics
have
greater
than
c.
This, of course,
infers the statements
made
supercritical
fl ows above.
Two important
points
emerge
frorn Figs.7.4 and7.5.
XR
Fig. 7.5
-
Supercritical
flow.
(1)
The
interpolative
procedures used to establish
the
velocity
and celerity
values at
points
R and S in
sub-critical
flow
must calculate the
values
in
the upstream
and
the downstream
Ax
values
respectively and in supercritical flow
they must
both
be
calculated
in the
upstream
A.r.
(2)
When
the flow
is supercritical,
the solution
of
the upstream boundary condition
cannot use
any
characteristic
equations
but,
when the
flow is subcritical,
the
negative
characteristic
is
used,
7.6
CHARACTERISTICS
WITHOUT THE
E
TERM
In
near-horizontal
channels
with very small friction, i andT
are
nearly
zero; so the
E
term can,
under these
circumstances,
be neglected. Alternatively,
when a flow
is at
near uniform
flow conditions
the
value
of
i
-
jis
very
small
so that, again,
E can
be
neglected. Under
these
conditions
it becomes
possible
to make
predictions
which
cannot be
made if
the
E term
has to be taken into account.
In the
earlier
sections
of
this chapter it
is shown
that
the characteristic
equations can be written
D-C
If.
E L,t can
be
treated
as
negligible
then
the equations
reduce
to
o+k:
a constant,
From
these
results,
valuable
relationships
can,
very
easily,
be deduced-
Along
a
positive
characteristic
line,
u *
Zcis
constant.
Similarly,
along
a
negative
characteris-
tic line
the
u
-2c
term
is
constant.
Consider
the
area
ABCD
in
Fig.
7
.6 made
up
of the
intersections
of
two
C*
and
two
C-
characteristics.
C*
familY
Fig.7.6
-
Frictionless
characteristic
plot.
Along
the
C-characteristics,
u ^
-Zc,
:
u^
-2c^
Sec.
7.61
Characteristics
without
the
E
term
155
dr
--:lt*c
dt
and
u-2c+ELt:
aconstant,
P
-"T\
,/l\
rl\r
XR
N S Y
Fig.7.4
-
Subcritical flow.
P
11
,1,
d.r
a-
d-r
.:-:DAC
dt
N
zone
of
quiet
dt
1
dx
n0*t0
u*2c*ELT=aconstant,