Fabien B. Analytical System Dynamics: Modeling and Simulation
Подождите немного. Документ загружается.


18 1 A Unified System Representation
For mechanical systems in pure translation dampers rep-
resent ideal resistors. Linear dampers behave according to
the law
f = b(v
2
− v
1
) = bv,
where f is the force applied to the damper, b is the damping
coefficient, and v = v
2
− v
1
is the relative velocity of the
terminals of the damper.
b
v
1
2
v
Damper
• Mechanical Rotation:
For mechanical systems in pure translation, torsional
dampers represent ideal resistors. Linear torsional dampers
satisfy the equation
τ = b
ω
(ω
2
− ω
1
) = b
ω
ω,
where τ is the torque applied to the damper, b
ω
is the tor-
sional damping coefficient, and ω = ω
2
−ω
1
is the relative
angular velocity of the terminals of the damper.
2
b
ωω
ω
1
Torsional damper
• Electrical:
Electrical resistors represent ideal resistors. Linear electri-
cal resistors have a constitutive relationship
v = Ri,
where v is the voltage across the terminals of the resistor, R
is the resistance, and i is the current through the resistor.
R
_
+
i
Resistor
• Fluid:
The fluid resistors represent ideal resistors in fluid systems.
Linear fluid resistors satisfy the constitutive relationship
P = R
f
Q,
where P is the pressure across the terminals of the resistor,
R
f
is the fluid resistance, and Q is the volume flow rate
through the fluid resistor.
f
_
+
Q
R
Fluid resistor
Content and cocontent
The effort applied by the resistor is related to a scalar function called the
content which is defined as
1.2 System Components 19
D(f) =
Z
f
0
e
R
df = −
Z
f
0
e df =
Z
f
0
Φ
R
(f) df, (1.16)
where we have used the constitutive relationship e = −e
R
= −Φ
R
(f). Hence,
e = −dD(f)/df. Note that the content D(f) is also called the Rayleigh dis-
sipation function.
The cocontent is defined as
D
∗
(e
R
) =
Z
e
R
0
Φ
−1
R
(e
R
) de, (1.17)
where Φ
−1
R
(e
R
) = f is the inverse of the function Φ
R
(f) = e
R
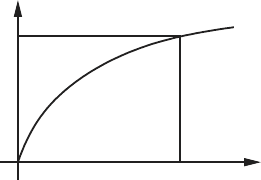
. An area
representation of the content and cocontent for a nonlinear resistor is shown
in Fig. 1.3. Thus, at any point (e
R
, f) along the curve Φ
R
(f) the following
condition must hold,
e
R
f = D(f) + D
∗
(e
R
). (1.18)
The content and the cocontent are both scalar functions, with D(f) indepen-
dent of the effort, e
R
, and D
∗
(e
R
) independent of the flow, f.
R
Φ
D(f)
e
(f)
*
D (e )
f
R
R
Fig. 1.3 Content and cocontent
If the constitutive relationship Φ
R
(f) is linear the content and cocontent
will be equal. In particular, consider the case where e
R
= −e = Φ
R
(f) = Rf,
where R is a constant resistance, then
D(f) =
Z
f
0
Φ
R
(f) df =
Z
f
0
Rf df = Rf
2
/2,
D
∗
(e
R
) =
Z
e
R
0
Φ
−1
R
(e
R
) de
R
=
Z
e
R
0
(e
R
/R) de
R
= e
R
2
/2R = Rf
2
/2.
The content and cocontent for the linear resistors described above are listed
in Table 1.5.

20 1 A Unified System Representation
Translation Rotation Electrical Fluid
Content, D(f ) bv
2
/2 b
ω
ω
2
/2 Ri
2
/2 R
f
Q
2
/2
Cocontent, D
∗
(e
R
) F
2
/2b τ
2
/2b
θ
v
2
/2R P
2
/2R
f
Table 1.5 Energy dissipated by linear resistors
1.2.4 Constraint elements
Constraint elements define kinematic constraint relationships among the sys-
tem variables. These constraint elements can be described as transformers or
transducers.
• Transformers
A transformer transfers energy between the subsystems in the dynamic
system model. These idealized elements do not store, dissipate or generate
energy, and they behave in such a way that the net power into the device
is zero. In the case of transformers the energy transfer takes place within
the same engineering discipline. These elements give rise to displacement
constraints or flow constraints that do no work on the system.
• Transducers
A transducer are similar to a transformer however, the energy transfer
takes place between different engineering disciplines. These elements give
rise to displacement or flow constraints that do no work on the system.
Specific examples of transformers and transducers are given below.
