Драчев В.Н. Учет циркуляции при плавании в стесненных районах
Подождите немного. Документ загружается.

33
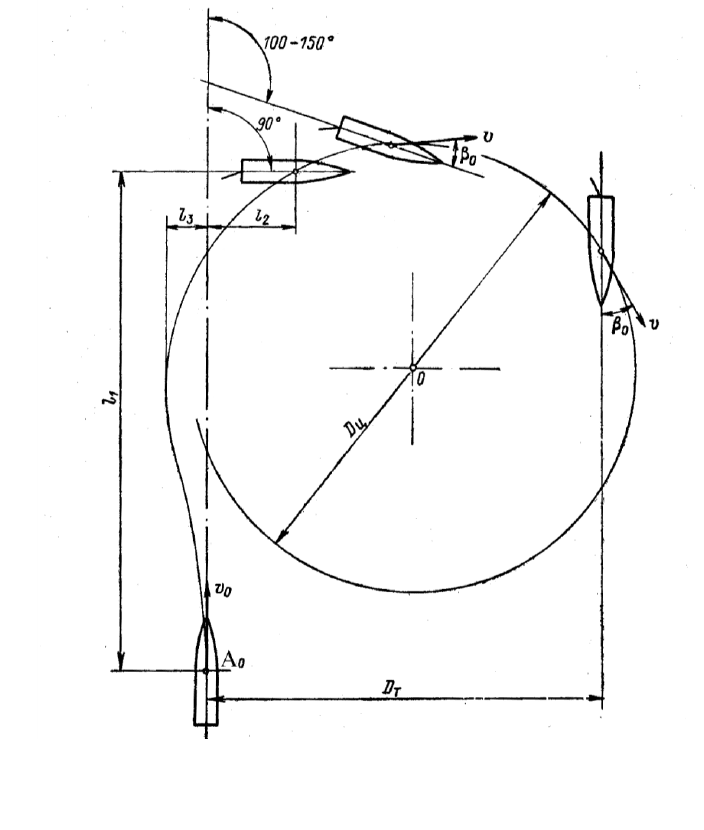
Рис. 6.6. Положение судна во время циркуляции
При смене курса лучше всего поворот производить с максималь-
ной перекладкой руля 20
о
. Совершая плавание в стесненных водах,
судно всегда следует с пониженной скоростью, поэтому перекладка
руля на 20
о
возможна. Рассчитывая поворот, судоводитель не всегда
может учесть и принять во внимание внешние силы, которые могут
воздействовать на судно при смене курса. По этой причине судно мо-
жет не вписаться в рассчитанную траекторию. Учитывая угол пере-
кладки руля, судоводитель всегда должен предусматривать дополни-
тельную перекладку руля в сторону увеличения при необходимости.
Перекладку в сторону уменьшения действия можно производить с
любой величины и в любой момент.
Для примера рассмотрен поворот судна на 90
о
и его положение на
траектории во время циркуляции.
34
В момент, когда курс судна изменен на 90
о
, центр тяжести судна
находится на расстоянии l
1
(выдвиг) от точки перекладки руля и на
расстоянии l
2
(прямое смещение) от линии первоначального движения,
измеренное по нормали к направлению движения (см. рис. 6.6). При
этом все время поворота перекладка руля остается неизменной.
Если провести касательную к циркуляции под углом 90
о
к линии
первоначального движения (до начала циркуляции), то в точке касания
траектории, которая выполнена при постоянно переложенном руле,
курс судна будет равняться величине от 100
о
до 150
о
в зависимости от
угла перекладки руля. Угол между диаметральной плоскостью судна и
вектором окружной скорости его центра тяжести называется углом
дрейфа (β).
Величины l
1
и β зависят от угла перекладки руля и скорости судна.
В своей верхней точке траектории центра тяжести курс судна будет
равен 90
о
+ β, но именно в этой точке, по предложенному методу, суд-
но должно лечь на курс равный 90
о
, а β - равняться нулю.
В практике для поворота судна на новый курс руль перекладыва-
ется на заранее рассчитанный угол, и к моменту, когда изменение
курса достигает величины более половины ∆К, угол перекладки руля
уменьшается, а к моменту выхода на заданный курс скорость поворо-
та одерживается путем перекладки руля на противоположный борт.
