Czichos H., Saito T., Smith L.E. (Eds.) Handbook of Metrology and Testing
Подождите немного. Документ загружается.



339
Mechanical Pr
7. Mechanical Properties
Materials used in engineering applications as
structural components are subject to loads,de-
fined by the application purpose. The mechanical
properties of materials characterize the response
of a material to loading.
The mechanical loading action on materials
in engineering applications may be static or dy-
namic and can basically be categorized as tension,
compression, bending, shear, and torsion. In ad-
dition, thermomechanical loading effects can occur
(Chap. 8). There may also be gas loads from the
environment, leading to gas/materials interac-
tions (Chap. 6) and to transport phenomena such
as permeation and diffusion.
The mechanical loading action and the corre-
sponding response of materials can be illustrated
by the well-known stress–strain curve (for def-
inition see Sect. 7.1.2). Its different regimes and
characteristic data points characterize the me-
chanical behavior of materials treated in this
chapter in terms of elasticity (Sect. 7.1), plasticity
(Sect. 7.2), hardness (Sect. 7.3), strength (Sect. 7.4),
and fracture (Sect. 7.5). Methods for the determi-
nation of permeation and diffusion are compiled
in Sect. 7.6.
7.1 Elasticity.............................................. 340
7.1.1 Development of Elasticity Theory.... 340
7.1.2 Definition of Stress and Strain,
and Relationships Between Them .. 341
7.1.3 Measurement of Elastic Constants
in Static Experiments .................... 344
7.1.4 Dynamic Methods
of Determining Elastic Constants .... 349
7.1.5 Instrumented Indentation
as a Method of Determining
Elastic Constants .......................... 352
7.2 Plasticity.............................................. 355
7.2.1 Fundamentals of Plasticity ............ 355
7.2.2 Mechanical Loading Modes Causing
Plastic Deformation ...................... 357
7.2.3 Standard Methods
of Measuring Plastic Properties ...... 358
7.2.4 Novel Test Developments
for Plasticity ................................ 365
7.3 Hardness ............................................. 366
7.3.1 Conventional Hardness Test
Methods (Brinell, Rockwell, Vickers
and Knoop) ................................. 368
7.3.2 Selecting a Conventional Hardness
Test Method and Hardness Scale .... 374
7.3.3 Measurement Uncertainty in
Hardness Testing (HR, HBW, HV, HK) 376
7.3.4 Instrumented Indentation Test (IIT) 378
7.4 Strength .............................................. 388
7.4.1 Quasistatic Loading ...................... 389
7.4.2 Dynamic Loading ......................... 398
7.4.3 Temperature
and Strain-Rate Effects ................. 401
7.4.4 Strengthening Mechanisms
for Crystalline Materials ................ 402
7.4.5 Environmental Effects................... 404
7.4.6 Interface Strength:
Adhesion Measurement Methods ... 405
7.5 Fracture Mechanics ............................... 408
7.5.1 Fundamentals
of Fracture Mechanics ................... 408
7.5.2 Fracture Toughness....................... 410
7.5.3 Fatigue Crack Propagation Rate...... 419
7.5.4 Fractography ............................... 424
7.6 Permeation and Diffusion ..................... 426
7.6.1 Gas Transport:
Steady-State Permeation .............. 427
7.6.2 Kinetic Measurement.................... 429
7.6.3 Experimental Measurement
of Permeability ............................ 431
7.6.4 Gas Flux Measurement .................. 433
7.6.5 Experimental Measurement
of Gas and Vapor Sorption............. 436
7.6.6 Method Evaluations...................... 440
7.6.7 Future Projections ........................ 442
References .................................................. 442
Part C 7
340 Part C Materials Properties Measurement
7.1 Elasticity
Elastic properties of materials must be obtained by ex-
periment methods. Materials are too complicated and
theories of solids insufficiently sophisticated to obtain
accurate theoretic determinations of elastic constants.
Usually, simple static mechanical tests are used to eval-
uate the elastic constants. Specimens are either pulled
in tension, squeezed in compression, bent in flexure or
twisted in torsion and the strains measured by a variety
of techniques. The elastic constants are then calculated
from the elasticity equation relating stress to strain.
From these measurements, Young’s modulus, Poisson’s
ratio and the shear modulus are determined. These
are the moduli commonly used for the calculation of
stresses or strains in structural applications. More ac-
curate than the static method of determining the elastic
constants are the dynamic techniques that have been de-
veloped for this purpose. In these techniques a bar is set
into vibration and the resonant frequencies of the bar are
measured. A solution of the elastic equations for the vi-
bration of a bar yields a relationship between the elastic
constants, the resonant frequencies and the dimensions
of the bar. These techniques are about five times as
accurate as the static techniques for determining the
elastic constants. Elastic constants can also be meas-
ured by determining the time of flight of an elastic wave
through a plate of given thickness. Because there are
two kinds of waves that can traverse the plate (longitu-
dinal waves and shear waves), the two elastic constants
required for structural calculations can be determined
independently. Finally, the newest advances in tech-
niques for measuring the elastic constants of materials
have their origins in the need to measure these con-
stants in thin films, or parts too small to be determined
independently. The development of nanoindentation de-
vices proves to be ideal for the measurement of elastic
constants in these kinds of materials. Each of these
techniques is discussed in terms of standard American
Society for Testing and Materials (ASTM) and inter-
national test methods that were developed to assure
repeatability and reliability of testing. This discussion
serves as a primer for engineers and scientists wanting
to determine the elastic constants of materials.