Transformers
• Mechanical Translation:
The lever shown below represents a transformer for mechanical systems
in translation. Here, F
1
is the force input to left hand side of the lever,
and x
1
is the corresponding displacement. Similarly, F
2
is the force input
to right hand side of the lever, and x
2
is the corresponding displacement.
The lever makes angle θ with the horizontal axis, as shown.
1
θ
l
x
1
θ
2
l
F
2
x
2
F
1
For small displacements the following kinematic relationship holds,
x
1
= l
1
θ → θ = x
1
/l
1
,
x
2
= −l
2
θ → x
2
= −
l
2
l
1
x
1
.
1.2 System Components 21
In terms of the velocities these relations become
l
2
l
1
v
1
+ v
2
= 0,
where v
1
= dx
1
/dt and v
2
= dx
2
/dt. This equation represents a flow
constraint the lever must satisfy.
Now, summing moments about the pivot (counterclockwise positive) gives,
−F
1
l
1
+ F
2
l
2
= 0,
which is a constraint on the effort variables of the device. As a result, the
power balance yields
Power input + Power output = F
1
v
1
+ F
2
v
2
= (F
1
−
l
2
l
1
F
2
)v
1
= 0.
Hence, no energy is stored or dissipated in the device.
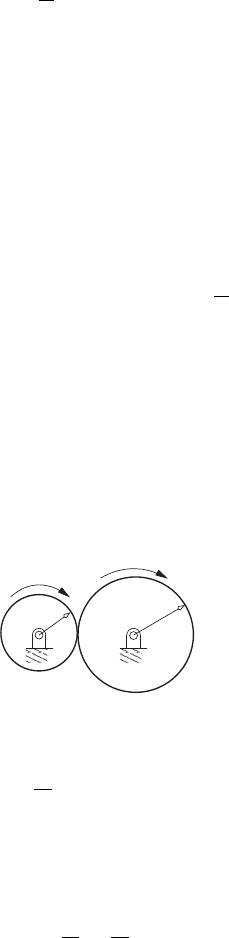
• Mechanical Rotation:
The simple gear train shown below represents a transformer for mechani-
cal systems in rotation. The torque input to the left hand gear is τ
1
, and
ω
1
is the corresponding angular velocity. Similarly, the torque input to the
right hand gear is τ
2
, and ω
2
is the corresponding angular velocity.
ω
2
1
r
r
τ
2
2
ω
1
τ
1
Since there is no slipping or backlash the velocity at the point of contact
is r
1
ω
1
= −r
2
ω
2
. Thus, from the kinematics we have
r
1
r
2
ω
1
+ ω
2
= 0,
which is a flow constraint the simple gear train must satisfy. By summing
the moments about the center of each gear, it can be seen that the force
at the point of contact satisfies
τ
1
r
1
=
τ
2
r
2
,
which is an effort constraint for the simple gear train. As a result, the
power balance satisfies

22 1 A Unified System Representation
Power input + Power output = τ
1
ω
1
+ τ
2
ω
2
= (τ
1
−
r
1
r
2
τ
2
)ω
1
= 0.
• Electrical:
A schematic of an ideal electrical transformer is shown below. This di-
agram shows two coils that are magnetically coupled via an iron core. The
coil on the left (the primary coil) has N
1
turns, applied voltage v
1
and cur-
rent i
1
. The current in the primary coil creates a magnetic flux φ = N
1
i
1
that induces a voltage v
2
in the coil on the right (the secondary coil).
Here, the secondary coil has N
2
turns and current i
2
. Dots are placed near
one of the terminals in each coil of the transformer to indicate whether
the magnetic flux produced by the coils add or subtract. By convention, if
current enters both dotted terminals the coils will produce magnetic fluxes
that add (Hambley, (1997), p. 686).
N
+
_
+
_
i i
v v
1
2
2
1
2
1
N
It is assumed that there is no flux leakage and the inductance of the coils
can be neglected. Then, a magnetomotive force balance gives,
N
1
i
1
+ N
2
i
2
= 0,
which is the flow constraint for the device. Also, from Faraday’s law we
have
v
1
=
dλ
1
dt
=
d(N
1
φ)
dt
= N
1
dφ
dt
,
v
2
=
dλ
2
dt
=
d(N
2
φ)
dt
= N
2
dφ
dt
,
v
2
=
N
2
N
1
v
1
,
which is the effort constraint that the device must satisfy. The power
balance gives
Power input + Power output = v
1
i
1
+ v
2
i
2
1.2 System Components 23
= (v
1
−
N
1
N
2
v
2
)i
1
= 0.