При уменьшении угла перекладки руля диаметр циркуляции меня-
ется в сторону увеличения, меняется и скорость поворота в сторону
уменьшения, линейная скорость увеличивается, а угол дрейфа умень-
шается. В результате этих изменений центр тяжести судна начинает
движение по кривой, которая отличается от первоначальной увеличе-
нием диаметра циркуляции. В конечном счете, движение центра тяже-
сти судна переходит на новую траекторию движения и в определен-
ный момент для того, чтобы лечь на новый курс, необходимо одер-
жать поворот судна. В результате этого скорость поворота судна
стремительно падает, а радиус циркуляции резко увеличивается и
стремится к бесконечности в тот момент, когда судно ложится на за-
данный курс.
Для оценки точности поворота и выхода на новый курс методом
касательных использована математическая модель балкера со сле-
дующими данными:
водоизмещение
длина
ширина
осадка носом
осадка кормой
33089 т,
182,7 м,
22,6 м,
10,1 м,
10,7 м.
35
Вначале выполнена циркуляция с перекладкой руля 20
о
. Данные
по траектории движения сняты с интервалом 5
о
. Построена кривая
циркуляции. Для выполнения поворотов ∆К (угол поворота) разложен
на составляющие, каждой из которых соответствует свой угол пере-
кладки руля для выхода математической модели судна на заданный
курс. В общем случае ∆К будет иметь вид:
∆К = ∆К
1
+ ∆К
2
+ ∆К
3
+∆К
4
,
где
∆К -
расчетный угол поворота;
∆К
1
-
часть поворота, выполненная с рулем в положении 20
о
;
∆К
2
-
часть поворота, выполненная с рулем в положении 10
о
;
∆К
3
-
часть поворота, выполненная с рулем в положении «пря-
мо»;
∆К
4
-
часть поворота, выполненная с рулем в положении 5
о
противоположного повороту борта.
Поворот на угол ∆К рассчитан по циркуляции при положении ру-
ля 20
о
, следовательно, все построения касательных выполнены к этой
траектории. Рассмотрены углы поворотов от 20
о
до 90
о
с интервалом
10
о
(таб. 6.2).
Для выполнения поворота порядок изменения положения руля
принят следующий:
1.
а)
при ∆К от 20
о
до 60
о
руль в положении 20
о
до того момен-
та, пока математическая модель судна не изменит курс на
½∆К, который соответствует ∆К
1
;
б)
при ∆К от 60
о
до 90
о
руль в положении 20
о
до того момен-
та, пока математическая модель судна не изменит курс на
⅔∆К, которое соответствует ∆К
1
;
величина ∆К
1
внесена в первую колонку второго столбца.
2.
При достижении величины угла поворота ∆К
1
наступает мо-
мент начала перекладки руля в положение 10
о
в сторону пово-
рота. Математическая модель судна продолжает поворот с
этим положением руля до тех пор, пока угол поворота не дос-
тигнет величины, которая на 10
о
менее заданного. На этот мо-
мент угол поворота равен ∆К
1
+ ∆К
2
и величина его внесена в
первую колонку третьего столбца.
3.
а)
Когда до величины заданного угла поворота остается 10
о
наступает момент начала перекладки руля в положение
«прямо»; математическая модель судна продолжает пово-
36
рот с этим положением руля до тех пор, пока не достигнет
величины заданного угла поворота. На этот момент угол
поворота равен ∆К
1
+∆К
2
+∆К
3
=∆К и величина его внесена в
первую колонку четвертого столбца;
б)
Когда до величины заданного угла поворота остается 10
о
наступает момент начала перекладки руля в положение
«прямо»; математическая модель судна продолжает пово-
рот с этим положением руля до тех пор, пока не достигнет
величины, которая на 5
о
менее заданного. На этот момент
угол поворота равен ∆К
1
+∆К
2
+∆К
3
и величина его внесена
в первую колонку четвертого столбца.
4.
