Burton T. (et. al.) Wind energy Handbook
Подождите немного. Документ загружается.

8.2 Closed-loop Control: Issues and Objectives
8.2.1 Pitch control (see also Sections 4.2.4 and 6.7.3)
Pitch contro l is the most common means of controlling the aerodynamic power
generated by the turbine rotor. Pitch control also has a major effect on all the
aerodynamic loads generated by the rotor.
Below rated wind speed, the turbine should simply be trying to produce as much
power as possible, so there is generally no need to vary the pitch angle. The
aerodynamic loads below rated wind speed are generally lower than above rated,
so again there is no need to modulate these using pitch control. However, for fixed-
speed turbines, the optimum pitch angle for aerodynamic efficiency varies slightly
with wind speed. Therefore, on some turbines, the pitch angle is varied slowly by a
few degrees below rated in response to a heavily averaged anemometer or power
output signal.
Above rated wind speed, pitch control provides a very effective means of regulat-
ing the aerodynamic power and loads produced by the rotor so that design limits are
not exceeded. In order to achieve good regulation, however, the pitch control needs
to respond very rapidly to changing conditions. This highly active control action
needs very careful design as it interacts strongly with the turbine dynamics.
One of the strongest interactions is with the tower dynamics. As the blades pitch
to regulat e the aerodynamic torque, the aerodynamic thrust on the rotor also
changes substantially, and this feeds into the tower vibration. As the wind in-
creases, the pitch angle increases to maintain constant torque, but the rotor thrust
decreases. This allows the downwind tower deflection to decrease, and as the tower
top moves upwind the relative wind speed seen by the rotor increases. The
aerodynamic torque increases further, causing more pitch action. Clearly if the
pitch-controller gain is too high this positive feedback can result in instability. It is
therefore vital to take the tower dynamics into account when designing a pitch
controller.
Below rated wind speed, the pitch setting should be at its optimum value to give
maximum power. It follows that when the wind speed rises above rated, either an
increase or a decrease in pitch angle will result in a reduction in torque. An increase
in pitch angle, defined as tu rning the leading edge into wind, reduces the torque by
decreasing the angle of attack and henc e the lift. This is known as pitching towards
feather. A decrease in pitch, i.e., turning the leading edge downwind, reduces the
torque by increasing the angle of attack towards stall, where the lift start s to
decrease and the drag increases. This is known as pitching towards stall.
Although pitching towards feather is the more common strategy, some turbines
pitch towards stall. This is commonly known as active stall or assisted stall (see
Section 6.7.4). Pitching to feather requires much more dynam ic pitch activity than
pitching to stall: once a large part of the blade is in stall, very small pitch move-
ments suffice to control the torque . Pitching to stall results in significantly gre ater
thrust loads because of the increased drag . On the other hand, the thrust is much
more co nstant once the blade is stalled, so thrust-driven fatigue loads may well be
smaller.
CLOSED-LOOP CONTROL: ISSUES AND OBJECTIVES 475
A further problem with pitching to stall is that the lift curve slope at the start of
the stalled region is negative, i.e., the lift coefficient decreases with increasing angle
of attack. This results in negative aerodynamic damping, which can result in
instability of the blade bending modes, both in-plane and out of plane. This can be a
problem also with fixed pitch stall-regulated turbines.
Most pitch controlled turbines use full-span pitch control, in which the pitch
bearing is close to the hub. It is also possible, though not common, to achieve
aerodynamic control by pitching only the blade tips, or by using ailerons, flaps, air-
jets or other devices to modify the aerodynamic properties. These strategies will
result in most of the blade being stalled in high winds. If only the blade tips are
pitched, it may be difficult to fit a suitable actuator into the outboard portion of the
blade; accessibility for maintenance is also difficult.
8.2.2 Stall control
Many turbines are stall-regulated, which means that the blades are designed to stall
in high winds without any pitch action being required. This means that pitch
actuators are not required, although some means of aerodynamic braking is likely
to be required, if only for emergencies (see Section 6.8.2).
