Dougherty С. Introduction to Econometrics, 3Ed
Подождите немного. Документ загружается.


MODELS USING TIME SERIES DATA
3
aggregate data for the whole of the United States and that kind of interpretation is not sensible.
It is common to hypothesize that a constant elasticity function of the type
vPRELHOUSDPIHOUS
3
2
1
ββ
β
=
(12.2)
is mathematically more appropriate for demand functions. Linearizing it by taking logarithms, one
obtains
LGHOUS =
β
1
' +
β
2
LGDPI +
β
3
LGPRHOUS + u, (12.3)
where LGHOUS, LGDPI and LGPRHOUS are the (natural) logarithms of HOUS, DPI and
PRELHOUS, respectively, u is the natural logarithm of the disturbance term v,
β
1
' is the logarithm of
β
1
, and
β
2
and
β
3
are income and price elasticities. The regression result is now as shown:
=============================================================
Dependent Variable: LGHOUS
Method: Least Squares
Sample: 1959 1994
Included observations: 36
=============================================================
Variable Coefficient Std. Error t-Statistic Prob.
=============================================================
C -2.032685 0.322726 -6.298478 0.0000
LGDPI 1.132248 0.008705 130.0650 0.0000
LGPRHOUS -0.227634 0.065841 -3.457323 0.0015
=============================================================
R-squared 0.998154 Mean dependent var 5.996930
Adjusted R-squared 0.998042 S.D. dependent var 0.377702
S.E. of regression 0.016714 Akaike info criter -8.103399
Sum squared resid 0.009218 Schwarz criterion -7.971439
Log likelihood 97.77939 F-statistic 8920.496
Durbin-Watson stat 0.846451 Prob(F-statistic) 0.000000
=============================================================
The coefficients of LGDPI and LGPRHOUS are direct estimates of the income and price
elasticities. Is 1.13 a plausible income elasticity? Probably. It is conventional to classify consumer
expenditure into normal goods and inferior goods, types of expenditure whose income elasticities are
positive and negative, respectively, and to subdivide normal goods into necessities and luxuries, types
of expenditure whose income elasticities are less than 1 and greater than 1. Housing is obviously a
necessity, so you might expect the elasticity to be positive but less than 1. However it also has a
luxury element, since people spend more on better quality housing as their income rises. Overall the
elasticity seems to work out at about 1, so the present estimate seems reasonable.
Exercises
12.1
The results of linear and logarithmic regressions of consumer expenditure on food, FOOD, on
DPI and a relative price index series for food, PRELFOOD, using the Demand Functions data
set, are summarized below. Provide an economic interpretation of the coefficients and perform
appropriate statistical tests.

MODELS USING TIME SERIES DATA
4
ODOF
ˆ
= 232.6 + 0.089 DPI – 0.534 PRELFOOD R
2
= 0.989
(31.9) (0.002) (0.332)
OODFLG
ˆ
= 2.66 + 0.61 LGDPI – 0.30 LGPRFOOD R
2
= 0.993
(0.28) (0.01) (0.07)
12.2
Download the Demand Functions data set and associated manuals from the website. You should
choose, or be assigned by your instructor, one category of expenditure, and it may be helpful to
simplify the data set by deleting the expenditure and price variables relating to the other
categories.
Construct a relative price index series for your category as indicated in Section 1 of
the Demand Functions Regression Exercises manual. Plot the series and try to explain why it
has changed over the time period.
12.3
Regress your category of expenditure on DPI and the relative price index series constructed in
Exercise 12.1. Give an economic interpretation of the regression coefficients and perform
appropriate statistical tests.
12.4
Regress the logarithm of expenditure on your category on LGDPI and the logarithm of the
relative price series. Give an economic interpretation of the regression coefficients and perform
appropriate statistical tests.
12.5*
Perform a Box–Cox test to determine whether there is a significant difference in the fit of the
linear and logarithmic regressions for your category of expenditure.
