Das Sh.P. Statistical Physics of Liquids at Freezing and Beyond
Подождите немного. Документ загружается.

A7.2 The MSR field theory 351
the Jacobian is therefore essential in maintaining causality. The latter also ensures that the
response functions are time-ordered. In our discussion of the models described in this book,
we treat the Jacobian as a constant. In some cases (see the discussion with a p-spin model
in Section 8.4, eqn. (8.4.10)) the Jacobian can also be simply absorbed as a correction
term in the action functional (De Dominics, 1978; De Dominicis and Pelti, 1978)inthe
thermodynamic limit.
A7.2 The MSR field theory
Here we establish the crucial relations (7.1.28)–(7.1.31) which express self-consistently
the self-energy of the MSR field theory in terms of the full correlation functions G.
We start from the standard functional identity,
D(%)
δ
δ%(1)
[e
−A
x
i(%)
]=0, (A7.2.1)
corresponding to the action functional (7.1.22) having cubic vertices. The above identity is
equivalent to
-
δ A
ξ
δ%(1)
.
= 0. (A7.2.2)
Using the expression (7.1.22) for the MSR functional, we obtain
G
−1
0
(1
¯
2)G(
¯
2) + V (1
¯
2
¯
3)%(
¯
2)%(
¯
3)=ξ(1). (A7.2.3)
We have adopted in the above equation the summation convention, i.e., the repeated indices
(with a bar) are summed over. We also use the fact that the three-point vertex function
V (123) is symmetric under exchange of the indices. This is an important property of the
vertex function V and we use it repeatedly in this chapter:
δ
δξ(2)
G(1) =
δ
δξ(2)
D%
e
−A
ξ
Z
%(1)
=%(1)%(2)−%(1)%(2)
=δ%(1)δ%(2)≡G(12). (A7.2.4)
The above equation reduces to the standard result
%(1)%(2)=%(1)%(2)+G(12). (A7.2.5)
On reorganizing the terms in (A7.2.3), we obtain
G
−1
0
(1
¯
2)G(
¯
2) + V (1
¯
2
¯
3)
!
G(
¯
2)G(
¯
3) + G(
¯
2
¯
3)
"
= ξ(1). (A7.2.6)
352 Appendix to Chapter 7
On taking one more derivative of eqn. (A7.2.6) w.r.t. the current ξ(2), we obtain the
equation
G
−1
0
(1
¯
2)G(
¯
22) + V (1
¯
2
¯
3)
G(
¯
22)G(
¯
3) + G(
¯
2)G(
¯
32) +
δ
δξ(
¯
2)
G(
¯
32)
= δ(12).
(A7.2.7)
Starting from the definition of the inverse of a matrix,
G
−1
(1
¯
2)G(
¯
21) = δ(12), (A7.2.8)