7.1.1 Development of Elasticity Theory
The design of new components for structural applica-
tions usually includes an analysis of stress and strain to
assure structural reliability. Two general kinds of prac-
tical problems are encountered: the first in which all
of the forces on the surface of a body and the body
forces are known; the second in which the surface dis-
placements on the body are prescribed and the body
forces are known [7.1]. In both cases, calculation of the
stresses and displacements throughout the body and at
the body surface is the objective. Within the limits of
an elastic material, i. e., a material in which the dis-
placements and stresses completely disappear once all
of the constraints are removed, the theory for solving
such problems was completely developed by the end
of the 19th century. There are many methods of solv-
ing such problems, especially with the development of
finite element analysis. All such problems require the
elastic constants of the material of interest as an input
in order to obtain a solution. The description of experi-
mental techniques of measuring the elastic constants of
engineering materials are the main subject of this chap-
ter, but before describing the experimental techniques,
we first give a brief history of the development of the
theory of elasticity. We then go on to describe the theory
of elasticity in order to put our later discussion of exper-
imental techniques into context. There are several good
books or chapters in books that give a history of the the-
ory of elasticity [7.1–3], and there are many excellent
texts that describe the theory [7.1, 4]. The discussion
given below rests heavily on [7.1–4].
The first scientist to consider the strength of mater-
ials was Galileo in 1638 with his investigation of the
strength of a rigid cantilever beam under its own weight,
the beam being imbedded in a wall at one end [7.5]. He
treated the beam as a rigid solid and tried to determine
the condition of failure for such a beam. The concepts
of stress and strain were not yet developed, nor was it
known that the neutral axis should be in the middle of
the beam. The solution he obtained was not correct; nev-
ertheless, his worked stimulated other scientists to work
on the same problem.
The next important contributor to the theory of elas-
ticity was Hooke in 1678, when he discovered the law
that has been subsequently named after him [7.6]. He
found that the extension of a wide variety of springs
and spring-like materials was proportional to the forces
applied to the springs. This finding forms the basis of
the theory of elasticity, but Hooke did not apply the dis-
covery to material problems. A few years later (1680),
Mariotte announced the same law and used it to under-
stand the deformation of the cantilever beam [7.7]. He
argued that the resistance of a beam to flexural forces
should result from some of the filaments of the beam
Part C 7.1
Mechanical Properties 7.1 Elasticity 341
being put into tension, the rest being put into compres-
sion. He assigned the neutral axis to one-half the height
of the beam and used this assumption to correctly solve
the force distribution in the cantilever beam. Young fur-
ther developed Hooke’s law in 1807 by introducing the
idea of a modulus of elasticity [7.8,9]. Young’s modulus
was not expressed simply as a proportionality constant
between tensile stress and tensile strain. Instead, he de-
fined the modulus as the relative diminution of the length
of a solid at the base of a long column of the solid. Nev-
ertheless, his contribution was used in the development
of general equations of the theory of elasticity.
The first attempt to develop general equations of
elastic equilibrium was by Navier, whose model was
based on central-force interactions between molecules
of a solid [7.10]. He developed a set of differen-
tial equations that could be used to calculate internal
displacements in an isotropic body. The form of the
equations was correct, but because of an oversimplifica-
tion of the force law, the equations contained only one
elastic constant.
Stimulated by the work of Navier, Cauchy in 1822
developed a theory of elasticity that contained two elas-
tic constants and is essentially the one we use today
for isotropic solids (presented to the French Academy
of Sciences on Sept. 30, 1822; Cauchy published the
work in his Excercices de mathématique, 1827 and
1828. See footnote 32 in the first chapter of [7.3]). For
nonisotropic solids, many more elastic constants are
needed, and for a long time an argument raged over
whether the number of constants for the most general
type of anisotropic material should be 15 or 21. The
controversy was settled by experiments that were car-
ried out on single crystals with pronounced anisotropy,
which showed that 21 is the correct number of constants
in the most anisotropic elastic case. This number is also
supported by crystal symmetry theory.
Once the theory of elasticity was completely devel-
oped, equations could then be derived for experimental
measurement of the elastic constants. This has now
been done quite generally so that the techniques that
have been developed have a good scientific basis in the
theory of elasticity. Elastic constants can be measured
statically (tension, compression, torsion or flexure), or
dynamically through the study of vibrating bars, or by
measuring the velocity of sound through the material.
Most of these measurements are made on materials that
are isotropic, so that only two constants are determined;
however, with the development of composite materials
for structural members, isotropy is lost and other con-
stants have to be considered.
7.1.2 Definition of Stress and Strain,
and Relationships Between Them
The theory of linear elasticity begins by defining stress
and strain [7.1, 3, 4]. Stress gives the intensity of the
mechanical forces that pass through the body, whereas
strain gives the relative displacement of points within
the body. In the theory of linear elasticity, stress and
strain are related by the elastic constants, which are ma-
terial properties. In this section we define and discuss
stress and strain and show how they are related through
the elastic constants. It is these elastic constants that
must be determined in order to evaluate stress distribu-
tions in structural components.
Stresses
When a body is under load by external forces, internal
forces are set up between different parts of the body.
The intensities of these forces are usually described by
the force per unit area on the test surface through which
they act. One can imagine cutting a small test surface
within a material and replacing the material on one side
of the surface by forces that would maintain the posi-
tion of the surface in exactly the same position as it was
before the cut was made. As the size of the test surface
is diminished to zero, the sum of the forces on the sur-
face divided by the area of the surface is defined as the
magnitude of the stress on the surface. The direction of
the stress is given by the direction of the force on the
surface and need not be normal to the surface.
From the definition of stress, it is clear that the stress
on a surface will vary with orientation and position of the
surface within the solid. It is also usual to break down
the components of stress into stresses normal and paral-
lel to the surface. The stresses parallel to the surface are
called shear stresses. Because stress depends on both the
orientation of the surface, and the direction of the forces
on the surface, the symbol indicating stress will have two
subscripts attached to it, the first indicating the surface
normal, the second indicating the direction of the forces
on the surface. Consider a Cartesian coordinate system
with three mutually perpendicular axes, x
1
, x
2
,andx
3
.
Atestsurfacenormaltothe x
1
-axiswillhavestresses,σ
11
,
σ
12
,andσ
13
, where σ is the symbol for stress. The force
indicated by the stress σ
11
is on the x
1
-surface,and its ori-
entation is parallel to the x
1
-axis. The stress σ
11
is either
a tensile stress (positive sign by convention), or a com-
pressive stress (negative sign). The stresses, σ
12
and σ
13
,
are shear stresses: σ
12
beingonthex
1
-surface and ori-
entedinthex
2
-direction; σ
13
being on the x
1
-surface and
oriented in the x
3
-direction.
