Fox J.A. Transient Flow In Pipes, Open Channels And Sewers
Подождите немного. Документ загружается.

76
The method
of
characteristics
I
dh
,
du
,
2/ulrrl
J.!-n
cdt dt d
+&
(t
"-
h*) *
up-r*
*
fu19d4-
o .
'
c
.'--
'-K/
-
r
-.(
d
Along SP the negative
characteristic
equation applies:
fch.3
Generallv
and
dJ
ts*c
When
the
positive
sign
is
used, a characteristic
line in
a
t-x
space is obtained, of
gradient
tl(u+c), and along which
the expression
(g/c)dhldt*duldt+Zfululld
is
zero. When the negative
sign is used, a negative
characteristic
line is
produced
in
the
r
versus.r
spare along which the
expression
-
(glc)
(dhldt*
duldt+Zfululld
is zero.
Some
analysts refer to these
two characteristics
as forward
and backward characteris-
tics because the
positive
characteristic
line has a
positive
slope and information is
carried forward in an
x increasing direction
but, a negative
characteristic
usually has
a negative slope which
carries information
backwards
in an x decreasing direction.
There are
quite
a number
of circumstances in which
a negative
characteristic can
carry information
in an x-increasing
direction;
so the author does not
favour the
forward and backward
definitions.
Sorne
analysts
use the
phrase'world
line'in
place
of characteristic and this seems to be
a
practice
from the
world
of
physics.
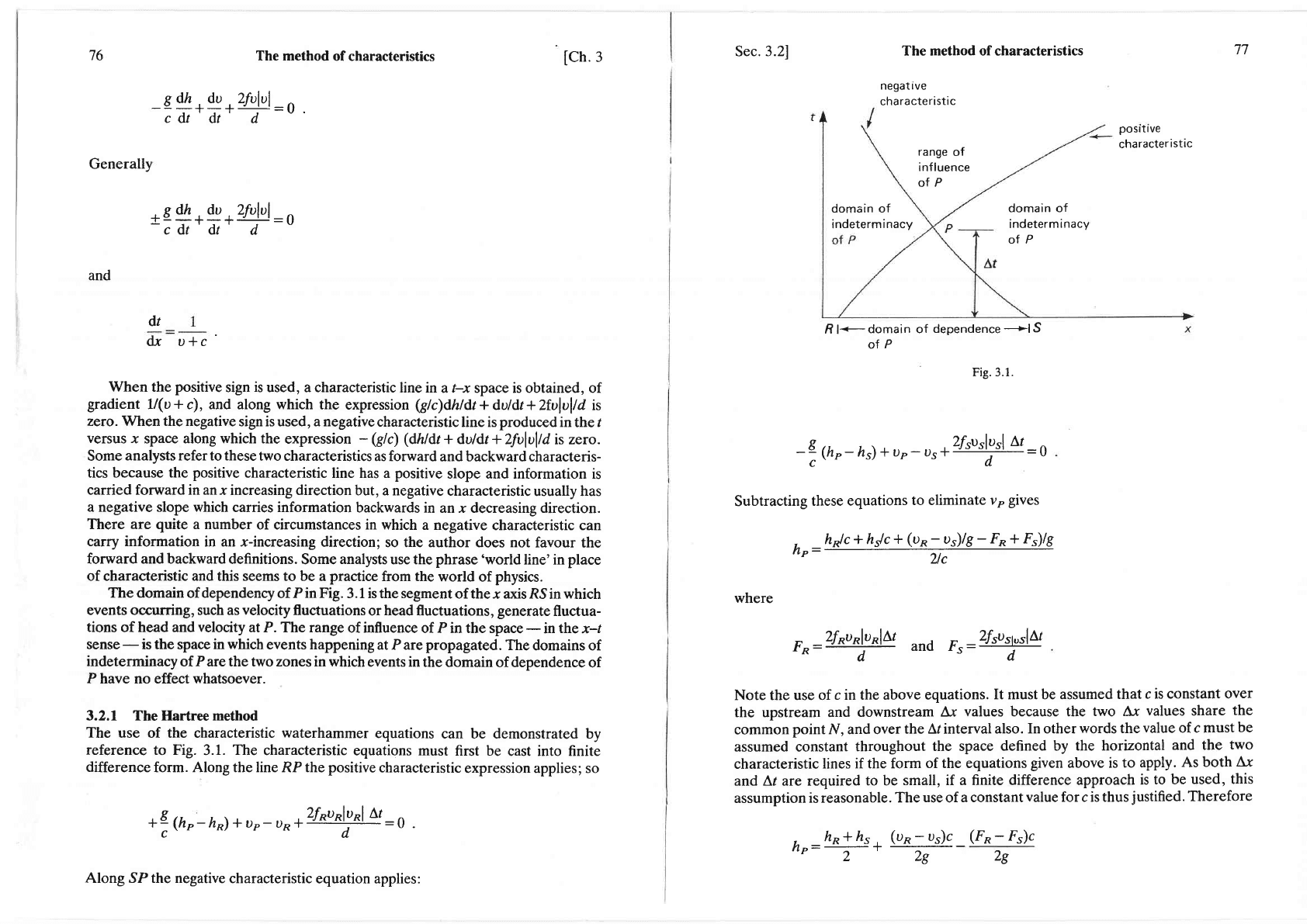
The domain
of dependency
of
P in Fig.
3. 1 is the segment
of the
x
axis
RS in
which
events occurring, such as
velocity
fluctuations
or head fluctuations,
generate
fluctua-
tions
of
head and
velocity
at P. The range
of influence
of P in the space
-
in
the
r-r
sense
-
is
the
space
in which
events happening
at P arc
propagated.
The
domains of
indeterminacy
of
P
are the two zones in which
events in
the domain
of dependence
of
P
have no effect whatsoever.
3.2,1 The Hartree method
The
use of the characteristic
waterhammer
equations
can be demonstrated by
reference
to Fig.
3.1.
The
characteristic
equations must
first be
cast into finite
difference
form. Along the line RP the
positive
characteristic
expression applies; so
#9!+9e+
4ul:o
-cdt
'dr'
d
dt
Sec.
3.21
The method of characteristics
negat
lve
characteristic
77
fr
l+-
domain of
dependence
----->lS
ofP
Fig. 3.1.
-E
@r-
hr) *
t)p-r, +
&lldA:
o
c
,''.
'-J' ',
-r -r '
d
Subtracting
these equations
to eliminate
v
"
gives
,
h*lc + hlc
*
(u^
-
us)/g
-
FR + Ft)lg
'u,
where
F
Zf*u*lu*lLt
.^:T
and
"r:rynE
Note the use of
c in the above
equations.
It must be assumed
that
c is constant
over
the upstream and
downstream
A.r
values because the
two A.r
values
share
the
common
point
N, and over
the Ar interval also.
In other
words the
value
of c must
be
assumed constant
throughout
the space
defined by
the horizontal
and the
two
characteristic
lines
if the form
of the equations
given
above is
to apply.
As
both
Ax
and Ar are required
to be
small, if a finite
difference approach
is
to be
used, this
assumption
is reasonable
. The
use
of
a constant
value
for c is thus
j
ustified
. Therefore
(F"
-
fr)c
posrtrve
characteristic
range
of
inf luence
oIP
domain of
indeterminacy
domain of
indeterminacy
ofP
,
h** h,
,
(u^
-
u5)c
np:a-
-
Zg
2g
78
and
up:
DR
*f
<n,
-
h^)
-
FR .
If
hR,
y'ls,
D.* and
u5 are
known
then
F^
and
F,
can be
calculated
and
the values
of. h"
and
up
can be
determined.
A
complete
technique
of
analysis
can
be
based
on the
solutions
given
above.