and differentiating with respect to ξ(3), we obtain
δG
−1
(1
¯
2)
δξ(3)
G(
¯
22) + G
−1
(1
¯
2)
δG(
¯
22)
δξ(3)
= 0, (A7.2.9)
or, equivalently,
δG(23)
δξ(4)
=−G(2
¯
3)
δG
−1
(
¯
3
¯
4)
δξ(4)
G(
¯
43). (A7.2.10)
By substituting (A7.2.9) into (A7.2.7) we obtain
G
−1
0
(1
¯
2)G(
¯
22) + 2V (1
¯
3
¯
2)G(
¯
3)G(
¯
22)
− V (1
¯
2
¯
3)G(
¯
2
¯
4)
δG
−1
(
¯
4
¯
5)
δξ(
¯
3)
G(
¯
52) = δ(12). (A7.2.11)
On formally defining the self-energy matrix in terms of the inverse of the full Green
function, we obtain
G
−1
0
(1
¯
2) −
˜
(1
¯
2)
G(
¯
22) = δ(12), (A7.2.12)
where the inverse of the full Green-function matrix in the form of the Schwinger–Dyson
equation is given by:
G
−1
= G
−1
0
(1
¯
2) − (1
¯
2). (A7.2.13)
The self-energy matrix is obtained as
(12) =−2V (12
¯
3)G(
¯
3) + V (1
¯
2
¯
3)G(
¯
2
¯
4)
δG
−1
(
¯
42)
δξ(
¯
3)
, (A7.2.14)
with the renormalized three-point vertex function R(123) defined as
−
δ(12)
δξ(3)
≡
δG
−1
(12)
δξ(3)
= R(12
¯
3)G(
¯
33). (A7.2.15)
The following self-consistent expression is obtained for the self-energy matrix in terms
of correlation functions:
(12) =−2V (12
¯
3)G(
¯
3) + V (1
¯
2
¯
3)G(
¯
2
¯
4)R(
¯
42
¯
5)G(
¯
5
¯
3). (A7.2.16)
A7.2 The MSR field theory 353
Next we obtain a self-consistent equation for computing the vertex function R as a pertur-
bation series in the bare vertex V .Fromeqn. (A7.2.6) we see that ξ(1) can be expressed
in terms of G(1) and G(12), order by order in perturbation theory. We therefore make a
change of variables from ξ(1) to {G(1), G(12)} and use the chain rule to write
δG
−1
(12)
δξ(3)
=
δG
−1
(12)
δG(
¯
4)
δG(
¯
4)
δξ(3)
+
δG
−1
(12)
δG(
¯
3
¯
4)
δG(
¯
3
¯
4)
δξ(3)
. (A7.2.17)
Now, on substituting the useful identity (A7.2.10), the above relation reduces to
δG
−1
(12)
δξ(3)
=
δG
−1
(12)
δG(
¯
4)
G(
¯
43) −
δ(12)
δG(
¯
3
¯
4)
G(
¯
3
¯
6)
δG
−1
(
¯
6
¯
5)
δξ(3)
G(
¯
5
¯
4). (A7.2.18)
We use the Schwinger–Dyson equation (A7.2.13) to replace the functional derivatives
δG
−1
(12)
δξ(3)
−→ −
δ(12)
δξ(3)
(A7.2.19)
and obtain eqn. (A7.2.18) in the form
δ(12)
δξ(3)
=
δ(12)
δG(
¯
3)
G(
¯
33) +
δ(12)
δG(
¯
3
¯
4)
G(
¯
3
¯
6)
δ(
¯
6
¯
5)
δξ(3)
G(
¯
5
¯
4). (A7.2.20)
