Burton T. (et. al.) Wind energy Handbook
Подождите немного. Документ загружается.


y, then Y(s) ¼ kH(s)X(s ), where X(s) and Y(s) are the Laplace transforms of x and
y. When the loop is closed at X the closed-loop dynamics can be derived as
Y9(s) ¼ kH(s)(X(s) Y9(s )) (8:15)
where Y9(s) is the Laplace transform of the closed-loop output. This can be rewritten
as
Y9(s) ¼
kH(s)
1 þ kH(s)
X(s)(8:16)
In other words if the open-loop system is H(s), the closed-loop system will have
dynamics represented by H9(s) ¼ kH(s)=(1 þ kH(s)).
Now a linear transfer function can be expressed as the ratio of two polynomials
in s. Thus for the open-loop system, A(s)Y(s) ¼ B(s)X(s), and so H(s) ¼ B(s)=A(s),
where A(s) and B(s) are polynomials in s. The roots of the polynomial A(s) give
important information about the system response. Consider, for example, a first-
order system
_
yy
1
¼ x y
1
(8:17)
representing a first-order lagged response of y
1
with respect to x. This system can
be represented by the transfer function
H(s) ¼
B(s)
A(s)
(8:18)
where B(s) ¼ 1 and A(s) ¼ 1 þ s.
The single root of A(s) is given by ¼1=, while Equation (8.17) has solutions
of the form y ¼ a þ be
t
, with ¼1= again. These solutions are stable if is
positive, in other words if the root of A(s) is negative. A second-order system will
have solutions of the form y ¼ a þ be
1
t
þ ce
2
t
, where once again
1
and
2
are the
roots of the second-order polynomial which forms the denominat or of the transfer
function. Now
1
and
2
may be real numbers or they may form a complex
conjugate pair jø. The solutions are stable if
1
and
2
are both negative, or if
is negative. In general, it can be stated that a linear system is stable if all the roots of
the denominator polynomial have negative real parts. These roots are known as the
poles of the system, and they represent values of the Laplace variable which make
the transfer function infinite. The roots of the numerator polynomial are known as
the zeros of the system, sin ce transfer function is zero at these points.
Now let us rewrite Equation (8.16) in terms of the polynomials A and B:
Y9(s) ¼
kB(s)
A(s) þ kB(s)
X(s)(8:19)
Clearly when the gain k is small, the closed-loop transfer function tends towards
the open-loop transfer function kB=A. However, when the gain is large the poles
CLOSED-LOOP CONTROL: ANALYTICAL DESIGN METHODS 495
will tend towards the roots of B. In other words as the gain increases from zero to
infinity, the poles of the closed-loop system move from the open-loop poles and
end up at the open-loop zeros. They move along complicated trajectories in the
complex plane. A plot of these trajectories is known as a root locus plot, and is very
useful for hel ping to select the feedback gain k. The gain is selected such that all the
closed-loop poles are in the left half-plane, maki ng the system stable, and preferably
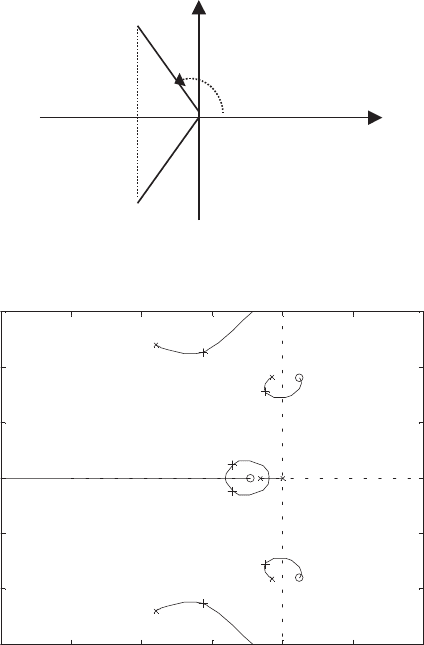
as well-damped as possible. The damping factor for a pole pair at jø ¼ re
jŁ
is
given by cos(Ł) ¼ =r, as shown in Figure 8.11.
