Chattaraj P.K. (Ed.) Quantum Trajectories
Подождите немного. Документ загружается.


21
Direct Numerical
Solution of the Quantum
Hydrodynamic Equations
of Motion
Brian K. Kendrick
CONTENTS
21.1 Introduction.................................................................................................325
21.2 The Quantum Hydrodynamic Equations of Motion ...................................328
21.3 The MLS/ALE Method...............................................................................329
21.4 Example Scattering Problems Using the MLS/ALE Method.....................331
21.4.1 One to Four-Dimensional Scattering Off an Eckart Barrier .........331
21.4.2 One-Dimensional Scattering Off a Rounded Square Barrier........334
21.4.3 DynamicalApproximations for Treating Quantum Many-Body
Systems.........................................................................................337
21.5 The Iterative Finite Difference Method ......................................................339
21.6 Concluding Remarks and Future Research.................................................342
Acknowledgments..................................................................................................343
Bibliography ..........................................................................................................343
21.1 INTRODUCTION
The quantum hydrodynamic formulation of quantum mechanics is intuitively appeal-
ing [1–7]. The quantum potential (Q) and its associated force f
q
=−∇Q appear
on an equal footing with the classical potential and force in the equations of motion.
Thus, this approach provides a unified computational method for including both clas-
sical and quantum mechanical effects in a molecular dynamics (trajectory based)
calculation. However, despite their deceptively simple form, the quantum hydrody-
namic equations of motion are very challenging to solve numerically. The quantum
potential is non-local (i.e., the trajectories are coupled) and it is a non-linear func-
tion of the density (i.e., it depends upon the solution itself). Thus, unlike a typical
classical potential, the quantum potential is manifestly time dependent and evolves
in “lock-step” fashion with the dynamics. Furthermore, the quantum potential can
325
326 Quantum Trajectories
often become singular when “nodes” occur in the quantum mechanical wave func-
tion. The problematic nodes are often associated with quantum interference effects
due to the reflected components of the wave function scattering off a potential barrier.
Despite these formidable challenges, significant progress has been made in recent
years addressing each of the issues mentioned above.
The direct numerical solution methods can be split into three categories based
on the underlying reference frame: (1) Lagrangian, (2) Eulerian, and (3) Arbitrary
Lagrangian–Eulerian (ALE). The first successful direct numerical solution method
for solving the quantum hydrodynamic equations, called the Quantum Trajectory
Method (QTM), was based on the Lagrangian frame of reference [8]. One advantage
of the Lagrangian frame is the simplified equations of motion due to the computational
grid moving with the fluid flow. Another advantage is the grid being optimal. That is,
the grid points move with and follow the time evolution of the density so that there are
few wasted grid points located in regions where the density is small or zero. However,
there is a significant disadvantage associated with using a Lagrangian frame. As time
evolves, the grid becomes highly non-uniform which makes an accurate evaluation
of the numerical derivatives difficult. Unfortunately, the grid often becomes sparse
in precisely the regions where more grid points are needed for accurate calculations
(i.e., near impending node formation) [9]. The Eulerian grid has the advantage of
using a fixed grid that does not change with time. Thus, the grid remains uniform
as time evolves and the sparsity of grid points near nodes is avoided. Unfortunately,
the number of grid points is typically much larger since the entire computational
domain must be gridded and included in the calculations from the beginning. However,
in practice, the Eulerian grid size problem can be mitigated by “deactivating” grid
points with small density and then “activating” them as the density increases above
some user specified threshold during the calculation (some care is required in order
to ensure continuity in the solutions when initializing all of the field values at the
newly activated grid points). As the name implies, the ALE frame combines the best
properties of both the Lagrangian and Eulerian frames of reference [10]. An ALE
frame can be constructed which follows the flow of the fluid while preserving a
uniform grid spacing. By implementing automatic grid refinement, a nearly constant
user specified grid spacing can also be maintained [11].