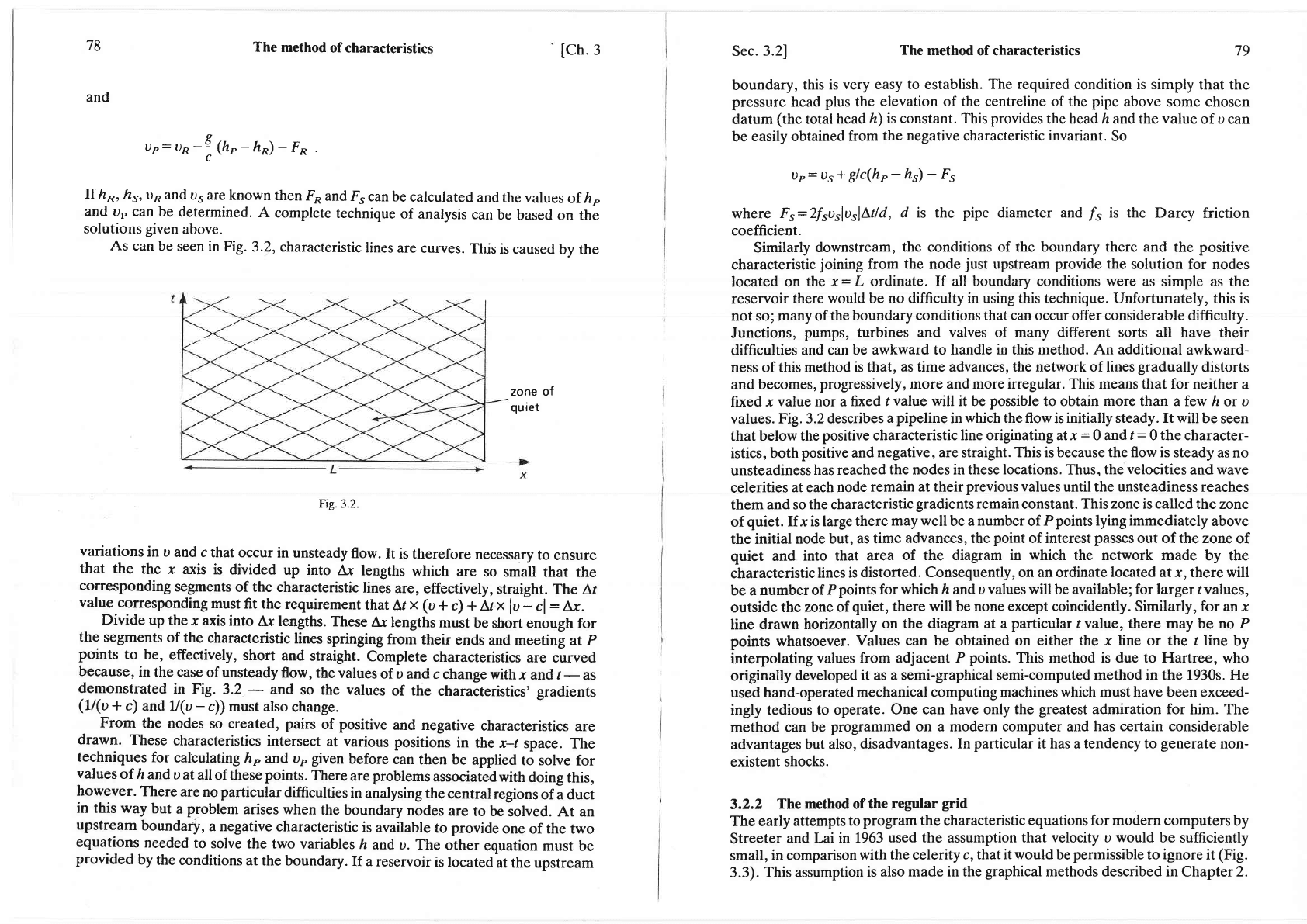
As can
be
seen in
Fig.
3.2., characteristic
lines
are
curves.
This
is
caused
by the
zone
of
quiet
Fig.3.2.
variations
in u
and
c that occur
in unsteady
flow.
It is therefore
necessary
to
ensure
that
the
the r axis
is
divided
up into
A.r
lengths
which
are
so small
that the
corresponding
segments
of
the
characteristic
lines
are,
effectively,
straight.
The
Ar
value
corresponding
must
fit the
requirement
that
at
x
(u
+
c) + arx
lu
-
cl
:
Ax.
_
Divide
up the.r
axis
into
Ar lengths.
These
Ax
lengths
must
be
short
enough for
the
segments
of the
characteristic
lines
springing
from
their
ends and
rneeting
at
P
points
to
be,
effectively,
short
and
straight.
Complete
characteristics
are
curved
because,
in the
case
of unsteady
flow,
the values
of u
and c
change with
r and I
-
as
demonstrated
in
Fig.
3.2
-
and
so the values
of the
characteristics'
gradients
(l/(u
* c)
and ll(u
-
c)) must
also
change.
From
the nodes
so created,
pairs
of
positive
and
negative
characteristics
are
drawn.
These
characteristics
intersect
at various
positions
in
the
x-r
space.
The
techniques
for
calculating
hp and u" given
before
can
then be
applied
to solve
for
values
of
ft and
u at
all of
these
points.
There
are
problems
associated
with
doing
this,
however.
There
are
no
particular
difficulties
in
analysing
the
central
regions
of i duct
in this way
but
a
problem
arises when
the
boundary
nodes
are
to
be
solved. At an
upstream
boundary,
a negative
characteristic
is
available
to
provide
one
of
the
two
equations
needed
to
solve
the two variables
h
and u. The
other
equation
must be
provided
by
the
conditions
at
the boundary.
If a
reservoir
is locatedlt
the upstream
Sec.
3.21
The
method
of characteristics
boundary,
this is
very easy
to
establish. The required condition is simply
that the
pressure
head
plus
the
elevation of the centreline of the
pipe
above some chosen
datum
(the
total
head
h) is constant. This
provides
the head h and the
value
of
u
can
be
easily obtained
from
the negative
characteristic
invariant.
So
Dp: Ds
+
glc(h,
-
lt")
-
fs
where
Fs:2f5uslutltt/d,
d is the pipe diameter and
.fr
is
the
Darcy
friction
coefficient.
Similarly
downstream,
the
conditions
of the boundary there and
the positive
characteristic
joining
from
the
node
just
upstream
provide the
solution
for nodes
located on
the x:
L ordinate. If all boundary conditions
were
as
simple as the
reservoir
there
would be no difficulty in using this technique. Unfortunately,
this is
not so; many of
the boundary
conditions that can occur
offer
considerable
difficulty.
Junctions,
pumps,
turbines
and valves of many different sorts all
have their
difficulties
and can
be awkward to handle
in
this method.
An additional
awkward-
ness of this
method is
that,
as
time advances, the network of lines
gradually
distorts
and
becomes,
progressively, more and more irregular. This means that for
neither a
fixed x
value
nor a fixed
r
value
will
it be
possible
to obtain
more
than a few /r
or
u
values. Fig.3.2 describes
a
pipeline
in
which the flow
is
initially steady. It will
be
seen
that
below the
positive
characteristic
line originating at x
=
0 and
r:
0 the character-
istics, both
positive
and
negative, are
straight.
This is because the flow is
steady as no
unsteadiness
has reached
the nodes in these locations. Thus,
the
velocities
and wave
celerities
at each node
remain at their
previous values
until the unsteadiness
reaches
them and so
the characteristic
gradients
remain constant. This
zone
is
called
the zone
of
quiet.
If x
is large
there
may well
be a
number
of
P
points
lying immediately
above
the initial
node but,
as time
advances, the
point
of interest
passes
out of the zone
of
quiet
and
into that
area
of the diagram in
which
the network made
by the
characteristic
lines
is
distorted. Consequently, on an ordinate
located
at x, there will
be a number
of
P
points
for
which
h and
u
values
will
be available; for
larger
fvalues,
outside
the
zone of
quiet,
there
will
be
none except
coincidently. Similarly, for an x
line
drawn horizontally
on
the
diagram at a
particular
t value, there may
be no P
points whatsoever.
Values
can be
obtained
on either the x line or the r line
by
interpolating
values
from
adjacent
P
points"
This
method
is due to Hartree,
who
originally
developed
it
as a semi-graphical semi-computed
method in the
1930s. He
used hand-operated
mechanical
computing machines which must
have
been exceed-
ingly tedious to operate.
One can have only
the
greatest
admiration for
him. The
method
can be
programmed on a modern computer and
has certain considerable
advantages
but also,
disadvantages.
In
particular
it has a tendency to
generate
non-
existent
shocks.
3.2.2
The
method of
the
regular
grid
The early
attempts
to
program
the
characteristic
equations for modern computers
by
Streeter
and
Lai in 1963
used the
assumption
that
velocity
u
would
be
sufficiently
small, in comparison
with
the
celerity
c, that it
would
be
permissible
to ignore
it
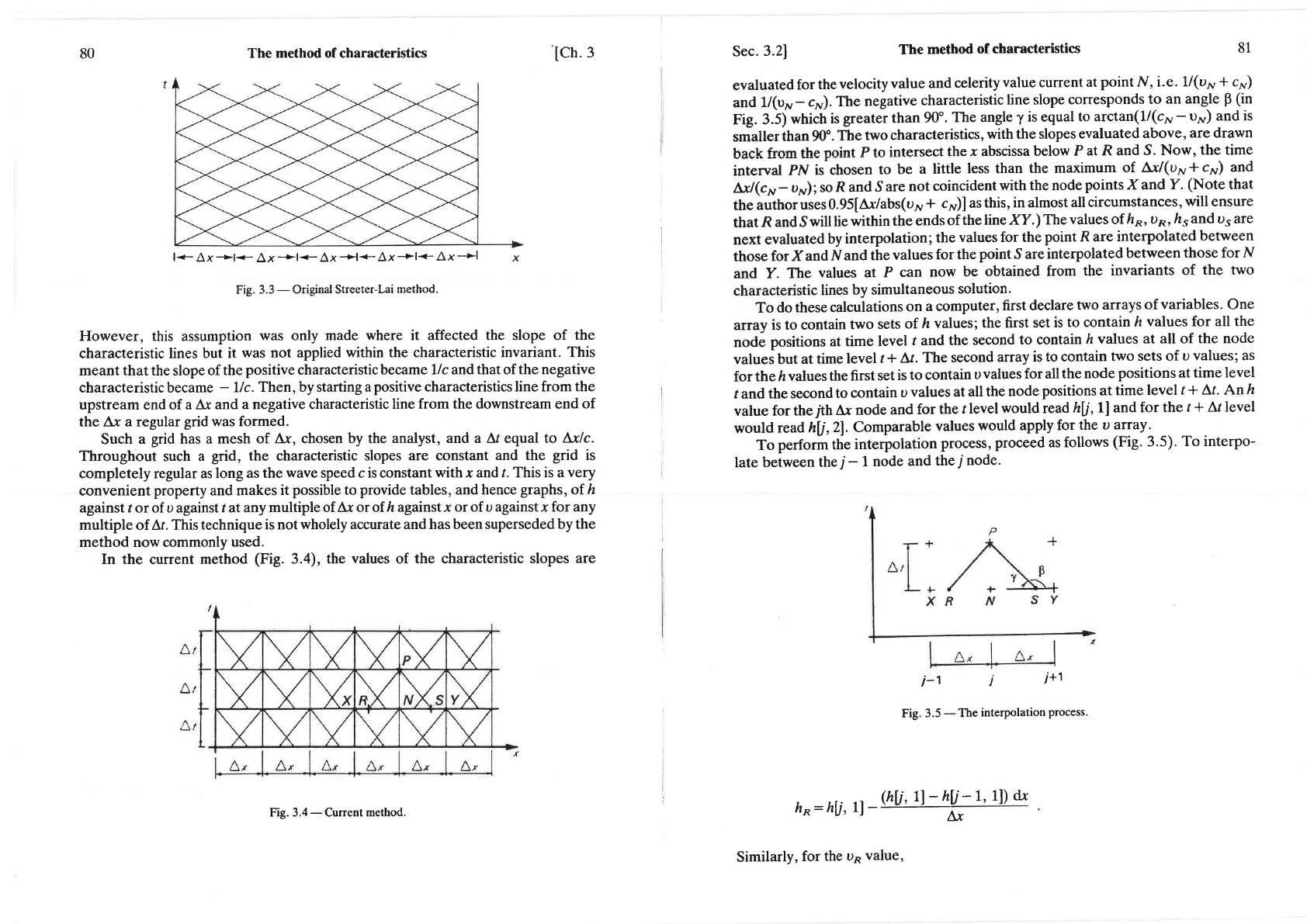
(Fig.