The above relation is written as the following self-consistent equation for the three-point
vertex function R(123):
R(123) = (123) +U (12
¯
3
¯
4)G(
¯
3
¯
5)G(
¯
4
¯
6)R(
¯
6
¯
53), (A7.2.21)
with the three- and four-point vertex functions (123) and U (1234) defined as
(123) ≡
δ(12)
δG(3)
, (A7.2.22)
U (1234) ≡
δ(12)
δG(34)
. (A7.2.23)
Equation (A7.2.21) for the renormalized vertex function can easily be rearranged with the
following formal rearrangements (to avoid clutter we drop the arguments of the various
functions, with the understanding that all the indices and coordinates except the external
three points (123) are summed over):
R = + UGGR
= +UGG +UGGUGGR
= +UGG +UGGUGG +UGGUGGUGGR
= +
[
U + UGGU + UGGUGGU +···
]
GG
= + T GG, (A7.2.24)
where the new four-point vertex T is now obtained in terms of the integral equation
T = U + UGGU + UGGUGGU +···≡U + UGGT . (A7.2.25)
354 Appendix to Chapter 7
Hence we obtain the following self-consistent integral equations for the vertex functions:
R(123) = (123) + T (1
¯
4
¯
53)G(
¯
4
¯
6)G(
¯
5
¯
7)(
¯
7
¯
62). (A7.2.26)
The four-point kernel T (1234) is to be determined from the integral equation
T (1234) = U (1234) +U (1
¯
2
¯
34)G(
¯
2
¯
4)G(
¯
3
¯
5)T (
¯
5
¯
423). (A7.2.27)
The three-point vertex function (123) is obtained by solution of the following self-
consistent equation:
(123) =
δG
−1
(12)
δG(3)
=−
δ(12)
δG(3)
−
δ(12)
δG(
¯
4
¯
5)
δG(
¯
4
¯
5)
δG(3)
= 2V (123) +
δ(12)
δG(
¯
4
¯
5)
G(
¯
4
¯
6)G(
¯
5
¯
7)
δG
−1
(
¯
6
¯
7)
δG(3)
. (A7.2.28)
In obtaining the last equality we express the derivative in the second term on the RHS as
δG(12)
δG(3)
=−G(1
¯
2)
δG
−1
(
¯
2
¯
3)
δG(3)
G(
¯
32). (A7.2.29)
The above result follows from the identity (A7.2.10). Equation (A7.2.28) is now obtained
in the form of a self-consistent equation for the three-point vertex function (123),
(123) = 2V (123) +U (12
¯
4
¯
5)G(
¯
4
¯
6)G(
¯
5
¯
7)(
¯
63
¯
7). (A7.2.30)
Equations (A7.2.16), (A7.2.26), (A7.2.27), and (A7.2.30) provide a formal structure of the
renormalization of the linear theory in terms of the self-energy matrix expressed in terms
of correlation functions. The lowest-order contribution (in the perturbation theory in terms