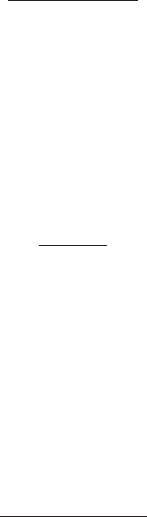
Figure 8.12 shows an example of a root locus plot for a variable-speed pitch
controller. As the gain increases, the closed-loop poles (þ) move from the open-l oop
poles (x), corresponding to zero feedback gain, to the open-loop zeros (O). (Actually
there are usually more poles than zeros; the ‘missing’ zeros can be considered to be
equally spaced around a circle of infinite radius.) In this example, the gain has been
chosen to maximize the damping of the lightly- damped tower poles (B). Any
further increase in gain would exacerbate tower vibration, eventually leading to
-4
-3 -2 -1 0 1 2-3
-2
-1
0
1
2
3
Real Axis
Imaginary Axis
A
A
B
B
C
C
Figure 8.12 Example Root Locus Plot
r
θ
-σ
ω
Figure 8.11 Damping Ratio for a Complex Pole Pair
496
THE CONTROLLER

instability as the poles cross the imaginary axis. At the chosen gain, the controller
poles (A) are well-damped. The poles at (C) result from the pitch actuator
dynamics. They remain sufficiently well-damped, although again, excessive gain
would drive them to instability.
Although a root locus plot is useful for helping to select the overall controller
gain, this can only be done once the other parameters defining the contr oller have
been fixed. A PI controller (Equ ation (8.1) with K
d
¼ 0) is characterized by only two
parameters, K
P
and K
i
. It can be re-written as
y ¼ K
p
1 þ
1
sT
i
x (8:20)
where T
i
¼ K
P
=K
i
is known as the integral time constant. The root locus plot can be
used to select K
P
once T
i
has been defined, but the shape of the loci will change
with different T
i
. Ho wever, it is relatively straightforward to iterate on the value of
T
i
, using the root locus plot each time to select K
P
, until a suitable overall perform-
ance is achieved, using criteria such as those listed below. In the case of PID and
more complex controllers, wh ere more than two parameters must be selected, other
ways must be found to select the parameters, although it is always possible to use a
root locus plot for the final choice of the overall gain.
The choice of parameters will usually be an iterative process, often using a certain
amount of trial and error, and on each iteration the performance of the resulting
controller must be assessed. Use ful measures of performance include the following.
• Gain and phase margins which are calculated from the open-loop frequency
response, and give an indication of how close the system is to instability. If the
margins are too narrow, the system may tend to become unstable. The system
will be unstable if the ope n-loop system displays a 1808 phase lag with unity gain.
The phase margin represents the difference between the actual phase lag and 1808
at the point where the open-loop gain crosses unity. A phase margin of at least
458 is usually recommended, although there is no firm rule. Similarly, the gain
margin represents the amount by which the open-loop gain is less than unity
where the open-loop phase lag crosses 1808. A gain margin of at least a few
decibels is recommended.
• The cross-over frequency, which is the frequency at which the open-loop gain
crosses unity, gives a useful measure of the responsiveness of the controller.
• The positi ons of the closed-loop poles of the system indicate how well various
resonances will be damped.
• Closed-loop step responses, for example the response of the system to a step
change in wind speed, give a useful indication of the effectiveness of the
controller. For example, in tuning a pitch controller, the rotor speed and power
excursions should return rapidly and smoothly to zero, the tower vibration
should damp out reasonably fast, and the pitch angle should change smoothly to
its new value, without too much overshoot and without too mu ch oscillation.
