Fishwick P.A. (editor) Handbook of Dynamic System Modeling
Подождите немного. Документ загружается.

14-2 Handbook of Dynamic System Modeling
process of the model. The XML-based RUBE framework defines a formal approach to capture physical
knowledge as well as the semantic information of the model and represent the information as separate
XML documents.
We developed two XML-based languages: the multimodeling exchange language (MXL) (Kim et al.,
2002; Kim and Fishwick, 2002a, 2002b; Fishwick et al., 2003; Fishwick, 2002; Damkjer, 2003) and the
dynamic exchange language (DXL) (Lee, 2005; Lee and Fishwick, 2002), for the RUBE framework. MXL
is an XML-based modeling language to support traditional heterogeneous model types such as FSM,
FBM, and Petri net (Fishwick, 1995). DXL is an XML-based functional block language to support low-
level simulation execution within the RUBE framework. We first discuss two multimodeling concepts,
integrative multimodeling and general multimodeling as well as the overall structure of the XML-based
RUBE framework. In Section 14.2, the process for constructing a multimodel is presented. The concepts
and descriptions of MXL and DXL are explained in Sections 14.3 and 14.4. In Section 14.5, we demonstrate
how the methodology is applied to a real-world application using an example.
14.1.1 Integrative Multimodeling
A real-world system can be embodied as a certain model type within a 2D or 3D visualization environment.
It can be described by different perspectives depending on the modelers’ viewpoint since the real-world
system has the geometry or dynamics. Therefore, through the modeling process, the real world could be
expressed in diverse model types, such as a geometry model or a dynamic model. Ideally, we can explore
and execute these models within a unified 3D scene that integrates such models.
We present a novel method (i.e., integrative multimodeling) of visually merging two types of models
with the intention of allowing the user to more easily, and contextually, associate dynamic model and scene
model components. We need to define a formalized scene domain in which multiple model representations
can exist together and a certain model type can be transformed into other model types via user interactions,
by conceptualizing all objects, that the scene domain contains, and specifying properties (i.e., geometry and
dynamics) of objects and relationships between objects. We employ the concept of ontology to formalize
a certain scene domain. The purpose of integrative multimodeling is to provide a human–computer
interaction environment that allows users to change model types within the same environment. Therefore,
user interactions should be logically formalized and implemented to supportthe integrative multimodeling
environment. We formalize the user interaction as an interaction model and derive the interaction model
(Park and Fishwick, 2004a, 2004b; Park, 2005) based on first-order logic (FOL) rules. The concepts of
ontology and the FOL rules along with the interaction model will be further discussed in Section 14.2.
14.1.2 General Multimodeling
In this section, we discuss a multimodel concept and two types of multimodels according to their model
types, such as homogeneous and heterogeneous multimodels.
14.1.2.1 Intralevel and Interlevel Couplings
General multimodels are simulation models that are composed of heterogeneous simulation models. Since
most simulation models like FSM and FBM represent only a part of the overall system behavior, they make
only a subset of a solution for analyzing the prediction and diagnosis of the real world. General multimodels
could, however, have a number of abstraction perspectives for a complex real-world system. Therefore,
they can more correctly represent and analyze a complex real-world system. Different component models
in a multimodel can define the activity at different stages of the simulation.
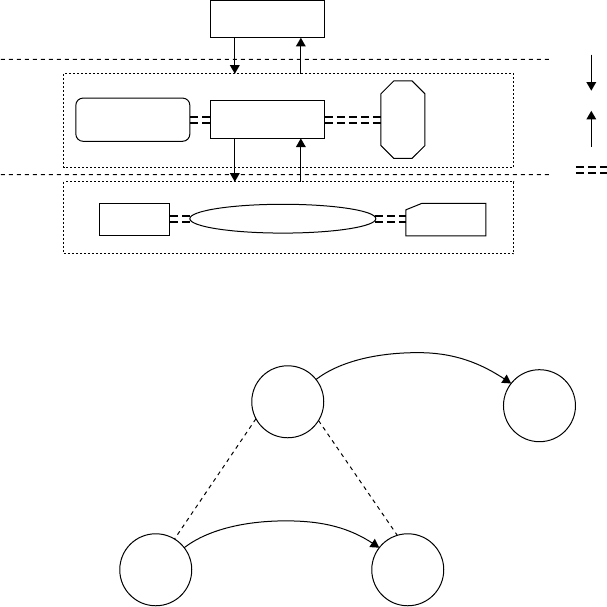
Figure 14.1 shows a general multimodel example having an abstraction hierarchy of heterogeneous
simulation models. Double dotted lines in this figure mean the relation of its components to compose
an upper-level model. This relation should ensure intralevel coupling. Intralevel coupling defines model
components coupled to one another in the same model (Cubert and Fishwick, 1998). In Figure 14.1, there
are two intralevel couplings. M
2
is composed of m
1
, m
2
, and m
3
. M
3
is composed of s
1
, s
2
, and s
3
.The
intralevel coupling in M
2
defines how the submodels of M
2
are formed to represent a model M
2
and the
intralevel coupling in M
3
defines how the submodels of M
3
are formed to represent a model M
3
.
