Цыпкин Я.З Основы теории автоматических систем
Подождите немного. Документ загружается.

432 ОПТИМАЛЬНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ [ГЛ. 31
—
определитель Мизеса для уравнения
М»-0,
(31.21)
a
As+i
—
определитель,
получающийся из
A
s
+i
заменой первой
строки на
Zgt,
2Eftg
/
+ 1
,
...,
2(gogs-i
+
gigs),
Zgogs).
(31.22)
-0
*=0
/
Выражения / для
g
8
= О и
s
==
1, 2, 3 приведены в табл. 31.1.
Чем меньше при данных значениях параметров неизменной ча-
сти величина /, тем выше качество импульсной системы.
§
31.3. Оптимальные параметры систем
В общем
случае
показатель оптимальности / является функ-
цией
неких конкретных параметров системы. Обозначим их че-
рез
c
v
,
v = 1, 2,
...,
ЛЛ
Тогда
1
=
1
(с
и
...,
c
N
).
(31.23)
Оптимальные параметры соответствуют таким значениям
c
v
— с*,
при
которых / достигает минимума. Предположим, что мини-
мум /
существует
и он единственный. Часто это предположение
вытекает из физических соображений. В этом
случае
условие ми-
нимума получается приравниванием частных производных / по
Си
• • •,
CN
нулю, т. е.
i£fc^
= Oi
v=l,2,
....
ЛГ.
(31.24)
Вводя обозначение градиента
(^I
^f>
(31-25)
условие
(31.24)
можно записать в векторной форме:
W(£?)
= 0,
(31.26)
где
с =
(си
С2у
...,
c
N
)—
вектор параметров. Решение уравнения
(31.26)
и определяет оптимальные параметры системы.
§
31.4. Оптимальные характеристики
Найдем оптимальную характеристику ЦВУ
W*
K
(p),
опреде-
ляющую закон управления, при котором достигается минимум
показателя качества вида
t
(31.27)
где
е
х
{тТ)
= х
(пгТ)
-
х*
{шТ)
(31.28)
§
31.4]
ОПТИМАЛЬНЫЕ ХАРАКТЕРИСТИКИ 433
— отклонение ошибки от вынужденной и
е
и
(тТ)
= и
(пгТ)
— и*
(пгТ)
(31.29)
—- отклонение управления от вынужденного. Будем предпола-
гать, что неизменная часть устойчива или нейтральна. Согласно
формуле Парсеваля (31.13) имеем
Сйо/2
=
i
S
{|£;(/со)|
2
+
Я2|£;(/с0)|
2
}Ж»,
(31.30)
~©о/2
где
Е*
х
(]®)
и
Е*
и
(/со) — спектры отклонений ошибки и управляю-
щего
воздействия.
Предположим для простоты, что как выну-
жденная ошибка
х
в
(тТ)
1
так и вынужденное управление равны
нулю:
х
в
(
тГ
)
=
и*
(тТ)
=
0. (31.31)
Тогда
е^
(тГ)
=
дс
(тТ),
г
и
(пгТ)
— и
{тТ),
Поэтому вместо (31.30) получаем
оо
/
=
£
[х
2
(щТ)
+
Ъ
2
и
2
{тТ)\
=
|
ДГ
(/«о)
р
+
Я.
2
|СГ
(/«>)
Р>
г/ш,
(31.32)
~-©о/2
где
X*(j(o)
и
С/*
(Ы
— спектры ошибки и управляющего воздей-
ствия.
Но согласно структуре системы
X* (/со) = [1 -
К*
(/со)] F* (/со) (31.33)
(31.34)
Поэтому (31.32) можно представить в виде
G)o/2
-COg/2
ш.
(31.35)
434
ОПТИМАЛЬНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ [ГЛ 31
Вводя обозначения энергетических спектров внешнего воздействия
S;
f
(co)
=
|r(/(o)|
2
(31.36)
и
приведенного управляющего воздействия
р
*
(/со)
(31.37)
Г*
(/со)
запишем
показатель оптимальности окончательно в виде
(йо/2
if
-Оо/2
Если
в
(31.38)
подставить значения энергетических спектров
(31.36), (31.37), то мы придем к выражению (31.18), которое
было использовано для определения оптимальных параметров.
Для получения реализуемой характеристики можно было бы
поступить аналогично
тому,
как это было сделано в гл. 13 для
непрерывных систем. Однако такой
подход
не обеспечивает не-
которых дополнительных условий работоспособности импульс-
ной
системы. Поэтому изложим иной путь, который позволяет
эти
условия учесть.