CLOSED-LOOP CONTROL: ANALYTICAL DESIGN METHODS 497
• Frequency responses of the closed-loop system also give some very useful
indications. For example, in the case of pitch controller:
• the frequency response from wind speed to rotor speed or electrical power
should die away at low frequencies, as the low frequency wind variations are
controlled away;
• the frequency response from wind speed to pitch angle must die away at high
frequencies, and must not be too great at critical disturbance frequencies such
as the blade-passing frequency, or the drive train resonant frequency in
variable-speed systems;
• the frequency response from wind speed to tower velocity should not have too
large a peak at the tower resonant frequency,
and so forth.
With experience it is possible, by examining measures such as these, to converge
rapidly on a controller tuning which will work well in practice.
8.4.2 Gain scheduling for pitch controllers
Close to rated, since the fine pitch angle is selected to maximize power, it follows
that the sensitivity of aerodynamic torque to pitch angle is very small. Thus a much
larger controller gain is required here than at higher wind speeds, where a small
change in pitch can have a large effect on torque. Frequently the torque sensitivity
changes almos t linearly with pitch angle, and so can be compensated for by varying
the overall gain of the controller linearly in inverse proportion to the pitch angle .
Such a modification of gain with operating point is termed a ‘gain schedule’.
However, the sensitivity of thrust to pitch angle varies in a different way, and
because of its effect on tower dynamics, which couples strongly with the pitch
controller, it may be necessary to modify the gain schedule further to ensure good
performance in all winds.
It is therfore important to generate linearized models of the system corresponding
to several different operating points between rated and cu t-out wind speed, and to
choose a gain schedule which ensures that the above performance measures are
satisfactory over the whole range.
8.4.3 Adding more terms to the controller
It is often possible to improve the per formance of a basic PI or PID controller by
adding extra terms to modify the behaviour in a particular frequency range. For
example, a pitch control algorithm may be found to cause a large amount of pitch
actuator activity at a relatively high frequency, which is of little benefit in control-
ling the turbine and may be quite counter-productive. This may occur if some
498 THE CONTROLLER
dynamic mode was not taken into account in the linearized model which was used
to design the turbine. An example of this is the drive train torsional resonance in a
variable-speed turbine, which can feed through to the measured generator speed
and hence to the pitch control, causing high-frequency pitch activity which is of no
benefit. Another likely cause is the pitch response to a major external forcing
frequency, such as the blade-passing frequency. While a low pass filter in series
with the controller will certainly reduce high-frequency response, the resulting
phase shift at lower frequencies may significantly impair the overall performance of
the co ntroller. A better ‘cure’ for excessive activity at some well-defined frequency
is to include a notch filter in series with the controller. A simple second-order notch
filter tuned to filter out a particular frequency of ø rad/s has a transfer function
s
2
þ ø
2
s
2
þ 2øs þ ø
2
(8:21)
where the ‘damping’ parameter represents the width or ‘strength’ of the notch
filter. This should be increased until the filtering effect is sufficient at the target
frequency, without too much detriment to the control performance at lower
frequencies.
Another useful filter is the phase advance or phase lag filter,
(s þ ø
1
)
(s þ ø
2
)
(8:22)
which increases the open-loop phase lag between frequencies ø
1
and ø
2
(ø
1
, ø
2
),
or dec reases it if ø
1
. ø
2
. Phase advance can sometimes be useful for improving the
stability margin s. Open-loop gain and phase plots can therefore be useful for
helping to select ø
1
and ø
2
. A PID controller can be rewritten as a PI controller in
series with a phase advance (or phase lag) filter.
A general second-order filter of the form
s
2
þ 2
1
ø
1
s þ ø
2
1
s
2
þ 2
2
ø
2
s þ ø
2
2
(8:23)
can sometimes be useful for modifying the frequency response in a particular area.
With ø
1
¼ ø
2
and
1
¼ 0 this is just a notch filter, as described above. With
1
.
2
the filter has a bandpass effect, which can be used to increase control action at a
particular frequency.
A root locus plot is often useful for investigating the effect of such filters. With
experience, the effect on the loci of placing the filter poles and zeros in particular
ways can be anticipated. Such techniques can help to see how, for example, a pair
of lightly-damped poles due to a structural resonance can be dragged further away
from the imaginary axis, so as to increase the damping.