12.6
Sometimes a time trend is included in a regression as an explanatory variable, acting as a proxy
for some gradual change not associated with income or price. Changing tastes might be an
example. However, in the present case the addition of a time trend might give rise to a problem
of multicollinearity because it will be highly correlated with the income series and perhaps also
the price series. Calculate the correlations between the TIME variable in the data set, LGDPI,
and the logarithm of expenditure on your category. Regress the logarithm of expenditure on
your category on LGDPI, the logarithm of the relative price series, and TIME (not the logarithm
of TIME). Provide an interpretation of the regression coefficients, perform appropriate
statistical tests, and compare the regression results with those of the same regression without
TIME.
12.2 Dynamic Models
Next, we will introduce some simple dynamics. One might suppose that some types of consumer
expenditure are largely determined by current income and price, but this is not so for a category such
as housing that is subject to substantial inertia. We will consider specifications in which expenditure
on housing depends on lagged values of income and price. A variable X lagged one time period has
values that are simply the previous values of X, and it is conventionally referred to as X(–1).
Generalizing, a variable lagged s time periods has the X values s periods previously, and is denoted
X(–s). Major regression applications adopt this convention and for these there is no need to define
lagged variables separately. Table 12.1 shows the data for LGDPI, LGDPI(–1) and LGDPI(–2).
MODELS USING TIME SERIES DATA
5
T
ABLE
12.1
Current and Lagged Values of the
Logarithm of Disposable Personal Income
Year LGDPI LGDPI(–1) LGDPI(–2)
1959 5.2750 - -
1960 5.3259 5.2750 -
1961 5.3720 5.3259 5.2750
1962 5.4267 5.3720 5.3259
1963 5.4719 5.4267 5.3720
1964 5.5175 5.4719 5.4267
1965 5.5706 5.5175 5.4719
...... ...... ...... ......
...... ...... ...... ......
1987 6.3689 6.3377 6.3119
1988 6.3984 6.3689 6.3377
1989 6.4210 6.3984 6.3689
1990 6.4413 6.4210 6.3984
1991 6.4539 6.4413 6.4210
1992 6.4720 6.4539 6.4413
`1993 6.4846 6.4720 6.4539
1994 6.5046 6.4846 6.4720
T
ABLE
12.2
Alternative Dynamic Specifications, Expenditure on Housing Services
Variable (1) (2) (3) (4) (5)
LGDPI 1.13
(0.01)
--
0.38
(0.15)
0.33
(0.14)
LGDPI(–1)
-
1.10
(0.01)
-
0.73
(0.15)
0.28
(0.21)
LGDPI(–2)
--
1.07
(0.01)
-
0.48
(0.15)
LGPRHOUS –0.23
(0.07)
--
–0.19
(0.08)
–0.13
(0.19)
LGPRHOUS(–1)
-
–0.20
(0.06)
-
0.14
(0.08)
0.25
(0.33)
LGPRHOUS(–2)
--
–0.19
(0.06)
-
–0.33
(0.19)
R
2
0.998 0.999 0.998 0.999 0.999

MODELS USING TIME SERIES DATA
6
Note that obviously there is a very high correlation between LGDPI, LGDPI(–1) and LGDPI(–2), and
this is going to cause problems.
The first column of Table 12.2 presents the results of a logarithmic regression using current
income and price. The second and third columns show the results of regressing expenditure on
housing on income and price lagged one and two time periods, respectively. It is reasonable to
hypothesize that expenditure on a category of consumer expenditure might depend on both current and
lagged income and price. The fourth column shows the results of a regression using current income
and price and the same variables lagged one time period. The fifth column adds the same variables
lagged two time periods, as well.
The first three regressions are almost identical. This is because LGDPI, LGDPI(–1) and
LGDPI(–2) are very highly correlated. The last two regressions display the classic symptoms of
multicollinearity. The point estimates are unstable and the standard errors become much larger when
current and lagged values of income and price are included as regressors. For a type of expenditure
like housing, where one might expect long lags, this is clearly not a constructive approach to
determining the lag structure.