Part C 7.1
342 Part C Materials Properties Measurement
3
1
2
σ
22
σ
21
σ
23
σ
32
σ
33
σ
31
σ
13
σ
11
σ
12
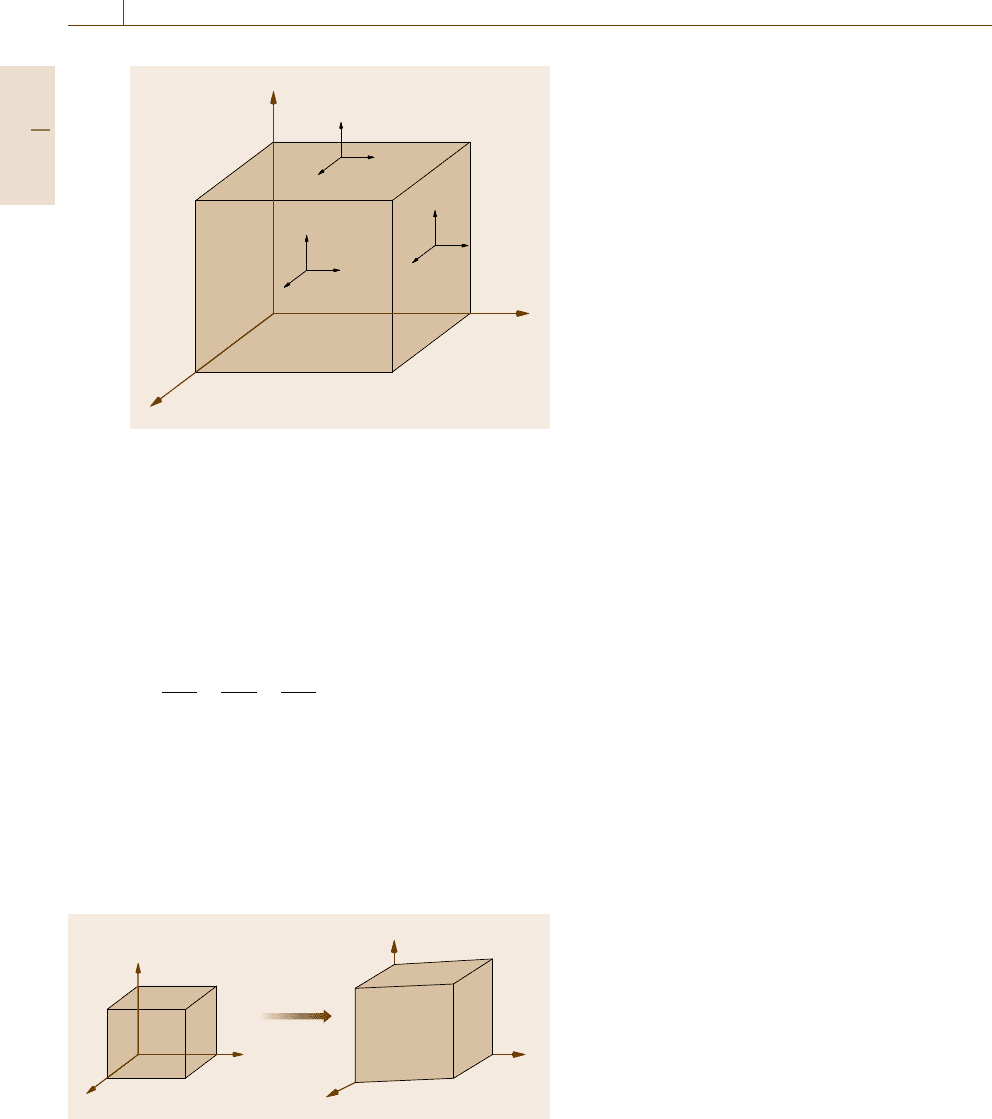
Fig. 7.1 Illustration of the two-index notation of stress.
Stresses on the negative side of the cube have the opposite
direction to those on the front side. Stresses in the figure
are all positive
An example of the stresses oriented around a small
cube is shown in Fig. 7.1. From the fact that the cube is
in equilibrium, the equation of equilibrium can be deter-
mined. Summing up the forces in the x
1
-direction, the
following equation is obtained
∂σ
11
∂x
1
+
∂σ
12
∂x
2
+
∂σ
13
∂x
3
+F
1
=0 , (7.1)
where F
1
are the body forces in the x
1
-direction. Similar
equations are found for the x
2
-andx
3
-axes.