Multimodeling 14-3
M
1
m
1
m
2
m
3
s
1
s
2
s
3
Level 1
Level 2
Level 3
M
2
M
3
Refinement
Abstraction
Connection
FIGURE 14.1 General multimodel structure.
s
1
s
2
s
11
s
12
p
1
(i)
p
2
(i)
FIGURE 14.2 Homogeneous refinement: declarative →declarative.
In Figure 14.1, down-arrows mean refining a model and up-arrows mean the abstraction of a model.
These two relations should ensure interlevel coupling. Interlevel coupling defines rules as to how model
components from one model can be refined into models of different types (Cubert and Fishwick, 1998).
In Figure 14.1, there are two interlevel couplings. M
2
refines a model M
1
and M
3
refines m
2
. A model m
2
abstracts M
3
, and M
1
abstracts M
2
. To refine m
2
into M
3
, we should ensure the intralevel coupling in M
2
when we change the submodel m
2
and M
3
.
14.1.2.2 Homogeneous and Heterogeneous Multimodels
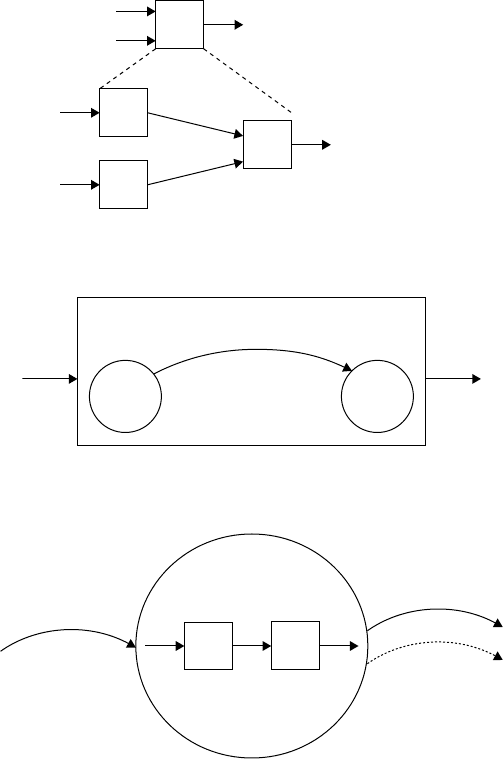
In Figure 14.2, the FSM shows top-down homogeneous decompositions (i.e., intralevel coupling), since
the element of the upper model is defined by the same type of models. State s
1
is decomposed into the
lower level of FSM. The predicates p
1
(i) and p
2
(i) involves external input variable i.
Figure 14.3 shows a two-level functional hierarchy, where function f is defined in terms of a composition
of three other functions f
1
, f
2
, and f
3
.
Heterogeneous decomposition of models in intralevel coupling describes the semantics of a model using
different model’s semantics. Figure 14.4 shows FSM that contains the internal state transitions associated
with function f . The predicate p(i) tests input variable i. Any FSM should be defined inside a functional
block (i.e., function f in Figure 14.4) to represent explicit external input and output semantics.
Figure 14.5 shows a state-to-state space mapping, which is not immediately apparent from the figure.
Specifically, most functional block models that represent some aspects of physical reality involve state
transitions, which means f
1
and f
2
contain internal state transitions. There is a transition with two possible
types of semantics coming out of state s in Figure 14.5. An external transition would be of the form p
2
(i) and
an internal transition would be based on a variable o that is a component of internal state space of f
1
and f
2
.
14-4 Handbook of Dynamic System Modeling
f
f
3
f
1
f
2
i
1
i
2
i
1
i
2
o
o
O 5 f (i
1
, i
2
)
O 5 f
3
(f
1
(i
1
), f
2
(i
2
))
FIGURE 14.3 Homogeneous refinement: functional →functional.
io
f
s
1
s
2
p(i)
FIGURE 14.4 Heterogeneous refinement: functional →declarative.
p
2
(i)
p
1
(i)
p
2
(o)
s
f
1
f
2
io
FIGURE 14.5 Heterogeneous refinement: declarative →functional.
14.1.3 RUBE Framework
The RUBE framework is an XML-based dynamic modeling and simulation framework permitting the
users to specify and execute a dynamic model, with an ability to customize a model presentation using 2D
or 3D visualization (Park and Fishwick, 2004a, 2004b; Park, 2005; Fishwick et al., 2003; Kim and Fishwick,
2002b). The purpose of RUBE is to facilitate a dynamic multimodel construction based on XML, and
visualize and execute the model within a 2D environment (Fishwick et al., 2003) or a 3D immersive
environment (Park and Fishwick, 2004a, 2004b; Park, 2005; Fishwick et al., 2003; Carey and Bell, 1997).