3.3).
This assumption
is
also made in the
graphical
methods described in
Chapter
2.
The
method
of characteristics
lch.
3
t9
80
The method of characteristics
lch.3
l<-
Ax
+l<-
Ax
-->l+
[26
+l+-
[;
-->la-
Ax
-+l
x
E:^ 2 2 |.\-:-:-.1 Qfraa+ar I oi ma+hnA
L 16. J.J
-
VrlSrlrq 9llvvavl-Lsr
urvrrruv-
Flowever, this assumption
was only
made where it affected the slope of
the
characteristic lines
but it
was not
applied
within
the
characteristic invariant. This
meant that the slope of
the
positive
characteristic
became llc and
that
of
the negative
characteristic became
-
Llc. Then,
by starting a
positive
characteristics line from
the
upstream end of
a A.r and
a negative characteristic
line from the
downstream
end
of
the Ax a regular
grid
was
formed.
Such
a
grid
has a
mesh of
Ar, chosen by the analyst,
and a Al equal to
Lxlc.
Throughout such
a
grid, the characteristic slopes
are constant
and the
grid
is
completely regular as long
as the
wave
speed
c is constant
with
x
and t. This is a
very
convenient
property
and makes
it
possible
to
provide
tables, and
hence
graphs,
of
lr
against/orof uagainst
tatanymultipleof
Ax orof hagainstxorof
uagainstxforany
multiple of Ar. This technique
is not
wholely accurate and has been superseded
by the
method now commonly
used.
In the
current
method
(Fig.
3.a),
the
values
of
the
characteristic
slopes
are
Fig. 3.4
-
Current
method.
Sec.
3.21
The
method
of characteristics
evaluated
for
the
velocity
value and
celerity
value
current
at
point N, i.e.
l/(ur * crv)
and 1/(ur-
cru).The
negative
characteristic
line slope corresponds
to
an angle
p
(in
Fig. 3.5)
which
is
greater than
90".
The
angle
1
is
equal
to arctan(ll(c7,-
u,v) and is
smaller
than 90o.
The
two
characteristics,
with the slopes
evaluated
above,
are drawn
lrack from the ooint P to
intersec-t
the x abscissa below
P at
R and
S. Now,
the time
interval
PN
is chosen
to
be
a little
less than
the maximum
of
Axl(ur
* cn') and
Lxl(cv1-
uN);
so
R and.S
are
not
coincident
with the node
points Xand Y.
(Note
that
the
author
uses 0.95[luu/abs(u,
+ c,u)]
as
this,
in almost
all circumstances,
will
ensure
thatRandSwillliewithintheendsof
theline
XY.)Thevaluesof
ftR, un,hsandu5are
next
evaluated
by interpolation;
the
values for the
point R are
interpolated
between
those
for X and
N and
the
values
for the
point .S
are interpolated
between
those for
N
and
Y. The
values at
P
can
now
be
obtained
from
the
invariants
of
the two
^l- ^ -^ ^+^-i^+i ^ li-^^ l^.' ^i-"1+a na^rrc cnlrrfinn
Ullall alutEl
lDLllv
llllgJ
trJ
Dllllurlallvvuo
ovrslrvrr'
To
do these
calculations
on
a computer,
first declare
two
arrays
of
variables.
One
array
is to contain
two
sets
of
lr values;
the first set
is
to contain
lr
values
for all the
nodi
positions
at time
level
t and
the
second
to contain
/r values
at all
of the node
valueJ but
at time
level
t +
N.
The
second
array is
to contain
two
sets of
u
values; as
for the
lr
values the
first set
is
to contain
u
values for all
the node
positions
at
time level
t
and
the second
to
contain
u
values at
all the
node
positions at time
level
t + Lt. An
h
value
for thelh
Ax
node
and
for
the
t
level
would read
h[i,1]
and
for the
t + Lt level
would
read
hlj,2].
Comparable
values
would
apply for
the
u array.
To
perform ttie
interpolation
process,
proceed as follows
(Fig.
3.5).
To interpo-
late between
thei
-
1
node
and
the.,1node.
i-1
j+1
Fig. 3.5
-
The
interpolation
process.
81
h^: h[i,
\-(hU'
tl-
W
1'
1])
dr
Similarly,
for
the
u^
value,
uR:
uU,11
-
(u['r' 1]
-
u[/'-
t
'
tl)
ar
where dx
:
dr(ull,
i
j
+ cU,
1i).
To
interpolate
between
the
j
node
and the
j
+ 1 node,
hs:hli,yW
Similarly,
for
the
urvalue
ut:u[',tt*W
the d.r
value for this
case
is
given by
dx
:
0r
(c[j
,
1]
-
U,
1l).
Introducing
an
integer
value
s,
to denote
either
* 1
or
-
1,
these six
expressions
can be
reduced
to three
expressions
only.
These
are
rhfi,
1l
-
hlj
-
s,
1])
d-r
hnrs
:
h[j,
1l
r.rr
(rU,
1l-uff-s,
1]) dr
uRts:ugrLl-T
and
dx:
dt
(r[,],
1]
+ scff,
1l)
where
s:
1 is
used
when
the
equations
are
applied
to a
positive characteristic
and
s
:
-
1
when
the equations
are-
applied
to
a negative
characteristic.
Subscript
^R/S
denotes either
subsCript
R or
subscript
S
according
to
whether
s:
L or s
=
-
L'
Then
,-
_h*+
hs
+(u^
* us)cr
-
(F^
-
Fr)ct
nP:-r--T-
u
and
Dp: un
-t
fo"
-
h^)
-
FR
'
It is
quite easy
to write
a subroutine
for a computer
program
which
willperform
these
calculations
systematically,
progressing
through
the
length
of
a
pipe
for
any
given I
Sec. 3.21
The method of characteristics
level
and calculating
the
corresponding
values
at nodes on
the t
+
Lt level.Of
course,
it
will
be
necessary
to
calculate the
values
of
all slowly
varying
parameters before
performing the above
subroutine. Such
slowly
varying
parameters are the
Darcy
/
values
and
the wave speed
c. The
wave
speed
can
vary because
the presence of
air,
or
^-,, ^+L^- -^^ :- +L^ ll^"il ^o- ^Lo--a flra rrrqrra c^aarl .ranr nnncirlarqhlrr
'I-n
Gnrl nrrf
4rry U|lut;r
64D,
ru LttI'/
rrYuru vqlr wrrcrrSw
rlrv wqvv Jlrvvs
tvrJ
vvrroruvr 4vrJ.
f v rrrre
vs!
how
to calculate
these
values, see
p.
139 for the
variation
in
/
and
p.
140
for
the
variation
in c.