of the bare vertex function V )to(12) is obtained by replacing both R and with the
bare vertex 2V ,
(12) = 2V (1
¯
2
¯
3)G(
¯
2
¯
4)V (
¯
42
¯
5)G(
¯
5
¯
3), (A7.2.31)
where we assume that the symmetric state corresponds to current ξ = 0 and that the one-
point function G(1) = 0, and hence the first term in (A7.2.16), disappears. Using this form
for in the definition (A7.2.22), the lowest-order contribution to the four-point vertex
function is obtained as
U (1234) = 4V (12
¯
3)G(
¯
3
¯
4)V (34
¯
4). (A7.2.32)
The above result for U, when substituted into the renormalization for the vertex func-
tion (and hence R), gives the two-loop contribution to the self-energy. The bare vertex
function V (123) is determined from the nonlinearities in the equations of motion for the
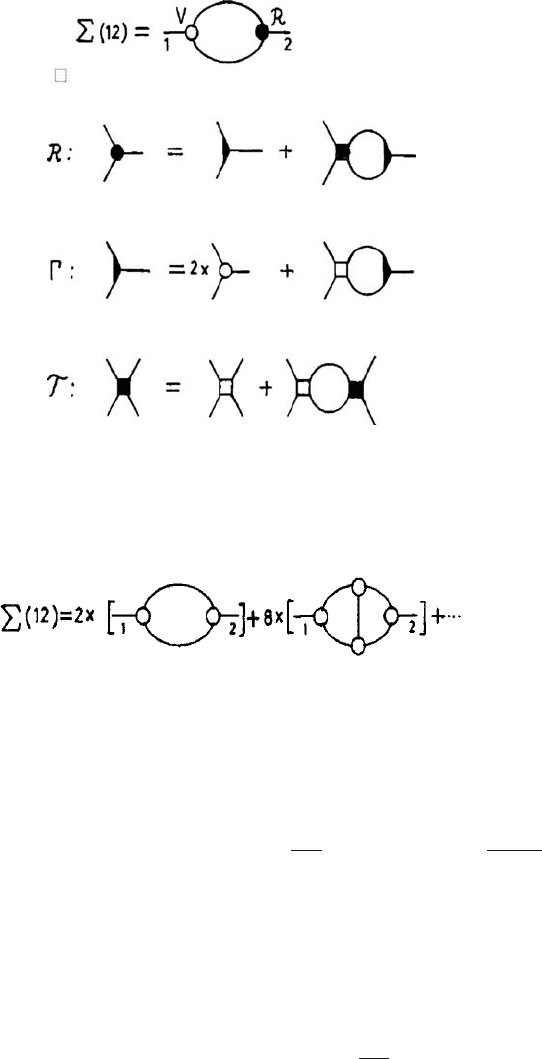
slow modes. The standard set of graphs representing the coupled equations (A7.2.16) and
(A7.2.26) is shown in Fig. A7.1. A graphical expansion for in terms of the bare vertices
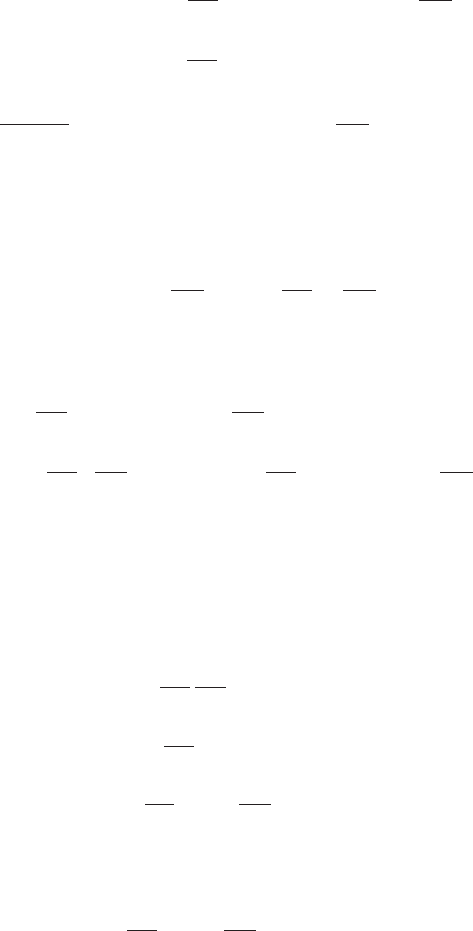
V and the full correlation functions G can be obtained to any arbitrary order in principle.
In Fig. A7.2 the diagrammatic expansion up to second order in k
B
T is shown. In practice
the renormalization has been considered only up to one-loop order.
A7.3 Invariance of the MSR action 355
Fig. A7.1 The diagrammatic expansion for the self-energy as given by the self-consistent expres-
sions in eqns. (A7.2.16)–(A7.2.27). Open and closed each with three attached legs represent
V (123) and R(123), respectively. Closed with three attached legs represent (123). Open and
closed squares with four attached legs represent U (1234) and T (1234), respectively. The lines
joining both ends with the vertices represent fully renormalized correlation or response functions.
Fig. A7.2 The expansion for the self-energy as given in Fig. A7.1 up to second order in k
B
T .
A7.3 Invariance of the MSR action
Now let us consider the MSR action (7.1.13) for this Langevin dynamics:
A[ψ,
ˆ
ψ]=
t
2
t
1
dt
ˆ
ψ
i
(t)β
−1
L
0
ij
ˆ
ψ
j
(t) + i
ˆ
ψ
i
(t)
∂ψ
i
∂t
−
#
Q
ij
[ψ]−L
0
ij
$
δF
δψ
j
(t)
.