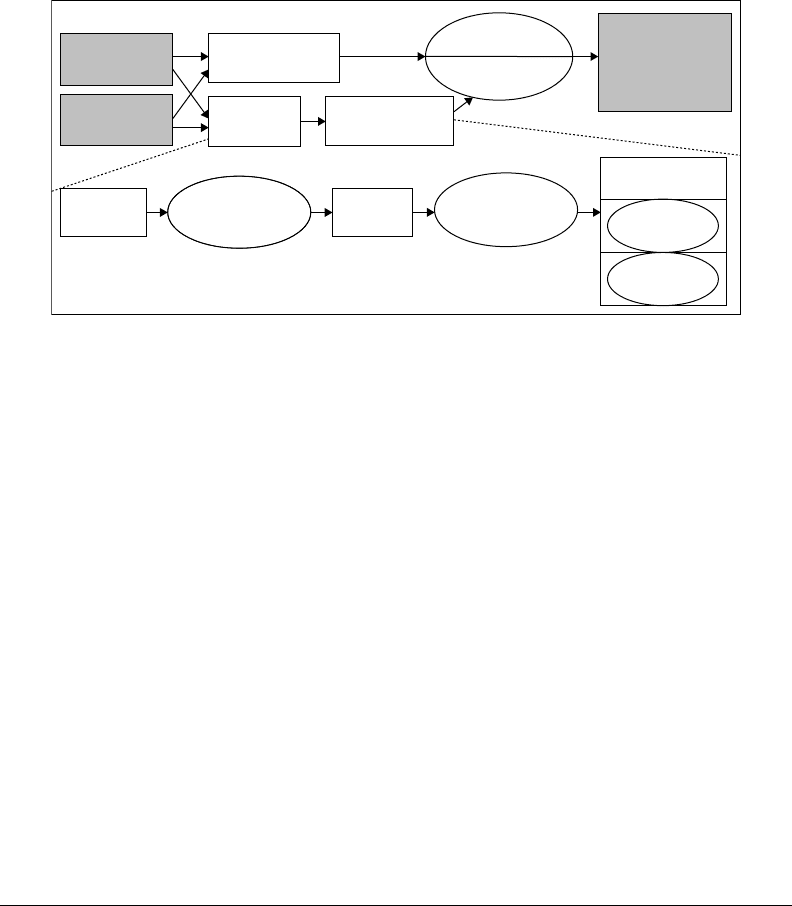
The overall process of the XML-based RUBE framework is shown in Figure 14.6.
We will proceed using the architecture depicted in Figure 14.6, referencing each section by number as it
appears in the figure. For each section, we will cover a description of that section.
A scene file contains 2D or 3D geometry objects that represent geometry and dynamic models. The RUBE
framework has 2D- (i.e., Sodipodi, 2006) and 3D-based (i.e., Blender, 2006; Roosendaal and Selleri, 2004;
Roosendaal and Wartmann, 2002) interfaces for representing 2D and 3D scenes, respectively. The scene
files represent the appearance of geometric objects in the model and do not have any information about
model behavior or dynamics. The scene could be represented either in standard 2D/3D XML documents
Multimodeling 14-5
Simulation code
…
SimPackJ/S
…
Simulation file
MXL file
Section 3
MXL-to-DXL
translator using
XSLT
DXL-to-Javascript
translator using
DOM
DXL file
Section 4
MXL file
Simulation file
Scene file
Section 2
2D & 3D
RUBE dynamic
modeling file
2D Interface
(Sodipodi)
3D Interface
(Blender)
2D & 3D
merge engine
Blender
game engine
FIGURE 14.6 The RUBE framework.
(i.e., scalar vector graphics (SVG) (Eisenberg, 2002) or extensible 3D (X3D, 2006) or in Blender. Therefore,
any 2D or 3D tools, which can generate SVG or X3D files, might be applied as a part of the RUBE
framework.
For model creation there are two stages: model translation and model simulation. For model translation,
a dynamic model is an actual model file that is represented in MXL. The MXL file describes the behavior
of the model and represents the model file that includes the specification of a heterogeneous multimodel
in an abstract level such as FBM and FSM. The MXL-to-DXL translator in extensible stylesheet language
(XSL) (Kay, 2000) translates a model file written in MXL into a low-level functional specification language
called DXL, which can be described with a homogeneous block diagrammatic presentation. For model
simulation, the DXL is translated into an executable programming code for the model simulation using the
DXL-to-simulation translator. The programming code either in JavaScript or in Python can be executed
based on SimpackJ/S or Simpack Python (Fishwick, 1992; Park and Fishwick, 2002), which provides the
underlying code foundation for libraries, classes, and objects for simulation.