A convenient shorthand representation has been de-
veloped for equations similar to (7.1). The subscripts
of (7.1) are indicated by lower-case letters, usually i, j,
and k. A partial derivative is indicated by a comma; a re-
peated index indicates a summation. Thus, (7.1) can be
3
2
1
3'
1'
2'
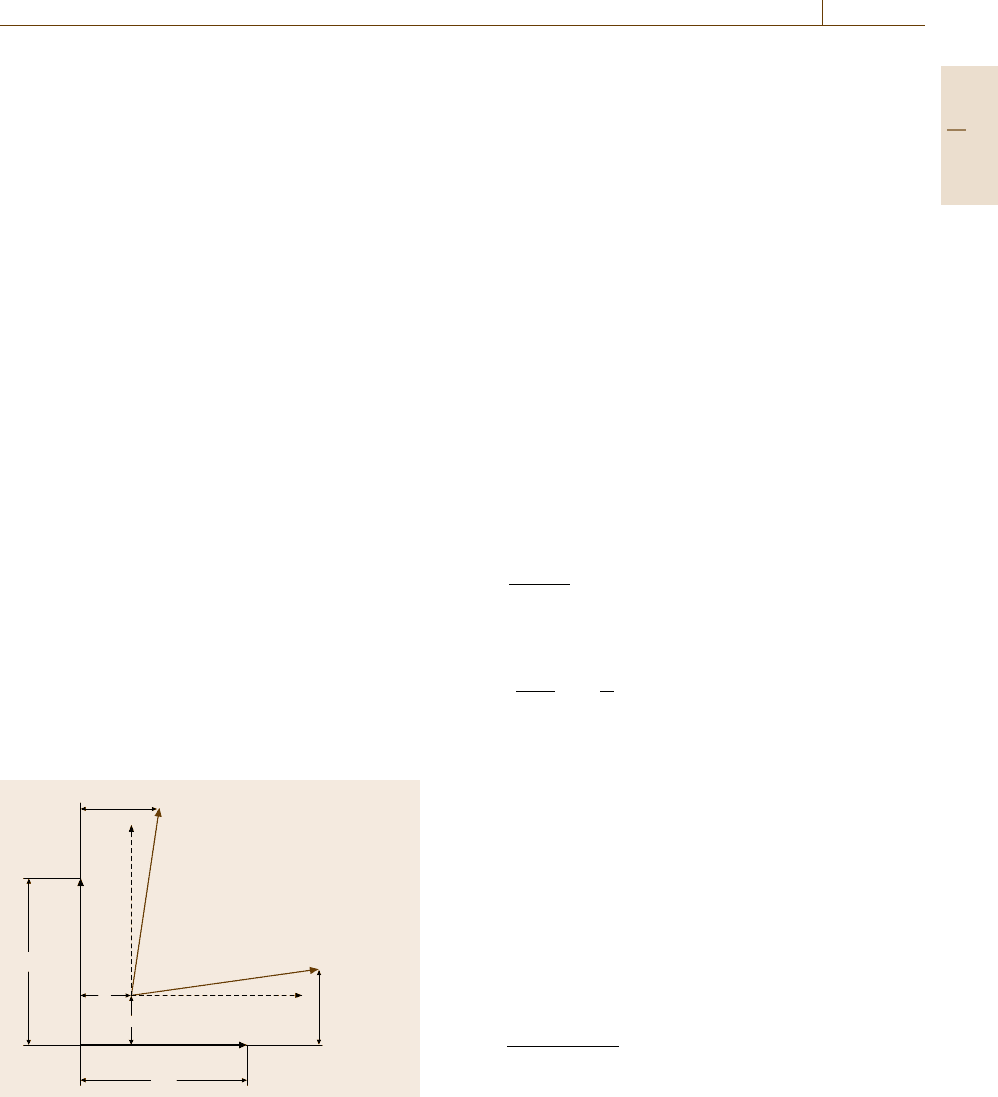
Fig. 7.2 On deformation, the size of the box has increased and the
angles between the sides are no longer right angles, indicating both
a tensile and a shear strain
represented by
σ
ij, j
+F
i
=0 . (7.2)
Assignment of the value of 1, 2 and 3 for i yields three
independent equations for equilibrium. The body forces
F
i
may be constant, or a function of space and time.
The state of equilibrium for the cube in Fig. 7.1 can
also be used to prove that σ
ij
= σ
ji
.Takingthemo-
ment of the forces about a cube corner parallel to the
x
1
-axis, σ
23
σ dx
2
(dx
1
dx
3
) =σ
32
σ dx
3
(dx
2
dx
1
), which
yields σ
23
=σ
32
. Similar equations are obtained around
the x
2
-andx
3
-axis, proving the assertion that σ
ij
=σ
ji
.
Therefore, of the nine possible stress components at any
point within a body that is subjected to external forces,
only six of them are independent.
Strains
Strains are determined by the relative displacements of
points within a body that has been subjected to exter-
nal forces. Imagine a volume within the body that was
a cube prior to deformation, but has now been deformed
into a general hexahedron, the axes of which may not be
of equal length, or the angles between them right angles
(Fig. 7.2). Two types of strain can be defined from this
figure: tensile strain, in which the length of the axes of
the cube have been changed by deformation, and a shear
strain, in which the angle between the axes of the cube
have been changed by the deformation. If u represents
the displacement in the x
1
-direction of any point within
the body due to the application of a set of forces, then
the displacement of an adjacent point a distance dx
1
away from the first in a direction defined by the x
1
-
axis is given by u +(∂u/∂x
1
)dx
1
. The relative change
between the two points in the x
1
-direction is ∂u/∂x
1
,
which is defined as the tensile strain in the x
1
-direction,
ε
11
. Similar definitions are used for the tensile strain
in the x
2
-andx
3
-directions: ε
22
and ε
33
. In this case,
v and w are the displacements in the y-andz-directions,
respectively.
The shear strains are defined by the change in angle
of the cube corners. Projecting the cube onto an x
2
–x
3
plane (Fig. 7.3), the change in the angle of the cube
is given by ∂v/∂x
3
+∂w/∂x
2
, where v and w are the
displacements in the x
2
-andx
3
-direction, respectively.
The strain ε
23
is defined by ε
23
=(∂v/∂x
3
+∂w/∂x
2
)/2.
Similar equations are obtained for ε
12
and ε
13
. As with
the shear components of the stress tensor ε
ij
= ε
ji
,as
can be seen from the definition of shear strain.
Some other properties of stress and strain are com-
mented on without proof. Both stress and strain are
tensor quantities and transform as tensors with the rota-
Part C 7.1
Mechanical Properties 7.1 Elasticity 343
tion of system axes. Consider a transformation of axes
from x
i
, x
j
, x
k
to x
α
, x
β
, x
γ
, then the stresses will
transform according to the following equation
σ
αβ
=l
αi
l
β j
σ
ij
, (7.3)
where l
αi
and l
β j
are the cosines of the angles between
x
α
and x
i
,andx
β
and x
j
, respectively. Once the σ
ij
are obtained at a point for a given set of axes, they can
be obtained for any other set of axes using this simple
transformation.
Stress–Strain Relations
Finally we arrive at the set of equations that relate stress
and strain. Since there are six independent components
to the stress tensor and six independent components to
the strain tensor, there will be 36 constants of propor-
tionality connecting the two
σ
ij
=C
ijkl
ε
kl
. (7.4)
The coefficients C
ijkl
are the elastic stiffness constants.
The repeat of the index kl in the subscripts on the
right-hand side of this equation indicate by convention
a summation over these subscripts for k =1, 2 and 3 and
similarly for l. Thus, for each of the six stress compo-
nents on the left-hand side of the equation, there are six
terms on the right-hand side and six coefficients C
ijkl
.
