Dunajski M. Solitons, Instantons, and Twistors
Подождите немного. Документ загружается.

306 B: Complex analysis
section of O(n), n ≥ 0, is same as a global function on C
2
homogeneous of degree
n (a polynomial). Thus we get an extension of Liouville theorem:
Theorem B.2.4 A holomorphic function on
C
2
homogeneous of degree n > 0 is
of the form
f (Z)=φ
AB···C
Z
A
Z
B
···Z
C
for some symmetric constant ‘spinor’ φ
AB···C
.
r
Example. Tangent and cotangent bundles. Holomorphic vector fields on CP
1
are sections of the holomorphic tangent bundle TCP
1
. Holomorphic one-forms
are sections of the holomorphic cotangent bundle T
∗
CP
1
. Observe that
∂
∂λ
= −λ
−2
∂
∂
˜
λ
and dλ = −λ
2
d
˜
λ.
We absorb the minus signs into the local trivializations, and deduce that
T
CP
1
= O(2) and T
∗
CP
1
= O(−2).
Therefore a global section of T
CP
1
is of the form
(uλ
2
+ xλ + v)
d
dλ
, (B5)
for (u, x,v) ∈
C
3
and there are no global section of T
∗
CP
1
.
r
Example. To any rank-k vector bundle E we assign a line bundle det E :=
k
(E).
It has transition functions det F
αβ
. Define the canonical bundle K of M to be
det(T
∗
M). This is the line bundle of holomorphic volume forms. On CP
1
we
have an isomorphism K
∼
=
O(−2).
The theorem of Grothendieck states that all holomorphic line bundles over a
rational curve are equivalent to O(n) for some n. In fact more is true
Theorem B.2.5 (Birkhoff–Grothendieck) A rank-k holomorphic vector bundle
E →
CP
1
is isomorphic to a direct sum of line bundles O(m
1
) ⊕···⊕O(m
k
) for
some integers m
i
.
This theorem is proved for example in [121].
Therefore for a rank k vector bundle the transition matrix
F :
C
∗
→ GL(k, C)
can be written in the form
F =
˜
H diag (λ
−m
1
,...,λ
−m
k
)H
−1
,
where H : U → GL(k,
C) and
˜
H :
˜
U → GL(k, C) are holomorphic.
r
Example. Let E
t
be a one-parameter family of rank-two vector bundles over CP
1
determined by a patching matrix
F =
λ t
0 λ
−1
.
B.3
ˇ
Cech cohomology 307
For t =0,F is already in the form given by the Birkhoff–Grothendieck theorem,
with H =
˜
H =1,m
1
= −1, and m
2
=1.Butfort = 0, we have
F =
0 t
−t
−1
λ
−1
10
t
−1
λ 1
, (B6)
so that m
1
= m
2
= 0 by Lemma B.2.2. Therefore E
0
" O(1) ⊕ O(−1), but E
t
is
the trivial bundle for t = 0. This is an example of ‘jumping’: as t changes through
0, the holomorphic structure of the bundle changes discontinuously, in spite of
the fact that the bundles E
t
are all the same (and all trivial) from the topological
point of view.
B.3
ˇ
Cech cohomology
An element of the first cohomology group of E → M relative to the cover U
α
of M
is a map that assigns a holomorphic section f
αβ
∈ (U
α
∩ U
β
) to each non-empty
intersection such that
f
αβ
+ f
βα
= 0 and f
αβ
+ f
βγ
+ f
γα
=0.
Two such maps f and f
are equivalent iff
f
αβ
− f
αβ
= h
α
− h
β
,
(the RHS is called a co-boundary) where h
α
is a holomorphic section of E over
U
α
. The first cohomology group is a quotient of the additive group { f
αβ
} by this
relation. (The definition is in fact independent of the covering chosen [121].) A
more concrete definition can be used if it is possible to choose an open cover
consisting on two pseudo-convex sets U and
˜
U:
H
1
(M, E)=
(U ∩
˜
U, E)
(U, E)+(
˜
U, E).