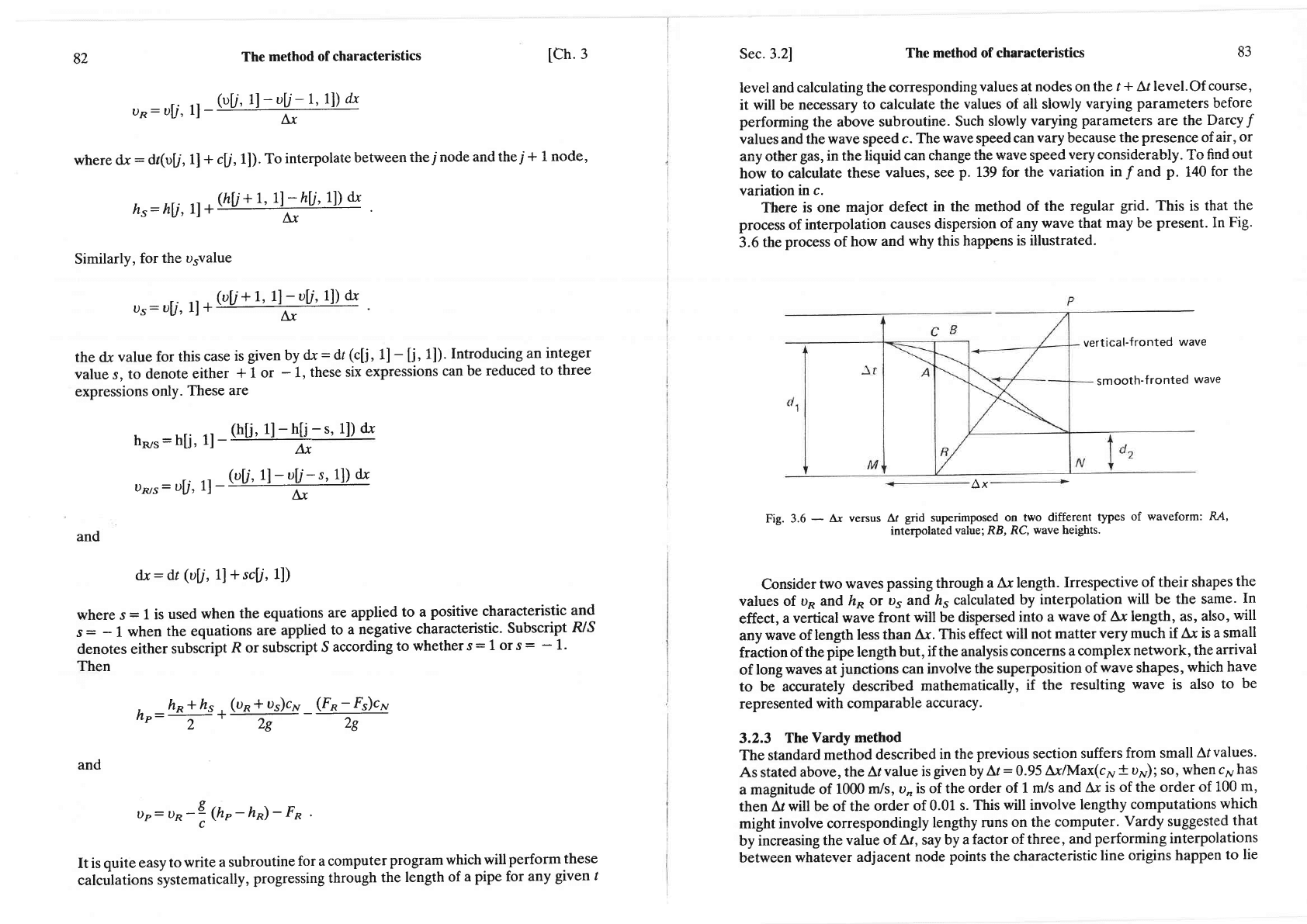
There
is one
major
defect
in the method of
the
regular
grid.
This
is
that
the
process
of
interpolation
causes
dispersion
of any
wave that
may be
present. In
Fig.
3.6
the
process of how
and
why
this
happens
is illustrated.
Ax
Fig. 3.6
-
Ar
versus Ar
grid
superimposed
on two
different
types
of
waveform:
R.A,
interpolated
value; RB, RC
wave heights.
Consider
two
waves
passing
through
a Ax
length.
Irrespective
of
their shapes
the
values of
u^ and hp
or
Ds and h5
calculated
by
interpolation
will be the same.
In
effect,
a vertical
wave
front
will be
dispersed
into a
wave of
Ar length, as,
also,
will
any
wave of length
less
than
Ar. This
effect
will not
matter
very
much
if Ax is
a small
fraction
of
the
pipe
length
but,
if the analysis
concerns
a
complex
network,
the
arrival
of long
waves at
junctions
can involve
the superposition
of
wave
shapes,
which have
to be accurately
described
mathematically,
if the
resulting
wave is
also
to
be
represented
with comparable
accuracy.
3.2.3
The
Vardy
method
The standard
method
described
in
the
previous
section
suffers
from small
Atvalues.
As
stated
above,
the
Ar
value is
given
by
Ar
:
0.95
AxlMax(cr
t ur); so,
when
cr
has
a magnitude
of
1000 m/s,
u,, is
of the order
of
1 m/s
and Ax
is of the order
of
100
m,
then
Ar
will be of the
order
of 0.01
s.
This
will
involve
lengthy
computations
which
might involve correspondingly
lengthy runs
on the
computer.
Vardy suggested
that
by increasing
the
value of
At, say by
a factor
of three,
and
performing interpolations
between
whatever
adjacent
node
points the characteristic
line
origins happen
to
lie
The
method of
characteristics
lch.
3
83
82
vertical-fronted
wave
smooth-fronted
wave
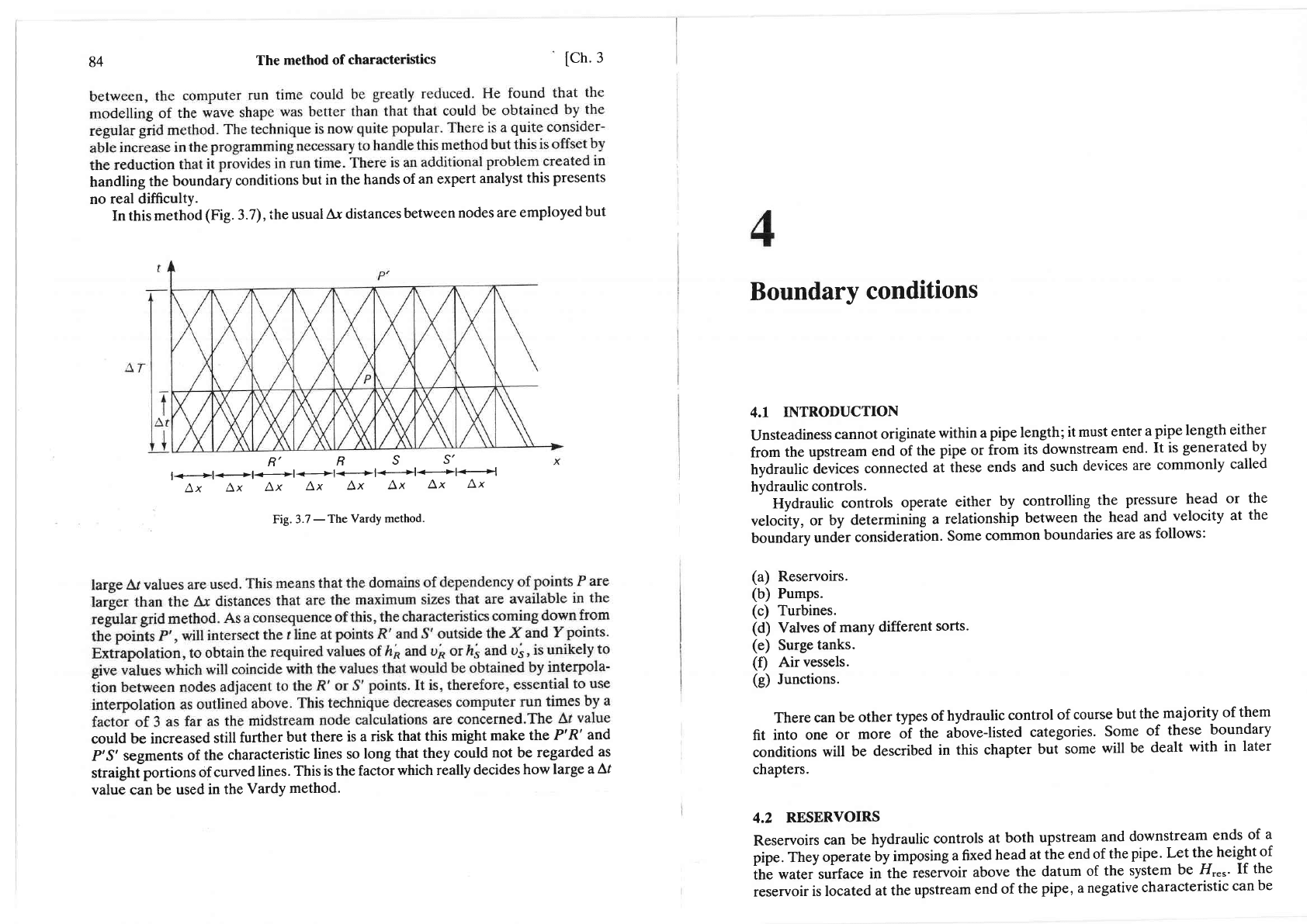
84
The
method of
characteristics
lch.
3
handling
the
boundary
conditions
but
in
the hands
of an expert
analyst
this
presents
no
real difficulty.
In
this method
(Fig.
3.7),
ihe
usual
Ax distances
between
nodes
are employed
but
R'RSS'
|
<----->l+------+
l<----->l
<--->l
<--=>
l+---+l+----+l<-->1
Ax
Ax
Ax
Ax
Ax
Ax
Ax
Ax
Fig. 3.7
-The
VardY method.
could
be increased
still
further
but there
is a
risk
that this
might
make
the
P'R'
and
P'.S'
segments
of
the
characteristic
lines so
long
that
they could
not b€
regarded
as
straighiporrions
of
curved
lines.
This is
the factor
which really
decides
how
large
a
Ar
value can be
used in
the
Vardy
method.