Of the 36 constants, it can be shown by strain-energy
considerations that only 21 are independent. This num-
ber is reduced further by the symmetry of the solid. For
a cubic material, the number of elastic constants is re-
duced from 21 to three. For an isotropic material, the
v + dv/dx
3
w + dw/dx
2
x
3
dx
3
dx
2
x
2
v
w
Fig. 7.3 As can be seen from the figure, the angle between
the x
2
-andthex
2
-axes is 1/2(dw/ dx
2
+ dv/ dx
3
), as for
the x
3
- and x
3
-axes. This angle is defined as the shear strain
ε
23
=ε
32
(after [7.2])
number of elastic constants is two. Equation (7.4)may
be rewritten so that strain is expressed as a function
of stress, in which case the two tensors are related by
a set of constants S
ijkl
known as the elastic compliances.
The stiffness C
ijkl
and the compliance S
ijkl
are both
fourth-order tensors that depend on the axis orientation
for their values. They both transform as fourth-order
tensors
C
αβγδ
=l
αi
l
β j
l
γ k
l
δl
C
ijkl
(7.5)
with a similar equation for the compliances.
Since most engineering materials are isotropic, it
is worth expanding the stress–strain equation (7.4)into
a form that has more practical significance. The elastic
constants that are most commonly used are the Young’s
modulus E (the ratio of the tensile stress to the tensile
strain), the shear modulus μ (the ratio of the shear stress
to the shear strain), and the Poisson’s ratio ν (the ratio of
the strain parallel to the tensile axis to the strain normal
to the tensile axis). Since only two of these are indepen-
dent for an isotropic material, it can be shown that the
following relationship between the three exists
μ =
E
2(1+ν)
. (7.6)
Strain can be expressed in terms of stress for an
isotropic material, by the following equation
ε
ij
=
1+ν
E
σ
ij
−
ν
E
δ
ij
Θ, (7.7)
where δ
ij
is the Kronecker delta; it equals one for i = j
and zero otherwise. The term Θ is equal to σ
ii
,which
indicates the sum over the subscript (σ
ii
=σ
11
+σ
22
+
σ
33
). When expanded (7.7) yields six equations, one for
each of the strain terms.
A similar equation can be written for stresses in
terms of strains; in which case, the most appropriate
elastic constants are the shear modulus μ and the Lamé
constant λ
σ
ij
=λε
kk
·δ
ij
+2με
ij
. (7.8)
The Lamé constant can be expressed in terms of the
other elastic constants by
λ =
Eν
(1 +ν)(1 −2ν)
. (7.9)
Most of this article deals with the evaluation of Young’s
modulus, the shear modulus, and Poisson’s ratio, since
these are the ones most often used in practical applica-
tions, and hence, are the ones for which the standards
are written.
Part C 7.1
344 Part C Materials Properties Measurement
Linear elastic solutions of boundary problems can
be obtained using the relationships between stress and
strain (7.7) or its inverse (7.8) and the equations of
equilibrium (7.2) subject to the conditions at the bound-
ary. The solutions must satisfy a set of six equations
known as the compatibility relations. These equations
assure that solutions obtained yield valid displacement
fields, i.e. fields in which the body contains no voids or
overlapping regions after deformation.
The experimental configurations normally used to
determine the elastic constants are cylinders of cir-
cular or rectangular cross sections, which are loaded
in tension, flexure or torsion. Under static loading,
elastic moduli are calculated from the load on the spec-
imen, a measurement of specimen displacement and an
elastic solution for the particular specimen. Measure-
ments can also be made by dynamic techniques that
involve resonance, or the time of flight of an elastic
pulse through the material. In general, the static tech-
nique yielded results that are not as accurate as those
obtained dynamically, differing by about −5to+7%
of the mean value of the dynamic technique [7.11].
The difference may be due to a combination of ef-
fects (adiabatic versus isotropic conditions, dislocation
bowing, other sources of inelasticity, and different
levels of accuracy and precision). This is discussed
in Sect. 7.1.4.
In the remainder of this chapter, the techniques for
determining the elastic constants for isotropic materials
are discussed. The most recent ASTM recommended
tests will form the basis of the discussion. The standards
that are currently in use will be described and their ap-
plication to a given material will be discussed. Since
materials have a wide range of values for their elas-
tic properties, given standards are not suitable for all
materials. So, in the course of the discussion, the stan-
dards will be discussed with reference to the different
classes of materials (polymers, ceramics, and metals)
and recommendations will be made as to which tech-
nique is preferred for a given material. The relative error
of each standard measurement will also be discussed
with reference to the various materials.
Although ASTM tests are used in our discussions,
we recognize that these standards are not universal.
Other countries use different sets of standards. Never-
theless, the standards for elastic constants are all based
on the same set of elastic equations and the same physi-
cal principals. So, regardless of which standard is used,
the investigator should obtain identical results within
experimental scatter. Furthermore, the same material
considerations have to be taken into account in es-
tablishing a standard measurement technique. So here
too, the standard tests will have to be similar to ob-
tain a given accuracy. A list of European standards is
given in the appendix for those readers who prefer to
use standards other than ASTM.
Five general tests are used to determine the elas-
tic constants of materials. Tensile testing employing
a static load is used to measure Young’s modulus, and
Poisson’s ratio. Torsion testing of tubes or rods is used
to determine the shear modulus. Flexural testing under
a static load is used to determine Young’s modulus. Var-
ious geometries are used for the flexural tests. Finally,
resonant vibration of long thin plates and the time of
flight of sonic pulses are both used to measure Young’s
modulus and the shear modulus.
7.1.3 Measurement of Elastic Constants
in Static Experiments
In principal the simplest test geometry for determin-
ing elastic constants is the tensile test. A fixed load is
placed on the ends of the specimen and the displace-
ment over a fixed portion of gage section is measured.
The load divided by the cross-sectional area gives the
stress and the displacement divided by the length over
which displacement was measured gives the strain. The
Young’s modulus is then given by the stress divided by
the strain. Often, the Young’s modulus is measured as
part of a test carried out to determine the plastic prop-
erties of the metal. In such a test, a stress–strain curve
is obtained on the metal, and the linear portion of the
curve at the beginning of the test is used to calculate
the Young’s modulus. At the same time, if the lateral di-
mensions of the specimen are measured during the test,
the test results can be used to determine Poisson’s ratio
as a function of strain.