For model merging we have two approaches: (1) using a 2D or 3D merge engine in XSL, we can merge
a scene file with an actual model execution file in JavaScript or (2) within the Blender environment, we
could naturally combine the 3D scene in Blender with simulation code in Python using Blender game
engine. Then, finally we could visualize and execute the geometry and dynamic models within a 2D or 3D
environment.
14.2 Scene Construction
14.2.1 Ontology
We need to formalize physical systems based on particular domain knowledge, since such formalism should
help to build multiple, cooperative simulation models of certain physical systems. We can describe a certain
target system using the concept of ontology. An ontology represents a formal conceptualization of a domain
by clearly specifying meaning of terms and their interrelationships among concepts used in a particular
domain (McGuinness, 2002; McGuinness and Harmelen, 2003; Berners-Lee et al., 2001). Ontologies
consist of three general elements: classes, properties, and the relationships between classes. Any concepts in
a target domain are represented as classes. Classes could be further generalized into specific categories using
“is-a-kind-of”relationship (i.e., generalization in unified modeling language (UML). Also,we can express a
structural relationship (i.e., association in UML) that specifies mappings between objects (i.e., instances of
classes). Using “has-a”/“whole-part” relationship (i.e., aggregation in UML), structural dependency could
be described. In addition, certain constraints, such as multiplicity and multiple associations, are specified
14-6 Handbook of Dynamic System Modeling
along with the relationships between objects. We explain the conceptualization process by creating an
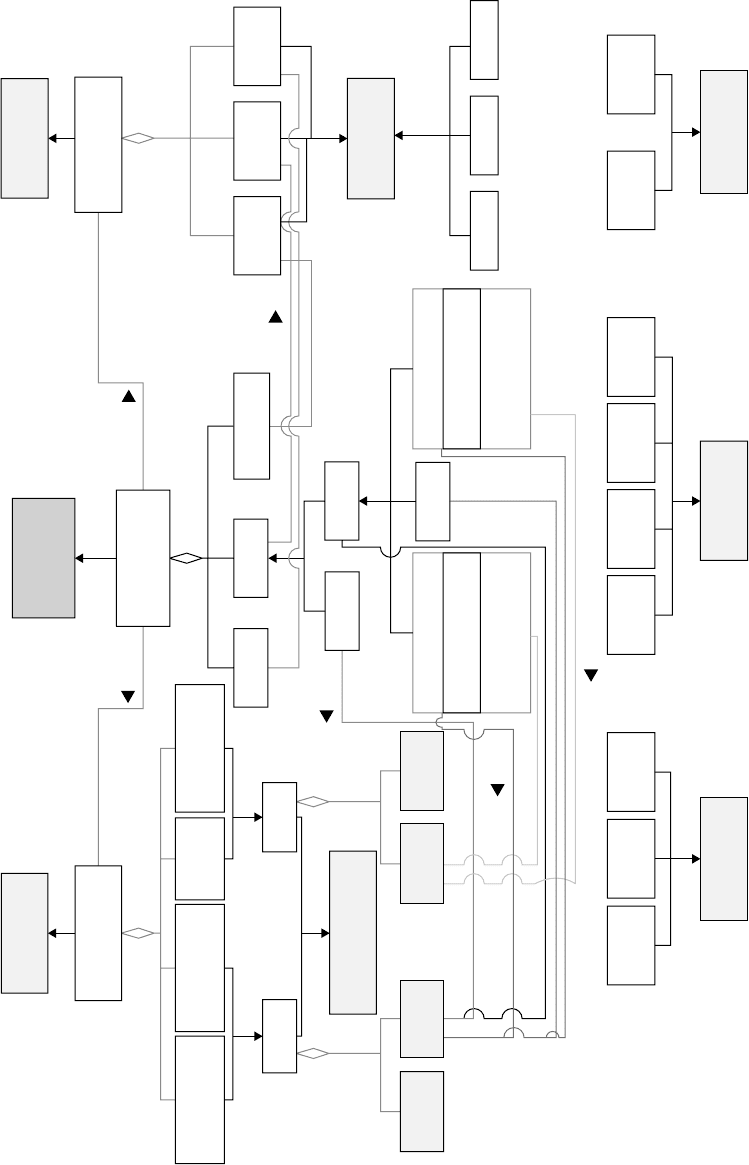
ontology for a sample domain: a boiling water domain. Figure 14.7 shows an example scene ontology for
boiling water (some concepts and relationships are not shown to avoid ontology complexity).
14.2.1.1 Classes and Relationships
Consider a pot of boiling water on a stovetop electric heating element. This domain contains a pot and
an electric stove with a temperature knob. Initially, the pot is filled to some predetermined level with
water. And this system has one input or control—the temperature knob. The knob is considered to be in
one of the two states: on or off. On the basis of the given domain knowledge, we could create four basic
classes, Pot, Electric Stove, Knob, and Water, as well as one abstract class called Scene. Because the overall
scene (i.e., boiling water scene) “is-a-kind-of” scene, we could add one more abstract class called Boiling
Water Scene as a subclass of the Scene class. And the electric stove “has a” knob. Therefore, aggregation
relationship could be created between the Electric Stove and Knob classes. In addition, we could make
aggregation relationships between the Boiling Water Scene class and Pot, Electric Stove, and Water classes,
since the scene contains the three classes. If we consider system dynamics approach (Fishwick, 1995),
which is a methodology for engineering simulation models, to examine the scene domain, we could derive
the following simple causal diagrams:
•
Knob_On Water_Not_Cold
•
Knob_Off Water_Cold.