Boundary
conditions
4.I
INTRODUCTION
Unsteadiness
cannot
originate
within a
pipe length;
it must
enter
a
pipe
length
either
from
the
upstream
enO
of
the
pipe
or
from
its downstream
end.
It
is
generated
by
hydraulic
devices
connected
ai
these
ends
and
such
devices
are
commonly
called
hydraulic
controls.
Hydraulic
controls
operate
either
by controlling
the
pressure
head
or
the
velocity,
or
by
determining
a relationship
between
the
head
and
velocity
at
the
boundiry
under
consideration.
Some
common
boundaries
are
as
follows:
(a)
Reservoirs.
(b)
Pumps.
(c)
Turbines.
(d)
Valves
of
many
different
sorts.
(e)
Surge
tanks.
(f)
Air
vessels.
(g)
Junctions.
There
can
be
other
types
of
hydraulic
control
of
course
but
the
majority
of
them
fit
into one
or
more
oi
th"
above-listed
categories.
Some
of
these
boundary
conditions
will be
described
in this
chapter
but
some
will be
dealt
with
in
later
chapters.
4.2
RESERVOIRS
Reservoirs
can
be
hydraulic
controls
at
both
upstream
and
downstream
ends
of
a
pipe. They
operate
by
imposing
a fixed
head
at
the end
of
the
pipe.
Let
the
height
of
ihi
watersurface
in
the-reservoir
above
the datum
of
the
system
be
I/....
If
the
reservoir
is located
at the
upstream
end
of
the
pipe,
a negative
characteristic
can
be
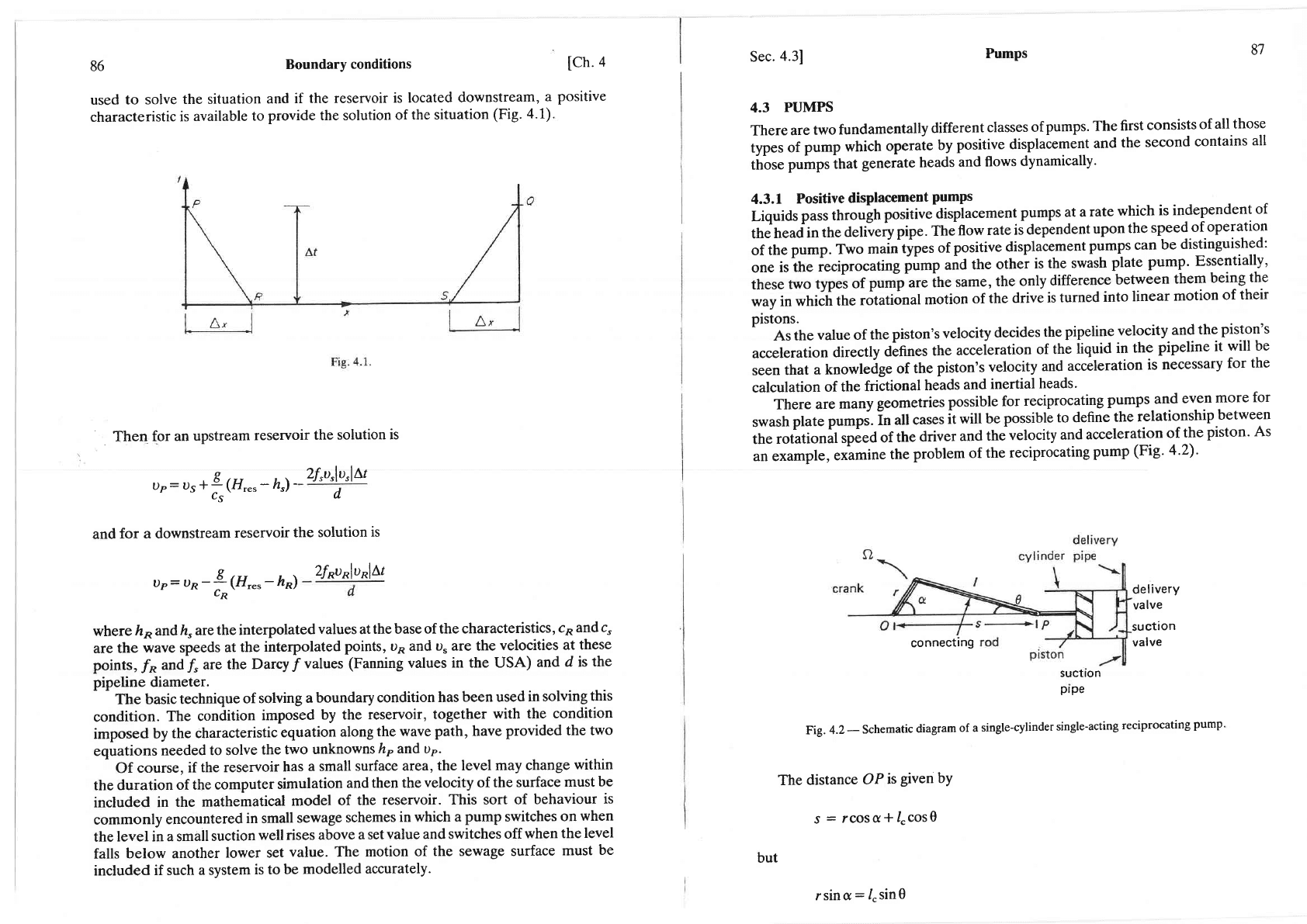
86
Boundary
conditions
used
to solve
the situation
and
if
the reservoir
is located
downstream,
a
characteristic
is
available
to
provide
the solution
of
the situation
(Fig. a.1).
lch.4
positive
Then
for
an
upstream
reservoir
the
solution
is
a 2f,u"lu,lAr
Dr:
us
*
9
(F/..,
-
hrl
-
-'
d
and
for a downstream
reservoir
the
solution
is
t)P:
uR-
fttn,*-
h^)
2f^u^lu^l[t
where
hpandh,aretheinterpolatedvaluesatthebaseofthecharacteristics,cpandc'
are
the
wave
speeds
at
the
interpolated
points, u^ and
Ds are the
velocities
at these
points,
f
*
and
f,
arc
the
Darcy
/
values
(Fanning
values
in the USA)
and
d is
the
pipeline
diameter.
The basic
technique
of
solving
a
boundary
condition
has
been used
in solving
this
condition.
The
condition
imposed
by the reservoir,
together
with the condition
imposed
by
the
characteristic
equation
along
the wave
path,
have
provided the two
equations
needed
to solve
the
two
unknowns
h, and u"-
Of
course,
if
the reservoir
has
a small
surface
area,
the level
may change
within
the
duration
of the
computer
simulation
and
then the
velocity
of
the surface
must
be
included
in
the mathematical
model
of
the
reservoir.
This sort
of behaviour
is
commonly
encountered
in small
sewage
schemes
in
which a
pump
switches
on
when
the
level in
a small
suction
well rises
above
a setvalue
and switches
off
when
the
level
falls
below another
lower set
value.
The
motion
of
the sewage surface
must
be
included
if such
a system
is to
be modelled
accurately.
Pumps
87
4.3
PUMPS
There
are
two
fundamentally
different
classes
of
pumps. The
first
consists
of all
those
types
of
pump
which
op"rui"
by
positive
displacement
and
the
second
contains
all
tirbse
pumps that
generate
heads
and
flows
dynamically'
4.3.1
Positive
displacement
pumps
Liquids
pass throuih
positive
dispiacement
pumps
at a
rate
which
is
independent
of
the
head
in
the
deli"very
pipe. The
flow
rate
iJ
dependent
upon
the
speed.of
operation
of the
pump.
1*o
rnuin
types
of
positive
displaiement
pumps
can
be
distinguished:
one
is
ttre
ieciprocating
pu*p
und
ttt"
othei
is
the swash
plate
pumP'
Essentially'
these
fwo
typei
of
pum-p^ar"
ih"
same,
the
only
difference
between
them
being
the
way
in
whiih
the
rotational
motion
of the
drive
is
turned
into
linear
motion
of
their
pistons.