Within each of the three frames of reference discussed above, a given numerical
approach can be further subdivided into its method for evaluating derivatives and
propagating in time. One of the most successful methods for evaluating derivatives
within the quantum hydrodynamic approach is the meshless Moving Least Squares
(MLS) method [8, 11]. This approach has been most successful due largely to its
“noise filtering” properties. In the MLS approach, the derivatives of a field are simply
the coefficients of a local polynomial fit to the field values within some local radius of
the desired evaluation point. The local least squares fitting tends to average out any
noise or numerical errors which may be accumulating in the solution which helps to
stabilize the calculations. On the other hand, the filtering also reduces the resolution
or fidelity of the calculations. Unfortunately, the accuracy, stability, and convergence
properties of the MLS approach are not well understood which can make it difficult
to use in practice. Furthermore, the derivatives are not strictly continuous due to the
different local neighborhoods used at each evaluation point. Also, the computational
Numerical Solution of the Quantum Hydrodynamic Equations 327
overhead associated with performing repeated local least squares fits often becomes
significant. Mesh based approaches can also be used for evaluating derivatives such
as finite differences and finite elements. The advantages of finite differences include
ease of implementation, computational efficiency, higher resolution/fidelity, and con-
tinuous derivatives (to some specified order). The accuracy, stability and convergence
properties of finite difference approximations are much better understood relative to
the meshless MLS approach. Until recently, finite difference based approaches for
solving the quantum hydrodynamic equations of motion have been plagued with insta-
bilities. These instabilities have recently been shown to originate from the negative
diffusion terms associated with the truncation error of a finite difference approxima-
tion to the quantum hydrodynamic equations [12]. By deriving the explicit analytic
form of these negative diffusion terms, a stabilizing positive diffusion term can be
introduced (called “artificial viscosity”) which is of the same order as the errors asso-
ciated with the finite difference approximation [13]. Thus, the stability of the method
can be maintained as the resolution of the calculation is increased.
In any computational method, there are always inherent numerical approximations
such as: grid spacing, time step, polynomial basis set size, etc. We refer to these as
“numerical approximations.” Other kinds of approximations which simplify or reduce
the computational complexity of the original dynamical equations can also be made
such as: incompressible flow, decoupling approximations (i.e., ignoring certain cou-
pling terms), etc. We refer to these as “dynamical approximations.” The difference
between the numerical and dynamical approximations is that the errors associated
with the numerical approximations can be reduced (via grid refinement for example)
to any desired level, whereas the errors associated with a dynamical approximation
are always present (since the original equations have been modified). In practice,
a combination of both numerical and dynamical approximations is usually required
in order to obtain a computationally feasible method (especially for systems with
many degrees of freedom). In this work the focus will be primarily on the numerical
approximations but a few dynamical approximations will be discussed as well.
The relevant hydrodynamic equations of motion are introduced in Section 21.2. A
meshless numerical solution method based on an ALE frame of reference and MLS
fitting will be reviewed in Section 21.3. This method employs automatic grid refine-
ment, field averaging, and artificial viscosity in order to obtain accurate and stable
propagation for long times. The results of example calculations for a one- and two-
dimensional (2D) Gaussian wave packet scattering off an Eckart potential barrier
will be presented in Section 21.4.1. A generalized artificial viscosity algorithm will
be reviewed in Section 21.4.2. This method is based on “dynamic” artificial viscos-
ity coefficients which increase and decrease automatically depending upon the local
strength of the quantum force (i.e., near impending nodes). The results of a challeng-
ing example calculation using this approach to treat a quantum resonance will be
presented. A dynamical approximation (the Vibrational Decoupling Scheme [VDS])
will be reviewed in Section 21.4.3. In this approach, the trajectories associated with
bound vibrational degrees of freedom are decoupled which allows for linear scaling
of the computational cost. Scattering results will be presented for an N -dimensional
Gaussian wave packet tunneling through an Eckart barrier along a reaction path cou-
pled to N − 1 harmonic oscillator (bath) degrees of freedom (for values of N up to
328 Quantum Trajectories
N = 100). The recently developed Iterative Finite Difference Method (IFDM) will be
reviewed in Section 21.5. This grid based approach is a promising alternative to using
a meshless MLS method for evaluating derivatives. The numerical errors and stability
properties of the IFDM are better understood and controllable. One-dimensional scat-
tering results based on the IFDM will be presented. Concluding remarks and future
research directions will be summarized in Section 21.6.