Чтобы удовлетворить условию (31.31), предположим, что зна-
менатель изображения входного воздействия
В*(р)
содержится
в
знаменателе передаточной функции объекта
Q*(p)
9
т. е.
Q*
(р) = В* (р) •
Q*
(р).
(31.39)
Воспользуемся теперь соотношениями для допустимой пере-
даточной функции (30.18), (30.19), положив в них
s
0
= 0,
Q*__
(p)
=
1и
дополнив последнее требованием нулевой вынужден-
ной
ошибки
(31.31)
при отслеживании воздействия с изображе-
нием
F* (р) =
д,
,
р
, :
К*(Р)
=
L,*\
Р
*
(31.40)
Здесь
Р*
(р) — числитель передаточной функции объекта, G* (р) —
характеристический многочлен замкнутой системы,
М*
к
(р) и
N*
K
{p)
— неизвестные многочлены, удовлетворяющие полиномиаль-
ному уравнению
Р*
(Р)
М;
(р) + В* (р)
N1
(р)
=
G*
(р).
(31.42)
§
31.4]
ОПТИМАЛЬНЫЕ ХАРАКТЕРИСТИКИ
435
В выражении
(31.41)
сомножитель
В*(р)
обобщает введенное
ранее
в
(30.28)
требование астатизма
v-ro
порядка.
Определение оптимальной частотной характеристики
К*(/со)
сводится
к
решению вариационной задачи
—
минимизации
/ при
учете
условий работоспособности замкнутой системы.
Для
этой
цели нужно
в
выражение
(31.38)
вместо
К*(/со)
подставить
/С*
пт
(/со)
+
т]
6/С*
(/со),
где
г|
—
произвольная постоянная,
а
6^*
(/со)—
вариация частотной характеристики, взятая
в
соот-
ветствии
с
(31.40)
при р =
/со. Тогда
/
будет
функцией пара-
метра
г].
Эта
функция достигает минимума
при
ц
= 0, т. е. при
/С*
(/со)
=
/Сопт(/©).
Следовательно,
при
г)
= 0
61
=
\4Ц
=0.
(31.43)
Подставляя сюда выражение
/
из
(31.38), получим условие
ми-
нимума
/ в
виде
coo/2
67
=
"^
°~(Оо/2
соо/2
(
~
/со)
s
*u
(
ш
)
-
0
- ^
(-
/®))
sl
f
((o)}6K4h)
rfco
-
о,
которое,
в
силу сопряженности подынтегральных выражений,
переписывается
в
виде
соо/2
67
—k
S
Юо/2
-
(1 -
/Г
(/со))
S;
f
(со)}
6Г
(- /со)
dco
=
0.
(31.44)
Вводя
обозначение
s»
=
s;
f
(co)
+
s;»
(
(31.45)
из (31.44)
получаем
(Во/2
-J-
J
{r(/«)S>)-S;
f
H}d/C(-/co)dco
= 0.
(31.46)
0
-С0./2
Запишем
интеграл
(31.46) через переменную
р
=
/со,
учтя, что
Г,
2
Г{р)Г(-р)
1
(3L47)
(3L48)
436 ОПТИМАЛЬНЫЕ ИМПУЛЬСНЫЕ
СИСТЕМЫ
[ГЛ. 31
где
G]{p)
определяется уравнением
G\
(p)
G[
(-
р)
=
Р*
(р)
Р*
(-
р)
+
W
(p)
Q*
(-
р).
(31.49)
Поскольку
в подынтегральном выражении
(31.46)
степень
числителя ниже степени знаменателя, то интегрирование по пря-
мой
от
—/-у-
ДО
+/-у-
на плоскости р можно заменить инте-
грированием по контуру
L,
охватывающему
левую
полуполосу:
(31.50)
Интеграл
(31.50)
равен нулю, если его подынтегральное выра-
жение не содержит левых полюсов. Это условие определяет
выбор оптимальной передаточной функции
К*(р).
Учитывая (31.40), подынтегральное выражение из
(31.50)
можно переписать в виде
\*(
р
*
(р) М
*
{р) G
*
1 (р)
G
*
(
~
р)
~
G
*
{р) Р
*
{р)
Р
*
(
~
р)
у
Д
[Р)
~
G>
(р) Р* (р)
Р*
(- р)
х
Яй^
р)
-
(3L51)
Выражение
(31.51)
позволяет просто найти характеристический
многочлен G*(p) замкнутой оптимальной системы При этом по-
требуем, чтобы характеристический многочлен G*(p) не зависел
от вида числителя
А*(р)
изображения входного воздействия.
