Fabien B. Analytical System Dynamics: Modeling and Simulation
Подождите немного. Документ загружается.

108 2 Kinematics
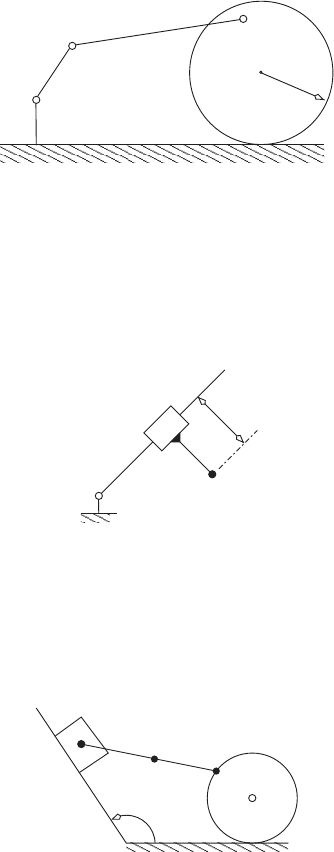
22. The mechanism shown below has revolute joints at A, B, and C, and the
disk rolls on the ground without slipping at E. Find the equations neces-
sary to determine the configuration of the mechanism at all times. If the
crank has an angular velocity 2π radians/second, determine the position
and velocity of the points C and D (the center of the disk). The mech-
anism has the following proportions: QA = 0.5, AB = 1.0, BC = 5.0,
CD = 2.5, and r = 3.
Q
C
B
E
r
D
A
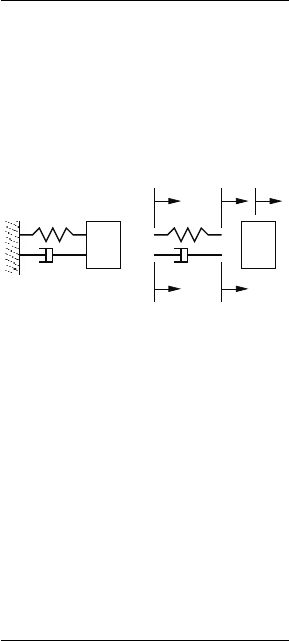
23. The mechanism shown below is an R-C robot. The link AD is connected
to the ground at A via a revolute joint. Moreover, the rotation at A takes
place about an axis that is perpendicular to the page. The link BE is
connected to the link AB via a cylindrical joint at B. The link BE can
translate along the line AD, and rotate about the line AD. Find a set of
equations to determine the position and velocity of the point E.
C
A
B
D
E
a
R
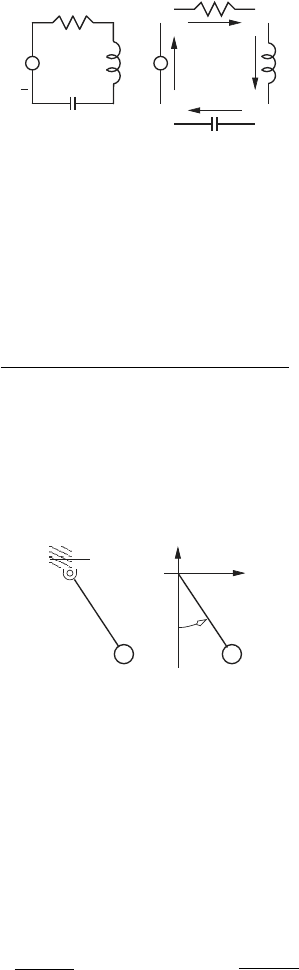
24. Determine the equations required to compute the position and velocity of
the point D on the mechanism shown here. The slider A stay in contact
with the wall while the disk CB rolls without slipping. The link AB is
attached to the slider via a revolute joint at A, and it is attached to the
disk via a revolute joint at B. Use the following dimensions: AB = l,
AD = d, and CB = r is the radius of the disk. The angle α is fixed.
α
B
A
D
C

Chapter 3
Lagrange’s Equation of Motion
This chapter develops Lagrange’s equation of motion for a class of multi-
discipline dynamic systems. To derive Lagrange’s equation we utilize some
concepts from analytical dynamics, and the first law of thermodynamics. By
carrying out the development using the fundamental variables it is clear that
the results obtained are applicable to all the engineering disciplines described
in Chapter 1.