CLOSED-LOOP CONTROL: ANALYTICAL DESIGN METHODS 499
8.4.4 Other extensions to classical controllers
Other extensions to classical controllers have sometimes been used in order to
further improve the performance in particular ways, for example the use of non-
linear gains, and variable or asymmetrical limits.
Non-linear gains are sometimes used to penalize large peaks or excursions in
controlled variables. For example, the gain of a PI pitch controller can be increased
as the power or speed error increases. A simple way to do this is to add to the input
signal to the PI controller a term proportional to the square or cube of the error
(remembering to adjust the sign if the square is used). This technique should be
used with caution, however, as too much non-linearity will drive the system
towards instability, in much the same way as if the linear gain is too high. This
technique requires a trial-and-error approach since it is very difficult to analyse the
closed-loop behaviour of non-linear systems using standard methods. Adding the
non-linear term only when the power or speed is above the set-point will help to
reduce peaks, but will also cause a reduction in the mean power or speed, similar to
a reduction in set-point.
Asymmetrical pitch rate limits can also be used to reduce peaks. By allowing the
blades to pitch faster to wards feather than towards fine, power or speed peaks will
be reduced. Once again the mean level will also be reduced by introducing this
asymmetry. However, this technique is somewhat more ‘comfortable’ than the use
of non-linear gains, in that it remains a linear system constrained by limits.
There is often a desire to reduce the set-point in high winds, to reduce the
infrequent but highly-damaging loads experienced in those conditions at the
expense of a small loss of output. It is straightforward to reduce the set-point as a
function of wind speed (the pitch angle is usually used as a measure of the rotor-
averaged wind speed, as for gain scheduling). However, the most damaging loads
occur during high turbulence, and so it would be better to reduce the set-point in
high winds only when the turbulence is also high. Rather than actually reducing
the set-point, asymmetrical rate limits provide a simple but effective means of
achieving this effect, since the rate limits will only ‘bite’ when the turbulence is
high.
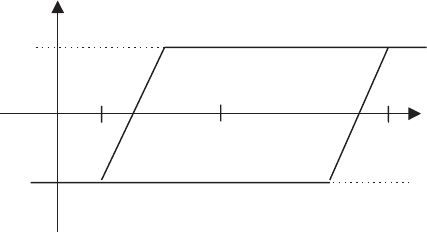
A further extension of this technique is to modify the rate limits dynamically,
even to the extent of changing the sign of a rate limit in order to force the pitc h in
one direction during certain conditions such as large power or speed excursions. A
useful application of this is in the control of variable slip systems, where it is
important to keep the speed above the minimum slip point (point B in Figure 8.8). If
the speed falls below this point, it then ceases to vary much as it is constrained by
the minimum slip curve, and so the proportional term in the PI controller ceases to
respond. Modifyi ng the rate limits as a function of speed error as in Figure 8.13 is a
useful technique to prevent this happening.
8.4.5 Optimal feedback methods
The controller design methods described above are based on classical design
techniques, and often result in relatively simple PI or PI D algorithms together with
500 THE CONTROLLER
various filters in series or in parallel, such as phase shift, notch or bandpass filters,
and sometimes using additional sensor inputs. These methods can be used to
design fairly complex high-order controllers, but only with a considerable amount
of experience on the part of the designer.
There is, however, a huge body of theory (and practice, although to a lesser
extent) relating to more advanced controller design methods, some of which have
been investigated to some extent in the context of wind-turbine control, for
example:
• self-tuning controllers,
• LQG/optimal feedback and H
1
control methods ,
• fuzzy logic controllers,
• neural network methods.
Self-tuning controllers (Clarke and Gaw throp, 1975) are generally fixed-order
controllers defined by a set of coefficients, which are based on an empirical linear
model of the system. The model is used to make predictions of the sensor measure-
ments, and the prediction errors are used to update the coefficients of the model
and the feedback law.