A common solution to the problem of multicollinearity is to hypothesize that the dynamic process
has a parsimonious lag structure, that is, a lag structure that can be characterized with few parameters.
One of the most popular lag structures is the Koyck distribution, which assumes that the coefficients
of the explanatory variables have geometrically declining weights. We will look at two such models,
the adaptive expectations model and the partial adjustment model.
Exercises
12.7
Give an economic interpretation of the coefficients of LGDPI, LGDPI(–1), and LGDPI(–2), in
column 5 of Table 12.2.
12.8
To allow for the possibility that expenditure on your category is partly subject to a one-period
lag, regress the logarithm of expenditure on your commodity on LGDPI, the logarithm of your
relative price series, and those two variables lagged one period. Repeat the experiment adding
LGDPI(–2) and the logarithm of the price series lagged two periods. Compare the regression
results, paying attention to the changes in the regression coefficients and their standard errors.
12.3 The Adaptive Expectations Model
The modeling of expectations is frequently an important and difficult task of the applied
economist using time series data. This is especially true in macroeconomics, in that investment,
saving, and the demand for assets are all sensitive to expectations about the future. Unfortunately,
there is no satisfactory way of measuring expectations directly for macroeconomic purposes.
Consequently, macroeconomic models tend not to give particularly accurate forecasts, and this make
economic management difficult.
As a makeshift solution, some models use an indirect technique known as the adaptive
expectations process. This involves a simple learning process in which, in each time period, the actual
value of the variable is compared with the value that had been expected. If the actual value is greater,

MODELS USING TIME SERIES DATA
7
the expected value is adjusted upwards for the next period. If it is lower, the expected value is
adjusted downwards. The size of the adjustment is hypothesized to be proportional to the discrepancy
between the actual and expected value.
If X is the variable in question, and
e
t
X is the value expected in time period t given the
information available at time period t–1,
)(
1
e
tt
e
t
e
t
XXXX
−=−
+
λ
(0
≤
λ
≤
1) (12.4)
This can be rewritten
e
tt
e
t
XXX )1(
1
λλ
−+=
+
,(0
≤
λ
≤
1) (12.5)
which states that the expected value of X in the next time period is a weighted average of the actual
value of X in the current time period and the value that had been expected. The larger the value of
λ
,
the quicker the expected value adjusts to previous actual outcomes.
For example, suppose that you hypothesize that a dependent variable, Y
t
, is related to the expected
value of the explanatory variable, X, in year t+1,
e
t
X
1
+
:
t
e
tt
uXY
++=
+
121
β
β
. (12.6)
(12.6) expresses Y
t
in terms of
e
t
X
1
+
, which is unobservable and must somehow be replaced by
observable variables, that is, by actual current and lagged values of X, and perhaps lagged values of Y.
We start by substituting for
e
t
X
1
+
using (12.5):
(
)
t
e
tt
t
e
ttt
uXX
uXXY
+−++=
+−++=
)1(
)1(
221
21
λ
β
λ
β
β
λλ
β
β
(12.7)
Of course we still have unobservable variable
e
t
X as an explanatory variable, but if (12.5) is true
for time period t, it is also true for time period t–1:
e
tt
e
t
XXX
11
)1(
−−
−+=
λλ
. (12.8)
Substituting for
e
t
X in (12.7), we now have
t
e
tttt
uXXXY
+−+−++=
−−
1
2
21221
)1()1(
λ
β
λλ
β
λ
β
β
(12.9)
After lagging and substituting s times, the expression becomes
t
e
st
s
st
s
tttt
uXX
XXXY
+−+−+
+−+−++=
+−+−
−
−−
121
1
2
2
2
21221
)1()1(
...)1()1(
λ
β
λλ
β
λλ
β
λλ
β
λ
β
β
(12.10)

MODELS USING TIME SERIES DATA
8
Now it is reasonable to suppose that
λ
lies between 0 and 1, in which case (1 –
λ
) will also lie between
0 and 1. Thus (1 –
λ
)
s
becomes progressively smaller as
s
increases. Eventually there will be a point
where the term
e
st
s
X
12
)1(
+−
−
λ
β
is so small that it can be neglected and we have a model in which all
the variables are observable.