The graphs show that “turning on/off the stove causes a change of water phase from cold/not cold to not
cold/cold.” (We assume that initially the water is in the cold phase.) Also, we could further generalize the
second nodes in the graphs. Hence, we could drive the following generalized causal graphs:
•
Knob_On Water_Heating (=Water_Getting_Hotter) Water_Boiling
•
Knob_Off Water_Cooling (=Water_Getting_Colder) Water_Cold.
By analyzing the causal graphs above, we could create a dependency relationship between Knob and Water
classes. Also, the Water class could be further generalized into “cold” water and “not cold” water based
on current water phase. Therefore, corresponding classes, such as Cold and Not cold, could be created as
subclasses of the Water class. Besides, more generalized water phases (i.e., heating, cooling, and boiling
phases) could be adopted as subclasses of the Not cold class. However, the following issue naturally arises:
How do we express the sudden change in temperature within the heating and cooling phases? In other
words, how do we naturally describe the continuous behaviors inside the phases? Therefore, we need
to define reasonable functions that could describe more specific dynamic behaviors inside the phases.
We could employ differential equations, since differential equations are the natural method of defining
physical phenomena. Consider, for example, the heating phase. We could derive the following differential
equation using Newton’s law and the capacitance law:
T
=k(100 – T)
where T is the temperature (α ≤T ≤100, α is the ambient temperature) and k the thermal conductivity
of water (i.e., rate constant).
In this case, one integrator, one multiplication, one subtraction, and one constant-number generation
functions are needed. Therefore, corresponding functions are inserted into the Heating class as methods.
Likewise, proper functions for cooling phase could be inserted into the Cooling class.
We define Dynamic Model and Geometry Model classes, since we want a formalized scene domain in
which multiple model representations can exist together (i.e., integrative multimodeling) and a certain
model type can be transformed into another model type via user interactions (i.e., geometry model to
dynamic model and vice versa). In addition, Boiling Water Dynamic Model class is defined as a subclass
of the Dynamic Model class. Similarly, Boiling Water Geometry Model class is defined as a subclass of the
Geometry Model class. The Boiling Water Dynamic Model class could be composed of at least one dynamic
model, such as FSM or FBM. Therefore, we define FSM and FBM classes as subclasses of the Simulation
Multimodeling 14-7
Dynamic model
{abstract}
Simulation model
{abstract}
Transition
{abstract}
Sensor
{abstract}
Controller
{abstract}
State
{abstract}
Function
{abstract}
Trace
{abstract}
Mouse
sensor
Keyboard
sensor
Message
sensor
AND
controller
OR
controller
Python
controller
Expression
controller
Boiling water DM
The first-level
boiling water DM
The second-level
boiling water DM
The third-level
boiling water DM
FBM
FSM
Interaction
model
Actuator
{abstract}
Morphing
actuator
Message
actuator
Scene
{abstract}
Boiling water
scene
Boiling water GM
Handler
geometry
Water
geometry
Pot
geometry
has
has
has
Geometry model
{abstract}
3D geometry
{abstract}
Cube
Heating
has
has
Not cold
Cold
Water
Pot
Global handler
has
Cooling
Boiling
attribute: Has_function
Instances of class Function
functions: Integrator,
Multiplier, Subtractor,
Constant generators.
attribute: Has_function
Instances of Class Function
functions: Integrator,
Multiplier, Subtractor,
constant generators.
Sphere Arrow
FIGURE 14.7
An Example scene ontology for the boiling water.
14-8 Handbook of Dynamic System Modeling
Model class. Because each simulation model has its model elements (i.e., transitions and states for FSM;
traces and functions for FBM), we also define four classes such as Transition, State, Trace, and Function.
Likewise, Geometry class is created, since 2D/3D objects are needed for explicitly representing geometric
representations for a geometry model as well as a dynamic model in 2D or 3D space. Specific geometric
types, such as primitive objects (i.e., cube, sphere, and arrow) and nonprimitive objects (i.e., stove, water,
and pot), could be defined as subclasses of the Geometry class. By conceptualizing the simulation model
type and 2D/3D geometry domains, we would provide syntactic and semantic mappings between objects
in the boiling water domain and objects in the simulation model type domain, and objects in the boiling
water domain and objects in the 2D/3D geometry domain.
To support the integrative multimodeling environment, we need to define additional classes, such
as Interaction Model, Scene Handler (i.e., 3D icons for supporting integrative multimodeling), Sensor,
Controller, and Actuator. We will cover these concepts in the following subsections.