(A7.3.1)
The time-reversal property of the MSR action A[ψ,
ˆ
ψ] depends on how the fields ψ and
ˆ
ψ change under T . While the change for ψ is given by eqn. (A7.3.1), we need to specify
the change for
ˆ
ψ. For this we note that the action functional A involves, apart from ψ
i
and
ˆ
ψ
i
, the functional derivative δF/δψ
i
. Therefore we use the following prescription for
ˆ
ψ
i
:
T
ˆ
ψ
i
(t) =
ˆ
ψ
i
(−t) =−κ
i
ˆ
ψ
i
(t) − γ
δF
δψ
i
, (A7.3.2)
356 Appendix to Chapter 7
where κ and γ are open parameters that can be chosen so as to control the behavior of A
under T . We now consider using (A7.3.1) and (A7.3.2), the effect of time reversal on the
MSR action:
TA= β
−1
κ
2
t
2
t
1
dt
ˆ
ψ
i
(−t) − γ
δF
δψ
i
−t
L
0
ij
ˆ
ψ
j
(−t) − γ
δF
δψ
j
−t
+i κ
i
t
2
t
1
dt
ˆ
ψ
i
(−t) − γ
δF
δψ
i
−t
×
i
∂ψ
i
(−t)
∂(−t)
−
#
i
j
Q
ij
[ψ(−t)]+L
0
ij
$
j
δF
δψ
j
−t
= β
−1
κ
2
I
1
+i κI
2
. (A7.3.3)
The two integrals I
1
and I
2
are evaluated in the following forms:
I
1
=
t
2
t
1
dt L
0
ij
ˆ
ψ
i
ˆ
ψ
j
− 2γ
ˆ
ψ
i
δF
δψ
j
+ γ
2
δF
δψ
i
δF
δψ
j
−t
(A7.3.4)
and
I
2
=
t
2
t
1
dt
ˆ
ψ
i
3
∂ψ
i
∂t
−
(
Q
ij
[ψ]+L
0
ij
)
δF
δψ
j
4
−t
− γ
t
2
t
1
dt
δF
δψ
i
∂ψ
i
∂t
−t
+ γ
t
2
t
1
dt
δF
δψ
i
#
Q
ij
[ψ]+L
0
ij
$
δF
δψ
j
−t
= I
2
+ J
1
+ J
2
, (A7.3.5)
where we have denoted on the RHS of both equations by use of the subscript “−t” that the
fields ψ and
ˆ
ψ within the square brackets are evaluated at time −t. We first evaluate the
integrals J
1
, and J
2
,
J
1
=−γ
t
2
t
1
dt
δF
δψ
i
∂ψ
i
∂t
−t
=−γ
−t
1
−t
2
dt
∂ F
t
∂t
=−γ
!
F
−t
1
− F
−t
2
"
, (A7.3.6)
J
2
= γ
t
2
t
1
dt
δF
δψ
i
L
0
ij
[ψ]
δF
δψ
j
−t
. (A7.3.7)
In evaluating J
2
we have used the fact that
t
2
t
1
dt
δF
δψ
i
Q
ij
[ψ]
δF
δψ
j
−t
= 0, (A7.3.8)
A7.4 The memory-function approach 357
since Q
ij
is odd under the exchange of i and j.Usingeqns. (A7.3.6) and (A7.3.8) in eqn.
(A7.3.5), we obtain for the integral I
2
the result
I
2
=
t
2
t
1
dt
ˆ
ψ
i
3
∂ψ
i
∂t
−
(
Q
ij
[ψ]+L
0
ij
)
δF
δψ
j
4
−t
− γ
!
F
−t
1
− F
−t
2
"
+ γ
t
2
t
1
dt
δF
δψ
i
L
0
ij
[ψ]
δF
δψ
j
−t
. (A7.3.9)
Using the results of (A7.3.4) and (A7.3.9),ineqn. (A7.3.3), we obtain
TA[ψ,
ˆ
ψ]=κ
2
t
2
t
1
dt
ˆ
ψ
i
β
−1
ˆ
ψ
j
−t
− γ
!
F
−t
1
− F
−t
2
"
+
iκ
ˆ
ψ
i
∂ψ
i
∂t
− Q
ij
[ψ]
δF
δψ
j
+i {2iβ
−1
κγ − 1}L
0
ij
δF
δψ
j
−t
+ (iκγ + β
−1
γ
2
κ
2
)
t
2
t
1
dt
δF
δψ
i
L
0
ij
[ψ]
δF
δψ
j
−t
. (A7.3.10)
We now adjust the parameters so that the MSR action remains invariant under the transfor-
mation T . We therefore require that
κ
2
= 1, 2iβ
−1
κγ − 1 = 1, i κγ + β
−1
γ
2
κ
2
= 0. (A7.3.11)
More specifically, we choose κ =−1 and β
−1
γ = i so that
TA[ψ,
ˆ
ψ]=
−t
2
−t
1
dt
ˆ
ψ
i
β
−1
ˆ
ψ
j
+i
ˆ
ψ
i
∂ψ
i
∂t
−
#
Q
ij
[ψ]−L
0
ij
$
δF
δψ
j
−
!