In order to achieve stall-regulation at reasonable wind speeds , the turbine must
operate closer to stall than its pitch-regulated counterpart, resulting in lower
aerodynamic efficiency below rated. This disadvantage may be mitigated in a
variable-speed turbine, when the rotor speed can be varied below rated in order to
maintain peak power coefficient.
In order for the turbine to stall rather than accelerate in high winds, the rotor
speed must be restrained. In a fixed speed turbine the rotor speed is restrained by
the generator, which is governed by the network frequency, as long as the torque
remains below the pull-out torque. In a variable speed turbine, the speed is
maintained by ensuring that the generator torque is varied to match the aerody-
namic torque. A variable-speed turbine offers the possibility to slow the rotor down
in high winds in order to bring it into stall. This means that the turbine can operate
further from the stall point in low winds, resulting in higher aerodynamic
efficiency. However, this strategy means that when a gust hits the turbine, the load
torque not only has to rise to match the wind torque but also has to increase further
in order to slow the rotor down into stall. This removes one of the main advantages
of variable-speed operation, namely that it allows very smooth control of torque
and power above rated.
8.2.3 Generator torque control (see also Sections 6.9 and 7.5)
The torque developed by a fixed-speed (i.e., directly-connected) induction generator
is determined purely by the slip speed. As the aerodynamic torque varies, the rotor
speed varies by a very small amount suc h that the generator torque changes to
match the aerodynamic torque. The generator torque cannot therefore be actively
controlled.
476 THE CONTROLLER
However, if a frequency converter is interposed between the generator and the
network, the generator speed will be able to vary. The frequency converter can be
actively controlled to maintain constant generator torque or power output above
rated wind speed. Below rated, the torque can be controlled to any desired value,
for example with the aim of varying the rotor speed to maintain maximum
aerodynamic efficiency.
There are several means of achieving variable-speed operation. One is to connect
the generator stator to the network through a frequency converter, which must then
be rated for the full power output of the turbine. Alternative arrangements include
a wound rotor induction generator with its stator connected directly to the network,
and with its rotor connected to the network through slip rings and a frequency
converter. This means that the frequency converter need only be rated to handle a
fraction of the total power, although the larger this fraction, the larger the a chiev-
able speed range will be.
A special case is the variable slip induction generator, where active control of the
resistance in series with the rotor windings allows the torque/speed relationship to
be modified. By means of closed-loop control ba sed on measured currents, it is
possible to maintain constant torque above rated, effectively allowing variable-
speed operation in this region. Below rated it behaves just like a normal induction
generator (Bossanyi and Gamble, 1991, Pedersen, 1995).
8.2.4 Yaw control
Turbines whether upwind or downwind, are generally stable in yaw (Section 3.10)
in the sense that if the nacelle is free to yaw, the turbine will naturally remain
pointing into the wind. However, it may not point exactly into wind, in which case
some active control of the nacelle angle may be needed to maximize the energy
capture. Since a yaw drive is usually required anyway, e.g. for start-up and for
unwinding the pendant cable, it may as well be used for active yaw tracking. Free
yaw has the advantage that it does not generate any yaw moments at the yaw
bearing. However, it is usually necessary to have at least some yaw damping, in
which case there will be a yaw moment at the bearing.
In pra ctice, most turbines do use active yaw control. A yaw error signal from the
nacelle-mounted wind vane is then used to calculate a demand signal for the yaw
actuator. Frequently the demand signal will simply be a command to yaw at a slow
fixed rate in one or the other direction. The yaw vane signal must be heavily
averaged, especially for upwind turbines where the vane is behind the rotor.
Because of the slow response of the yaw control system, a simple dead-band
controller is often sufficient. The yaw motor is switched on when the averaged yaw
error exceeds a certain value, and switched off again after a certain time or when
the nacelle has moved through a certain angle.