Test Specimens
Tensile tests are generally carried out on a universal
test machine. The precautions needed to achieve high
measurement accuracy include alignment of the test ma-
chine, calibration of the load cell, firm attachment of
the extensometers used to measure strain, and accu-
rate measurement of the dimensions of the specimen
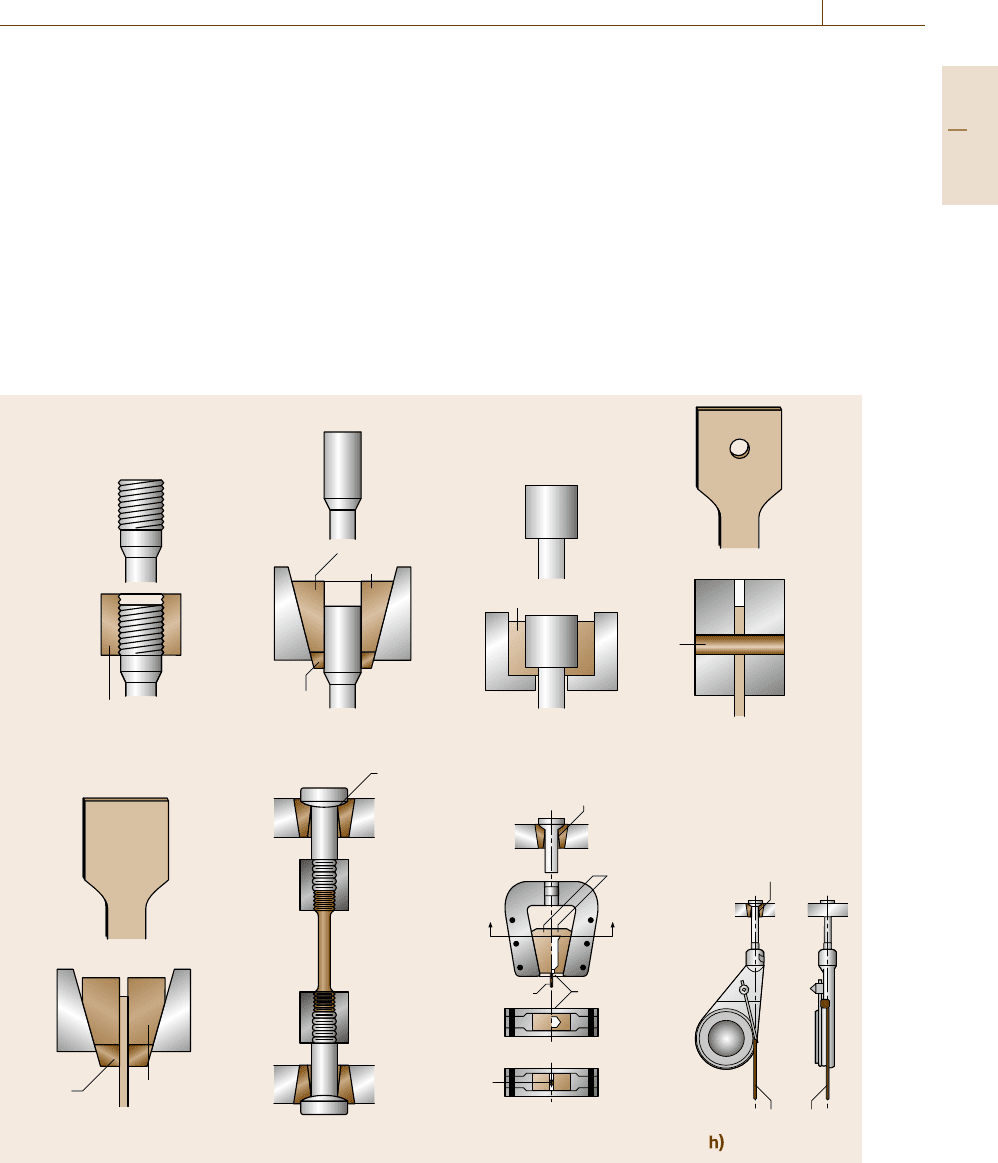
cross section. Examples of specimen types and shapes,
and methods of gripping used in these machines are
showninFig.7.4 [7.12]. The type of specimen depends
on the stock from which the specimen is taken. Sheet
materials are usually tested in the form of flat speci-
mens that are clamped with wedge grips on their ends.
The flat specimens may also be pinned as well as be-
Part C 7.1
Mechanical Properties 7.1 Elasticity 345
ing clamped. Round stock is tested with threaded-end
or shoulder-end specimens that have matching shoul-
ders or threads on the gripping device. Wires are tested
using special snubbing devices in which the wire is
wound around a mandrel to add the load gradually
to the wire and thus prevent stress concentrations that
will reduce the measured strength (in a strength test).
In all specimens but the wires, the gage section is re-
duced to decrease the stress at the gripping points.
Finally, the grips are usually attached to the testing
machine through universal joints that prevent bending
of the specimen during loading. Specific criteria for
specimen dimensions and shapes are given in ASTM
E8[7.12].
Thread grip
Note:
Bad practice
Note:
Bad practice
Serrated
wedges
Outer
holding
ring
Split
collar
Pin
Spherical bearing
Specimen
Specimen
Specimen with
threaded ends
Upper head
of testing
machine
Specimen
Section A–A for wire
Section A–A for sheet and strip
Cylindrical seat
AA
Serrated faces
on grips
Cross-head of
testing machine
Spherical
bearing
Spherical
bearing
Serrated
wedges
a)
e) f) g)
b) c) d)
Fig. 7.4a–h Specimen types and shapes, and methods of gripping specimens in a universal testing machine (after [7.12])
Test Forces
Forces are determined by electronic load cells that at-
tach to the testing machine and these can be calibrated
through dead-weight testing through the use of elastic
proving rings, or by the use of calibration strain-gage
load cells following the recommendations of ASTM
E74[7.13]. To assure that the load cell is operating cor-
rectly calibrations should be done periodically. Proving
rings and load cells are both portable, however the lat-
ter tend to be smaller, especially for large-scale loads
and so are often preferred. Regardless which device is
used, they in turn should be calibrated according to the
procedures in ASTM E 74. The calibration of load cells
on universal test machines should be checked each time
Part C 7.1
346 Part C Materials Properties Measurement
the machine is run, and periodic verifications of the load
system should be carried out using ASTM E4[7.14].