а)
Когда до величины заданного угла поворота остается 5
о
,
руль перекладывается в положение 5
о
противоположного
борта; математическая модель судна продолжает поворот с
этим положением руля до тех пор, пока не достигнет вели-
чины заданного угла поворота или скорость поворота при-
близится к нулевой отметке. На этот момент угол поворота
равен ∆К
1
+∆К
2
+∆К
3
+∆К
4
, и величина его внесена в первую
колонку пятого столбца;
б)
Когда до величины заданного угла поворота остается 10
о
,
руль перекладывается на 5
о
противоположного борта; ма-
тематическая модель судна продолжает поворот до тех
пор, пока не достигнет величины заданного угла поворота
или скорость поворота не достигнет нуля. На этот момент
угол поворота равен ∆К
1
+∆К
2
+∆К
4
, и величина его внесе-
на в первую колонку пятого столбца.
На каждый момент изменения положения руля сняты показания
параметров движения.
К построенной циркуляции с перекладкой руля 20
о
проведены ка-
сательные под углом равным каждому ∆К к линии первоначального
движения. Затем построены по три траектории движения математиче-
ской модели судна с выходом на заданный курс, сняты отстояния ко-
нечных точек поворотов по нормали к своей касательной. Полученные
величины внесены в таблицу 6.2.
Затем для оценки точности поворота и выхода на новый курс ме-
тодом касательных использована математическая модель танкера со
следующими данными:
водоизмещение
длина
77100 т,
242.8 м,
37
ширина
осадка носом
осадка кормой
32.2 м,
12.5 м,
12.5 м.
Вначале выполнена циркуляция с перекладкой руля 20
о
, данные по
движению фиксировались каждые 5
о
. Построена траектория движе-
ния. Для выполнения поворотов ∆К (угол поворота) разложен на со-
ставляющие, каждой из которой соответствует свой угол перекладки
руля для выхода математической модели танкера на заданный курс. В
общем случае ∆К будет равен:
∆К = ∆К
1
+ ∆К
2
+ ∆К
3
+ ∆К
4
,
где
∆К -
расчетный угол поворота;
∆К
1
-
часть поворота, выполненная с рулем в положении 20
о
(при ∆К от 20
о
до 60
о
до того момента пока математи-
ческая модель судна не изменит курс на ½∆К; при ∆К от
60
о
до 90
о
до того момента пока математическая мо-
дель судна не изменит курс на ⅔∆К);
∆К
2
-
часть поворота, выполненная с рулем в положении 10
о
(до
того момента пока угол поворота не достигнет величи-
ны, которая на 10
о
менее расчетного);
∆К
3
-
часть поворота (10
о
), выполненная с рулем в положении
10
о
противоположного повороту борта (оставшаяся
часть поворота до величины расчетного угла; при дос-
тижении величины расчетного угла движение останов-
лено, сняты данные);
∆К
4
-
часть поворота (10
о
), выполненная с рулем в положении
15
о
противоположного повороту борта (пока оставшаяся
часть поворота не достигнет величины расчетного угла;
при достижении величины расчетного угла или при ско-
рости поворота равном нулю движение остановлено,
сняты данные);
Порядок начала изменения положения руля такой же, как и на
предыдущей модели.
К построенной циркуляции с перекладкой руля 20
о
проведены ка-
сательные под углом равным каждому ∆К к линии первоначального
движения. Затем построены по две траектории движения математиче-
ской модели судна с выходом на заданный курс, сняты отстояния ко-
нечных точек поворотов по нормали к своей касательной. Полученные
величины внесены в таблицу 6.3.