More complex control algorithms are sometimes used, but the control is always
slow-acting, and does not demand any special design considerations. One exception
is the case of active yaw control to regulate aerodynamic power in high winds, as
used on the variable speed Gamma 60 turbine referred to in Section 6.7.5. This
clearly requires very rapid yaw rates, and results in larg e yaw loads and gyroscopic
CLOSED-LOOP CONTROL: ISSUES AND OBJECTIVES 477
and asymmetric aerodynam ic loads on the rotor. This method of power regulation
would be too slow for a fixed-speed tu rbine, and even on the Gamma 60 the speed
excursions during above-rated operation were quite large.
8.2.5 Influence of the controller on loads
As well as regulating the turbine power in high winds, and perhaps optimizing it in
low winds, it is clear that the action of the control system can have a major impact
on the loads experienced by the turbine. The design of the controller must take into
account the effect on loads, and at least ensure that excessive loads will not result
from the control action. It is possible to go further than this, and explicitly design
the controller with the reduction of certain loads as an additional objective.
The reduction of certain loads is clearly compatible with the primary objective of
limiting power in high winds. For example, the limitation of power output is clearly
compatible with reduction of gearbox torque. In other cases, however, there may be
a conflict in which case the controller design is bound to be a compromise involving
a trade-off between competing goals. For example, there is a clear trade-off between
good control of power output and pitch actuator loads. The more actuator activity
can be tolerated, the better the power control can be.
The interaction between pitch control and tower vibration referred to in Se ction
8.2.1 is another importan t example, since the amount of tower vibration has a major
effect on tower base loads. Blade, hub and other structural loads will also be
influenced by pitch control activity. Generator torque control can have a major
impact on gearbox loads, as described below.
8.2.6 Defining controller objectives
The primary objective of the closed-loop controller can usually be stated fairly
simply. For example, the primary objective of the pitch controller may be to limit
power or rotor speed in high winds. There may be more than one ‘primary’
objective, as in the case where the pitch or torque controller is also used to optimize
energy capture in low winds.
However, since the controller can also have a major effect on structural loads and
vibrations, it is vital to consider these when designing the control algorithm. Thus a
fuller description of the pitch controller objective s might be:
• to regulate aerodynamic torque in above-rated wind speeds;
• to minimize peaks in gearbox torque;
• to avoid excessive pitch activity;
• to minimize tower base loads as far as possible by controlling tower vibration,
and
• to avoid exacerbating hub and blade root loads.
478 THE CONTROLLER

Clearly some of these objectives conflict with others, so the contr ol design process
will inevitably involve some degree of trade-off or optimization. In order to do this,
it is necessary to be able to quantify the different objectives. It is usually almost
impossible to do this with any precision, because the various loads may affect not
only the costs of different components (some times in complex ways) but also their
reliability. Even the trade-off between energy capture and component cost is not
straightforward, as it will depend on the wind regime, the discount rate, and
knowledge of future prices for the sale of electr icity. Therefore, some degree of
judgement will always be required in arriving at an acceptable controller design.
8.2.7 PI and PID controllers
A brief general description is given here of PI and PID controllers, since they will be
referred to a number of times in the subsequent sections. The proportional and
integral (PI) controller is an algorithm which is very widely used for controlling all
kinds of equipment and processes. The control action is calculated as the sum of
two terms, one proportional to the control error, which is the difference between
the desired and actual values of the quantity to be controlled, and one proportional
to the integral of the control error. The integral term ensures that in the steady state
the control error tends to zero – if it did not, the integral term would make the
control action continue to increase. The proportional term makes the algorithm
more responsive to rapid changes in the quantity being controlled.