Section 3.1 introduces the concepts of generalized displacement, virtual
displacement and virtual work. In Section 3.2 Lagrange’s equation of motion
is derived starting from the first law of thermodynamics. In Section 3.3 vari-
ous examples are used to illustrate the application of Lagrange’s equation to
mechanical, electrical, fluid, and multidiscipline systems.
3.1 Analytical Dynamics
As discussed in Chapter 1 dynamic systems can be described as an assemblage
of inductors, capacitors, resistors, constraint elements and sources. Associated
with each of these elements is the set of fundamental variables displacement,
q, flow, f, effort, e, and momentum, p. From Paynter’s diagram (Fig. 1.4)
it can be observed that all four variables are not all required to determine
the state of the system at any time. In fact only two of the fundamental
variables are required to determine the states of the system since, the other
two variables can be determined using the system properties and the differ-
ential/integral relationship between the variables.
In Lagrangian dynamics the displacement and flow variables are used to
describe the system behavior. In the Hamiltonian description of dynamic
systems the momentum and displacement variables are used to describe the
system. The bond graph and linear graph description of dynamic systems use
the effort and flow variables to describe the system behavior.
B. Fabien, Analytical System Dynamics: Modeling and Simulation, 109
DOI 10.1007/978-0-387-85605-6 3,
c
Springer Science+Business Media LLC 2009
110 3 Lagrange’s Equation of Motion
3.1.1 Generalized variables
The number of displacement and flow variables that can be assigned to a dy-
namic system can be quite large. However, for each system there is a minimum
number of displacement variables that are required to uniquely determine the
state or configuration of the system. This minimum set of displacement vari-
ables are called the generalized displacements. The corresponding set of flow
variables are called the generalized flows. The number of generalized dis-
placement variables used to the describe the system is equal to the number
of degrees of freedom. (See Section 2.2 and Section 2.3.)
Example 3.1.
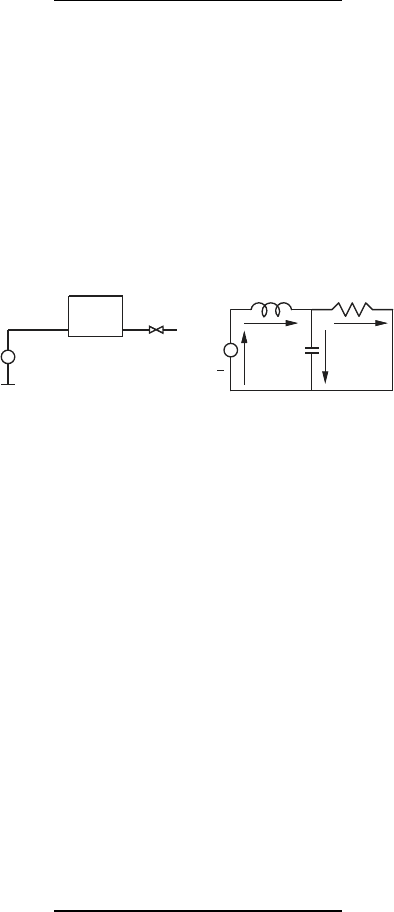
Consider the spring, mass damper system shown in Figure 3.1a. Figure
3.1b shows the displacement coordinates assigned to the system components.
Assigned to the mass is the displacement, x
1
. The left and right end of the
(b)
b
k
m
x
x
x x
x
1
3
2
4
5
(a)
Fig. 3.1 Spring-mass-damper
spring are assigned displacement variables x
2
, and x
3
, respectively. The left
and right end of the damper are assigned displacement variables x
4
, and x
5
,
respectively Since the left end of the spring and damper are fixed, it is clear
that x
2
= x
4
= 0. Also, since the right ends of the spring and damper are
attached to the mass we have x
5
= x
3
= x
1
. Thus, the system can be de-
scribed using the single displacement variable x
1
, and the the corresponding
flow variable v
1
. This system has 1 degree of freedom with x
1
being the the
generalized displacement and v
1
the corresponding generalized flow.
Example 3.2.
Figure 3.2a shows a resistor, R, an inductor, L, and a capacitor, C, in series
with a voltage source, v. Figure 3.2b shows the flow variables assigned to the
system components. The current i
1
is assigned to the voltage source, i
2
to
the resistor, i
3
to the inductor, and i
4
to the capacitor. However, Kirchhoff’s
3.1 Analytical Dynamics 111
i
(a)
+
R
(b)
C
Lv i
1
i
2
i
4
3
Fig. 3.2 Resistor-inductor-capacitor
current law states that the currents flowing into a node must sum to zero. As
a result, i
1
= i
2
, i
2
= i
3
, i
3
= i
4
, and i
4
= i
1
. Thus, the system has 1 degree
of freedom (and only one flow variable is required). We can select i
1
as the
generalized flow variable, with q
1
=
R
i
1
dt as the generalized displacement.