If the system dynamics are known, then some very similar mathematical theory
can be used, but applied in a different way. Rather than fitting an empirical model,
a linearized physical model is used to predict sensor outputs, and the prediction
errors are used to update estimates of the system state variables. These variables
may include rotational speeds, torque s, deflections, etc. as well as the actual wind
speed, and so their values can be used to calculate appropriate control actions even
though those particular variables are not actuall y measured.
Observers
A subset of the known dynamics may be used to make estimates of a particular
variable: for example, some controllers use a wind-speed observer to estimate the
Sli
p
s
p
eed
Pitch rate
limits
Set-point,
e.g. 4% slip
1% 10%
+10 °/s
-10 °/s
Figure 8.13 Pitch Rate Limit Modification for a Variable-slip Controller
CLOSED-LOOP CONTROL: ANALYTICAL DESIGN METHODS 501
wind speed seen by the rotor from the measured power and/or rotational speed
and the pitch angle. The estimated wind speed can then be used to define the
appropriate desired pitch angle.
State estimators
Alternatively, using a full model of the dynamics, a Kalman filter can be used to
estimate all the system states from the prediction errors (Bossanyi, 1987). This
technique can explicitly use knowledg e of the variance of any stochastic contribu-
tions to the dynamics, as well as noise on the measured signals, in a mathematically
optimum way to generate the best estimates of the states. This relies on an
assumption of Gaussian characteristics for the stochastic inputs. Thus it is possible
explicitly to take account of the stochastic nature of the wind input by formulating a
wind model driven by a Gaussian input. This can even be extended to include
blade-passing effects.
The Kalman filter can readily take account of more than one sensor input in
generating its ‘optimal’ state estimates. Thus it is ideal for making use of, for
example, an accelerometer measuring tower fore-aft motion as well as the normal
power or speed transducer. It would be straightforward to add other sensors, if
available, to improve the state estimates further.
Optimal feedback
Knowing the state estimates, it is then possible to define a cost function, which is a
function of the system state s and control actions. The controller objective can then
be defined mathematically: the obje ctive is to minimize the selected cost function. If
the cost function is defined as a quadratic function of the states and control actions
(which is actually a rather convenient formulation), then it is relatively straightfor-
ward to calculate the ‘optimal’ feedback law. This is defined as the feedback law
which generates control signals as a linear combination of the states such that the
cost function will be minimized. Since a Linear model is required, with a Quadratic
cost function and Gaussian disturbances, this is known as an LQG controller.
This cost function approach means that the trade-off between a number of
partially competing objectives is explicitly defined, by selecting suitable weights for
the terms of the cost function. This makes such a method ideal for a controller
which attempts to reduce loads as well as achieving its primary function of
regulating power or speed. Alth ough it is not practical to calculate the weightings
in the cost function rigorously, they can be adjusted in a very intuitive way. This
approach is also readily configured for multiple inputs and outputs, so for example,
as well as using generator speed and tower acceleration inputs, it can in principle
simultaneously produce the pitch demand and torque demand outputs which will
minimize the cost function.
Figure 8.14 illustrates the structure of the LQG controller, showing the state
estimator and the optimal state feedback. For implementation, the entire controller
can be reduced to a set of difference equations connecting the measured outputs ( y)
502 THE CONTROLLER
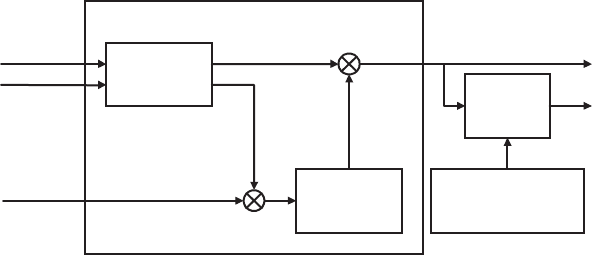
to the new control signals (u). This means that once the design is completed, the
algorithm is easy to implement and does not require massive processing power.