A differential term is often added, which gives a contribution to the control action
proportional to the rate of change of the control error. This is then known as a PID
controller. In terms of the Laplace operator s, which can usefully be thought of as a
differentiation operator, the PID controller from measured signal x to control signal
y can be written as follows:
y ¼ K
p
þ
K
i
s
þ
K
d
s
1 þ sT
d
x (8:1)
where K
P
, K
i
and K
d
are the proportional, integral and derivative gains respec-
tively. The denominator of the differential term is essentially a low-pass filter, and
is needed to ensure that the gain of the algorithm does not increase indefinitely with
frequency, which would make the algorithm very sensitive to signal noise. Setting
K
d
¼ 0 results in a PI controller.
It is often the case that the control action is subject to limits. For example, if the
control action represents the blade pitch used to control power abov e rated, then
when the power drops below rated the pitch will be limited to the fine pitch setting,
and will not be allowed to drop further. In this situation the integral term of the PI
or PID controller will grow more and more negative as the power remains below
rated. Then when the wind spee d rises again and the power rises above rated, the
integral term will start to grow again towards zero, but until it gets close to zero it
will more than compensate for the proportional and derivative terms. Therefore the
pitch may remain ‘stuck’ at fine pitch for a considerable time, dependi ng on how
long the power has been below rated, until the integral term has come back close to
CLOSED-LOOP CONTROL: ISSUES AND OBJECTIVES 479
zero. This is known as integrator wind-up, and clearly it must be prevented. This is
done in effect by disabling the integrator when the pitch is on the limit. This is
known as ‘integrator desaturation’, which is described more fully in Section 8.6.
The design of PI and PID controllers, inclu ding the choice of gains, is described in
more detail in Section 8.4.
8.3 Closed-loop Control: General Techniques
This section outlines the pri nciples behind many of the types of closed-loop
controllers to be found in wind-turbines. Mathematical methods for designing the
closed-loop algorithms are covered in Section 8.4.
8.3.1 Control of fixed-speed, pitch-regulated turbines
A fixed-speed pitch-regulated turbine usually means a turbine that has an induction
generator connected directl y to the AC network, and which therefore rotates at a
nearly constant speed. As the wind speed varies, the power produced will vary
roughly as the cube of the wind speed. At rated wind speed, the electrical power
generated becomes equal to the rating of the turbine, and the blades are then
pitched in order to reduce the aerodynamic efficiency of the rotor and limit the
power to the rated value. The usual strategy is to pitch the blades in response to the
power error, defined as the difference between the rated power and the actual
power being generated, as measured by a power transducer. The primary objective
is then to devise a dynamic pitch control algorithm that minimizes the power error,
although as explained above, this may not be the only objective.
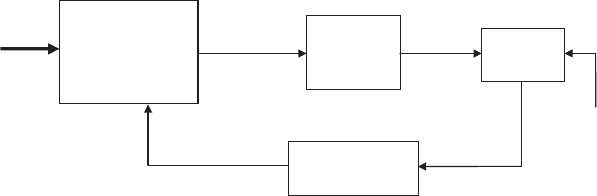
The main elements of the control loop are shown in Figure 8.2. A PI or PID
algorithm is ofte n used for the controller.
When the power falls below rated, the pitch demand saturates at the fine pitch
limit, maximizing the aerodynamic efficiency of the rotor. Since the optimum pitch
angle depends on the tip speed ratio, it is possible to increase energy capture below
rated by a small percentage if the fine pitch limit is varied in response to the wind
speed. The measured power itself is the best available measure of wind speed over
Turbine
Pitch
actuator
Controller
Power
transducer
Wind
Electric
power
Measured
power
Pitch
demand
Blade pitch
Power
set-point
Figure 8.2 Main Control Loop for a Fixed-speed Pitch-regulated Turbine
480
THE CONTROLLER
the whole turbine. However , the fine pitch limit should be varied relatively slowly
compared to the control-loop dynamics. Satisfactory performance can be obtained
by changing the fine pitch limit in response to a moving average of the measured
power. The moving average time constant should be significantly longer than the
blade-passing frequency to avoid unnecessary pitch activity below rated.