A lag structure with geometrically-declining weights, such as this one, is described as having a
Koyck distribution. As can be seen from (12.10), it is highly parsimonious in terms of its
parameterization, requiring only one parameter more than the static version. Since it is nonlinear in
the parameters, OLS should not be used to fit it, for two reasons. First, multicollinearity would almost
certainly make the estimates of the coefficients so erratic that they would be worthless – it is precisely
this problem that caused us to search for another way of specifying a lag structure. Second, the point
estimates of the coefficients would yield conflicting estimates of the parameters. For example,
suppose that the fitted relationship began
t
Y
ˆ
= 101 + 0.60
X
t
+ 0.45
X
t
–1
+ 0.20
X
t
–2
+ ... (12.11)
Relating the theoretical coefficients of the current and lagged values of
X
in (12.10) to the estimates in
(12.11), one has
b
2
l
= 0.60,
b
2
l
(1 –
l
) = 0.45, and
b
2
l
(1 –
l
)
2
= 0.20. From the first two you could infer
that
b
2
was equal to 2.40 and
l
was equal to 0.25 – but these values would conflict with the third
equation and indeed with the equations for all the remaining coefficients in the regression.
Instead, a nonlinear estimation technique should be used instead. Most major regression
applications have facilities for performing nonlinear regressions built into them. If your application
does not, you could fit the model using a grid search. It is worth describing this technique, despite the
fact that it is obsolete, because it makes it clear that the problem of multicollinearity has been solved.
We rewrite (12.10) as two equations:
Y
t
=
β
1
+
β
2
Z
t
+
u
t
(12.12)
Z
t
=
λ
X
t
+
λ
(1 –
λ
)
X
t
–1
+
λ
(1 –
λ
)
2
X
t
–2
+
λ
(1 –
λ
)
3
X
t
–3
... (12.13)
The values of
Z
t
depend of course on the value of
λ
. You construct ten versions of the
Z
t
variable
using the following values for
λ
: 0.1, 0.2, 0.3, ..., 1.0 and fit (12.12) with each of them. The version
with the lowest residual sum of squares is by definition the least squares solution. Note that the
regressions involve a regression of
Y
on the different versions of
Z
in a simple regression equation and
so the problem of multicollinearity has been completely eliminated.
Table 12.3 shows the parameter estimates and residual sums of squares for a grid search where
the dependent variable was the logarithm of housing services and the explanatory variables were the
logarithms of
DPI
and the relative price series for housing. Eight lagged values were used. You can
see that the optimal value of
λ
is between 0.4 and 0.5, and that the income elasticity is about 1.13 and
the price elasticity about –0.32. If we had wanted a more precise estimate of
λ
, we could have
continued the grid search with steps of 0.01 over the range from 0.4 to 0.5. Note that the implicit
income coefficient for
X
t
–8
,
β
2
λ
(1 –
λ
)
8
, was about 1.13×0.5
9
= 0.0022. The corresponding price
coefficient was even smaller. Hence in this case eight lags were more than sufficient.
MODELS USING TIME SERIES DATA
9
T
ABLE
12.3
Logarithmic Regression of Expenditure on Housing Services on
Disposable Personal Income and a Relative Price Index, Assuming
an Adaptive Expectations Model, Fitted Using a Grid Search
λ
b
2
s.e.(
b
2
)
b
3
s.e.(
b
3
)
RSS
0.1 1.67 0.01 –0.35 0.07 0.001636
0.2 1.22 0.01 –0.28 0.04 0.001245
0.3 1.13 0.01 –0.28 0.03 0.000918
0.4 1.12 0.01 –0.30 0.03 0.000710
0.5 1.13 0.01 –0.32 0.03 0.000666
0.6 1.15 0.01 –0.34 0.03 0.000803
0.7 1.16 0.01 –0.36 0.03 0.001109
0.8 1.17 0.01 –0.38 0.04 0.001561
0.9 1.17 0.01 –0.39 0.04 0.002137
1.0 1.18 0.01 –0.40 0.05 0.002823
Dynamics in the Adaptive Expectations Model
As you can see from (12.10),
X
t
, the current value of
X
, has coefficient
β
2
λ
in the equation for
Y
t
. This
is the short-run or impact effect of
X
on
Y
. At time
t
, the terms involving lagged values of
X
are
already determined and hence effectively form part of the intercept in the short-run relationship.
