Драчев В.Н. Учет циркуляции при плавании в стесненных районах
Подождите немного. Документ загружается.


13
быстроходные катамараны, оборудованные газовыми турбина-
ми, фиксированным шагом винта, подруливающим, эффектом
удерживания судна грунтом при соприкосновении;
быстроходные катера, оборудованные дизельной или газовой
турбиной, фиксированным шагом винта или водометом, рулями
различного типа, подруливающим, эффектом удерживания суд-
на грунтом при соприкосновении;
буксиры, оборудованные дизелями, фиксированным или регу-
лируемым шагом винта, управлением насадками, подруливаю-
щим и буксирным устройством и эффектом удерживания судна
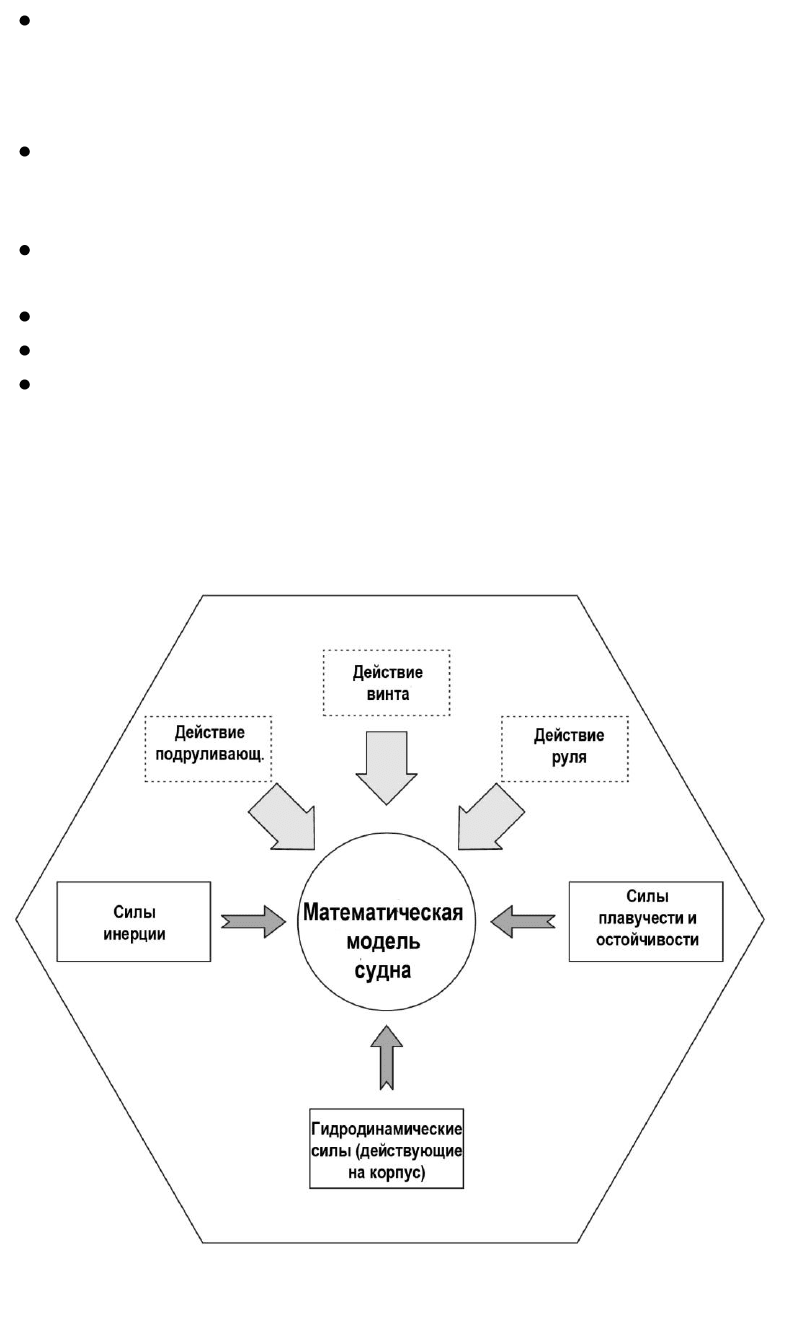
Рис. 2.1. Судно, как контролируемая система
14
грунтом при соприкосновении;
несамоходные баржи, оборудованные эффектом удерживания
судна грунтом при соприкосновении.