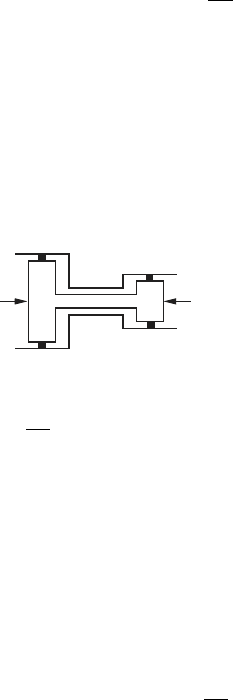
• Fluid:
The diagram below shows a fluid transformer. On the left hand side of
the device the pressure is P
1
, the volume flow rate is Q
1
and the area of
the piston is A
1
. On the right hand side of the device the pressure is P
2
,
the volume flow rate is Q
2
and the area of the piston is A
2
.
1
A
A
2
P
P
2
Q
2
Q
1
1
Using these definitions the velocity of the piston is Q
1
/A
1
= −Q
2
/A
2
, or
A
2
A
1
Q
1
+ Q
2
= 0,
which is the flow constraint that the device must satisfy. Moreover, if the
piston is assumed to be massless, the net force acting on the piston is
P
1
A
1
− P
2
A
2
= 0,
which is a constraint on the effort variables for the device. Finally, the
power balance gives
Power input + Power output = P
1
Q
1
+ P
2
Q
2
= (P
1
−
A
1
A
2
P
2
)Q
1
= 0.
Transducers
Some examples of transducer elements are described next. Recall that trans-
ducers are system components that transfer energy from one engineering
discipline to another.
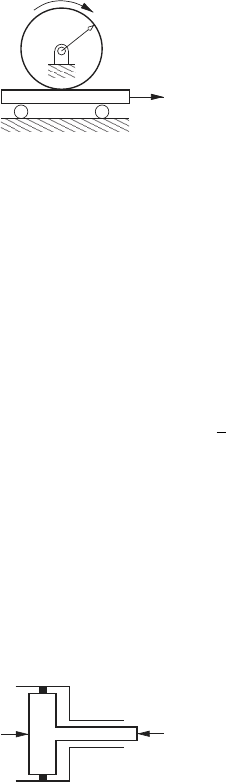
• Mechanical Transducer:
A rack and pinion system shown below is an example of a mechanical
transducer. This device couples a gear (in rotation) with a rack (in transla-
tion). The torque associated with the gear is τ , and ω is the corresponding
angular velocity. The rack has a force F and velocity v.
24 1 A Unified System Representation
τ
r
v
F
ω
If there is no slipping or backlash the system satisfies the flow constraint
v + rω = 0.
Moreover, if the system is inertialess, summing the moments about the
center of the gear gives
F r − τ = 0,
which is the effort constraint that must be satisfied. The power balance
for the system gives
Power input + Power output = F v + τω
= (F −
1
r
τ)v = 0.
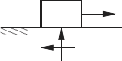
• Fluid-mechanical Transducer:
The hydraulic press shown below is an example of a fluid-mechanical trans-
ducer. In this device an incompressible fluid with volume flow rate Q and
pressure P acts on a massless piston with area A. The piston has an applied
force F and velocity v in the direction shown.
v
A
Q
P
F
It is assumed that the piston does not deform hence, we have
v + Q/A = 0,
which is the flow constraint that the device must satisfy. Since the piston
is massless, the net force acting on the piston is
−F + P A = 0,
which is the effort constraint that the device must satisfy. The power
balance for the system gives

1.2 System Components 25
Power input + Power output = F v + PQ
= (F − AP)v = 0.
1.2.5 Source elements
Power is input to the system via components called sources. These sources
occur in two forms effort sources, e
s
(t), and flow sources, f
s
(t). Moreover,
the sources can be ideal sources or regulated sources as described below.
Ideal sources
An ideal effort source will provide the specified effort to the system irrespec-
tive of the associated flow required by the system. An ideal flow source will
provide the specified flow to the system irrespective of the associated effort
required by the system. Note that the power available to these ideal sources
is infinite. An example of an ideal effort source is the voltage supplied by a
battery. An example of an ideal flow source is the volume flow rate provided
by a pump. These ideal sources are convenient to use in modeling dynamic
systems. However, it should be noted that they do not exists in reality, since
actual energy sources can not provide infinite power.
The symbolic representations of the ideal sources used in this text are
shown below.
(d)
SourceSource
Effort Flow
e(t)
+
f(t)
F(t)
Force Torque
τ(t)
(a) (b) (c)
Here, the + sign on the effort source, (a), indicates the positive polarity of
the source. We will use (a) to represent ideal voltage and pressure sources.