As
the
value of
the
piston's
velocity
decides
the
pipeline
velocity
and
the
piston's
acceleration
directly
defines
the
acceieration
of
the
liquid
in
the
pipeline
it
will be
seen
that
a knowleige
of
the
piston's
velocity
and
acceleration
is necessary
for
the
calculation
of
the
frictional
heads
and
inertial
heads'
There
are
many
geometries
possible
for
reciprocating
pumps-and
even
more
for
swash
plate
po-pr.
in
all cases
ii
will
be
possible
to
define
the
relationship
between
the
rotationit
spieO
of
the
driver
and
the
velocity
and
acceleration
of
the
piston'
As
an example,
eximine
the
problem
of
the
reciprocating
pump
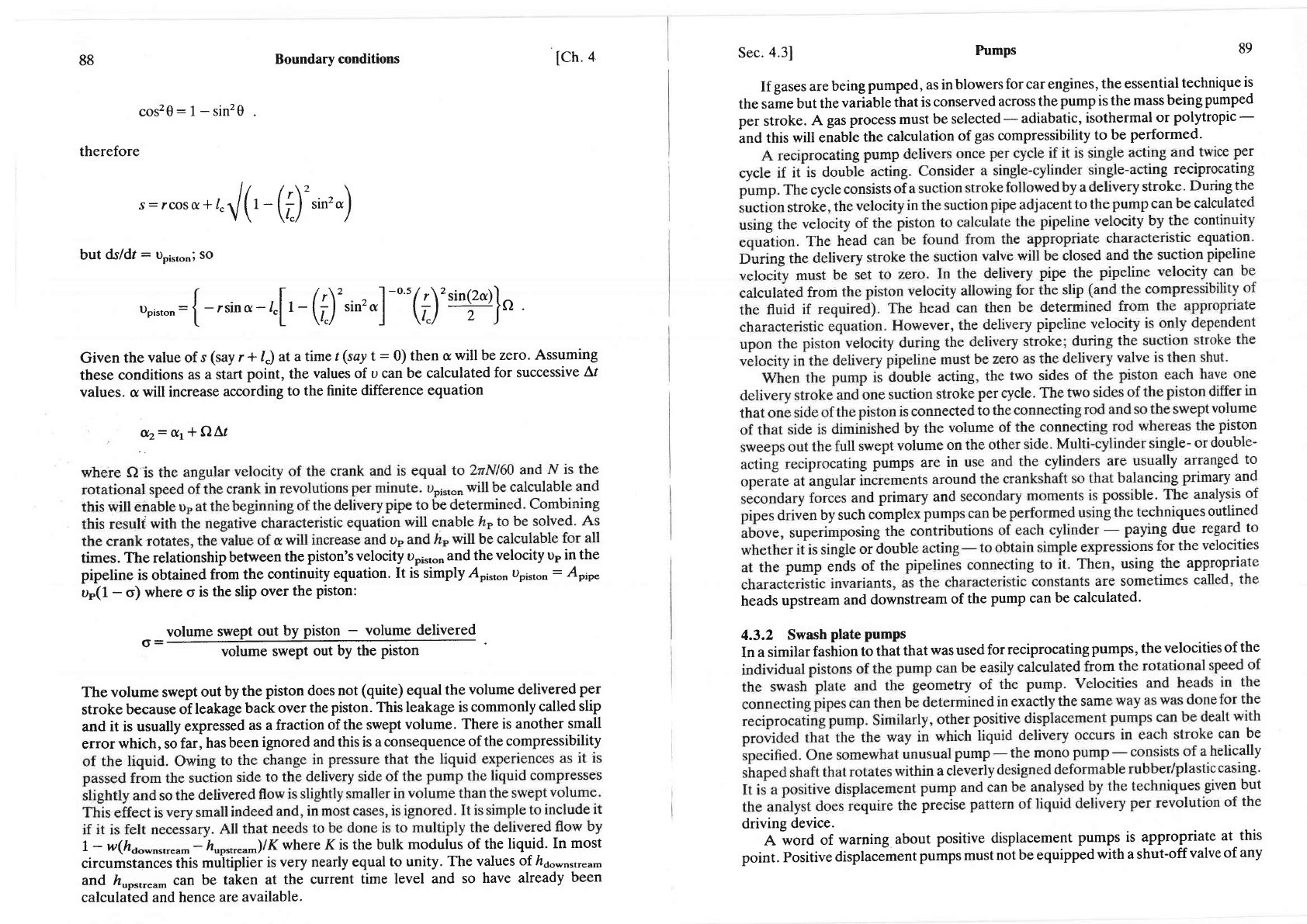
(Fig. a.2).
Sec.
4.31
delivery
valve
suction
valve
suctron
ptpe
Fig.
4.2-
Schematic
diagram
of a
single-cylinder
single-acting
reciprocating
pump'
The
distance
OP
is
given bY
s
:
rcosc*/"cos0
connecting
but
rsins:/.sin0
88
cos2e-1-sin20
therefore
Boundary
conditions
lch.
4
r:rcos
u*t,J(t
-
(;)'
,into)
but
ds/dr:
Dpistoni s0
(
|
(;)','"'"]-"(i)'$"e")L]',
Dpiston:t-rsins-tLt-
Given
the
value of
s
(say
r
+ l)at
a time
t
(say
t
:
0)
then a
will
be
zero.
Assuming
these conditions
as
a start
point,
the
values of u can
be calculated
for successive
Al
values.
a
will increase
according
to the
finite
difference equation
o::
or+
QAI
times.
The relationship
between
the
piston's
velocity upiston
and the
velocity up
in the
pipeline
is obtained
from
the
continuity
equation.
It
is
simply
Api,to,,
upiston
:
Apip"
up(l
-
o)
where o
is
the slip over
the
piston:
volume
swept
out
by
piston
-
volume
delivered
o=
.
The
volume
swept
out
by
the
piston
does
not
(quite)
equal
the
volume delivered
per
stroke
because
of
leakage
back
over the
piston.
This leakage
is commonly
called
slip
and
it is usually expressed
as
a fraction
of
the swept
volume. There
is
another
small
error
which,
so
far,
has
been
ignored
and this is
a consequence
of
the
compressibility
|
-
w(hoownsrream
-
fr,,o.,r."*)/K
where
K is the bulk
modulus
of
the liquid.
In
most
circumstances this
multiplier
is
very nearly
equal
to unity.
The
values
of /too*.stream
and
lz.,o.,ream
can
be
taken
at
the
current
time
level and
so
have already
been
calculated and hence
are available.
Sec.
4.31
Pumps
89
If
gases are
being
pumped,
as in blowers
for car engines,
the
essential
technique
is
the
same
but
the
uatiiUt.
that
is conserved
across
the
pump is
the mass
being
pumped
per stroke.
A
gas
process
must
be selected
-
adiabatic,
isothermal
or
polytropic
-
and
this
will enable
the
calculation
of
gas
compressibility
to be
performed.
heads
upstream
and
downstream
of
the
pump can
be
calculated.
4.3.2
Swash
plate
pumps
In
a similar
fashion
tb that
that
was used
for
reciprocating
pumps, the
velocities
of
the
driving
device.
A
word of
warning
about
positive displacement
pumps is appropriate
at
this
point.
Positive
displacernent
pumps must
not
be
equipped
with
a shut-off
valve of
any
Boundary
conditions
lch.
4
sort
unless
a
pressure
relief
valve
upstream
of it
and downstream
of
the
pump
has
been fitted.
This type of
pump
will
continue
to
deliver
flow irrespective
of
the
resistance
of the
pipe
network
as such flows
are
dependent
only
upon the
rotational
speed
of the
pump and not upon the
valve's
setting.
Either such
pumps
will burst
their
associated
pipework
or
their
motors
will be stalled,
with
consequent
risk
of
burn-out
due
to the excessively
high
torques
presented to them if downstream
valves
are closed.
Electric motors
driving
positive displacement
pumps
should
be equipped
with
therrnal
trips or
some
other
cut-out
device
and the
pump
should
have a
burst
disc
or
pressure relief
valve
fitted
on
the delivery
side.
Great
care should
be
taken
in
choosing their
rotational speed
because,
unless they
have
a
sufficiently
large
number
of cylinders,
high rotational
speeds
will
generate big transients
in
the
pipework at
every
rotation with consequent
risk of bursting.
Single
acting cylinders
are more
prone
to
this than are
double
acting
cylinders.
It is
recommended
that
all
schemes
using
positive
displacementpumps
should
be analysed
before
installation,
especially
if the
pump
has
few cylinders
or
if these cylinders
are of single
acting type.
Because of
the risk of rupturing
the
pipework
of any scheme
driven
by
positive
displacement
machines it is usual
to
fit air
vessels on both
sides of such
machines.
The sizing
of such
air
vessels has been
carried
out
in the
past
using
approximate
methods
and
experience. On
the
whole
they
work well, but now
their analysis
can
be undertaken
using
the
theoretical
approaches
given
in this
book
(see pp.
1l+120);
it
is
suggested
that
the
pump, its associated
air
vessels
and
the
pipe
network
should
be analysed
and
its
safety
properly
established.
4.3.3 Rotodynamicpumps
Most
pumps
in
use today
are
of the rotodynamic
type. The
word rotodynamic
means
that the
pump
generates the
flow through
it and the
head across
it
by the
dynamic
effects
that
it applies
to
the
liquid being
pumped.
Such
pumps
fall
in to
four
categories:
(a)
Radial
flow
pumps.
(b)
Mixed
flow
pumps.
(c)
Axial
flow
pumps.
(d)
Turbo
pumps.
It is
not the
intention
to
give
a
detailed
description
of how
pumps
operate
and it
will be assumed
that
the
reader is conversant
with
the
basic theory
of
rotodynamic
machinery.
This basic
theory
is
taught on mechanical
engineering
courses
and
on
some civil
engineering
courses;
most textbooks
include
the
material.
The
author's
book An
introduction
to engineering
fluid
mechanics'
published by
Macmillan
includes all the
material
required
for this
section.
To describe the
relationship
between the
rotational speed
of
a
pump,
the
flow
through
it and
the
head
across
it, an equation
relating these
three
variables
is
required.
Such
an equation
can
be used
in conjunction
with
the
appropriate
characteristic
invariant
to
obtain
the
velocities and heads
upstream
and downstream
of the
pump.
Thus
a solution
will be obtained.
The
problem
remains
that
a
pump is
Sec.