36
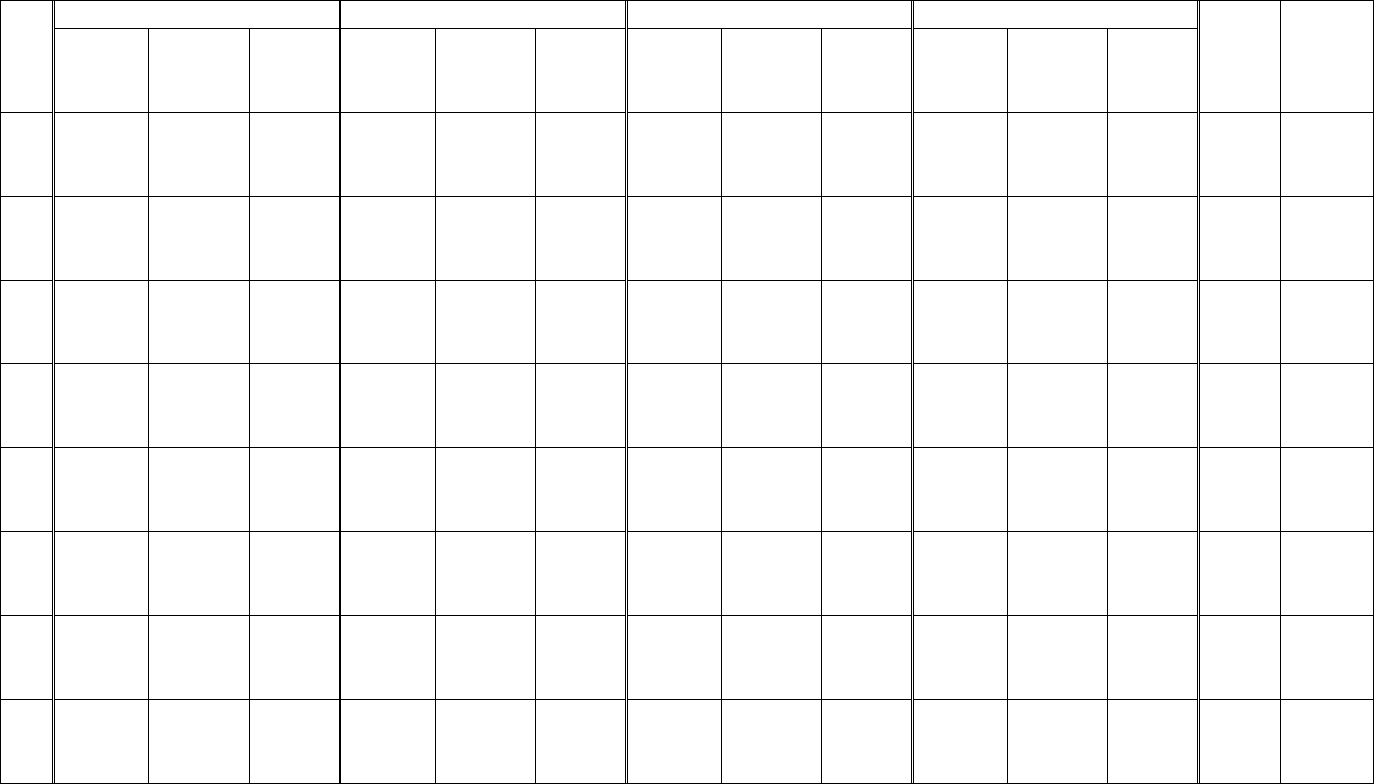
Таблица 6.2
Изменение параметров движения мат. модели балкера при повороте
∆К
∆К
1
∆К
1
+∆К
2
∆К
1
+∆К
2
+∆К
3
∆К
1
+∆К
2
+∆К
3
+∆К
4
Отст.
т-ки
от
касат.
Т-ка
касан.
на
траект.