The required practice is to verify the test system one
year after the first calibration and after that a minimum
of once every 18 months.
Strain Measurement
Strain on tensile specimens can be measured by the use
of extensometers that attach directly to the gage sec-
tion of the test specimen, by the use of strain gages
that are mounted directly to the specimen, or by the use
of optical systems, which directly sense the motion of
marks on the gage section or flags attached to the gage
section of the tensile specimen. Clip-on extensometers
have knife-edges that press into the specimen surface
and clearly define the length of the gage section. They
are inherently more accurate than other techniques and
hence are used in standard methods for determining the
elastic constants [7.18].
Two basic kinds of clip-on extensometers are used
to detect strain. One contains a linear variable differ-
ential transformer (LVDT) that moves as a consequence
of specimen deformation and produces an electrical sig-
nal that is proportional to the motion. These are small,
lightweight instruments that have knife-edges to de-
fine the exact points of contact. They can be used over
a wide range of gage lengths (10–2500 mm) and can be
modified to operate over a wide range of temperatures,
−75 to 1205
◦
C[7.18].
The second type of extensometer uses strain gages
to measure the deformation. The strain gage is usually
mounted on a beam within the extensometer that de-
forms elastically as the tensile specimen is deformed.
The strain gage is a wire grid that changes its resis-
tance as the beam is deformed elastically. To detect the
Table 7.1 Standard quasistatic tests for elastic constants
Specification
number
Specification title
ASTM E 111-04
[7.15]
Standard Test Method
for Young’s Modulus,
Tangent Modulus, and Chord
Modulus
ASTM E 132-04
[7.16]
Standard Test Method for
Poisson’s Ratio at Room
Temperature
ASTM E 143-02
[7.17]
Standard Test Method for
Shear Modulus at Room
Temperature
strain, the gage is connected to a bridge that measures
the resistance of the gage. The signal from the bridge is
conditioned and amplified before going to a digital read
out device. Using strain-gage extensometers, the ampli-
fication of the original displacement can be as high as
10 000 to 1 [7.18]. Strain gage extensometers are also
light and are easily attached onto the gage sections with
knife-edge clips.
Strain gages may be attached directly to the gage
section of the test specimen, in which case the strain
measured over a nominal gage length rather than the
more precise length typical of extensometers. Since the
calibration of individual strain gages and the integrity of
their attachment are often deduced by measuring a ma-
terial with a known elastic modulus, strain gages cannot
be used to certify a measurement of elastic modulus.
For noncritical applications, however, they are often the
simplest approach to acquiring elastic properties and
usually provide satisfactory results.
In ASTM E83[7.19], strain extensometers are clas-
sified into six classes according to their accuracy. Only
the three most accurate classes, class A, class B1 and
sometimes class B2, can be used for evaluation of the
Young’s modulus of materials. To evaluate the perfor-
mance of a strain extensometer, verification procedures
have been put forth by various standards organiza-
tions [7.18]. Class A extensometers show the highest
accuracy for strain measurements, but are generally not
available commercially [7.18]. Class B1 extensometers
are available commercially and are the ones most com-
monly used for elastic constant measurement. Class B2
can also be used for elastic constant determination on
plastics, which are high-compliance materials.
Test Procedures
Quasistatic tests to evaluate the elastic constants should
be carried out according to the procedures outlined in
the standard shown in Table 7.1.
These tests vary according to the materials tested
and the constant being determined. For metals the
Young’s modulus is determined by applying a tensile
load to the specimen following the procedure given in
ASTM E 111. The specimen is loaded uniaxially and
strain is obtained as a function of load. Stress is cal-
culated from the load; the linear portion of a plot of
stress versus strain is used to determine the Young’s
modulus. The linear section of the plot is fitted by the
method of least squares and the Young’s modulus is
given by the slope of the plot. The coefficient of de-
termination r
2
and the coefficient of variation V
1
are
reported to give a measure of the goodness of the fit.
Part C 7.1
Mechanical Properties 7.1 Elasticity 347
The test can be carried out either with calibrated dead
weights or, more often, by using a universal test ma-
chine. Class B1 extensometers are specified for the
test, and an averaging extensometer, or the average
of at least two extensometers arranged at equal an-
gles around the test specimen are recommended. The
standard points out that for many materials, Young’s
modulus determined in tension and compression are
not the same, so that separate determinations for each
mode of loading are recommended. Finally, the standard
notes that some materials loaded in the elastic range
exhibit some curvature and so should not be fitted by
a straight line. For these materials, a tangent modu-
lus or a chord modulus are recommended for practical
applications.
The determination of Poisson’s ratio at room tem-
perature is described in ASTM E 132. Tests are carried
out on a universal test machine using the same sort of
specimens described in ASTM E 111. Average longi-
tudinal and transverse strains ε
l
and ε
t
are measured as
a function of applied load P. Two plots of strain versus
load are obtained. The data are fitted to a linear equa-
tion by the method of least squares and the slopes of the
data are determined. Poisson’s ratio ν is calculated from
the ratio of the two slopes
ν =−(dε
t
/dP)/(dε
l
/dP) . (7.10)
As with the standard for determining Young’s modulus,
class B1 extensometers are specified for this test.