We will find H
1
(CP
1
, O(k)). This is the space of functions f
01
holomorphic on
U
0
∩ U
1
and homogeneous of degree k in coordinates [Z
0
, Z
1
], modulo cobound-
aries. In a trivialization over U
0
= Uf
01
is represented by a holomorphic function
f on
C
∗
. In the trivialization over U
1
=
˜
U, f
01
is represented by λ
−k
f . For k ≥−1
we can write
f =
∞
−∞
f
i
λ
i
= λ
k
˜
h − h,
where
h = −
∞
0
f
i
λ
i
and
˜
h =
∞
1
f
−i
λ
−i−k
308 B: Complex analysis
are holomorphic in U and
˜
U, respectively. Therefore f ∼ 0, and the first cohomol-
ogy group vanishes. The splitting is not unique unless k = −1, as we are free to set
the first k + 1 terms in h to 0 by modifying
˜
h.
If k ≤−2 we have f = λ
k
˜
h − h + q, where
−h =
∞
0
f
i
λ
i
,
˜
h =
∞
−k
f
−i
λ
−i−k
, and q =
−k−1
1
f
−i
λ
−i
.
The functions h and
˜
h are holomorphic in U and
˜
U, respectively, therefore f ∼ q,
and the class of f is uniquely determined by the coefficients f
−1
,..., f
k+1
.We
conclude that
H
1
(CP
1
, O(k)) =
0fork > −2
C
−k−1
for k ≤−2.
(B7)
Therefore f ∈ H
1
(CP
1
, O(−1)) can be split uniquely, as f =
˜
h − h. We shall often
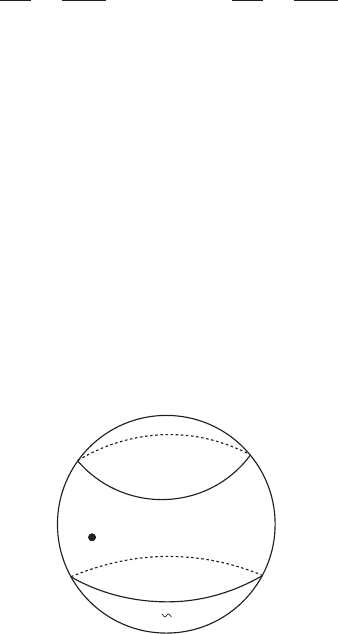
use the explicit form of this splitting:
h =
1
2πi
f (ζ )
λ − ζ
dζ and
˜
h =
1
2πi
˜
f (ζ )
λ − ζ
dζ, (B8)
where ζ is an affine coordinate on
CP
1
(Figure B.1). The contours and
˜
are
homologous to the equator of
CP
1
in U ∩
˜
U and are such that −
˜
surrounds the
point λ = ζ . We see that f =
˜
h − h follows from the Cauchy’s integral formula.
Given f ∈ H
1
(CP
1
, O(k)), k > −1, we may divide it by a homogeneous polyno-
mial of degree k + 1, and apply (B8) to the quotient. The non-uniqueness of this
procedure (the choice of the polynomial) is measured by H
0
(CP
1
, O(k + 1)).
B.3.1 Deformation theory
Let L be a complex submanifold of a complex manifold Z. The normal bundle
N(L) → L is defined to be ∪
ζ ∈L
N
ζ
(L) where N
ζ
=(T
ζ
Z)/(T
ζ
L) is a quotient vector
space.
The following result of Kodaira underlies the twistor approach to curved geome-
tries. Let Z be a complex manifold of dimension d + r. A pair (F , M) is called a
complete analytic family of compact submanifolds of Z of dimension d if
G
G
Î = Ê
Figure B.1 Splitting formula
B.3
ˇ
Cech cohomology 309
r
F is a complex analytic submanifold of Z × M of co-dimension r with the
property that for each t ∈ M the intersection L
t
× t := F ∩ (Z ×t) is a compact
submanifold of Z × t of dimension d.
r
There exists an isomorphism
T
t
M " H
0
(L
t
, N
t
) (B9)
where L
t
⊂ Z is submanifold of Z and N
t
−→ L
t
is the normal bundle of L
t
in
Z.
Theorem B.3.1 (Kodaira [95]) Let L be a d-dimensional complex compact sub-
manifold of a complex manifold Z, and let N be the normal bundle of L in Z.If
H
1
(L, N)=0then there exists a complete analytic family of compact submanifolds
(F, M) such that L = L
t
0
for some t
0
∈ M.
In Chapter 10 we apply the above theorem to the situation when Z is a twistor
space and L =
CP
1
. Roughly speaking, the moduli space M is the ‘arena’ of
differential geometry and integrable systems. One way to analyse such moduli
spaces is to consider infinitesimal deformations and to exponentiate them.

APPENDIX C
Overdetermined PDEs
C.1 Introduction
This appendix treats geometric approaches to DEs, both ODEs and PDEs.