However we can also derive a long-run relationship between
Y
and
X
by seeing how the equilibrium
value of
Y
would be related to the equilibrium value of
X
, if equilibrium were ever achieved. Denoting
equilibrium
Y
and
X
by
Y
and
X
, respectively, in equilibrium
YY
t
=
and
XXXX
ttt
====
−−
...
21
. Substituting into (12.10), one has
X
X
XXXY
21
2
21
2
2221
...])1()1([
...)1()1(
β
β
λλλλλ
β
β
λλ
β
λλ
β
λ
β
β
+=
+−+−++=
+−+−++=
(12.14)
To see the last step, write
S
=
λ
+
λ
(1 –
λ
) +
λ
(1 –
λ
)
2
... (12.15)
Then
(1 –
λ
)
S
=
λ
(1 –
λ
)
+
λ
(1 –
λ
)
2
+
λ
(1 –
λ
)
3
... (12.16)
Subtracting (12.16) from (12.15),

MODELS USING TIME SERIES DATA
10
S – (1 –
λ
)S =
λ
(12.17)
and hence S is equal to 1. Thus the long-run effect of X on Y is given by
β
2
.
An alternative way of exploring the dynamics of an adaptive expectations model is to perform
what is known as a Koyck transformation. This allows us to express the dependent variable in terms
of a finite number of observable variables: the current values of the explanatory variable(s) and the
dependent variable itself, lagged one time period. We start again with the original equations and
combine them to obtain (12.20):
t
e
tt
uXY
++=
+
121
β
β
(12.18)
e
tt
e
t
XXX )1(
1
λλ
−+=
+
(12.19)
(
)
t
e
tt
t
e
ttt
uXX
uXXY
+−++=
+−++=
)1(
)1(
221
21
λ
β
λ
β
β
λλ
β
β
(12.20)
Now if (12.18) is true for time t, it is also true for time t–1:
1211
−−
++=
t
e
tt
uXY
β
β
(12.21)
Hence
1112
−−
−−=
tt
e
t
uYX
β
β
(12.22)
Substituting this into (12.20), we now have
1211
11121
)1()1(
))(1(
−−
−−
−−++−+=
+−−−++=
tttt
ttttt
uuXY
uuYXY
λλ
β
λλ
β
β
λλ
β
β
(12.23)
As before the short-run coefficient of X is
β
2
λ
, the effective intercept for the relationship being
β
1
λ
+ (1 –
λ
)Y
t
–1
at time t. In equilibrium, the relationship implies
XYY
λ
β
λλ
β
21
)1(
+−+=
(12.24)
and so
XY
21
β
β
+=
(12.25)
Hence again we obtain the result that
β
2
gives the long-run effect of X on Y.
We will investigate the relationship between the short-run and long-run dynamics graphically.