21.2 THE QUANTUM HYDRODYNAMIC
EQUATIONS OF MOTION
In the de Broglie–Bohm approach, the wave function is written in polar form
ψ(r, t ) = R(r, t) exp(iS(r, t)/) where R and S are the real-valued amplitude and
action function. Substituting this expression for ψ into the time dependent Schrödinger
equation and separating into real and imaginary parts gives rise to the following two
equations [1–7]
∂ρ(r, t)
∂t
+∇·
ρ
1
m
∇S
= 0 , (21.1)
−
∂S(r, t)
∂t
=
1
2m
|∇S|
2
+ V (r) + Q(r, t) , (21.2)
where the probability density ρ(r, t) ≡ R(r, t )
2
, m is the mass, and V is the interaction
potential. The velocity and flux are defined as v(r, t) =∇S/m and j = ρ v, respec-
tively. Equation 21.1 is recognized as the continuity equation and Equation 21.2 is
the quantum Hamilton–Jacobi equation. Equation 21.2 is identical to the classical
Hamilton–Jacobi equation except for the last term involving the quantum potential
Q which is defined as
Q(r, t ) =−
2
2m
1
R
∇
2
R =−
2
2m
ρ
−1/2
∇
2
ρ
1/2
. (21.3)
Equation 21.3 shows that Q depends upon the shape or curvature of ψ, and that it can
become singular whenever R → 0. The quantum potential gives rise to all quantum
effects (i.e., tunneling, zero-point energy, etc.). Numerically it is more efficient to
work with the C-amplitude given by R = e
C
. In terms of C, Equation 21.3 becomes
Q =−
2
2m
(∇
2
C +|∇C|
2
) . (21.4)
The total time derivative in an ALE frame of reference is d/dt = ∂/∂t +
˙
r ·∇
where the grid point velocity
˙
r is not necessarily equal to the flow velocity v.Inan
ALE frame of reference and using ρ = e
2C
, Equations 21.1 and 21.2 become
dC(r, t)
dt
=−
1
2
∇·v + (
˙
r −v) ·∇C , (21.5)
dS(r, t)
dt
= L
Q
+ (
˙
r −v) · (mv) , (21.6)

Numerical Solution of the Quantum Hydrodynamic Equations 329
where L
Q
is the quantum Lagrangian defined as
L
Q
=
1
2
m|v|
2
− (V (r) +Q(r, t)) . (21.7)
Taking the gradient of Equation 21.2 leads to the familiar equation of motion which
in an ALE frame is given by
m
dv
dt
=−∇(V + Q) +(
˙
r −v) · (m∇v) . (21.8)
The Lagrangian and Eulerian frames correspond to the special cases
˙
r = v and
˙
r = 0, respectively. Equations 21.5 through 21.8 constitute a set of non-linear cou-
pled hydrodynamic (fluid like) equations which describe the “flow” of the quantum
probability density. The flow lines of this “probability fluid” correspond to the quan-
tum trajectories which are obtained by solving the equation
˙
r = v. The quantum
potential is a non-local interaction which couples these trajectories. If the quantum
potential is zero, then these trajectories correspond to an uncoupled ensemble of
classical trajectories. A solution to the set of Equations 21.5 through 21.8 is com-
pletely equivalent to solving the time dependent Schrödinger equation. However,
despite their relatively simple appearance, these equations are notoriously difficult
to solve numerically. Any small numerical error in computing the spacial derivatives
can become quickly amplified as these equations are propagated in time. Most of the
numerical problems can be traced to the non-linear dependence of Q on C given by
Equation 21.4.