Geometry in this context means that certain results do not depend on coordinate
choices made to write down a DE, and also that structures like connection and
curvature are associated to DEs.
The subject can get very technical but we shall take a low-technology approach.
This means that sometimes, for the sake of explicitness, a coordinate calculation
will be performed instead of presenting an abstract coordinate-free argument.
We shall also skip some proofs, and replace them by examples illustrating the
assumptions and applications. The proofs can be found in [23] (see also [90] and
[151]).
Given a system of DEs it is natural to ask the following questions:
r
Are there any solutions?
r
If yes, how many?
r
What data is sufficient to determine a unique solution?
r
How to construct solutions?
These are all local questions, that is, we are only interested in a solution in a small
neighbourhood of a point in a domain of definition of dependent variables. We
shall mostly work in the smooth category, except when a specific reference to the
Cauchy–Kowalewska theorem is made. This theorem holds only in the real analytic
category.
Problem 1. Consider an ODE
du
dx
= F (x, u) (C1)
where F and ∂
u
F are continuous
1
in some open rectangle
U = {(x, u) ∈
R
2
, a < x < b, c < u < d}.
The Picard theorem states that for all (x
0
, u
0
) ∈ U there exists an interval I ⊂ R
containing x
0
such that there is a unique function u : I → R which satisfies (C1)
1
In fact it is sufficient if F is Lipschitz.
C.1 Introduction 311
and such that u(x
0
)=u
0
. We say that the general solution to this first-order ODE
depends on one constant. The unique solution in Picard theorem arises as a limit
u(x) = lim
n→∞
u
n
(x)
of a uniformly convergent sequence of functions {u
n
(x)} defined iteratively by
u
n+1
(x)=u
0
+
x
x
0
F (t, u
n
(t))dt.
One can treat a system of n first-order ODEs with n unknowns in the same way:
The unique solution depends on n constants of integration.
The conditions in Picard theorem always need to be checked and should not be
taken for granted. For example, the ODE
du
dx
= u
1/2
, u(0) = 0
has two solutions in any neighbourhood of (0, 0): u(x)=0andu(x)=x
2
/4.
More geometrically, the solutions to (C1) are curves tangent to a vector field
X =
∂
∂x
+ F (x, u)
∂
∂u
.
The Picard theorem states that the tangent directions always fit together to form a
curve.
One can rephrase this in a language of differential forms. The one-form annihilated
by X is (a multiple of) θ = du − Fdx and a parameterized curve x → (x, u(x)) is
an integral curve of (C1) if θ (or any of its multiples) vanishes on this curve. In
general, if θ is a k-form on a manifold M the submanifold S ⊂ M is an integral of
θ if f
∗
(θ)=0,where f : S → M is an immersion.
We aim to reformulate systems of DEs as the vanishing of a set of differential
forms (in general of various degree). This gives a coordinate invariant formulation
of DEs as exterior differential systems (EDSs), and allows a discussion of the
dimension of integral manifold.
Problem 2. Consider a system of PDEs
u
x
= A(x, y, u) and u
y
= B(x, y, u), (C2)
where u
x
= ∂
x
u, etc. Both derivatives of u are determined at each point (x, y, u) ∈
R
3
where A, B, A
u
, and B
u
are continuous. This gives rise to a two-dimensional
312 C: Overdetermined PDEs
plane spanned by two vectors
X
1
=
∂
∂x
+ A
∂
∂u
and X
2
=
∂
∂y
+ B
∂
∂u
.
Do these planes fit together to form a solution surface in a neighbourhood of (say)
(0, 0, u
0
) ∈ R
3
? Let us try two successive applications of Picard theorem.
r
Set y =0, u(0, 0) = u
0
. The Picard theorem guarantees the existence of the unique
˜
u(x) such that
d
˜
u
dx
= A(x, 0,
˜
u),
˜
u(0) = u
0
.
r
Consider
˜
u(x) and hold x fixed, regarding it as a parameter. Picard theorem gives
the unique u(x, y) such that
du
dy
= B(x, y, u), u(x, 0) =
˜
u(x).
We have therefore constructed a function u(x, y) but it may not satisfy the original
PDE (C2) which is overdetermined and requires that the compatibility condition
(u
x
)
y
=(u
y
)
x
holds. Expanding the mixed partial derivatives yields
A
y
− B
x
+ A
u
B − B
u
A =0. (C3)
Do we need more compatibility conditions arising from differentiating (C3) and
using (C2) to get rid of u
x
, u
y
? The answer is no. This follows from the Frobenius
theorem which we are going to prove in Section C.2 (the LHS of (C3) is the
obstruction to the vanishing of the commutator [X
1
, X
2
]). If (C3) holds then
solving the pair of ODEs gives the solution surface depending on one constant.