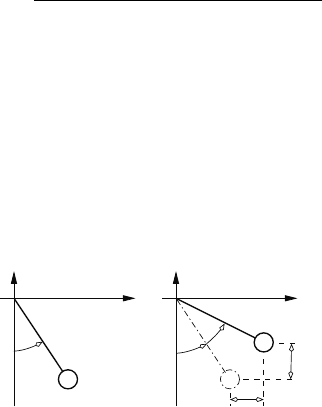
Example 3.3.
Figure 3.3a shows a simple pendulum. In this system the mass, m, is at-
tached to an inertialess rod of length l. The rod rotates freely about point
O.
(x,y)
l
θ
y
x
O
m
l
(b)(a)
Fig. 3.3 Simple pendulum
The configuration of the system can be described using the displacement
variables x and y. However, these variables are not independent. Since the
rod is rigid we must satisfy the displacement constraint
φ = x
2
+ y
2
− l
2
= 0. (a)
This displacement constraint can be used to eliminate x or y as follows:
x = ±
p
l
2
− y
2
(b), y = ±
p
l
2
− x
2
(c).
Unfortunately, the transformation (b) gives an ambiguous result when y = 0,
and the transformation (c) gives an ambiguous result when x = 0.
Alternatively, the angle θ can be used to establish that
112 3 Lagrange’s Equation of Motion
φ
1
= x − l sin θ = 0 (d), φ
2
= y + l cos θ = 0 (e).
Thus, if θ is known we can unambiguously determine x and y using the
constraints φ
1
and φ
2
.
Clearly, this system has 1 degree of freedom, and we can select θ as the
generalized displacement, with
˙
θ as the generalized flow.
Example 3.4.
Figure 3.4a shows a hydraulic system consisting of a pump that delivers
fluid at a desired pressure to a long pipe. The pipe is connected to a storage
tank which is in turn connected to a valve. A schematic of a model for the
system is shown in Fig. 3.4b. The model has an effort source P for the pump,
the inertia of the fluid in the long pipe is model using L
f
, the capacitance of
the tank is included in C
f
, and the resistance of the valve is modeled using
R
f
. The flow variables that describe the configuration of the system are Q
1
f
+
L
R
Q
4
Q
3
Q
1
Q
2
P
(a) (b)
Pump
Tank
Valve
Long
pipe
C
BA
f
f
Fig. 3.4 Hydraulic system
the volume flow through the pump, Q
2
the volume flow through the pipe,
Q
3
the volume flow stored in the tank, and Q
4
the volume flow through the
valve.
These four flow variables are not independent. Since there are no leaks in
the system, the continuity of flow requires that at node A,
ψ
1
= Q
1
− Q
2
= 0, (a)
and at node B,
ψ
2
= Q
2
− Q
3
− Q
4
= 0. (b)
Equations (a) and (b) represent flow constraints that must be satisfied. These
two equations can be used to eliminate two of the flow variables. Thus, the
system has 2 degrees of freedom. (Only two of the four variables are indepen-
dent.) Suppose we select Q
1
and Q
4
as the generalized flow variables. Then,
from (a) and (b) we get Q
2
= Q
1
and Q
3
= Q
1
− Q
4
, respectively.
3.1 Analytical Dynamics 113
From the examples above it can be observed that a system can be described
by N configuration coordinates say, u
1
, u
2
, ···, u
N
, that are different form the
n generalized displacements q
1
, q
2
, ···, q
n
. Here, n is the number of degrees
of freedom, and N ≥ n. Moreover, the n generalized displacements are all
independent.
3.1.2 Virtual displacements
A virtual displacement is a small displacement of the system that is (i) con-
sistent with the constraints, and (ii) takes place contemporaneously. It is the
second requirement that distinguishes virtual displacements from differential
displacements. (Here, a differential displacement a small displacement of the
system that is consistent with the constraints.)
To clarify the difference between differential displacements and virtual
displacements consider the following examples.
Example 3.5.