Набор математических моделей, оборудование рейда и окружаю-
щая обстановка включают:
судно-цель – судно с автоматическим регулируемым движением
и заданным маршрутом. Любое упомянутое выше судно может
быть использовано как судно цель;
автоматически контролируемые буксиры – любой буксир в ав-
томатическом режиме под контролем оператора;
швартовые буи;
модель «человек за бортом»;
математическую модель колебания поверхности моря и т. д.
При проектировании математическое судно рассматривается как
контролируемая система. Она включает сам контролируемый объект и
систему контроля. Это обеспечивает движение судна в стесненных
водах. На рис. 2.1 показано судно как контролируемая система.
Рис. 2.2. Силы, действующие на судно в штиль на глубокой воде
15
Устройство управления включает винт, руль, якорь, систему
швартовки и т.д., заставляющую действовать силы на корпус судна,
находящиеся в прямой зависимости от сил, величина которых контро-
лируется. Контрольное значение устанавливается на величину, обес-
печивающую управляемое движение судна.
Движение судна может быть описано с воздействием или без воз-
действия внешних сил.
Внешние силы – это силы, возникающие от действия ветра, тече-
ния, волнения, геометрии канала (действие мелководья, эффект бере-
га в каналах, наклонение дна и т. д.), присутствия других объектов
(движущихся или неподвижных).
Описание движения судна в штиль на глубокой воде является ос-
нованием математической модели. Структура сил воздействия на суд-
но показана на рис. 2.2.
Инерционные, гидродинамические и гидростатические силы яв-
ляются теми силами, которые определяют движение судна в штиль на
глубокой воде. Поэтому эти силы названы базовыми.
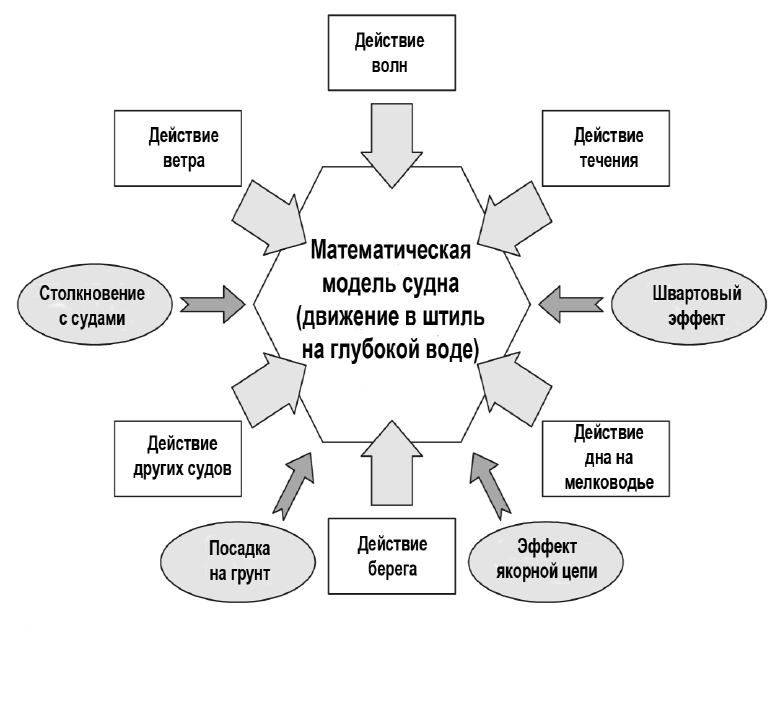
Рис. 2.3. Внешние силы

16
Внешние силы рассматриваются как дополнительное значение к
базовым и делятся на две группы:
1. аэродинамические и гидроакустические силы;
2. механические силы.
Первая группа включает силы, которые возникают от действия
ветра, течения, волнения, взаимодействия с другими объектами, гид-
родинамических сил при плавании на мелководье и т. д.
Вторая группа содержит силы, которые возникают в результате
соприкосновения с землей, стеной, другими судами, якорной цепью и
т. д.