What happens if (C3) does not hold?
r
If u does not appear in (C3) then (C3) is a curve in R
2
and there is no solution in
an open set containing (0, 0, u
0
).
r
If (C3) gives an implicit algebraic relation between (x, y, u), then solve this
relation to get a surface (x, y) → (x, y, u(x, y)). This may or may not be a solution
to the original pair of PDEs (C2). In particular the initial condition may not be
satisfied.
This simple example raises a number of questions. How should we deal with more
complicated compatibility conditions? When can we stop cross-differentiating?
Theorems C.3.1 and C.3.2 proved in Section C.3 and more generally the Cartan
test (Theorem C.6.5) discussed in Section C.6 give some of the answers.
Problem 3. Consider a system of linear PDEs
u
x
= αu + βv, u
y
+ v
x
= γ u + δv, and v
y
= u + φv, (C4)

C.1 Introduction 313
where α,β,...,φ are some functions of (x, y) defined on an open set U ⊂ R
2
. This
is an overdetermined system as there are three equations for two unknowns, but
(unlike the system (C2)) it is not overdetermined enough, as the partial derivatives
are not specified at each point. Therefore we cannot start the process of building
the solution surface as we cannot specify the tangent planes. One needs to use
the process of prolongation and introduce new variables for unknown derivatives
hoping to express derivatives of these variables using the (differential consequences
of) the original system. In our case it is enough to define
w = u
y
− v
x
(there are other choices, e.g. w = u
y
, but the solution surface will not depend on
the choices made). Now
u
y
=
1
2
(γ u + δv + w) and v
x
=
1
2
(γ u + δv − w),
and we can impose the compatibility conditions
(u
y
)
x
=(u
x
)
y
, and (v
y
)
x
=(v
x
)
y
.
These conditions will lead to expressions
w
x
= ... and w
y
= ...,
where (...) denote terms linear in (u,v,w). The system is now closed as first
derivatives of (u,v,w) are determined at each point thus specifying a family of
two-dimensional planes in
R
5
. Do these two planes fit in to form a solution surface
(x, y) −→ (x, y, u(x, y),v(x, y),w(x, y))
in
R
5
? Not necessarily, as there are more compatibility conditions to be imposed
(e.g. (w
x
)
y
=(w
y
)
x
). These additional conditions will put restrictions of the func-
tions (α,β,...,φ). In Section C.4 we shall see how to deal with the prolongation
procedure systematically.
This simple example of prolongation arises naturally in the geometry of surfaces.
Assume you are given a metric (a first fundamental form) on a surface
g = Edx
2
+2Fdxdy+ Gdy
2
.
Does there exist a one-form K = udx + vdy such that the Killing equations
∇
(i
K
j)
= 0 and x
i
=(x, y)
are satisfied, where ∇ is the Levi-Civita connection of g? Expanding the Killing
equations in terms of the Christoffel symbols leads to the system (C4) where the
six functions (α,β,...,φ) are given in terms of E, F, G, and their derivatives.
The consistency conditions for the prolonged system to admit non-zero solutions
give differential constraints on E, F , and G. These constraints can be expressed
in tensor form as differential invariants of the metric g. In Section C.4.1 we
shall discuss an approach to constructing such invariants and find necessary and
sufficient conditions of a metric g to admit a Killing vector.

314 C: Overdetermined PDEs
C.2 Exterior differential system and Frobenius theorem
Definition C.2.1 An EDS is a pair (M, I) where M is a smooth manifold and
I ⊂
∗
(M) is a graded differential ideal in a ring of differential forms that is closed
under exterior differentiation:
dθ ∈ I if θ ∈ I.
For example, the set of forms
{dy − pdx, dp ∧ dx, dx}
gives EDS where M =
R
3
. We shall use the following notation: I
k
= I ∩
k
(M)is
a set of all forms of degree k in I. The evaluation of a form θ at x ∈ M will be
denoted θ
x
and I
x
will denote the evaluation of all forms in I at x.