We will suppose, for convenience, that
β
2
is positive and that X increases with time, and we will
neglect the effect of the disturbance term. At time t, Y
t
is given by (12.23). Y
t
–1
has already been
determined, so the term (1 –
λ
)Y
t
–1
is fixed. The equation thus gives the short-run relationship between
MODELS USING TIME SERIES DATA
11
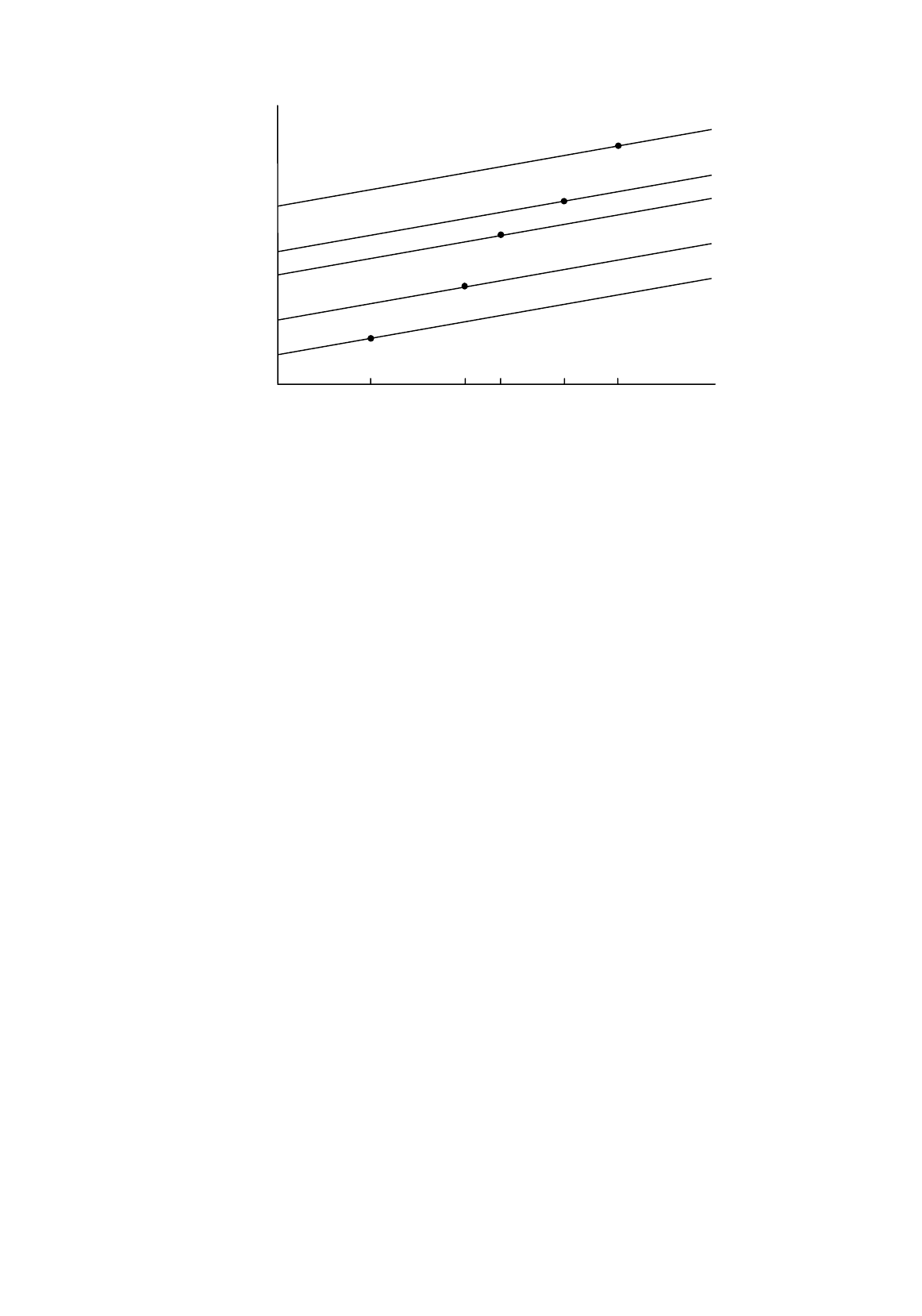
Figure 12.2.