Другими словами, свойства замкнутой системы не должны зави-
сеть от начальных условий входного воздействия, т. е, система
будет
оптимальной не для воздействия данного вида, а для
класса воздействий, характеризуемых одинаковыми знаменате-
лями
их изображений. Это требование означает запрет на со-
кращение
в
(31.51)
числителя А*(р) изображения входного
воздействия с сомножителями многочлена
G*(p).
Если такого
требования не наложить, то замкнутая система может
даже
не
оказаться устойчивой. Так, для сигнала, растущего с постоян-
ным
ускорением, замкнутая система в этом
случае
получилась
Т
2
е
РТ
(е
РТ
4-
1)
бы
на
границе устойчивости, поскольку
F*(p)
=
)~±^~
р
)
т
—±^
2
\е
1)
и
характеристический многочлен приобретает сомножитель
Конечно,
указанное ограничение, обеспечивающее работоспо-
собность системы, вместе с ограничениями (31.40),
(31.41)
уве-
личивает наименьшее значение функционала / по сравнению со
§
314]
ОПТИМАЛЬНЫЕ
ХАРАКТЕРИСТИКИ
437
случаем, когда эти ограничения
отсутствуют.
Покажем теперь,
что если выбрать
где
G\(p)
определяется уравнением (31.49), то все полюсы
выражения (31 51)
будут
правыми. Для этого, используя замену
S*
f
(со) =
S*
(со) —
S*
m
(со), перепишем подынтегральное выражение
из
(31 46) в ином виде, содержащем 1 —
/С*(/<о):
Л* (/со) =
{Sl
u
(со) - (1 -
К
(/со))
S\
f
(со)}
6Г
(-
/со).
Полагая
здесь /со = р, принимая во внимание
(31.47)
и заме-
чая,
что
1
is*
t*л
Б*
(р) N* (р)
1
—
А
(р) = ~—
G
*
(р)
получим
_
Я,У
(р)
Q*
(-
р)
С7
%
(Р) -
В*
(р)
N*
(p)
G\
(p)
Q]
(-
р)
' (-
р)
бГ
,_ ,
'(-р)
°
А
[ Р)
(-
Р)
-
iv*
(р)
р;
(-
G*
(р)
Р*
(р)
Р*
(-
р)
В последнем преобразовании использованы условия (31.39),
(31.52). Приравнивая числители выражений
(31.51)
и
(31.53)
при
G*(p)
=
G\(p),
получаем, что числитель
(31.51)
предста-
вим
в виде произведения четырех сомножителей
Г
(р)
G\
(p)
(Ml
(р)
О]
(- р) - Р* (- р))
=
=
В*
(р)
G\
(P)
(A
2
Q;
(P)
Q*
(- Р) - N* (p)
G]
(- р)) =
=
P*(p)B*(p)G\(p)L*(p),
(31.54)
где
L*(p)—некоторый
многочлен. При записи последнего равен-
ства предполагалось, что В*(р) и Р*(р) не имеют общих сомно-
жителей. Если учесть, что при фиксированном
G(p)=
Gi(p)
ва-
риация
равна
438 ОПТИМАЛЬНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ [ГЛ.
31
то убеждаемся,
что все
полюсы выражения
P*(p)B*{p)G\{
P
)L*(p)A*(p)A*(-p)
xtrt
. .
Л {Р) ЬК (р)
\i
)
P*
(
)P\)B\
)
B'
Л {Р)
G\i
P)
P*
(
p)P\-
P
)B\
p)
B'
{
-
P
)
ЬК (р)
-^fm^^i-P)
01.55)
— правые.
Это и
доказывает оптимальность передаточной
функции
Р'(Р)М*
К
(Р)
К
™
{р)=
GUP)
'
где
G^ip)
и
М*(р)
определяются соответственно уравнениями
(31.49)
и
(31.42)
при
G*(p)==
Gj(p).
Оптимальная передаточная
функция
последовательного управляющего устройства вычисля-
ется обычным образом:
W
(
П
\
<ПТ(Р)
Q*(P)M*
K
(
P
)
С
учетом (31.39),
(31.40)
при
р =
/со
и
(31.46)
выражение
для
минимального значения функционала
(31.38)
можно предста-
вить
в
виде
Ш./2
*
(/©)
=
-J-
J
(|
iV*
(/со)
I
2
+
Я
2
1M*
(/со)
Q,
(/со)
|
Задачи
31.1.
Показать,
что
суммарная
квадратическая
ошибка
импульсной
си-
стемы
/=
Z
[f
(mT)
-
z
(тТ)}\
передаточная функция которой равна
kT
{\
-
е~
т
^)
е*
т
представим
а
в
виде
/=ЯК
8
(/е
гр
—
k)k
'
Т
где
k
rp
—
2
cth -^~ .