8.3.2 Control of variable-speed pitch-regulated turbines
With a variable-speed generator, it becomes possible to control the load torque at
the generator directly, so that the speed of the turbine rotor can be allowed to vary
between certain limits. An often-quoted advantage of variable-speed operation is
that below rated wind speed, the rotor speed can be adjusted in proportion to the
wind speed so that the optimum tip speed ratio is maintained. At this tip speed
ratio the power coefficient, C
P
, is a maximum, which means that the aerody namic
power captured by the rotor is maximized. This is often used to suggest that a
variable-speed turbine can capture much more energy than a fixed-speed turbine of
the same diameter. In practice, however, it may not be possible to realize as much
gain as this simple argument would suggest.
Maximum aerodynamic efficiency is achieved at the optimum tip speed ratio
º ¼ º
opt
, at which the power coefficient C
P
has its maximum value C
P(max)
. Since the
rotor speed is then proportional to wind speed U, the power increases with U
3
and
3
, and the torque with U
2
and
2
. The aerodynamic torque is given by
Q
a
¼
1
2
rAC
Q
U
2
R ¼
1
2
rR
3
C
P
º
U
2
(8:2)
Since U ¼ R=º we have
Q
a
¼
1
2
rR
5
C
P
º
2
2
(8:3)
In the steady state therefore, the optimum tip speed ratio can be maintained by
setting the load torque at the generator, Q
g
, to balance the aerodynamic torque, i.e.,
Q
g
¼
1
2
rR
5
C
P
º
3
G
3
ø
2
g
Q
L
(8:4)
Here Q
L
represents the mechanical torque loss in the drive train (which may itself
be a function of rotational speed and torque), referred to the high-speed shaft. The
generator speed is ø
g
¼ G, where G is the gearbox ratio.
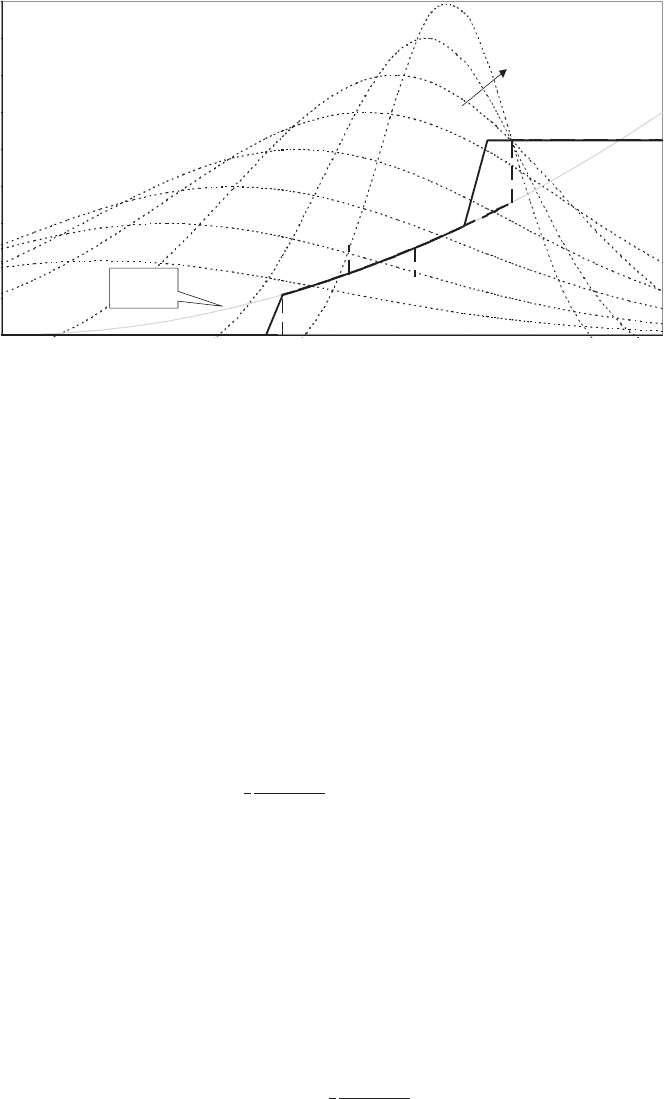
This torque–speed relationship is shown schematically in Figure 8.3 as line BC.