Short-run and long-run dynamics in the adaptive expectations model
Y
t
and X
t
. [
β
1
λ
+ (1 –
λ
)Y
t
–1
] is effectively the intercept and
β
2
λ
is the slope coefficient. When we
come to time t+1, Y
t
+1
is given by
Y
t
+1
=
β
1
λ
+
β
2
λ
X
t
+1
+ (1 –
λ
)Y
t
(12.26)
and the effective intercept is now [
β
1
λ
+ (1 –
λ
)Y
t
]. Since X is increasing, Y is increasing, so the
intercept is larger than that for Y
t
and the short-run relationship has shifted upwards. The slope is the
same as before,
β
2
λ
. Thus two factors are responsible for the growth of Y: the direct effect of the
increase in X, and the gradual upward shift of the short-run relationship. Figure 12.2 shows the
outcomes for time t as far as time t+4. You can see that the long-run relationship is steeper than the
short-run one.
Example: Friedman’s Permanent Income Hypothesis
Without doubt the most celebrated application of the adaptive expectations model is Friedman’s use of
it when fitting an aggregate consumption function using time series data. In the early years after the
Second World War, econometricians working with macroeconomic data were puzzled by the fact that
the long-run average propensity to consume seemed to be roughly constant, despite the marginal
propensity to consume being much lower. A model in which current consumption was a function of
current income could not explain this phenomenon and was therefore clearly too simplistic. Several
more sophisticated models that could explain this apparent contradiction were developed, notably
Friedman's Permanent Income Hypothesis, Brown's Habit Persistence Model (discussed in the next
section), Duesenberry's Relative Income Hypothesis and the Modigliani–Ando–Brumberg Life Cycle
Model.
Under the Permanent Income Hypothesis, permanent consumption,
P
t
C , is proportional to
permanent income,
P
t
Y :
αλ
+ (1–
λ
)
Y
t
–1
αλ
+
(
1–
λ
)
Y
t
αλ
+
(
1–
λ
)
Y
t
+2
αλ
+ (1–
λ
)
Y
t
+3
X
t
X
t
+1
X
t
+3
X
t
+4
X
Y
αλ
+ (1–
λ
)
Y
t
+1
X
t
+2

MODELS USING TIME SERIES DATA
12
P
t
P
t
YC
2
β
=
(12.27)
Actual consumption,
C
t
, and actual income,
Y
t
, also contain transitory components,
T
t
C
and
T
t
Y
respectively:
T
t
P
tt
CCC
+=
(12.28)
T
t
P
tt
YYY
+=
(12.29)
It is assumed, at least as a first approximation, that the transitory components of consumption and
income have expected value 0 and are distributed independently of their permanent counterparts and
of each other. Substituting for
P
t
C
in (12.27) using (12.28) one has
T
t
P
tt
CYC
+=
2
β
(12.30)
We thus obtain a relationship between actual consumption and permanent income in which
T
t
C
plays
the role of a disturbance term, previously lacking in the model.
Earlier, when we discussed the permanent income hypothesis in the context of cross-section data,
the observations related to households. When Friedman fitted the model, he actually used aggregate
time series data. To solve the problem that permanent income is unobservable, he hypothesized that it
was subject to an adaptive expectations process in which the notion of permanent income was updated
by a proportion of the difference between actual income and the previous period’s permanent income:
)(
11
P
tt
P
t
P
t
YYYY
−−
−=−
λ
(12.31)
Hence permanent income at time
t
is a weighted average of actual income at time
t
and permanent
income at time
t
–1:
P
tt
P
t
YYY
1
)1(
−
−+=
λλ
(12.32)
Friedman used (12.32) to relate permanent income to current and lagged values of income. Of
course it cannot be used directly to measure permanent income in year
t
because we do not know
λ
and we have no way of measuring
P
t
Y
1
−
. We can solve the second difficulty by noting that, if (12.32)
holds for time
t
, it also holds for time
t
–1:
P
tt
P
t
YYY
211
)1(
−−−
−+=
λλ
(12.33)
Substituting this into (12.28), we obtain
P
ttt
P
t
YYYY
2
2
1
)1()1(
−−
−+−+=
λλλλ
(12.34)