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
20
о
10.2
10.6
10.6
10.10
09.99
09.99
28.4
28.7
28.7
--
--
--
--
--
--
--
--
--
20.2
15.3
--
9.70
9.82
--
13.7
18.5
--
--
20.1
20.0
--
9.72
9.74
--
6.8
4.1
-3.0
2.0
4.0
32.7
о
30
о
15.6
15.1
15.6
09.76
09.76
09.76
30.9
30.8
30.9
20.4
20.3
20.3
9.56
9.56
9.56
26.1
25.7
25.9
30.3
25.1
--
10.31
9.41
--
13.9
17.3
--
--
30.0
30.0
--
9.35
9.41
--
8.2
6.0
-4.0
2.0
3.8
44.5
о
40
о
20.3
20.3
20.3
09.52
09.52
09.52
31.7
31.7
31.7
30.1
30.1
30.1
9.14
9.14
9.14
24.4
24.4
24.4
40.2
35.1
--
8.98
9.00
--
13.4
16.7
--
--
40.0
40.0
--
8.02
9.12
--
7.7
4.7
3.0
2.0
5.0
52.5
о
50
о
25.1
25.1
25.6
09.29
09.29
09.27
31.7
31.7
31.7
40.0
40.5
40.2
8.77
8.76
8.75
23.5
23.5
23.6
50.4
45.0
--
8.73
8.67
--
12.6
16.3
--
--
50.1
50.0
--
8.77
8.91
--
6.8
2.2
5.0
8.0
16.0
63.5
о
60
о
30.4
30.4
30.4
09.04
09.04
00.04
31.3
31.3
31.3
51.2
50.4
50.1
8.46
8.46
8.48
22.7
22.8
22.8
60.2
55.3о
--
8.48
8.44
--
12.6
15.2
--
--
60.0
59.6
--
8.59
8.86
--
5.8
-0.1
8.0
8.0
12.0
73.0
о
70
о
47.7
47.7
47.7
08.32
08.32
08.32
29.9
29.9
29.9
60.3
60.3
60.3
8.05
8.05
8.05
22.5
22.5
22.5
70.0
о
65.0
--
8.20
8.05
--
10.8
14.5
--
--
70.0
69.5
--
8.32
8.59
--
4.8
-0.1
10.0
13.0
20.0
83.5
о
80
о
53.1
53.6
54.4
08.13
08.11
08.09
29.5
29.5
29.5
70.4
70.2
70.1
7.85
7.85
7.85
22.0
22.0
22.0
80.0
75.1
--
8.07
7.89
--
11.6
14.4
--
--
80.0
78.9
--
8.26
8.48
--
3.6
-0.1
11.0
16.0
24.0
93.0
о
90
о
60.0
60.0
60.0
07.91
07.91
07.91
29.2
29.2
29.2
80.2
80.3
80.2
7.72
7.72
7.72
21.6
21.6
21.6
90.1
85.1
--
7.99
7.78
--
9.7
14.1
--
--
90.0
88.6
--
8.20
8.33
--
2.9
-0.1
14.0
20.0
26.0
102.0
о
37
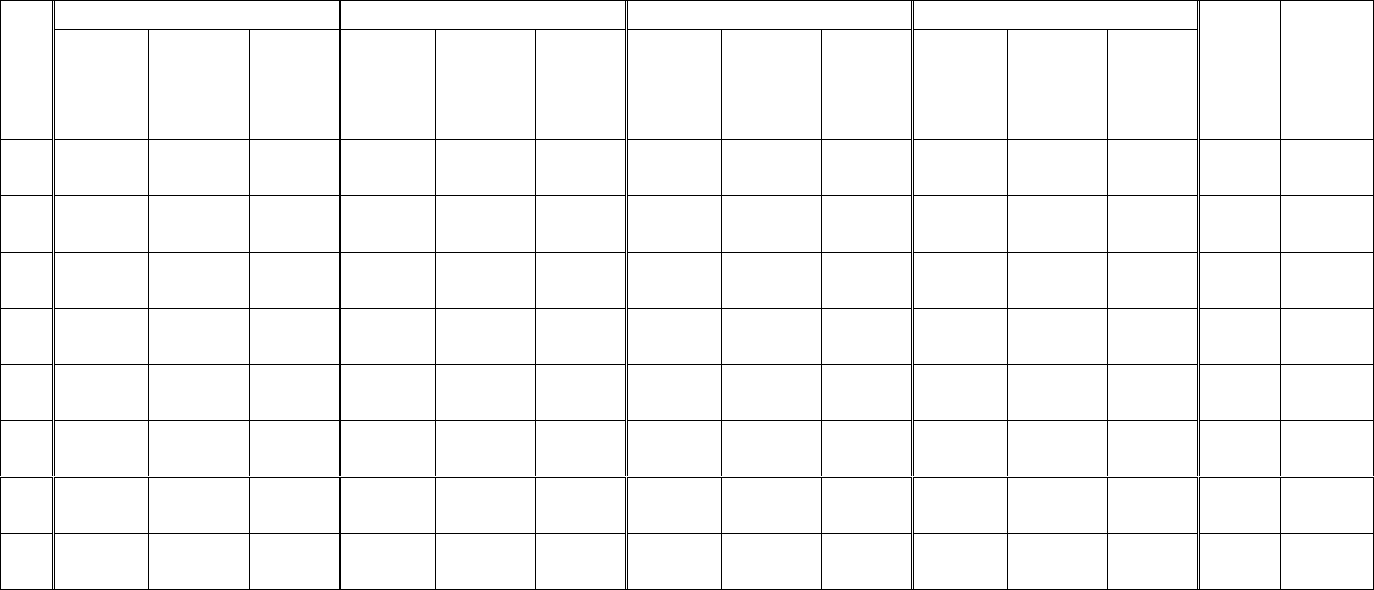
Таблица 6.3
Изменение параметров движения мат. модели танкера при повороте
∆К
∆К
1
∆К
1
+∆К
2
∆К
1
+∆К
2
+∆К
3
∆К
1
+∆К
2
+∆К
3
+∆К
4
Отст.