Although it represents the steady-state solution for optimum C
P
, it can also be used
dynamically to control generator torque demand as a function of measured
generator speed. In many cases, this is a very benign and satisfactory way of
controlling generator torque below rated wind speed.
For tracking peak C
P
below rated in a variable-speed turbine, the quadratic
CLOSED-LOOP CONTROL: GENERAL TECHNIQUES 481
algorithm of Equation (8.4) works well and gives smooth, stable control. However,
in turbul ent winds, the large rotor inertia prevents it from changing speed fast
enough to follow the wind, so rather than staying on the peak of the C
P
curve it will
constantly fall off either side, resulting in a lower mean C
P
. This problem is clearly
worse for heavy rotors, and also if the C
P
–º curve has a sharp peak. Thus in
optimizing a blade design fo r variable-speed operation, it is not only important to
try to maximize the peak C
P
, but also to ensure that the C
P
–º curve is reasonably
flat-topped.
It is possible to manipulate the generator torque to cause the rotor speed to
change faster when required, so staying closer to the peak of the C
P
curve. One way
to do this is to modify the torque demand by a term proportional to rotor
acceleration (Bossanyi, 1994):
Q
g
¼
1
2
rR
5
C
P
º
3
G
3
ø
2
g
Q
L
B
_
øø
g
(8:5)
For a stiff drive train, and ignoring frequency converter dynamics, the torque
balance gives:
I
_
¼ Q
a
GQ
g
(8:6)
where I is the total inertia (of rotor, drive train and generator) and is the
rotational speed of the rotor. Hence
(I G
2
B)
_
¼ Q
a
1
2
rR
5
C
P
º
3
G
2
ø
2
g
þ GQ
L
(8:7)
0
20
40
60
80
100
120
140
160
180
0.00 200. 0 0 40 0. 00 600.0 0 800. 0 0 1000 . 00 1200 . 00 1400. 00 1600 .00 1800 .00 2000 . 00
Generator speed
Generator torque
A A1
B
DE
C1
C
4 m/s
6 m/s
8 m/s
10 m/s
12 m/s
14 m/s
16 m/s
18 m/s
Opt imum C
P
(fine pitch)
F
GH
J
Increasing
pitch
Figure 8.3 Schematic Torque–Speed Curve for a Variable-speed Pitch-regulated Turbine
482
THE CONTROLLER

The effective inertia is reduced from I to I G
2
B, allowing the rotor speed to
respond more rapidly to change s in wind speed.
Another possible method is to use available measurements to make an estimate
of the wind speed, calculate the rotor speed required for optimum C
P
, and then use
the generator torque to achieve that speed as rapidly as possible. The aerodynamic
torque can be expressed as
Q
a
¼
1
2
rAC
Q
RU
2
¼
1
2
rR
5
2
C
Q
=º
2
(8:8)
where R is the turbine radius, the rotational speed, and C
Q
the torque coefficient.
If drive train torsional flexibility is ignored, a simple estimator for the aerodynamic
torque is
Q
a
¼ GQ
g
þ I
_
¼ GQ
g
þ IG
_
øø
g
(8:9)
where I is the total inertia. A more sophisticated estimator could take into account
drive train torsion, etc. From this it is possible to estimate the value of the function
F(º) ¼ C
Q
(º)=º
2
as
F
(º) ¼
Q
a
1
2
rR
5
(Gø
g
)
2
(8:10)
Knowing the function F(º) from steady-state aerodynamic analysis, one can then
deduce the current estimated tip speed ratio º
. The desired generator speed for
optimum tip speed ratio can then be calculated as
ø
d
¼ ø
g
^
ºº=º
(8:11)
where
^
ºº is the optimum tip speed ratio to be tracked. A simple PI controller can
then be used, acting on the speed error ø
g
ø
d
, to calculate a generator torque
demand which will track ø
d
. The higher the gain of PI controller, the better the C
P
tracking, but at the expense of larger power variations. Simulations for a particular
turbine showed that a below-rated energy gain of almost 1 percent could be
achieved, with large but not unacceptable power variations.