21.3 THE MLS/ALE METHOD
In this section we review the MLS/ALE method for solving the quantum hydrody-
namic equations of motion [11].This approach uses the MLS algorithm for computing
derivatives and an ALE reference frame [10]. The probability fluid is discretized into
n computational particles or fluid elements so that the amplitude C
i
, action S
i
, flow
velocity v
i
, and grid points r
i
are labeled by i = 1, ...,n. Once the initial conditions
at time t are specified for all of these fields at each value of i, the coupled set of quan-
tum hydrodynamic Equations 21.5 through 21.8 are propagated to time t +∆t using
a fourth-order Runge–Kutta time integrator. All of the fields and their derivatives
which appear in these equations are evaluated using a fourth-order MLS algorithm
(see Ref. [11] for more details). The solutions are monitored for convergence as
the grid spacing and time step are decreased. Special attention must be paid to the
“radius of support” in the MLS algorithm. The radius of support defines a spherical
neighborhood around a given evaluation point. All points within this local spherical
neighborhood are used in the local least squares fit. As the grid spacing is decreased,
the optimal radius of support also changes. A variable radius support which depends
upon the probability density was found to give the best stability (especially near the
edges of the grid where a larger radius is needed).
The ALE frame requires the user to specify the grid velocities (the ˙r in Equa-
tions 21.5 through 21.8). The idea is to choose these grid velocities in order to

330 Quantum Trajectories
minimize the numerical errors. A uniform grid spacing was found to be most accurate
and can be constructed by choosing the ˙r
i
to satisfy (in one spacial dimension)
˙r
i
=
(r
t
i
− r
t
i
)
∆t
(21.9)
where t
= t + ∆t. The r
t
i
and r
t
i
are the particle positions on the uniform grids at
times t
and t, respectively. The uniform grid at the future time step t
is constructed
by first performing the time propagation from time t to t
using a Lagrangian frame
(i.e., ˙r = v) in Equations 21.5 through 21.8. A uniform grid is constructed between
the new end points r
1
and r
n
by uniformly distributing the n − 2 interior points. The
propagation from time t to t
is then repeated using the ALE frame with the ˙r given
by Equation 21.9. This process is repeated for each time step so that by construction
the ALE grid remains uniform as time evolves. The ALE grid also follows the flow
of probability density since the end points are propagated using a Lagrangian frame
(i.e., the end points move along quantum trajectories). Thus, the grid is optimal in that
only grid points with non-zero density are included in the calculation. However, as
the wave packet spreads, the uniform grid spacing increases. In order to maintain the
resolution of the calculation, an automatic grid refinement algorithm is used which
increases the number of points n → n
= n + ∆n as the calculation progresses. The
number of points added (∆n) is chosen so that the effective grid spacing (r
n
−r
1
)/n
remains less than some user specified value. The MLS algorithm is then used to
interpolate new values of the fields at the new n
points. The grid refinement is not
done at each time step. A threshold is set so that the grid refinement only occurs
when ∆n>5. The ALE frame with automatic grid refinement produces an optimal,
uniform grid with nearly constant grid spacing as time evolves.
The unitarity of the MLS/ALE method is significantly improved by using averaged
fields. In this approach, the MLS/ALE solution is propagated from time t to t
and all
of the fields and their derivatives (Q, V , f
q
, f
c
, ∇C, ∇·v, and ∇v) are computed at
the future time t
using the fourth-order Runge–Kutta method. These values are then
averaged with their values at the previous time step t . The MLS/ALE solution is then
recomputed from time t to t
using these averaged fields. In analogy with implicit finite
differencing, the use of averaged fields cancels out some of the numerical errors in the
calculation which results in a more accurate solution (i.e., higher order). However,
since the ALE/MLS method is already fourth-order accurate in both space and time,
perhaps a better analogy for using averaged fields is that it represents the first iteration
in a non-linear iterative solution method (see Section 21.5).