т-ки
от
касат.
м
Т-ка
касан.
на
траект.
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
20
о
10.2
10.2
13.35
13.35
17.4
17.4
--
--
--
--
--
--
20.0
--
13.06
--
3.2
--
--
18.0
--
13.80
--
-0.1
10.0
10.0
31.0
о
30
о
15.2
15.2
13.12
13.12
19.8
19.8
20.0
20.0
12.91
12.91
18.2
18.2
30.0
--
12.63
--
5.7
--
--
28.5
--
12.69
--
-0.1
08.0
18.0
40.5
о
40
о
20.0
20.0
12.89
12.89
21.2
21.2
30.0
30.0
12.42
12.42
18.6
18.6
40.0
--
12.21
--
7.0
--
--
39.3
--
12.30
--
-0.1
08.0
22.0
51.0
о
50
о
25.1
25.1
12.63
12.63
22.0
22.0
40.0
40.1
11.95
11.97
18.6
18.6
50.0
--
11.82
--
6.3
--
--
49.5
--
11.95
--
-0.1
14.0
28.0
62.5
о
60
о
30.3
30.1
12.36
12.36
22.5
22.5
50.1
50.2
11.57
11.55
18.4
18.4
60.0
--
11.49
--
7.1
--
--
59.6
--
11.64
--
-0.2
16.0
28.0
71.0
о
70
о
46.3
46.3
11.53
11.53
23.1
23.1
60.1
60.1
11.02
11.02
18.7
18.7
70.0
--
10.98
--
7.7
--
--
70.0
--
11.14
--
2.2
16.0
16.0
81.0
о
80
о
53.2
53.6
11.22
11.20
23.0
23.0
70.2
70.0
10.67
10.67
18.1
18.2
80.0
--
10.73
--
6.5
--
--
79.6
--
10.96
--
0.0
16.0
24.0
93.0
о
90
о
60.1
60.3
10.90
10.89
22.8
22.8
80.1
80.0
10.36
10.38
17.6
17.6
90.1
--
10.57
--
5.5
--
--
89.2
--
10.77
--
-0.2
20.0
32.0
102.0
о
38
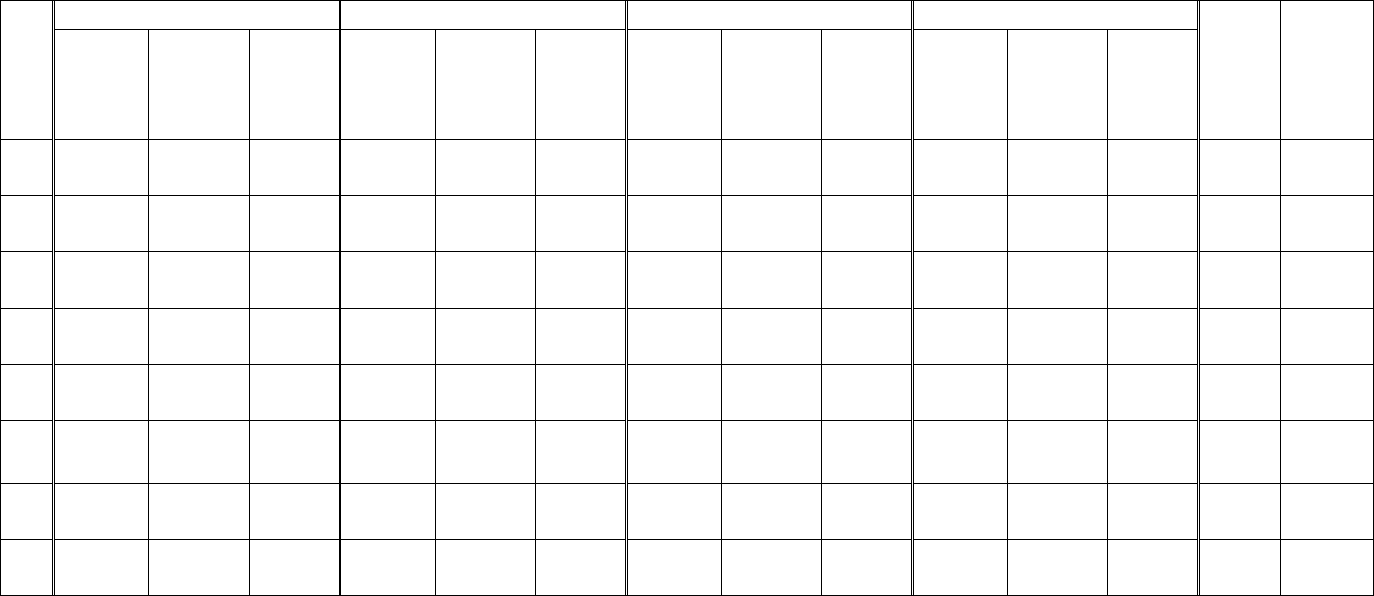
Таблица 6.4
Изменение параметров движения мат. модели RO - RO при повороте
∆К
∆К
1
∆К
1
+∆К
2
∆К