Holley, Rock and Chaney (1999) demonstrated similar results with a more
sophisticated scheme, and also showed that a perfect C
P
tracker would capture 3
percent more energy below rated by demanding huge power swings of plus and
minus three to four times rated power, which is totally unacceptable.
As turbine diameters increase in relation to the lateral and vertical length scales
of turbulence, it becomes more difficult to achieve peak C
P
anyway because of the
non-uniformity of the wind speed over the rotor. Thus if one part of a blade is at its
optimum angle of attack at some instant, other parts will not be.
In most cases, it is actually not practical to maintain peak C
P
from cut-in all the
way to rated wind speed. Although some variable-speed systems can operate all
the way down to zero rotational speed, this is not the case with limited range
variable-speed systems based on wound rotor induction generators, which are
CLOSED-LOOP CONTROL: GENERAL TECHNIQUES 483
popular especially on larger turbines. These systems only need a power converter
rated to handle a fraction of the turbine pow er, which is a major cost saving. This
means that in low wind speeds, just above cut-in, it may be necessary to operate at
an essentially constant rotational speed, with the tip speed ratio above the optimum
value.
At the other end of the range, it is usual to limit the rotational speed to some
level, usually determined by aerodynamic noise constraints, which is reached at a
wind speed which is still some way below rated. It is then cost-effective to increase
the torque demand further, at essentially constant rotational speed, until rated
power is reached. Figu re 8.3 illustrates some typical torque–speed trajectories,
which are explained in more detail below. Turbines designed for noise-insensitive
sites may be designed to operate along the optimum-C
P
trajectory all the way until
rated power is reached. The higher rotational speed implies lower torque and in-
plane loads, but higher out-of-plane loads, for the same rated power. This strategy
might be of interest for offshore wind-turbines.
8.3.3 Pitch control for variable-speed turbines
Once the rated torque has been reached, no further increase in load torque can
occur, so the turbine will start to speed up. Pitch control is then used to regulate the
rotor speed, with the load torque held constant. A PI or PID controller is often
satisfactory for this application. In some situations it may be useful to include notch
filters on the speed error to prevent excessive pitch action at, for example, the
blade-passing frequency or the drive train resonant frequency (see Section 8.3.5).
Rather than maintain a constant torque demand while the pitch control is
regulating the rotational speed, it is possible to vary the torque demand in inverse
proportion to the measured speed in order to keep the power output, rath er than
the torque, at a constant level. Provided the pitc h controller is able to mai ntain the
speed close to the set point, there will be little difference between these two
approaches. The reduction of load torque with increasing speed has a slight
destabilizing effect on the pitch controller, but this is often not serious, and
provided the gearbox torque and rotor speed variations are not greatly affected, the
constant pow er approach is attractive from the perspective of power quality and
flicker.
8.3.4 Switching between torque and pitch control
In practice, acoustic noise, loads or other design constraints usually mean that the
maximum allowable rotor speed is reached at a relatively low wind speed. As the
wind speed increases further, it is desirable to increase the torque and power
without any further speed increase, in order to capture more energy from the wind.
The simplest strategy is to implement a torque–speed ramp: line CD in Figure 8.3
Once rated power or torque is reached, pitch control is used to maintain the rotor
speed at its rated value. In order to prevent the torque and pitch controllers from
interfering with one another, the speed set-point for the pitch controller is set a little
484 THE CONTROLLER