In the absence of nodes, the MLS/ALE method with automatic grid refinement and
averaged fields is an accurate and stable method for the direct numerical solution of
the quantum hydrodynamic equations. However, when nodes begin to occur (due to
the quantum interference associated with the reflected components of a wave packet
scattering off a potential barrier for example), the singular nature of Q and f
q
near
the forming nodes causes the method to break down. Associated with an impending
node is a “kink” in the velocity field. As a node forms, this kink develops into a sharp
discontinuity at the node’s location. In classical hydrodynamics, sharp discontinuities
Numerical Solution of the Quantum Hydrodynamic Equations 331
in the velocity field are often associated with shock fronts. Thus, quantum interference
can be interpreted as a source of shock fronts within the quantum hydrodynamic
formulation.A standard technique for stabilizing classical hydrodynamic calculations
in the presence of shocks is the introduction of artificial viscosity [11,13]. Artificial
viscosity produces a stabilizing force which prevents the negative slope associated
with the kink in the velocity field from becoming too large. Thus, the discontinuity
in the velocity field is avoided as well as the singularities in Q and f
q
. In effect, the
artificial viscosity prevents the formation of a true node which allows the numerical
propagation to continue for long times. The introduction of artificial viscosity terms
into the equations of motion does alter the solutions. However, these effects are by
construction localized to the regions near node formation which for barrier scattering
occur primarily in the incoming (reactant) channel. The scattering solution in the
product channel is often devoid of nodes and the solution in this region is accurate.
Thus, accurate transmission probabilities and reaction rates can be computed. The goal
is to choose the artificial viscosity coefficients small enough so to minimize its effects
on the solution but large enough to stabilize the calculations. Example scattering
problems using this approach are presented in the next section.
21.4 EXAMPLE SCATTERING PROBLEMS USING
THE MLS/ALE METHOD
The MLS/ALE method described in Section 21.3 has been successfully applied to
several barrier scattering calculations: (1) a one-dimensional Eckart barrier [11],
(2) a 2D model collinear chemical reaction [14], (3) a one-dimensional rounded
square barrier [15], and (4) an N-dimensional model chemical reaction with N =
1, ...,100 [16]. Each of these applications will be reviewed in the following
subsections.
21.4.1 O
NE TO FOUR-DIMENSIONAL SCATTERING OFF AN ECKART BARRIER
Figure 21.1 plots the initial amplitude of the one-dimensional Gaussian wave
packet and the Eckart barrier given by V (r) = V
0
sech
2
[a (r − r
b
)] where V
0
=
8000 cm
−1
(0.992 eV) is the barrier height, a = 0.4 determines the width, and
r
b
= 7a
0
is the location of the barrier maximum. The initial Gaussian wave packet
at t = 0 is given by
ψ(r,0)= (2 β/π)
1/4
e
−β (r−r
0
)
2
e
ik(r−r
0
)
, (21.10)
where β = 4a
−2
0
is the width parameter, r
0
= 2a
0
is the center of the wave packet,
and k determines the initial phase S
0
= k (r − r
0
) and flow kinetic energy E =
2
k
2
/(2m). The initial conditions for the C-amplitude and velocity v are given by
C
0
= ln(2β/π)
1/4
− β (r −r
0
)
2
and v
0
= (1/m) ∂S
0
/∂r = k/m, respectively.
The Gaussian wave packet was propagated using the ALE/MLS method includ-
ing artificial viscosity [11]. The amplitude R is plotted in Figure 21.2 for the time
step t = 95.4 fs and an initial kinetic energy of E = 0.8 eV. The wave packet has

332 Quantum Trajectories
0 51015
0
1
1.5
r (bohr)
V (eV) or R( r, t = 0)
V
R
FIGURE 21.1 The amplitude R for the initial Gaussian wave packet centered at r = 2a
0
and
the Eckart potential barrier centered at r = 7a
0
are plotted for the one-dimensional scattering
problem.
−10 0 10 20 30 40
0.4
0.5
0.6
r (bohr)
R
0
1
2
3
7
FIGURE 21.2 The amplitude R of the one-dimensional wave packet scattering from an Eckart
barrier centered at r = 7a
0
is plotted at time step t = 95.4 fs for E = 0.8 eV. The wave packet
tunnels through the barrier and splits into transmitted (r>7) and reflected (r<7) components.