The ideal flow source is shown in (b), where the arrow indicates the direction
of positive flow. An applied force is shown in (c), and an applied torque is
shown in (d). In both cases the arrows indicate the direction of positive effort.
Regulated sources
At times it will prove expedient to model certain system elements as con-
trolled or regulated sources. Typically, these devices provide one of the fol-
lowing;
26 1 A Unified System Representation
1. An effort source that is a function of a flow variable, i.e, a flow regulated
effort source.
2. A flow source that is a function of an effort variable, i.e., an effort regulated
flow source.
3. An effort source that is a function of an effort variable, i.e., an effort
regulated effort source.
4. A flow source that is a function of a flow variable, i.e., a flow regulated
flow source.
Examples of these regulated sources are given below.
• Coulomb friction
The Coulomb friction force model is often used to describe the force of
interaction between objects. Consider an object moving on a rough sur-
face with velocity v, and let N be the normal reaction force of the surface
acting on the object.
N
f
v
Then the friction force acting on the object can be modeled as follows;
|f| ≤ |µ
s
N|, v = 0,
f = −µ
k
Nv/|v|, v 6= 0.
(a)
Thus, when the system is in static equilibrium, i.e., v = 0, the upper bound
on the friction force is |µ
s
N| where, µ
s
is the coefficient of static friction.
The magnitude and direction of the static friction force is determined by
the equations of equilibrium.
If there is sliding between the objects, i.e., v 6= 0, then the sliding friction
force has a constant magnitude, µ
k
N, and acts opposite to the direction
of motion. The constant µ
k
is called the coefficient of kinetic friction, and
µ
k
≤ µ
s
. Hence, the Coulomb friction force can be considered to be a flow
regulated effort source. In this text we call the equations described in (a)
effort constraints. These effort constraint equations provide a relationship
between the effort variables and the flow (or displacement) variables in the
system.
• Diode
A diode can be modeled as an effort regulated flow source. In particu-
lar, let v
d
represent the voltage (effort) across the terminals of the diode,
and i be the current (flow) through the diode.
1.2 System Components 27
v
+
d
_
i
A diode essentially acts as a switch where i > 0 if v
d
> 0, and i = 0 if
v
d
≤ 0. An approximate model for the behavior of the diode is given by
the effort constraint equation
i − I
s
(e
αv
d
− 1) = 0,
where I
s
> 0 and α > 0 are constants that are determined by the material
properties of the diode. The variable I
s
is called the reverse saturation
current and has a typical value of 1 × 10
−12
amp. The variable α is the
inverse of the thermal voltage, and at room temperature it has a typical
value of 40 1/volt. Hence, the diode can be modeled as an effort regulated
flow source.
We also note that a fluid flow check valve can be modeled as a diode type
device. In this case the fluid flows through the check valve (i.e., diode)
if the pressure drop across the valve is positive. As a result, the fluid
flow through the check valve can be approximated by the effort constraint
equation
Q − Q
s
(e
αP
d
− 1) = 0,
where Q
s
> 0 and α > 0 are constants, and P
d
is the pressure across the
valve.
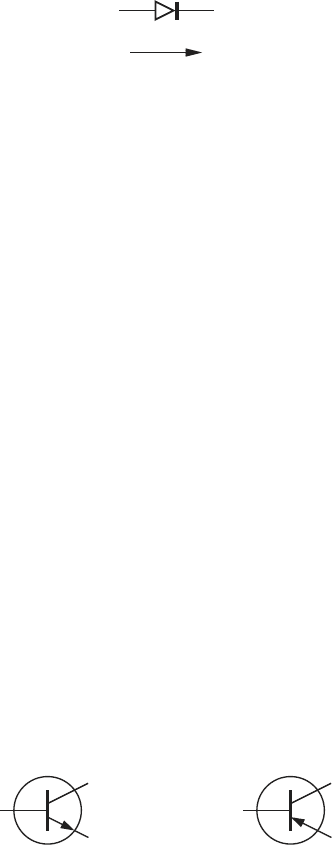
• Bipolar Junction Transistor
A bipolar junction transistor can also be modeled as an effort regulated
flow source. The figure below shows the schematic of a NPN transistor
and a PNP transistor. These devices have three terminals, a base (B), a
collector (C) and an emitter (E).
(a)
B
C
E
B
C
E
NPN Transistor PNP Transistor
(b)
The input-output behavior for these devices can be described using the
Ebers-Moll transistor model (see Jensen and McNamee, 1976, pp. 781). In
the case of the NPN transistor the Ebers-Moll model yields the equiva-
lent circuit shown below. (The Ebbers-Moll model for a PNP transistor is
obtained reversing the current flow directions in the NPN model.)