14.2.1.2 Properties and Relationships
We assign two named properties (i.e., attributes), Geometry Model and Dynamic Model, to the Boiling Water
Scene class. In addition, we generate two association relationships, named“has a geometry model,” and“has
a dynamic model,” which connect to the Boiling Water Geometry Model and Boiling Water Dynamic Model
classes. Therefore, an object (i.e., an instance) of class Boiling Water Scene could have two attributes whose
values are objects of Boiling Water Geometry Model and Boiling Water Dynamic Model classes. Similarly,
two attributes, Geometry Object and Dynamic Model Element, are declared for the five fundamental classes
of the scene (i.e., Pot, Electric Stove, Knob, Water, and Scene Handler classes), since we assume that every
object in the scene has a corresponding geometric object for presentation as well as a dynamic model
element (i.e., state or function) for dynamics. Because Cold, Not Cold, Boiling, Cooling, and Heating
classes are subclasses of the Water class, these generalized classes can have their own attribute values that
are generated from Geometry, State, and Function classes. Therefore, we create association relationships,
named “has a geometry object,” and “has a dynamic model element,” between the water domain and the
geometry domain, and the water domain and the function/state domain. Because all classes in the water
domain are generated based on the water phases, state-based dynamic model type (i.e., FSM) could be the
reasonable choice to represent dynamics. Therefore, association relationships between the water domain
and the state domain are generated.
We create another association relationship named “uses” between class State/Function and class Geom-
etry, since 2D/3D objects are needed for explicitly representing geometric representations for a certain
dynamic model in 2D/3D space. An attribute, Interaction Model, is defined inside Geometry class, since
we attempt to induce an overall scene interaction model by taking an individual interaction model for
each geometric object that the boiling water scene contains. In addition, we define three attributes, Sensor,
Controller, and Actuator, in class Interaction Model so that an interaction model for a certain object could
be inferred from its attribute values (i.e., sensor, controller, and actuator, which are components of an
interaction model) through first-order logics. Likewise, the overall interaction model for the boiling water
scene could be generated from each object’s interaction model through first-order logics. We will explain
the process for creating interaction models for the boiling water scene in next section. To represent relation-
ships above,we create four association relationships,“has a sensor,”“has a controller,”“has an actuator,” and
“has an interaction model,” between Interaction Model and Sensor classes, Interaction Model and Controller
classes, Interaction Model and Actuator classes, and Geometry and Interaction Model classes, respectively.
14.2.2 Interaction Model Creation
The purpose of integrative multimodeling is to provide a human–computer interaction environment that
allows users to change model types within the same environment. Therefore, user interactions should be
logically formalized and implemented to support the integrative multimodeling environment. We formal-
ize the user interaction as an interaction model and create the interaction model(s) through first-order
logic rules. The interaction model consists of a sensor, a controller, and an actuator as model components
as well as links between components, since we will utilize Blender game logic bricks (Roosendaal and
Multimodeling 14-9
Wartmann, 2002), which have three logic components, sensors, controllers, and actuators, to execute the
interaction model.
First, we induce all interaction models for the main model components through logic rules. Then an
overall interaction model for a certain scene domain is generated from individual interaction models along
with logic rules. The following are general first-order logic rules for creating interaction models used for
an individual object and an overall scene domain.
•
For an individual object
1. There exists an object
∃x Object(x)
2. There exists a sensor
∃x Sensor(x)
3. There exists a controller
∃x Controller(x)
4. There exists an actuator
∃x Actuator(x)
5. Every Object has an interaction model
∀x (Object(x)
∃ y (InteractionModel(y) ∧ hasInteractionModel(x,y)))
6. Every Interaction Model has a sensor
∀x (InteractionModel(x)
∃ y (Sensor(y) ∧ hasSensor(x,y)))
7. Every Interaction Model has a controller
∀x (InteractionModel(x)
∃ y (Controller(y) ∧ hasController(x,y)))
8. Every Interaction Model has an actuator
∀x (InteractionModel(x)
∃ y (Actuator(y) ∧ hasActuator(x,y)))
9. If Interaction Model has a sensor and a controller, it has a link that connects the sensor with the
controller
∃ x, y1, y2 (InteractionModel(x) ∧ Sensor(y1) ∧ Controller(y2) ∧ hasSensor(x,y1) ∧ hasCon-