The linearized dynamics of the system are expressed in discrete state-space form:
x9(k) ¼ Ax(k 1) þ Bu(k 1)
The Kalman gain L is calculated taking into account the stochastic disturbances
affecting the system, and allows the state estimates to be improved by comparing
the predicted sensor outputs y9 to the actual outputs y:
x(k) ¼ x9(k) þ L( y(k 1) y9(k 1))
where
y9(k 1) ¼ Cx(k 1) þ Du(k 1)
The optimal state feedback gain K generates the controls actions
u(k) ¼Kx(k)
where K is calculated such that the quadratic cost function J is minimized. The cost
function is
J ¼ x
T
Px þ u
T
Qu
(actually the integ ral, or the mean value over time, or the expected value of this
quantity). P and Q are the state and control weighting matrices. It is usually more
useful to define the cost function in terms of other quantities, v, which can be
considered as extra (often un-m easured) outputs of the system:
v ¼ C
v
x þ D
v
u
Kalman filter (state estimator)
Turbine
dynamics
x(k -1)
u(k -1)
Correction
x'(k)
x(k)
u(k)
y(k-1)
Optimal
state
feedback
y'(k-1)
Cost function
J = x
T
.P.x + u
T
.Q.u
y = measured signals y’ = predicted measurements u = control signals
x = state estimates x’ = predicted states
Figure 8.14 Structure of the LQG Controller
CLOSED-LOOP CONTROL: ANALYTICAL DESIGN METHODS 503
Hence the cost function is
J ¼ v
T
Rv þ u
T
Su ¼ x
T
C
T
v
RC
v
x þ u
T
D
T
v
RD
v
u þ u
T
Su
so that P ¼ C
T
v
RC
v
and Q ¼ D
T
v
RD
v
þ S.
Another possibility is to generate optimal control signals directly as a function of
the sensor outputs. This is known as optimal output feedback (Steinbuch, 1989).
However, the mathematical solution of this problem is based on necessary condi-
tions for optimality which are not always sufficient for optimality. Therefore the
solutions generated can be, and in practice often are, non-optimal and potentially
very far from optimal. This variation is therefore rather problematic.
As turbines become larger and the requirements placed on the controller become
more demanding, advanced control methods such as LQG are likely to become
increasingly used, although as yet there are few known examples of the practical
application of these techniques in commercial wind-turbines. However, this ap-
proach was used to design a controller for a 300 kW fixed-speed two-bladed
teetered turbine in the UK in 1992. After testing on a prototyp e turbine in the field,
this controller was shown to give significant reductions in pitch activity and power
excursions compared to the original PI controller, and it was subsequently adopted
for the production machine and successfully used on over 70 turbines (Bossanyi,
2000).
LQG controllers are not necessarily robust, which means that they can be
sensitive to errors in the turbine model. A similar approach is the H
1
controller, in
which uncertainties in the turbine and wind mo dels can explicitly be taken into
account. Such a controller was evaluated in the field on a 400 kW fixed-speed pitch-
regulated turbine by Knudsen, Andersen and To
¨
ffner-Clausen (1997), who reported
a reduction in pitch activity and some potential for reduced fatigue loads compared
to a PI contro ller.
8.4.6 Other methods
Rule-based or ‘fuzzy logic’ controllers are useful when the system dynamics are not
well known or when they contain important non-linearities. Control actions are
calculated by weighting the outcomes of a set of rules applied to the measured
signals. Alth ough there has been some work on fuzzy controllers for wind-turbines,
there is no clear evidence of benefits. In practice, quite a good knowledge of the
system dynamics is usually available, and the dynamics can reasonably be linear-
ized at each opera ting point, so there is no clear motivation for such an approach.
The same could be said of controllers based on neural networks. These are
learning algorithms, which are ‘trained’ to generate suitable control actions using a
particular set of conditions, and then allowed to use their learnt behaviour as a
general control algorithm. While this is potentially a powerful technique, it is
difficult to be sure that such a controller will generate acceptable control actions in
all circumstances.
Nevertheless, there may be some potential for such methods where significant
non-linearities or non-stationary dynamics are involved. These might be in the
504 THE CONTROLLER