The determination of Young’s modulus and Pois-
son’s ratio on polymeric materials differs somewhat
from the same tests carried out on metals. Because
the Young’s modulus of polymers is only one hun-
dredth that of metals, strains are much higher than
those for metals. Hence, class B2 extensometers are
adequate for the determination of elastic constants of
polymers. Also, because of the high degree of sen-
sitivity of many plastics to the rate of straining and
to environment conditions these parameters must be
controlled and specified for each test. Furthermore,
according to statements in ASTM D 638 [7.21], the
standard test method for tensile properties of plastics,
data obtained by this test method cannot be consid-
ered valid for applications involving load time scales
or environments widely different from those of this test
method. In ASTM D 638, tests are carried out on
dumbbell-shaped specimens or on tubes specified. The
test speeds and the test conditions are specified and
the specimen is loaded in a universal test machine.
For polymers that exhibit an elastic region of behav-
ior, calculations for determining Young’s modulus and
Poisson’s ratio are the same as for metals. In case the
material exhibits no elastic behavior, a secant modulus
is suggested to approximate the elastic behavior of the
polymer.
Polymeric sheets are tested in tension according to
the procedures given in ASTM D 882 [7.22]. The mod-
ulus of elasticity determined by this test is an index
of stiffness of the plastic sheet. Specimens are sheets
of polymers at least 5 mm wide, but no greater than
25.4 mm wide. A length of 250 mm is considered stan-
dard. Because of the sensitivity of polymeric sheets
to environment, the sheets have to be conditioned to
the laboratory test environment prior to testing. Strain
rates are specified within the test procedure. The elas-
tic modulus is determined from the linear portion of
the stress–strain curve, or where the curve is nonlinear,
a secant modulus is determined as in ASTM D 638.
The Young’s moduli of ceramic materials, concretes
or stones are not determined in tension. Because of
the high value of the elastic constants and the weak-
ness of these materials in tension, the kinds of loads
needed for accurate strain measurements cannot be ap-
plied without rupture of these materials. The exception
to this statement is the testing of high-strength glass or
ceramic fibers, which tend to be very strong and so,
can be subjected to sufficiently high loads for accu-
rate measurement of displacements. The tensile strength
and Young’s modulus of the fiber are calculated from
load-elongation and cross-sectional-area measurements
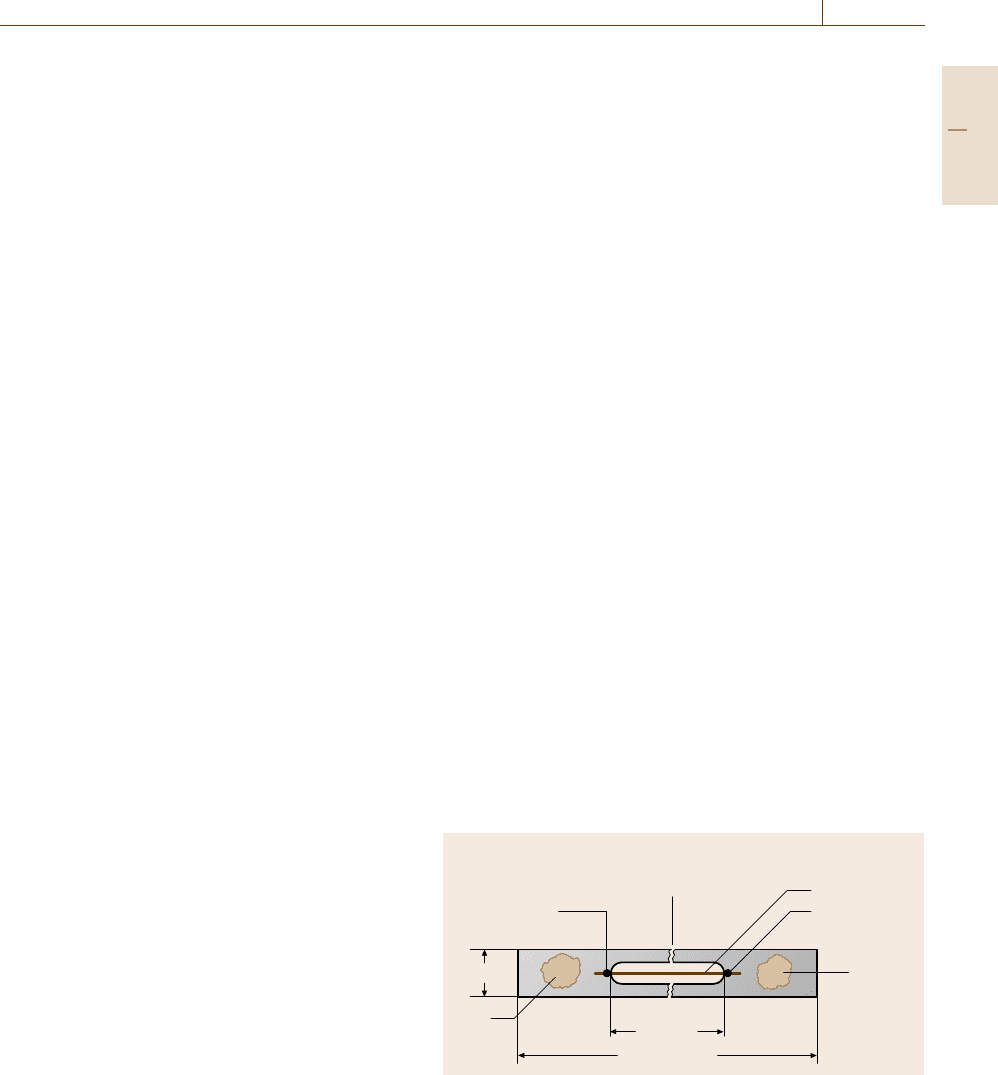
on the fiber. ASTM D 3379-75 [7.20] gives a proce-
dure that can be followed to test ceramic fibers. Fibers
are glued onto a mounting tab that is gripped by the
test machine (Fig. 7.5). As shown in the figure, the gage
length is set by the tab. After the specimen has been
This section burned or cut
away after gripping in
test machine
Cement or wax
Cement or wax
Test specimen
Width
Grip
area
Grip area
Gage
length
Overall length
Fig. 7.5 Method of mounting high-strength ceramic fibers onto
a universal testing machine. The fibers are glued onto a mounting
tab that is gripped by the test machine. After the specimen has been
mounted in the test machine, a section of the tab is cut or burned
away, leaving the specimen free to be tested (after [7.20])
Part C 7.1