1
+∆К
2
+∆К
3
∆К
1
+∆К
2
+∆К
3
+∆К
4
Отст.
т-ки
от
касат.
м
Т-ка
касан.
на
траект.
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
Измен.
курса,
градус.
Линейн
скор.
узлы
Скор.
повор.
гр/мин
20
о
10.1
10.1
12.15
12.15
25.7
25.7
--
--
--
--
--
--
20.2
--
11.88
--
12.6
--
--
20.1
--
11.89
--
8.6
-2.0
-2.0
29.0
30
о
15.2
15.2
11.94
11.94
29.9
29.9
--
--
--
--
--
--
30.1
--
11.60
--
8.6
--
--
28.8
--
11.59
--
-0.6
2.0
4.0
40.0
40
о
20.4
20.4
11.70
11.70
33.0
33.0
25.4
25.4
11.53
11.53
32.2
32.2
40.1
--
11.29
--
8.6
--
--
38.3
--
11.29
--
0.0
5.0
8.0
51.0
50
о
25.0
25.6
11.57
11.57
35.0
35.2
35.2
35.2
11.16
11.14
32.7
32.7
50.1
--
10.98
--
9.4
--
--
49.2
--
11.00
--
-0.3
8.0
10.0
60.0
60
о
30.4
30.4
11.27
11.27
36.7
36.7
45.4
45.4
10.79
10.79
32.8
32.8
60.3
--
10.69
--
10.1
--
--
59.5
--
10.97
--
-0.8
7.0
12.0
70.0
70
о
35.4
35.4
11.06
11.06
37.9
37.9
55.6
55.1
10.46
10.48
32.3
32.4
70.0
--
10.44
--
10.8
--
--
69.0
--
10.54
--
-0.3
14.0
16.0
80.0
80
о
53.6
53.0
10.32
10.34
39.6
39.6
65.3
65.3
9.99
10.01
34.5
34.4
80.2
--
9.99
--
12.1
--
--
80.0
--
10.09
--
3.2
4.0
9.0
92.5
90
о
60.2
60.2
10.09
10.09
39.5
39.5
75.1
75.2
9.74
9.72
33.2
33.2
90.2
--
9.84
--
11.7
--
--
90.0
--
9.91
--
3.3
6.0
6.0
102.5
39
Порядок начала изменения положения руля такой же, как и на
предыдущей модели.