troller(x, y2)
Link(y1, y2) ∧ hasLink(x, Link(y1,y2)))
10. If Interaction Model has a controller and an actuator, it has a link that connects the controller
with the actuator
∃ x, y1, y2 (InteractionModel(x) ∧ Controller(y1) ∧ Actuator(y2) ∧ hasController(x, y1) ∧
hasActuator(x,y2)
Link(y1, y2) ∧ hasLink(x, Link(y1,y2)))
•
For an overall scene domain
11. There exists a scene
∃x Scene(x)
12. The scene has an Interaction Model
∃x, y ((Scene(x)
(InteractionModel(y) ∧ hasInteractionModel(x,y))))
13. The Interaction Model includes all individual interaction models
∃x (InteractionModel(x)
∀ y (InteractionModel(y) ∧ includes(x, y)))
14. If there exists a “hasHandler” relationship between two objects and the objects have their
interaction models, then the interaction model has a link that connects the actuator of the
parent object with the sensor of the child object
∃w, x1, x2, y1, y2, z1, z2 (Object(x1) ∧ Object(x2) ∧ hasParent(x2, x1) ∧ hasInteractionModel(x1,
y1) ∧ hasInteractionModel(x2, y2) ∧ hasActuator(y1, z1) ∧ hasSensor(y2, z2)
Link(z1, z2) ∧
hasLink(InteractionModel(w), Link(z1,z2)))
15. If two objects are conceptually mapped (i.e., geometry and dynamic model components for a
certain object), then the interaction model has a link that connects the actuator of the geometry
object with sensor of the dynamic object
∃ v, w, x1, x2, x3, y1, y2, z1, z2 (Object(w) ∧ hasDynamic(w, x1) ∧ hasGeometry(w, x2) ∧
uses(x1,x3) ∧ hasInteractionModel(x3, y1) ∧ hasInteractionModel(x2,y2) ∧ hasSensor(y1,z1) ∧
hasActuator(y2, z2)
Link(z2,z1) ∧ hasLink(InteractionModel(v), Link(z2,z1)))

14-10 Handbook of Dynamic System Modeling
Interaction models for water’s geometry and dynamic
Sensor Controller Actuator
Sensor Controller Actuator
Sensor Controller Actuator
Interaction model for Handler’s geometry
Fade (Geometry
dynamic)
Fade (Dynamic
geometry)
FIGURE 14.8 The overall interaction model for the boiling water scene.
16. If two objects are conceptually mapped (i.e., geometry and dynamic model components for a
certain object), then the interaction model has a link that connects the sensor of the geometry
object with actuator of the dynamic object
∃ v, w, x1, x2, x3, y1, y2, z1, z2 (Object(w) ∧ hasDynamic(w, x1) ∧ hasGeometry(w, x2) ∧
uses(x1,x3) ∧ hasInteractionModel(x3, y1) ∧ hasInteractionModel(x2,y2) ∧ hasSensor(y2,z2) ∧
hasActuator(y1, z1)
Link(z2,z1) ∧ hasLink(InteractionModel(v), Link(z2,z1))).
Based on these rules, we could induce an interaction model for the boiling water scene. First, we need
to define a user interaction scenario: (1) if an individual model object is touched, only the object is
transformed into other model type’s object (i.e., a geometry model object to a dynamic model object and
vice versa) and (2) if a handler (i.e., 3D icon) is touched, all model objects are transformed into other model
type’s objects (i.e., all geometry model objects to all dynamic model objects and vice versa). According to
the scenario, total three interaction models are needed: two for Water (i.e., geometry and dynamic objects)
and one for Handler (i.e., geometry object). Additional association relationships, such as “has a link” and
“has a hander,” are inserted in the scene domain so that we could represent a topological connectivity
between interaction model components and interaction models. Figure 14.8 shows the overall interaction
mode for the boiling water scene.
The Protégé Ontology Editor (2006) is employed to create an actual scene ontology as well as first-
order logic rules. Web ontology language (OWL) (Lacy, 2005) and semantic Web rule language (SWRL)
(Horrocks et al., 2004) are utilized to construct an ontology and logic rules. To verify an ontology for
a certain scene domain, we use RACER (2006) reasoner along with Protégé. Based on the ontological
structures for the boiling water scene, we define all the classes and subclasses for the scene domain
and modeling knowledge along with all necessary relationships based on Figure 14.7. An interaction
model for the boiling water scene could be induced from the scene ontology using first-order logic rules.
Therefore, using an inference engine such as Jess (2006), we could inference certain knowledge from
domain knowledge in OWL through inference processes. In Protégé, we use SWRL to describe first-order
logic rules, since SWRL tab is provided to allow users to create user-defined logic rules. There are a couple
of approaches for inference in Protégé:
1. Create first-order logic in SWRL and then perform inference using a Jess rule engine.
2. Write and store logical constraints using ProtégéAxiomLanguage (PAL) and then perform inference
using PAL query statements.
We use the first approach since SWRL includes a high-level abstract syntax for Horn-like rules. However,
the current version of Protégé does not provide inference capability for SWRL. Therefore, we manually
generate an interaction model for the boiling water scene based on logic rules at this time.