One way to present an EDS is by specifying the set of differential generators
<θ
1
,...,θ
n
>
diff
:= {γ
1
∧ θ
1
,...,γ
n
∧ θ
n
,β
1
∧ dθ
1
,...,β
n
∧ dθ
n
},
where γ and β are arbitrary differential forms. We shall assume that none of the
generators are zero-forms (i.e. functions). Otherwise we shall restrict the EDS to
submanifolds on which these functions vanish. An EDS whose generators are one-
forms is called a Pfaffian system.
We shall also use the notation
<θ
1
,...,θ
n
>
alg
:= {γ
1
∧ θ
1
,...,γ
n
∧ θ
n
}
to denote the set of forms generated algebraically by exterior multiplication.
Definition C.2.2 An integral manifold of I is a submanifold f : S → M such that
f
∗
(θ)=0for all θ ∈ I.
In particular S is an integral submanifold of I = <θ
1
,...,θ
n
>
diff
iff f
∗
(θ
i
)=0.
r
Example. A system of N first-order ODEs
du
α
dx
= F
α
(x, u
1
,...,u
N
),α=1,...,N
is modelled by the EDS I generated by N one-forms <du
α
− F
α
dx>
diff
on an
open set in
R
N+1
. The integral manifolds of this EDS are integral curves of the
vector field
X =
∂
∂x
+
N
α=1
F
α
∂
∂u
α
which annihilates all forms in I.
r
Example. The pair of PDEs u
x
= A(x, y, u) and u
y
= B(x, y, u) is modelled by an
ideal generated by one one-form
I = <du − Ad x − Bdy>.
C.2 Exterior differential system and Frobenius theorem 315
The vectors ∂
x
+ A∂
u
and ∂
y
+ B∂
u
annihilating this one-form are tangent to the
integral surface if one exists. There are no integral surfaces if the compatibility
(C3) does not hold.
Two EDSs (M, I) and (
ˆ
M,
ˆ
I) are equivalent if there exist a diffeomorphism such
that
f : M −→
ˆ
M and f
∗
(
ˆ
I)=I.
This notion can be applied to determine whether two systems of DEs are equivalent
and, in particular, to linearize some DEs. In the next two examples we shall use the
following notation: if θ = θ
j
(x
1
,...,x
i
) dx
j
then
ˆ
θ = θ
j
(
ˆ
x
1
,...,
ˆ
x
i
) d
ˆ
x
j
where x
j
and
ˆ
x
j
are local coordinates on M and
ˆ
M, respectively.
r
Example. Consider the Monge–Ampere equation
u
xx
u
yy
− u
2
xy
=1,
where u = u(x, y). This non-linear equation is modelled by the EDS
<θ
1
= du − pdx − qdy,θ
2
= dp ∧ dq − dx ∧ dy>
diff
(C5)
on
R
5
. In particular, it is not a Pfaffian system. Consider f : R
5
→ R
5
given by
f (x, y, u, p, q)=(
ˆ
x,
ˆ
y,
ˆ
u,
ˆ
p,
ˆ
q):=(x, q, u − qy, p, −y).
We verify that
f
∗
(
ˆ
θ
1
)=d
ˆ
u −
ˆ
pd
ˆ
x −
ˆ
qd
ˆ
y = du − pdx −qdy and
f
∗
(
ˆ
θ
2
)=d
ˆ
p ∧ d
ˆ
q − d
ˆ
x ∧ d
ˆ
y = dy ∧ dp + dq ∧ dx.
The integral manifolds of the pulled-back ideal are
du − pdx − qdy = 0 and dy ∧dp + dq ∧ dx =0.
Vanishing of the one-form gives p = u
x
, q = u
y
, and vanishing of the two-form
gives the linear Laplace equation
u
xx
+ u
yy
=0.
Some care needs to be taken with this example: We have established a one-to-
one correspondence between integral surfaces of the Laplace equation and the
Monge–Ampere equation, but not between solutions as some integral surfaces
may have dx ∧ dy =0.
r
Example. A similar procedure can be used to reduce the general four-dimensional
Ricci-flat Kähler metric with a tri-holomorphic Killing vector to the Gibbons–
Hawking form where the non-linear Ricci-flat condition reduces to the Laplace
equation on
R
3
. Consider a Kähler metric in an open ball in C
2
with local
holomorphic coordinates (w, z) given in terms of the (non-holomorphic) Kähler
potential :
C
2
−→ R:
g =
w ¯w
dw d ¯w +
w
¯
z
dw d
¯
z +
z ¯w
dzd ¯w +
z
¯
z
dzd
¯
z. (C6)