Исследовать зависимость
/ от
к.
Показать,
что /
достигает минимума
при
6=
1
-f
e~
TITx
.
ЗАДАЧИ
439
31.2. Показать,
что
суммарная квадратическая ошибка импульсной
си-
стемы рассмотренной
в
задаче
25.2, равна
/==
(2k
1
T-k
2
T
2
)(2-k
l
T)
при
скачкообразном входном воздействии
и
равна
k
2
T
2
(2kiT
—
k
2
T
2
)
(2 -
kj)
при
линейном входном воздействии.
Исследовать поведение
/ в
плоскости
{k\T
y
k
2
T).
Найти оптимальные
па-
раметры
к\
и
к
2
для
заданного
Т,
при котором
/
минимально.
п
г(тТ)
ГФ)
Рис.
31.1.
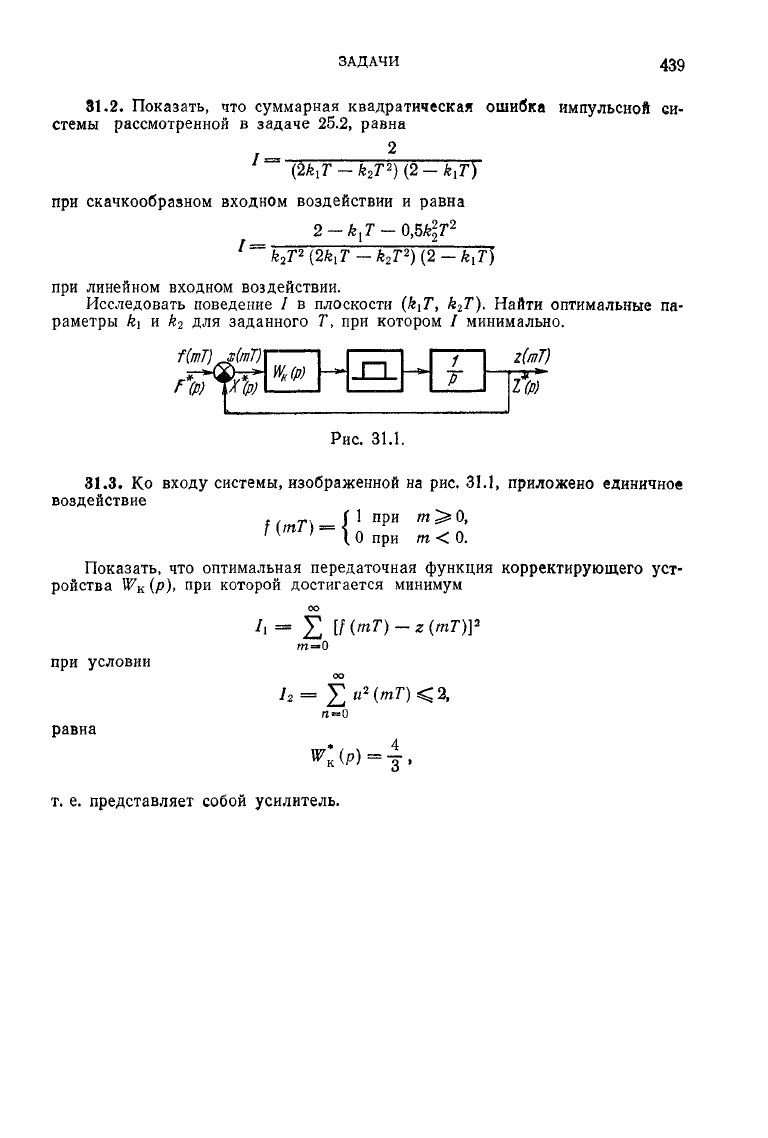
31.3.
Ко
входу
системы, изображенной на рис.
31.1,
приложено единичное
воздействие
при
m
^ О,
при
m < 0.
Показать,
что
оптимальная передаточная функция корректирующего
уст-
ройства
W
K
(/?),
при которой достигается минимум
=
У
U(mT)-z(mT)V
при
условии
равна
Т.
е.
представляет собой усилитель.
Глава
32
СТОХАСТИЧЕСКИЕ
ПРОЦЕССЫ
§
32.1.