Структура внешних сил показана на рис. 2.3.
Движение математической модели судна основано на наборе не-
линейных дифференциальных уравнений с использованием набора
решений по формулам для установления кинематических параметров
движения судна, т.е. координаты центра тяжести судна (X
g
, Y
g
, Z
g
),
углы отклонения (угол крена θ, дифферента ψ, курса φ) и соответст-
вующих значений скорости и ускорения.
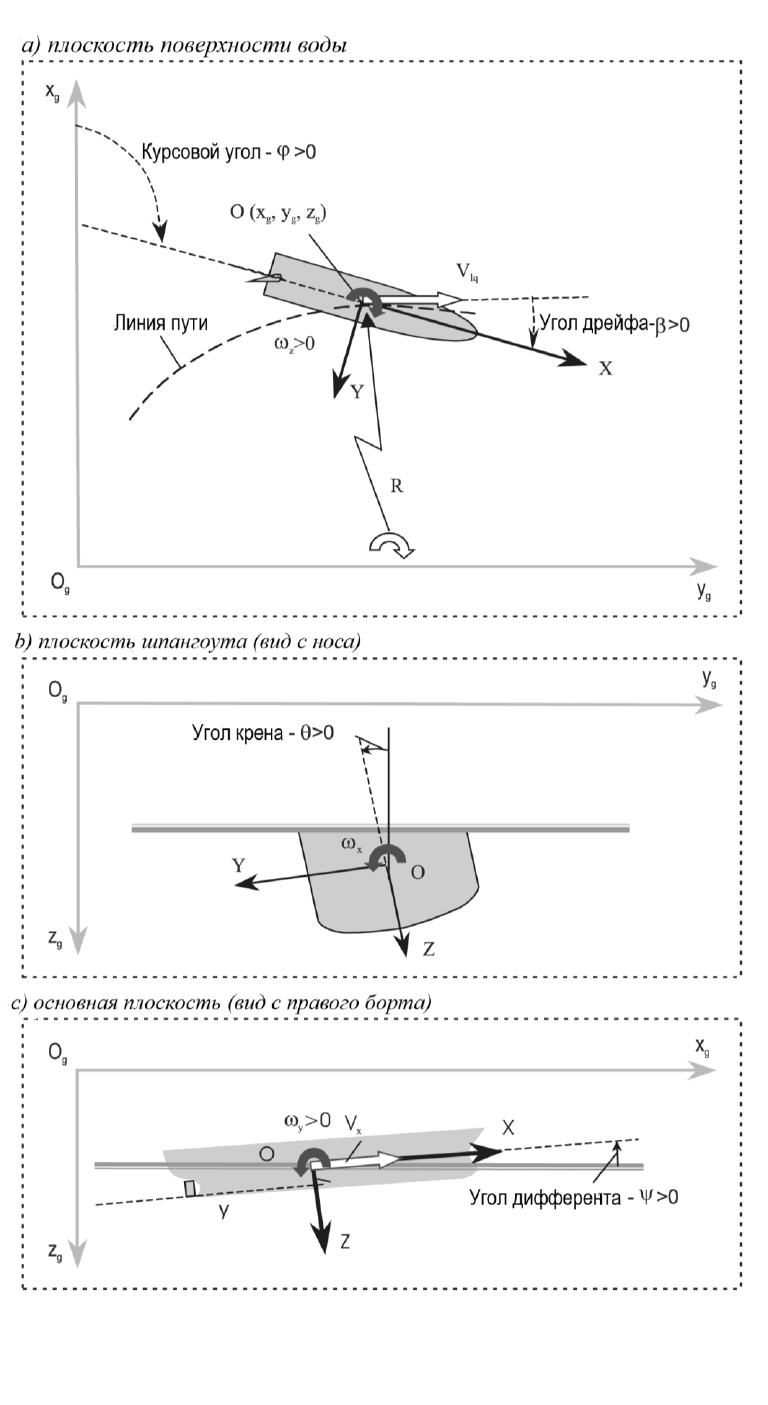
Использованы две координатные системы:
основные оси (X
g
, Y
g
, Z
g
) в прямоугольной системе услов-
но установлены относительно Земли;
оси (X, Y, Z) в прямоугольной системе условно привязаны
к судну (см. рис. 2.4). Начало закрепленных осей лежит в уста-
новленной точке O
g
.