Figure 3.5a shows a simple pendulum with configuration displacements x
and y, and generalized displacement θ. From Example 3.3 we know that the
system satisfies the two displacement constraints
φ
1
= x − l sin θ = 0, φ
2
= y + l cos θ = 0.
Now, suppose the system undergoes a small displacement dθ that takes place
(x,y)
y
x
θδ
δd
y
= y
δ
d
x
x
=
l
θ
lθ
x
y
(a) (b)
(x,y)
Fig. 3.5 Virtual displacement: simple pendulum
over the time interval dt as shown in Fig. 3.5b. Then, the differential of the
constraints gives
dφ
1
= dx − (l cos θ)dθ = 0, dφ
2
= dy − (l sin θ)dθ = 0.
114 3 Lagrange’s Equation of Motion
Hence, for a differential displacement dθ, the configuration displacements that
are consistent with the constraints are dx = (l cos θ)dθ and dy = (l sin θ)dθ.
A virtual displacement is the same as a differential displacement but with
time held fixed, i.e., dt = 0. Let δθ denote a virtual displacement of the
generalized displacement θ, δx denote a virtual displacement of x, and δy
denote a virtual displacement of y. Then the variation of the constraints
gives
δφ
1
= δx −(l cos θ)δθ = 0, δφ
2
= δy − (l sin θ)δθ = 0.
Thus, in this case the virtual displacements and the differential displacements
are the same. Also, note that a variation is similar to a differential but with
time held fixed.
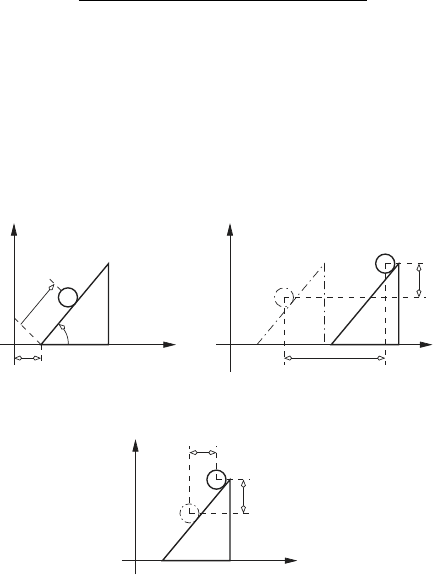
Example 3.6.
Figure 3.6a shows a particle that is constrained to move along a ramp that
has a fixed incline α. The ramp is free to move along the x-axis, and its
position is given by X = A sin ωt, where A and ω are constants, and t is the
time. The configuration displacements for the system are x and y, and the
generalized displacement is r. From the geometry of the system we get the
y
y
r
(x,y)
α
y
dx
dy
X
(a)
δ
δ
(b)
x
x
x
y
(c)
x
Fig. 3.6 Virtual displacement: moving ramp
two displacement constraints
φ
1
= x − A sin ωt −r cos α = 0,
φ
2
= y − r sin α = 0.

3.1 Analytical Dynamics 115
Now, suppose the system undergoes a small displacement, dr, that takes
place over the time interval dt as shown in Fig. 3.6b. Then, the differential
of the constraints gives
dφ
1
= dx − (Aω cos ωt)dt −dr cos α = 0,
dφ
2
= dy − dr sin α = 0.
On the other hand if the system undergoes a virtual displacement, δr,
then, the variation of the constraints gives
δφ
1
= δx −δr cos α = 0,
δφ
2
= δy − δr sin α = 0.
This variation is illustrated in Fig. 3.6c. In this case the differential displace-
ment dx, and the virtual displacement δx are not the same. This is due to the
fact that the constraint surface is moving, i.e., the constraint depends explic-
itly on time. Note also that the variation of the constraints can be obtained
from the differential of the constraints by setting dt = 0.
3.1.3 Virtual work
The virtual work is the work done by the efforts in carrying the system
through a virtual displacement, i.e.,
δW =
n
X
i=1
e
i
δq
i
. (3.1)
Here, δW is the virtual work, δq
i
are the virtual displacements, e
i
are the
applied efforts, and i = 1, 2, ···, n with n being the number of degrees of
freedom. Note that q
i
are the generalized displacements, and e
i
are the cor-
responding generalized efforts. The virtual work is also equal to the work
done by the flows in carrying the system through a virtual momentum, i.e.,
δW =
n
X
i=1
f
i
δp
i
, (3.2)
where δp
i
are the virtual momentum, and f
i
are the flows. Equations (3.1)
and (3.2) follow from the definitions of the increment in work, i.e., equations
(1.3) and (1.4), respectively.