Статистические
характеристики
импульсного
элемента
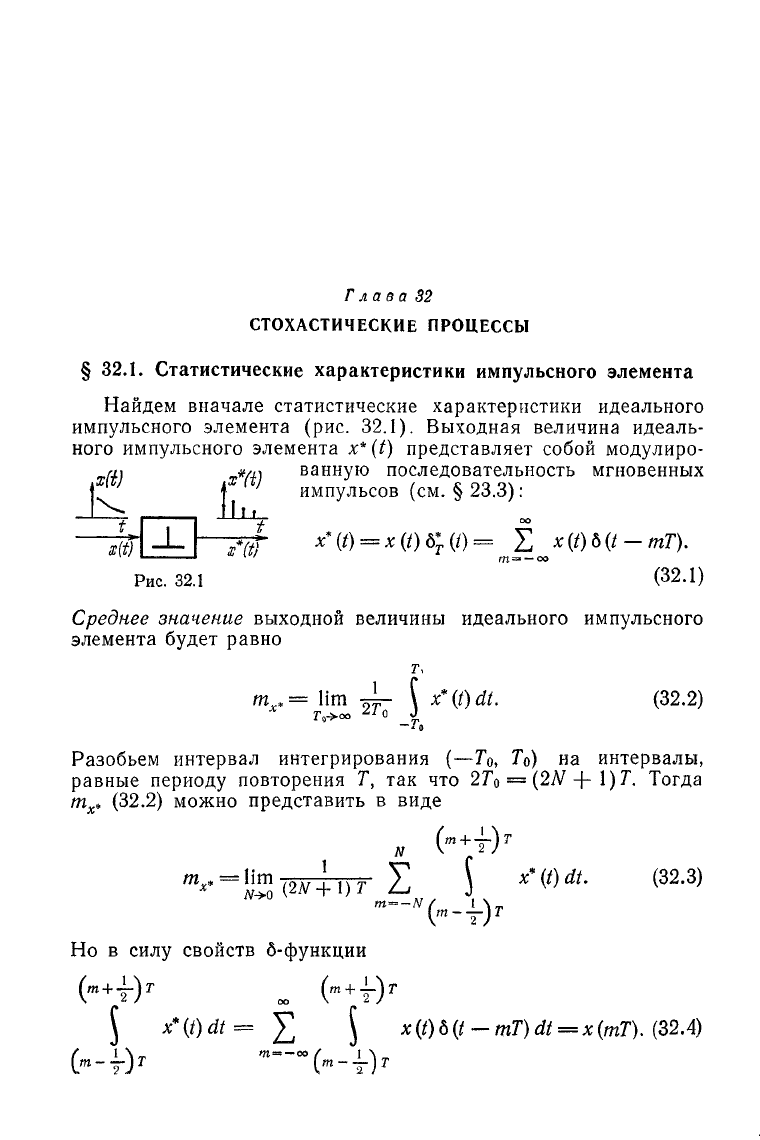
Найдем вначале статистические характеристики идеального
импульсного элемента
(рис.
32.1). Выходная величина идеаль-
ного импульсного элемента х* (t) представляет собой модулиро-
ванную последовательность мгновенных
импульсов (см. § 23.3):
x*
(t)
=
x (t)
6*
(/)
=
2Li
x(t)6(t
— mT).
Рис.
32.1 (32.1)
Среднее
значение
выходной величины идеального импульсного
элемента
будет
равно
г,
т
=
Нт
^г-
\
x*(t)dt.
(32.2)
0
-Го
Разобьем интервал интегрирования (—Го, Го) на интервалы,
равные периоду повторения Г, так что
2Г
0
= (2N
+
1)^\
Тогда
т„*
(32.2) можно представить в виде
Но
в силу свойств
б-функции
x*{t)dt=
^
J
Ж(/)4(/
—
«Л
Л
=
х(тТ).
(32.4)
§
32 1] ХАРАКТЕРИСТИКИ ИМПУЛЬСНОГО ЭЛЕМЕНТА 441
Следовательно, среднее значение выходной величины идеального
импульсного элемента определяется выражением
N
Найдем
взаимную
корреляционную
функцию
выходной
и
входной
величин
идеального импульсного элемента. Согласно
определению
R
x
,
x
(
Т
)
=
М
{х*
(0
х (t + т)}, (32.6)
или
л
(т)
=
Iim
-sjr-
?
x*
(t)
x(t
+
%)
dt.
(32.7)
7V
Zi
0
J
!
О
-Г,
Подставим в правую часть (32.7) х*
(I)
из (32.1). Производя
преобразования,
аналогичные проделанным выше, используя
вместо (32.4) равенство
получим выражение взаимной корреляционной функции
выход-
ной
и входной величин идеального импульсного элемента:
L
J
т).
(32.9)
Для определения взаимной спектральной плотности восполь-
зуемся соотношением
(14.32)
при у =
х*:
(32.10)
Запишем
i?
x
**
(т) (32.9) в равносильной форме:
т),
(32.11)
ЛГ->оо