14.2.3 Blender Interface
We developed a Python-based interface, Blender Interface (Park and Fishwick, 2004a, 2004b; Park, 2005),
which can build 3D simulation models based on an ontology for a certain target domain. Blender Interface
consists of two components, Model Explorer and Simulation. Figure 14.9 depicts the overall environ-
ment in the Blender software. The environment consists of Blender 3D Window (Scene Editor), Blender
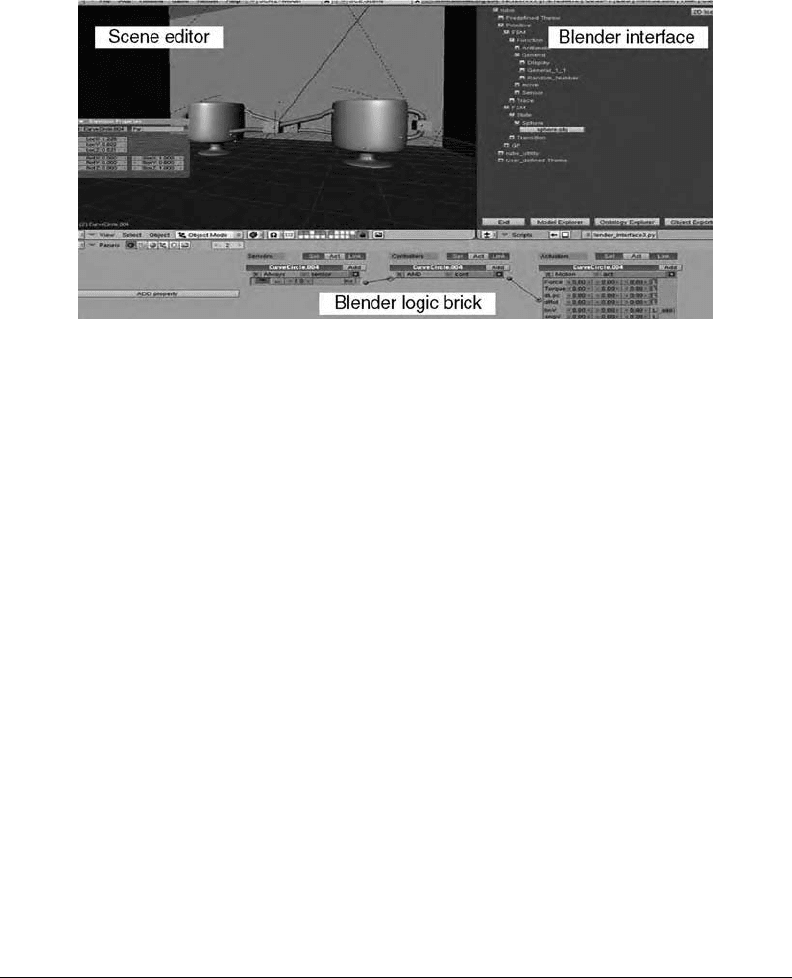
Multimodeling 14-11
FIGURE 14.9 Blender environment containing the game engine.
Interface, and Blender Logic Brick. Geometry and dynamic models for a certain system are composed
in the Scene Editor, while specifying the dynamic model types and styles for the system and generating
Python simulation code for the dynamic model in the Blender Interface. The Python code is inserted into
Blender Logic Brick to simulate the dynamic model. In addition, the interaction model, which could be
induced through inference processes,is implemented and executed in the Blender Logic Brick for providing
a human–computer interaction environment.
To use Blender Interface, RUBE must be installed. The RUBE has four folders: primitive, predefined theme,
user-defined theme, and rube_utility folders. The primitive and predefined theme folders are given for users
to provide libraries containing dynamic model objects and the corresponding MXL (we will explain it in
detail in the next section) files and functions in Python. As the names imply, the primitive folder has primi-
tive blender objects, such as cube and sphere, with the corresponding MXL file and function for each model
type, such as FSM or FBM. The predefined theme folder contains prefabricated, customized and personal-
ized blender objects, as well as MXL files and functions. If modelers want their own model representations,
they can create an object and store it into a proper model-type folder under the user-defined theme.
Using Model Explorer, modelers are able to search model objects, which they want to import, within the
RUBE folders. From the given dynamic model components in Blender 3D Editor using Simulation (we will
explain it in detail in Section 14.5), we can generate an MXL file for the target system automatically, since
we provide library systems that contain Blender objects as well as the corresponding MXLs and functions
in a set of pairs.
14.3 Multimodeling Exchange Language (MXL)
14.3.1 Concepts of MXL
MXL is an XML-based dynamic modeling language used to represent traditional simulation model types
within the RUBE framework. For MXL, the functional elements for each model type are clearly identified,
and entry points of the functional elements are defined as ports.
The functional elements are model components that behave as functions that naturally fit as part of
the model description. Figure 14.10 shows the multimodel structure of MXL. Multimodeling is permitted
wherever the appropriate model component could be “extended” or “expanded” to another model whose
outermost definition is a function. These couplings achieve multimodeling by inserting one function
inside of another (interlevel coupling) or by connecting one function to another (intralevel coupling).