Оси O
g
X
g
и O
g
Y
g
лежат в плоскости параллельно к свободной
штилевой поверхности воды, а ось O
g
Z
g
– перпендикулярно к ней.
Они имеют следующее направление:
ось O
g
X
g
направлена на полюс;
ось O
g
Y
g
направлена на восток;
ось O
g
Z
g
направлена вниз.
Оси O
g
X
g
и O
g
Y
g
лежат в плоскости параллельно к свободной
штилевой поверхности воды, а ось O
g
Z
g
– перпендикулярно к ней.
Они имеют следующее направление:
ось O
g
X
g
направлена на полюс;
ось O
g
Y
g
направлена на восток;
ось O
g
Z
g
направлена вниз.
Начало собственных осей судна в центре тяжести судна. Оси OX и
OY параллельны к основной плоскости, ось OZ перпендикулярна к
ней. Оси направлены следующим образом:
17
Рис. 2.4. Системы координат

18
Ось OX – вперед;
Ось OY – в правый борт;
Ось OZ – прямо вниз.
Углы отклонения судна считаются положительными, когда судно
поворачивается по часовой стрелке, если смотреть из конца вектора.
Начало собственных осей судна в центре тяжести судна. Оси OX и
OY параллельны к основной плоскости, ось OZ перпендикулярна к
ней. Оси направлены следующим образом:
Ось OX – вперед;
Ось OY – в правый борт;
Ось OZ – прямо вниз.
Углы отклонения судна считаются положительными, когда судно
поворачивается по часовой стрелке, если смотреть из конца вектора.
Глава 3. ЦИРКУЛЯЦИЯ СУДНА
Основной характеристикой поворотливости судна длительное
время являлся диаметр установившейся циркуляции. В действитель-
ности фактическая траектория движения судна может значительно от-
личаться от окружности указанного диаметра (рис. 3.1).
За начало циркуляции принимается момент начала перекладки ру-
ля.
Циркуляция характеризуется линейной и угловой скоростями, ра-
диусом кривизны и углом дрейфа. Эти характеристики не остаются
постоянными. Процесс циркуляции принято делить на три периода:
первый период – маневренный, продолжается в течение времени
перекладки руля;
второй период – эволюционный, начинается с момента оконча-
ния перекладки руля и заканчивается, когда характеристики
циркуляции примут установившиеся значения;
третий период – установившийся, начинается с момента окон-
чания второго периода и продолжается до тех пор, пока руль ос-
тается в переложенном положении.
Как видно из рис. 3.1, только после изменения курса на 160 – 180
о
(у некоторых судов и больше) в период так называемой установив-
шейся циркуляции траектория приобретает вид окружности указанно-
го диаметра.
19
В связи с тем, что на практике обычно курс изменяется в меньших
пределах, судоводителя в большей степени интересует поведение суд-
на в первые периоды циркуляции – маневренный и эволюционный.
Именно на этом участке и наблюдаются наиболее значительные раз-
личия действительной траектории циркуляции от окружности. Неко-
торые суда (особенно крупнотоннажные) не реагируют мгновенно на
перекладку руля и определенное время после ее начала продолжают
следовать прежним курсом. Это время называется «мертвым проме-
жутком». Начинается циркуляция с того, что центр тяжести судна не-
сколько смещается от линии первоначального курса в сторону, проти-
воположную повороту, так называемое обратное смещение l
3
, а нос
судна отклоняется внутрь циркуляции, создавая угол дрейфа β.
По мере входа судна в циркуляцию его угловая скорость (ско-
рость изменения курса) постепенно увеличивается, линейная –
уменьшается. Кривая циркуляции в этот период имеет на всем протя-
жении переменный радиус кривизны.
Чем лучше поворотливость судна, т. е. чем большую кривизну
имеет траектория центра тяжести, тем больше снижается скорость на
циркуляции. В среднем на крупнотоннажных морских судах во время
циркуляции с рулем, переложенным на борт при повороте на 90 гра-
дусов, скорость снижается на 1/3, а при повороте на 180 градусов –
вдвое.