An important consequence of the definition of virtual work is that con-
straint efforts do not contribute to the virtual work. This is most easily
illustrated via an example.
116 3 Lagrange’s Equation of Motion
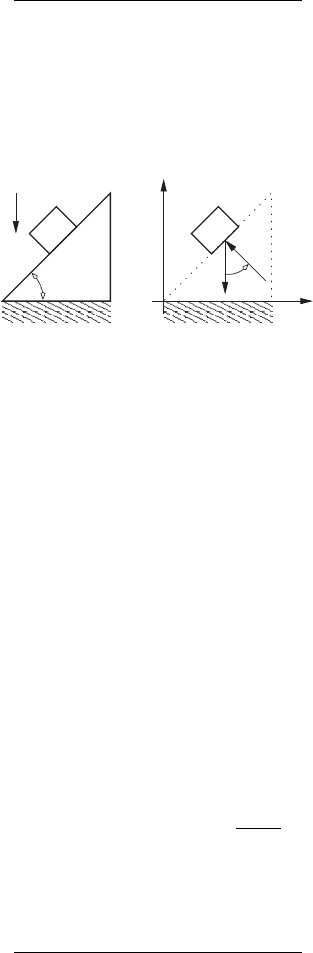
Example 3.7.
Figure 3.7a shows a mass, m, that is free to slide on a smooth ramp un-
der the influence of the acceleration due to gravity, g. The ramp is fixed
and has a fixed slope with angle α. A free body diagram for the mass is
x
m
g
α
(a)
gm
(b)
α
y
R
Fig. 3.7 Virtual work: constraint effort
shown in Fig. 3.7b. Here, the weight acts downward, and the reaction force
(i.e., the constraint effort), R, acts perpendicular to the ramp as shown. The
configuration displacements for the system are x and y.
The virtual work done by all the efforts acting on the mass is
δW = −mg δy + R cos α δy − R sin α δx. (a)
The mass is constrained to move along the ramp. Thus,
φ = y − x tan α, (b)
is a displacement constraint that must be satisfied. The variation of this
constraint gives
δφ = δy − δx tan α = 0. (c)
Using (c) in (a) gives
δW =
−mg + R cos α − R
sin α
tan α
δy
δW = −mg δy
Therefore, the constraint force, R, does no virtual work on the system.
The result obtained in Example 3.7 can be shown to be true in general.
In fact the constraint efforts are all perpendicular to the constraint surface,
while the virtual displacements take place tangent to the constraint surface.
Hence, the constraint efforts will make no contribution to the virtual work.

3.2 Lagrange’s Equations of Motion 117
In many cases the applied efforts are given in terms of the configuration
displacements instead of the generalized displacements. Such situations re-
quire that we use the relationship between the configuration and generalized
displacements to find expressions for the generalized efforts. In particular,
suppose u
i
are the configuration displacements, and E
i
are the correspond-
ing configuration efforts, for i = 1, 2, ···, N. Let q
i
be the generalized dis-
placements, and e
i
be the corresponding generalized efforts. Then, there are
transformation equations of the form
u
i
= U
i
(q
1
, q
2
, ···, q
n
) (3.3)
that relate the configuration and generalized displacements (see the examples
above).
The virtual work done by the applied efforts satisfies
δW =
N
X
i=1
E
i
δu
i
=
n
X
i=1
e
i
δq
i
.
But from (3.3) it can be seen that the virtual displacements δu
i
satisfy
δu
i
=
n
X
j=1
∂U
i
∂q
j
δq
j
.
Hence,
E
i
δu
i
= E
i
n
X
j=1
∂U
i
∂q
j
δq
j
,
which yields
e
i
=
N
X
j=1
E
j
∂U
j
∂q
i
. (3.4)
We will make use of this result in several of the examples to follow.
3.2 Lagrange’s Equations of Motion
In this section we develop Lagrange’s equation of motion for unconstrained
systems. By an unconstrained system we mean that the displacements used to
describe the system are independent hence, they represent a set of generalized
displacements. Constrained systems will be discussed in Chapter 4.
1
The first law of thermodynamics can be written as
1
An alternate derivation of Lagrange’s equation of motion, for multidiscipline systems, can
be developed by invoking Hamilton’s principle of least action. See for example, Wellstead
(1979); White and Woodson (1959); and Williams (1996).