(Reproduced with permission from Kendrick, B. K., J. Chem. Phys., 119, 5805, 2003.)
tunneled through the barrier and split into transmitted r>7 and reflected r<7 com-
ponents. Quantum interference effects (“ripples”) are clearly observed in the reflected
component in the region −4 <r<0. The transmitted component is smooth and
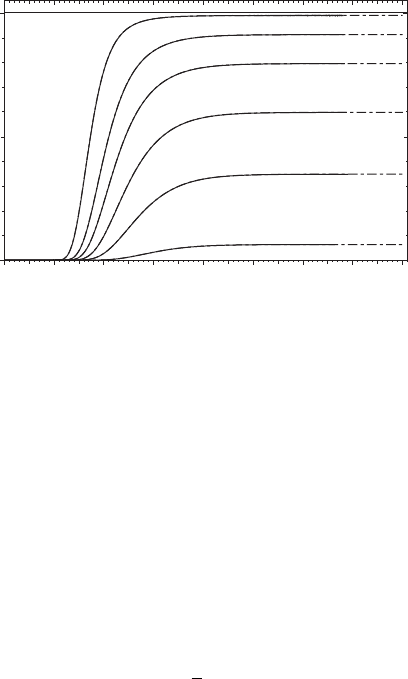
Gaussian like. The transmission probability is computed by integrating the probabil-
ity density ρ over the product region r>7. Figure 21.3 plots several transmission
probabilities as a function of time and energy. The ALE/MLS (Bohmian) results (the
long-short dashed curves) are compared to the results of standard quantum mechani-
cal calculations based on the Crank–Nicholson algorithm (the solid curves). Excellent
agreement between the two sets of results is observed.
Numerical Solution of the Quantum Hydrodynamic Equations 333
0 1020304050607080
0.5
Time (fs)
Probability
0
1
0.5 eV
0.8 eV
1.0 eV
1.2 eV
1.4 eV
1.8 eV
FIGURE 21.3 The transmission probability for the one-dimensional wave packet scattering
from an Eckart barrier is plotted as a function of time and energy. The solid curves are computed
using a Crank–Nicholson algorithm and the long-short dashed curves are computed using the
MLS/ALE (Bohmian) approach. The results are essentially identical. For reference a horizontal
line is plotted for unit probability. (Reproduced with permission from Kendrick, B. K., J. Chem.
Phys., 119, 5805, 2003.)
Figure 21.4 plots the 2D potential energy surface for a model collinear chemical
reaction [14]. The potential is given by V = V
1
(s) +V
2
(q;s) where the translational
part of the potential is an Eckart function
V
1
(s) = V
0
sech
2
(as), (21.11)
and the vibrational potential is a local harmonic function
V
2
(q;s) =
1
2
k(s)q
2
, (21.12)
where the local force constant is given by k(s) = k
0
[1 − σ exp(−λ s
2
)]. The initial
wave packet at time t = 0 is also plotted in Figure 21.4. It is the product of a
ground state harmonic oscillator function for the vibrational motion (q), a Gaussian
wave packet for the translational motion (s), and a phase factor to give it a non-
zero translational velocity. The 2D wave packet was propagated using the MLS/ALE
method including artificial viscosity [11, 14]. As in the one-dimensional problem
discussed above, the wave packet moves from left to right and tunnels through the
barrier located at s = 0 splitting into transmitted (s>0) and reflected (s<0)
components. The probability density associated with the transmitted wave packet
was integrated over all s and q in the product region (s>0) to obtain transmission
probabilities. The transmission probabilities were in excellent agreement with those
computed using the QTM method [14].
The 2D model described above was generalized to higher dimensions (N)by
including additional harmonic oscillator coordinates: q → q
l
where l = 1, ..., N −1
coupled to the reaction path s. The MLS/ALE method was generalized to this problem