К построенной циркуляции с перекладкой руля 20
о
проведены ка-
сательные под углом равным каждому ∆К к линии первоначального
движения. Затем построены по две траектории движения математиче-
ской модели судна с выходом на заданный курс, сняты отстояния ко-
нечных точек поворотов по нормали к своей касательной. Полученные
величины внесены в таблицу 6.3.
Далее для оценки точности поворота и выхода на новый курс ме-
тодом касательных использована математическая модель RO-RO со
следующими данными:
водоизмещение
длина
ширина
осадка носом
осадка кормой
25400 т,
184.2 м,
30.6 м,
8.2 м,
8.2 м.
Вначале выполнена циркуляция с перекладкой руля 20
о
, данные по
движению фиксировались каждые 5
о
. Построена траектория движе-
ния. Для выполнения поворотов ∆К (угол поворота) разложен на со-
ставляющие, каждой из которой соответствует свой угол перекладки
руля для выхода математической модели танкера на заданный курс. В
общем случае ∆К будет равен:
∆К = ∆К
1
+ ∆К
2
+ ∆К
3
+ ∆К
4
,
где
∆К -
расчетный угол поворота;
∆К
1
-
часть поворота, выполненная с рулем в положении 20
о
(при ∆К от 20
о
до 60
о
до того момента пока математи-
ческая модель судна не изменит курс на ½∆К; при ∆К от
60
о
до 90
о
до того момента пока математическая мо-
дель судна не изменит курс на ⅔∆К);
∆К
2
-
часть поворота, выполненная с рулем в положении 10
о
(до
того момента пока угол поворота не достигнет величи-
ны, которая на 15
о
менее расчетного);
∆К
3
-
часть поворота (15
о
), выполненная с рулем в положении
10
о
противоположного повороту борта (оставшаяся
часть поворота до величины расчетного угла; при дос-
тижении величины расчетного угла движение останов-
40
лено, сняты данные);
∆К
4
-
часть поворота (15
о
), выполненная с рулем в положении
15
о
противоположного повороту борта (оставшаяся
часть поворота до величины расчетного угла; при дос-
тижении величины расчетного угла или при скорости
поворота равном нулю движение остановлено, сняты
данные);
К построенной циркуляции с перекладкой руля 20
о
проведены ка-
сательные под углом, равным каждому ∆К к линии первоначального
движения. Затем построены по две траектории движения математиче-
ской модели судна с выходом на заданный курс, сняты отстояния ко-
нечных точек поворотов по нормали к своей касательной. Полученные
величины внесены в таблицу 6.4.
Таким образом, для оценки точности выхода на курс использова-
ны три математические модели. Следует обратить внимание на то, что
только заключительная часть поворота отличается углом перекладки
руля. Необходимость в этом возникает, чтобы «погасить» скорость
поворота.
Водоизмещение танкера больше водоизмещения балкера в 2,3
раза, поэтому для танкера силы и моменты, вызывающие изменение
курса судна при перекладке руля, должны быть больше.
У математической модели RO-RO при перекладке руля на 20
о
воз-
никает большая скорость поворота, которую необходимо «погасить» к
моменту выхода на заданный курс. По этой причине перекладка руля
на борт противоположный повороту начиналась при курсе, который
менее заданного на 15
о
.
У математических моделей танкера и RO-RO в первом случае, а у
балкера во втором случае, движение останавливалось в момент, когда
курс модели достигал заданного, чтобы снять данные. Но на всех мо-
делях при продолжении поворота с тем же положением руля курс мо-
делей не превышал 3,5
о
более заданного угла поворота в тот момент,
когда скорость поворота падала до нуля.
В тот момент, когда скорость поворота падает до нуля, математи-
ческим моделям судов необходимо возвращаться на заданный курс.
При этом действие возврата не увеличивает расстояния по нормали до
касательной.
У математических моделей танкера и RO-RO во втором случае, а у
балкера в третьем случае движение останавливалось в основном в мо-
мент, когда скорость поворота падала до нуля, а судно еще не достиг-
ло заданного курса. Т. е. силы и моменты, вызывающие изменение