F
−t
1
− F
−t
2
"
= A[ψ,
ˆ
ψ]+
!
F
−t
2
− F
−t
1
"
, (A7.3.12)
since finally we take the limit t
1
=−t
2
→∞. This makes the transformation T which
leaves the MSR action invariant (up to a constant) as follows:
ψ
i
(x, −t) →
i
ψ
i
(x, t), (A7.3.13)
ˆ
ψ
i
(x, −t) →−
i
ˆ
ψ
i
(x, t) − iβ
δF
δψ
i
(x, t)
. (A7.3.14)
If F is a non-Gaussian functional of the fields {ψ
i
} then the above transformations which
leave the MSR action invariant are nonlinear.
A7.4 The memory-function approach
We present below an alternative deduction of the mode-coupling model using the
projection-operator method.

358 Appendix to Chapter 7
A7.4.1 The projection-operator method
The projection-operator scheme provides us with a way of describing the dynamics of a
many-particle system in terms of a reduced set of variables, given a proper definition of
their inner product. In the present context of the dynamics of fluids, we use the set of local
densities of the conserved properties of mass, momentum, and energy to constitute the
chosen set of slow modes. The average w.r.t. equilibrium ensemble is taken as the inner
product. In general, for the deterministic equations of hydrodynamics the conserved densi-
ties refer to the corresponding fluctuating quantity averaged over some suitable statistical
ensemble. The projection-operator technique, on the other hand, constructs the equations
of motion which apply to the time evolution of the corresponding fluctuating property in
any single member of the ensemble.
Let us consider a set of dynamic variables {A
i
(r, t)} whose time evolution follows from
the Liouville equation,
∂ A
i
∂t
+ LA
i
= 0, (A7.4.1)
involving the Liouville operator L (Hansen and McDonald, 1986). The formal solution
of the above equation gives A
i
(t) = exp(iLt) A
i
. We define A
i
such that its equilibrium
average is equal to zero and use the notation A
i
(t = 0) ≡ A
i
. The correlation function C
ij
of the variables A
i
is defined as
C
ij
(t) =
1
A
∗
i
(t) A
j
(0)
2
, (A7.4.2)
where the angular brackets denote an average over the equilibrium distribution. The pro-
jection operator P is defined through its action on a dynamic variable B(t),
P B(t) =
j,k
+
B(t)A
∗
j
,+
A
∗
j
A
k
,
−1
A
k
. (A7.4.3)
The operator
Q = 1 −P (A7.4.4)
denotes the projection in the orthogonal subspace. The projection operator satisfies the
properties
P
2
= P, Q
2
= Q, PQ = QP = 0. (A7.4.5)
Next we make use of the following operator identity:
e
itL
= e
itQL
+
t
0
ds e
i(t−s)L
PLe
isQL
. (A7.4.6)
The above identity is proved easily by taking the Laplace transform of the RHS and then
applying the convolution theorem. Defining the Laplace transform of a function f (t) as
f (z) = (−i)
∞
0
dt e
izt
f (t), Im(z)>0, (A7.4.7)

A7.4 The memory-function approach 359
we obtain
1
z + QL
−
1
z + L
PL
1
z + QL
=
1
z + QL
−
1
z + L
{
L − QL
}
1
z + QL
=
1
z + L
z + L − L + QL
z + QL
=
1
z + L
. (A7.4.8)
The final expression reached is the Laplace transform of the LHS of (A7.4.6).Nextwe
operate with both sides of this operator identity on QL A
i
. The LHS gives, using Q =1 −P,
e
itL
QLA
i
= e
itL
LA
i
− e
itL
PLA
i
=
∂
∂t
e
itL
A −e
itL
+
(LA
i
)A
∗
j
,+
A
∗
j
A
k
,
−1
A
k
=
∂ A
i
(t)
∂t
−
+
(LA
i
)A
∗
j
,+
A
∗
j
A
k
,
−1
A
k
(t). (A7.4.9)
In eqn. (A7.4.9) we have used the fact that the averaged quantities are independent of
phase-space variables and the operator L does not act on them. Using the identity (A7.4.6)