При небольших углах перекладки руля снижение скорости на цир-
куляции невелико.
Наиболее типичная траектория судна на циркуляции с рулем, пе-
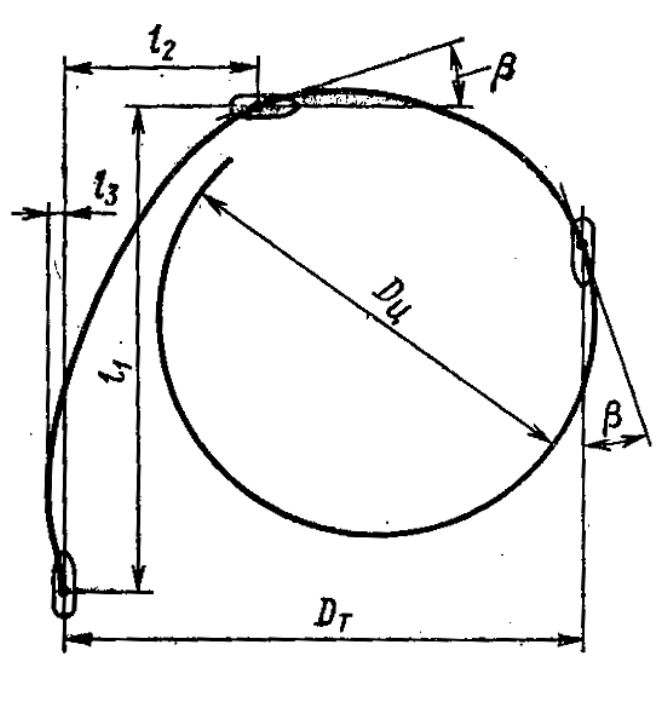
реложенным на борт, показана на рис. 3.1.
Геометрическая траектория характеризуется следующими элемен-
тами циркуляции:
выдвиг (l
1
) – расстояние, на которое смещается ЦТ судна в направ-
лении первоначального курса от точки начала перекладки руля до
точки, соответствующей изменению курса на 90 градусов;
прямое смещение (l
2
) – расстояние от линии первоначального кур-
са по нормали до ЦТ судна к моменту изменения курса на 90 граду-
сов;
обратное смещение (l
3
) – максимальное смещение центра тяжести
судна от линии первоначального курса в сторону, обратную направ-
лению поворота, происходящее в начале циркуляции под влиянием
боковой силы руля, вызывающей дрейф судна (обратное смещение
обычно не превышает ширину судна, а на некоторых судах не наблю-
дается вовсе);
20
тактический диаметр циркуляции (D
T
)– расстояние между поло-
жениями диаметральной плоскости судна до начала поворота и в мо-
мент изменения курса на 180 градусов;
диаметр установившейся циркуляции D
Ц
– расстояние между по-
ложениями диаметральной плоскости судна на двух последователь-
ных курсах, отличающихся на 180 градусов при установившемся дви-
жении;
угол дрейфа (β) – угол между диаметральной плоскостью судна и
вектором окружной скорости его центра тяжести. Под углом дрейфа
на циркуляции подразумевается угол дрейфа центра тяжести судна.
С наступлением установившегося периода циркуляции параметры
движения судна приобретают постоянное значение. Линейная ско-
рость к этому моменту падает на 30 – 40% от своего первоначального
Рис. 3.1. Элементы циркуляции
21
значения. Углы дрейфа имеют величины 10 – 15
о
, у высокоповоротли-
вых судов они могут достигать 20 – 25
о
.
Как показывают исследования механизма циркуляции, сила, воз-
никающая на руле при его пере-
кладке, является первым толчком
к началу поворота. В дальнейшем
поворот осуществляется под воз-
действием комплекса гидродина-
мических сил, возникающих на
корпусе и руле в процессе цирку-
ляции. Вращающие моменты бу-
дут зависеть не только от вели-
чины этих сил, но и точки их
приложения относительно оси
вращения.
Указанные силы являются
функциями скорости, угла нате-
кания потока воды и осадки, точ-
ка их приложения зависит от
формы подводной части судна.