4.31
Pumps
on
whether
the
variables
are
positive
or
negative'
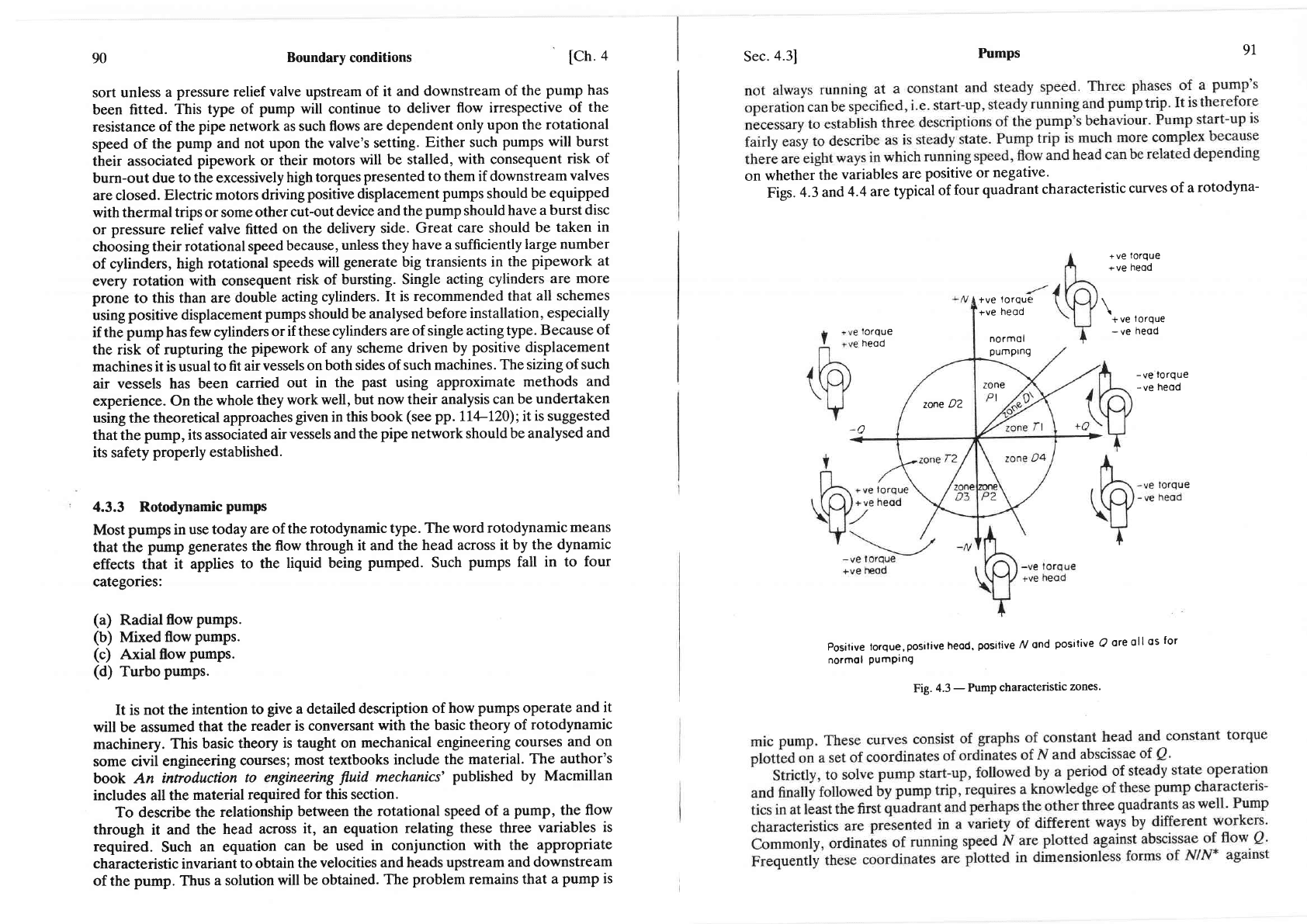
Figs.
4.3 and
4.4
are
typicil
of four
quadrant
characteristic
curves
of
a rotodyna-
lorque
heod
/)
zone
DZ
fve
lorqu(
rve
neoo
normol
pumplng
+
ve
torque
+ve heod
\
+ve
lorque
-
ve
heocl
-
ve
torque
-ve
heod
91
90
Positive lorgue,posrlive
heod.
positive /y' ond
posifive
Q
ore
oll
os
fOr
normol
PumPing
Fig.
4.3
-
Pump
characteristic
zones.
92
Boundary
conditions
lch.4
4
Fig.
4.4
-
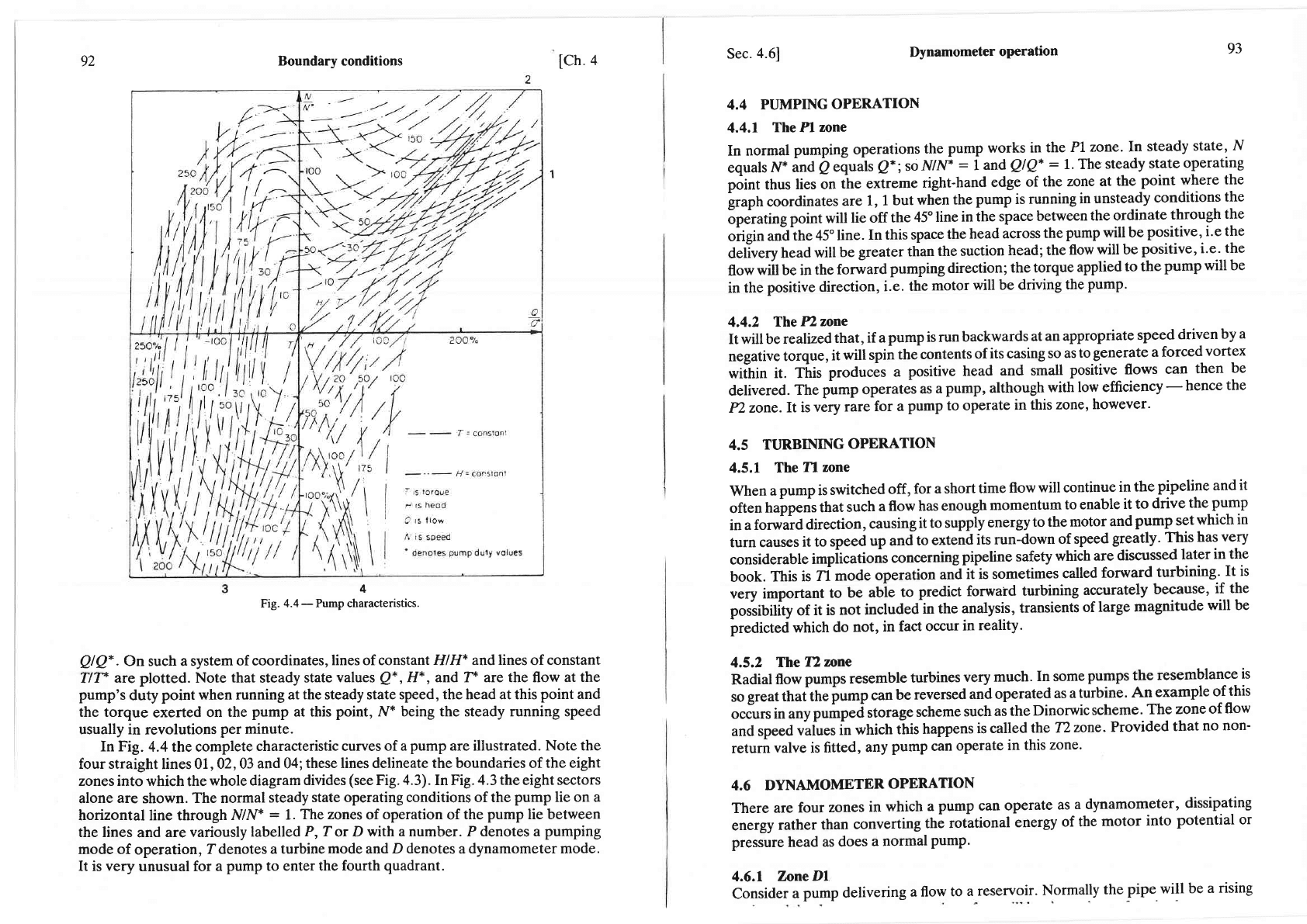
Pump characteristics.
QlQ"
.
On such a system
of coordinates,
lines of constant HIH* and
lines
of
constant
TIT*
are plotted. Note
that
steady
state
values
Q*,
H*, and ?o are the flow at
the
pump's
duty
point
when
running at
the
steady state
speed, the head at this
point
and
the torque
exerted
on
the
pump
at this
point,
N* being the steady running speed
usually in
revolutions
per
minute.
In Fig.
4.4 the complete
characteristic curves
of a
pump
are illustrated.
Note the
four straight
lines 01,02,03
and 04;these
lines delineate the boundaries of
the eight
zones into which
the
whole diagram
divides
(see
Fig.
4.3).
In Fig.
4.3 the
eight
sectors
alone
are
shown.
The normal
steady
state operating conditions of the
pump
lie on a
horizontal line through
N/N*
:
L.
The zones
of
operation
of
the
pump
lie between
the lines
and
are
variously
labelled
P, T
or D
with a number. P denotes a
pumping
mode of
operation,
Idenotes
a
turbine
mode
and
D denotes
a
dynamometer mode.
It is
very
unusual for
a
pump
to enter the
fourth
quadrant.