for e
itL
on the LHS,
R
i
(t) +
t
0
ds e
i(t−s)L
+
(LR
i
(s)) A
∗
j
,+
A
∗
j
A
k
,
−1
A
k
= R
i
(t) +
t
0
ds
+
(LR
i
(s)) A
∗
j
,
A
j
A
k
−1
A
k
(t − s), (A7.4.10)
where we have defined
R
i
(t) = e
itQL
QLA
i
= e
itQLQ
QLA
i
. (A7.4.11)
We have used the property (A7.4.5) of the operator Q in reaching the last equality. There-
fore, on equating the two sides of eqn. (A7.4.9), an equation for the time evolution of the
dynamic variables A
i
(t) is obtained in the following matrix form:
˙
A(t) − i · A(t) +
t
0
M(t − s) · A(s)ds = R(t). (A7.4.12)
A refers to a column vector with the A
i
, i = 1,..., n (say) as elements. is the n × n
frequency matrix. Using the anti-Hermitian nature of the operator L, the matrix elements
ij
are obtained as
ij
=
k
1
A
∗
i
iL A
k
21
A
∗
k
A
j
2
−1
. (A7.4.13)
R is a column matrix with elements R
i
(i = 1,..., n) given by eqn. (A7.4.11).
Equation (A7.4.12) is in fact a simple consequence of the Liouville equation arranged
in a different form. The construction of this mathematical identity involves the projection
operator P, which is based on a suitably chosen inner product. Its physical meaning is clear
only when we interpret this equation as a Langevin equation for a set of “slow” variables
{A
i
}. The many remaining degrees of freedom other than {A
i
} for the system are spanned
360 Appendix to Chapter 7
by the operator Q. Their role in the dynamics is given by R
i
(t) in (A7.4.12), and they are
treated as “noise.” The identification of this equation with the Langevin equation (A7.4.12)
is therefore closely linked to R
i
(t) having the characteristics of the Langevin noise with
respect to the slow variables {A
i
}. The average of the noise over the initial nonequilibrium
ensemble must be zero. Using the maximum-entropy principle, similarly to what we did in
the case of the equilibrium ensemble, we write the nonequilibrium distribution
ne
as
ne
(, 0) =
eq
()
!
1 + μ
i
A
∗
i
() +···
"
, (A7.4.14)
where the {μ
i
} represent the Lagrange multipliers to be determined in terms of the corre-
sponding averages A
i
in the nonequilibrium ensemble. Using (A7.4.14), we obtain for
the average of the noise over the initial nonequilibrium ensemble
R
i
(t)=
d R
i
(t)
eq
()
⎡
⎣
1 +
j
μ
j
A
∗
j
() + O(μ
2
)
⎤
⎦
. (A7.4.15)
The first term on the RHS gives a vanishing contribution, since for the equilibrium state,
for any time,
A(t)=A
eq
= 0, (A7.4.16)
and hence, from the equation of motion, we obtain
R
i
(t)
eq
= 0. (A7.4.17)
For the second term on the RHS to vanish we must have
R
i
(t)=
d R
i
(t)
eq
()A
∗
j
() = 0. (A7.4.18)
At this point the equilibrium average is taken as the inner product in the definition of the
projection operator. This identification ensures that the noise average is zero to linear order
in deviation from the equilibrium, with R
i
(t) remaining orthogonal to the space of A at all
times,
1
A
∗
i
R
j
(t)
2
= 0. (A7.4.19)
The kernel matrix M in (A7.4.12) links the dynamics of A to its values at earlier times and
is termed the memory-function matrix. M is expressed in terms of the correlation of the
force R(t ) in the orthogonal subspace of Q. The correlation function in the second term on
the RHS of (A7.4.10) is simplified using the anti-Hermitian nature of L,
+
(LR
i
(s)) A
∗
j
,
=−R
i
(s)(L A
j
)
=−R
i
(s)(1 −P)(LA
j
). (A7.4.20)
In obtaining the last equality, we have made use of the property
R
i
(s)P(LA
j
)=0, (A7.4.21)