В связи с этим на характери-
стики циркуляции, кроме угла
перекладки руля, будут влиять
скорость, водоизмещение, нали-
чие у судна крена и дифферента.
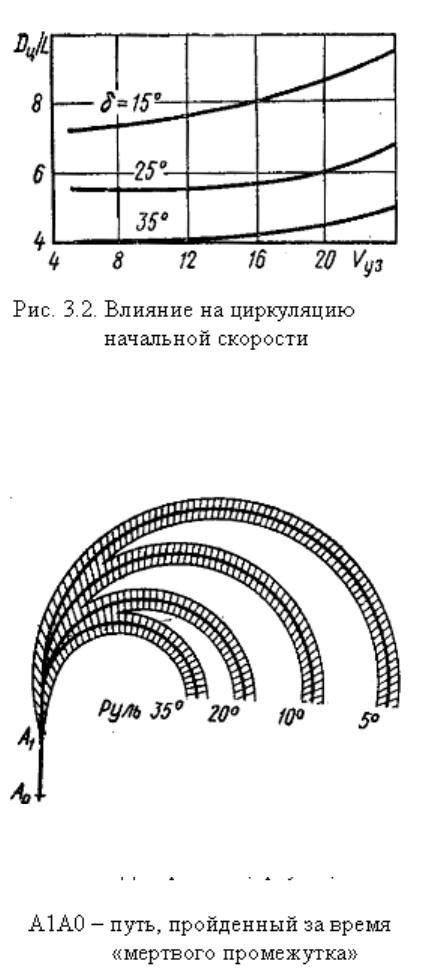
Для судов, полный ход кото-
рых не превышает 16 узлов, на-
чальная скорость оказывает
влияние не столько на диаметр
циркуляции, сколько на ее время
и величину выдвига. Только у
быстроходных судов при скоро-
сти 20 – 24 узла можно заметить
некоторое влияние ее изменения
на диаметр циркуляции (рис. 3.2).
Заметное влияние на характеристики циркуляции оказывают как
водоизмещение судна, так и направление поворота (у одновинтовых
судов). Последнее объясняется появлением боковых сил на винте из-за
А
1
А
0
– путь, пройденный за время
«мертвого промежутка»
22
скорости потока. Как правило, при винте правого вращения диаметр
циркуляции вправо больше, чем влево.
Из изложенного вытекает, что полная информация о поворотливо-
сти судна должна составляться по результатам испытаний, проведен-
ных на нем в грузу и балласте при нескольких углах перекладки руля
(обычно на 10, 15 ÷ 20, 35
о
) на левый и правый борт соответственно.
Проводить испытания целесообразно при одной скорости – маневрен-
ной. Для других скоростей достаточно ограничиться только определе-
нием величины мертвого промежутка.
Информация о поворотливости для судов малого тоннажа может
быть ограничена только сведениями о величине диаметра циркуляции,
времени изменения курса на 180 и 360
о
при различных начальных ус-
ловиях. Для судов среднего тоннажа поворотливость судна целесооб-
разно дополнительно характеризовать таблицей изменения курса (че-
рез каждые 10
о
) по времени.
Оптимальной формой информации о поворотливости крупнотон-
нажных судов следует считать диаграмму циркуляций (рис. 3.3), со-
ставленную для скорости маневренного хода с указанием величин
«мертвого промежутка» на всех скоростях и значений падения на-
чальной скорости в процессе циркуляции.
Глава 4. ВЛИЯНИЕ МЕЛКОВОДЬЯ
НА УПРАВЛЯЕМОСТЬ СУДНА
С точки зрения управления судном понятие узкости определяется
соотношением между маневренными характеристиками судна (с уче-
том его линейных размеров) и шириной водного пространства, в пре-
делах которого судно может безопасно следовать.
С точки зрения ширины акватории делят на открытые и каналы.
Открытые акватории делят на глубокие, мелкие и углубленные
морские пути.
Открытой и глубокой является такая акватория, дно и берега кото-
рой не оказывают влияния на маневренные качества судна. Ширина
открытой акватории определяется диаметром циркуляции. В практике
принимается, что для выполнения самостоятельной циркуляции на ак-
ватории, где нет ветра и течения, необходимы размеры акватории,
равные
b > 8L,