Sec.4.6l
Dynamometer
operation
4.4
PUMPING
OPERATION
4.4.1
The Pl
zone
In normal
pumping
operations
the
pump
w9r\s
in
the
P1-. zone.In
steady
state,
N
equals
N* ind
p
equats
O*;
so
N/N*
:
1
and
QIQ*
:
1. The
steady
state
operating
point
thus
lies on
ttt" extreme
right-hand
edge
of the
zone
at
the
point where
the
graph
coordinates
are
1,
I but
when
the
pump is
running
in
unsteady
conditions
the
6perating
point will
lie
off
the
45'line
in the
space
between
the ordinate
through
the
origin
unl
tfr" 45'line.
In this
space
the
head
across
the
pump will be
positive,
i.e the
deilvery
head
will
be
greater than
the suction
head; the
flow
will be
positive,
i.e.
the
flow
wiil
be
in
the
forward
pumping
direction;
the torque
applied
to the
pump
will be
in the
positive direction,
i.e.
the
motor
will be driving
the
pump.
4.4.2
The
EL znlne
It
will be
realized
that,
if a
pump
is run
backwards
at
an appropriate
speed
driven
by
a
negative
torque,
it
wilt spin
the
contents
of
its casing
so
as to
generate a forced
vortex
wit-trin
it. ftris
produces
a
positive
head
and small
positive flows
can
then
be
delivered.
fire
pump
operates
as
a
pump, although
with
low efficiency-hence
the
Y2zone.It
is
very rare
for a
pump to operate
in
this
zone'
however-
4.5
TT,JRBINING
OPERATION
4.5.1
The
Tl zone
When
a
pump is
switched
off,
for
a short
time
flow
will continue
in
the
pipeline
and
it
often
trappens
that
such
a
flow
has enough
momentum
to enable
it to
drive
the
pump
in a
forward
direction,
causing
it
to supply
energy
to the
motor
and
pump
set
which
in
turn causes
it
to speed
up and
to
extend
its
run-down
of speed
greatly.
This
has
very
considerable
impiications
concerning
pipeline safety
which
are
discussed
later
in the
book.
This
is
?"1
mode
operation
and
itis sometimes
called
forward
turbining-
It is
very important
to
be
abie
to
predict forwaid
turbining
accurately
because,
if the
posiUitity of
it is
not
includedin
the
analysis,
transients
of
large
magnitude
will be
predicted which
do
not,
in fact
occur
in
reality.
4.5.2
The
?ll zone
Radial
flow
pumps resemble
turbines
very
much.
In
some
pumps
the
resemblance
is
so
great that the
putttp
can
be
reversed
and operated
as
a turbine.
An
example
of
this
o.Jurr
in any
pu*p"d
storage
scheme
such
as
the
Dinonric
scheme.
The
zone of
flow
and speed
nltu.s
in
which
this
happens
is
called
the
TLzone.
Provided
that
no
non-
return
valve
is
fitted,
any
pump can
operate
in
this
zone.
4.6 DYNAMOMETEROPERATION
There
are
four
zones
in
which
a
pump
can
operate
as
a dynamometer,
dissipating
energy
rather
than
converting
the
rotational
energy
of the
motor
into
potential
or
pressure
head
as does
a
normal
pump.
4.6.1
Zone
Dl
Normally
the
piPe
will
be
a
rising
93
Consider
a
pump delivering
a flow
to
a
reservoir.
94
Boundary conditions
lch.
4
reservoir.
The
pump will be operating
as
a
pump and
will
be in zone
Pl
(the first
pump
zone).
If, for
some
reason,
the level in
the
downstream
reservoir is
lowered,
the
pump
flow
will
become
larger and larger
as
the
head
against
which the
pump
is
working diminishes.
Eventually
the head
will become
negative
and this
will happen
as
the
downstream
reservoir
level
falls
below
that
in the
upstream reservoir.
The
energy
that
the
pump
is
then
supplying
to
the
water
is still
given
by wQHbut
now fl
is
negative.
In
effect
the
pump is
generating
a negative
quantity
of energy,
i.e.
it
is
destroying
energy
even though
the
motor
is still
running
and driving
the
pump at its
steady
running
speed.
The
pump is thus
acting
as
a dynamometer.
This
corresponds
to the first
dynamometer
mode:
Dl.
For
another example
consider
the case
of
two
booster
pumps
in series on
a
pipeline.
The
upstream
pump
may be
forcing
water
through
the downstream
pump so
that
it starts
to
generate a negative
head
and so
starts to
act
as a dynamometer.
Again,
this
is an example
of
Dl, zone
dynamometer
mode
operation.
4.6.2 The
D2
zone
If
a
pump, running
at a
positive speed,
experiences
a delivery
head
which
is
larger
than its delivery
no-flow
head,
and it does
not
have a non-return
valve fitted,
flow
will
be
forced
backwards
through
the
purnp.
The
torque
will be
positive,
the
head
will be
positive, but the
flow
will be
negative.
The head
in the
delivery
pipe will be
large
but
the head
in
the suction
pipe will be
very much
smaller.
The
pump
therefore
must
be
destroying
energy
and so
must
be acting
as a dynamometer.
This
is the
D2
zone.
4.6.3
The
D3 zone
In
the
third
quadrant,
another
dynamometer
zone exists.
In this
quadrant the
pump
is
running
backwards
and
the
flow is
reversed.
The head
in the delivery
pipe
is
higher
pump
then
exhibits.
4.6.4
The
D4 zone
The D4
zone is
in the
fourth
quadrant.
It is most
unlikely
that a
pump will ever enter
this zone
as
it is
most
unusual
for
any
pump
to enter
the
fourth
quadrant.
In the
fourth
quadrant,
the
direction
of the
impeller's
rotational
motion
is in
the reverse
direction
as are the
torque
and
head.
The flow
is
in
the
positive
direction.
The fourth
quadrant
is made
up
of the
F2 zone
and
the D4 zone.
As stated
before,
the
impeller
can
act as
a
pump
even
when rotated
in the reverse
direction
but, if
flows
become
relatively
large, the
head that
the
pump
can
generate
decreases
due to friction
losses
and
eventually
bemmes negative. Once
this happens,
Sec.
4.71
The
Suter
presentation
representation
of such
a complete
set
of
pump characteristics
which
is ideally
suited
to a
computer
solution
using
the
method
of
characteristics.
The
following
presen-
tation
is taken
from
Suter's
original
papar.
4.7
THE SUTER
PRESENTATION
There
are
many
ways
of
presenting
the
curves
of
a
pump
operating
in
four
quadrant
modes.
If
dimensional
analysis
of
rotodynamic
machines
is
performed,
the following
result
can
be
obtained:
95
*(*,,,#
PND,
p)
k
D
u)
:o
The
first
group really
represents
the
ratio
u{u,thesecond
represents
the
ratio
ulu,the
third is
the
Reynold;s
nimber,
the
fourth
is
the
roughness
number
and
the
fifth
is
the
efficiency.
urii
the
denotes
velocity
of
flow,
u is
the absolute
velocity,
rz is is
the
speed
of the
blade
tip
and
E is
the
pump's
efficiency.
In
a
pump, Reynolds'
numberis
large
and
variations
in its
value
have
little effect
on the
nature
of
the
flow
through
the
impeller.
klD
is
usually
very small
as
the
inner
surfaces
of
pumps are
finished
io high
standards
and often
with
a
high
polish; so
the
precise
value of'klD
is
not
importani.
Then
the
function
can
be
reduced
to
a function
ielating
three
variables
only:
Q\ND3,
gHlN2D2
and
E. The
function
is really
a
statement
that
the efficiency
depends
on
the
geometry
of
the exit
velocity
triangle
of
the
pump. In
effect
this
means
that
the
behaviour
of
the
pump depends
on only
two
parametl
rs-
elND3
and
the
blade
angle
-
as this
is sufficient
to
define
the
velocity
iriangle
for
any
given
pump.
Actually,
QIND3
is
merely
another
way of
writing
elribuwhichis-u7a
as
statid
previously;
b
is
the
breadth
of
the
impeller
at
exit;
D
urrd ,
are
as definiO
previously.
In
an
individual
pump, the
ratio
reduces
to
QIN
because
D is
a
consiant
for
any
given
pump. Similarly
a torque
group can
be
formulated.
The
power of
the
pumP is
wQnn;
so,
multiplying
the
three
groups
and
p/p
togetner
([tNOz)(BHNzDIE(plp)
grves PlpN3DsE
which
is the
shape
numbei.
Dividing
P byd,
the
angular
neiociiy,
gives the
torque
so
TtpNzDs
gives
a
torque
group:
TlNz
asiuming
that
the
mass
density
p
and
the
diametet
D
is constant-
Q
can
U!
tatln
either
as
p/N-or
as
QlrDbu,
\,
can
be taken
as HlN2
or
asLgHluz
and
1.
can
be
taken
asTlNz
or
as
4TlrpDzba2.
Suter
suggests
that,
to
avoid
infinities
and
a
presentation
that
would
contain
multiple
values
for one
value
of
the
independent
variable,
two
dependent
variables
W,
and
W,
be
introduced.
The
dependent
variable
4
specifies
the
value
of
ry
(the
head
group)
in terms
of
.th-e-
$
(the flow
group)
anOttri
variable
I7,
does
the
same
for
l.
(the
torque
grgup)t
Note
that
the
Lrp"ir.tipt
asterisk
(*)
denotes
that
the
variable
to
which
it is
applied
is a steady
state
operating
point
value.
Then
wn:sign(rr)
lffi