Bradley D., Russell D.W. (eds.) Mechatronics in Action: Case Studies in Mechatronics - Applications and Education
Подождите немного. Документ загружается.

116 D. Toal, E. Omerdic, J. Riordan, and S. Nolan
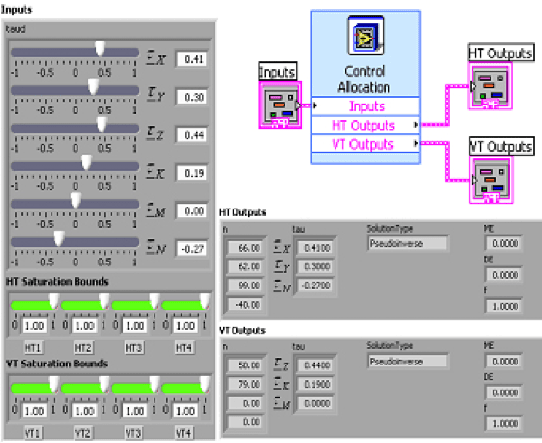
Fig. 7.13 Control Allocation Express VI
7.3.5 Autotuning of Low-level Controllers
Between successive ROV missions, it is likely that some onboard
instruments/sensors/equipment will be added/removed/replaced, leading to
changes in the dynamic properties of the ROV (mass, moments of inertia, drag
properties, etc.). Controllers optimally tuned for a particular vehicle configuration
will not give the optimal performance in the case of a change in configuration.
The autotuning of Low-Level Controllers (LLCs) is an advanced feature of the
control system, yielding optimal controller performance regardless of
configuration changes. It is recommended that the autotuning is performed at the
beginning of a mission. Autotuning algorithms described by Miskovic et al. [13]
have been expanded for six DOF controllers. The autotuning process is performed
for each LLC (surge, sway, heave, roll, pitch, yaw) separately and in the case of
the last four DOFs, involves the following steps:
1. generate self-oscillations;
2. wait for transient stage to be finished;
3. measure amplitude and period of steady-state oscillations;
4. find new values of controller gains using tuning rules.
A novel set of tuning rules for underwater applications has been developed
which provides the optimal performance of low-level controllers in the case of
Multi-mode Operations Marine Robotic Vehicle – a Mechatronics Case Study 117
configuration changes and presence of disturbances (waves and ocean currents).
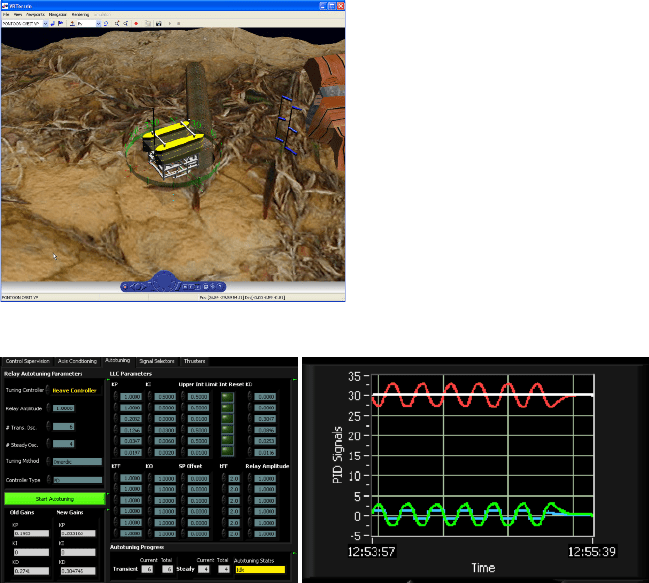
Autotuning of the Heave LLC is shown in Figures 7.14 and 7.15. The ROV is
oscillating (moving up and down) around a set point of 30 m.
Fig. 7.14 VR display during heave autotuning
Fig. 7.15 Autotuning parameters and real-time data monitoring
7.3.6 High Frequency Sonar Enabling at Seabed Operation
When operating in near-seabed mode for video camera footage acquisition, DVL
and altimeter sonar become unreliable due to the minimum blanking range of the
instruments (typically 0.5–1.0 m) and this is at the point of most threat from
seabed hazards. To give reliable height off bottom readings in this critical near-
seabed zone, special optical fibre whisker sensors [14] and high frequency (1
MHz) wide beam angle (30°) sonar which give range readings down to 2 cm [15]
have been developed.
118 D. Toal, E. Omerdic, J. Riordan, and S. Nolan
7.3.7 Interchangeable Inshore and Deep Water Winch System
The system has an ROV umbilical winch with a small footprint and weight
suitable for deploying the ROV from inshore vessels of opportunity. Depending
on survey boat size, the ROV is either towed to site (small boat) or craned in and
out of the water (medium sized boat). By design, the inshore winch system can be
swapped out with a second deep water ROV winch system and the overall system
operation remains unaffected enabling ROV operational flexibility from inshore to
the edge of the continental shelf. The winch is of an all-electric design. The
umbilical on this winch is specified to include 2x20 A, 250 VDC circuits, 3 x 5 A
220 VAC circuits, and four single-mode optical fibre cores.
Optical fibre passes are unusual on inshore ROV winch systems. However,
they are included to enable seamless switching from inshore (winch) operation to
deep water (winch) operation. The deep-water ROV umbilical winch allows for
deploying the ROV from vessels of opportunity. The winch can accommodate
1,500 m umbilical length.
7.4 System Testing
The integrated payload systems and navigation positioning instruments have all
been integrated and operated on previous surveys on ROVs and surface-towed
pontoons. The vehicle control systems, low level controllers, fault tolerant control,
and instrument controllers have been developed, integrated and tested in the
Virtual Underwater Lab, an integral part of the MPPT Ring [16] which facilitates
hardware in the loop testing. The systems have further been tested in a test tank at
the University of Limerick.
Payload sensor systems are integrated and prepared for marine offshore
operations in the test tank which facilities a full power-on wet test of the
integrated systems prior to mobilisation. Testing of the complete integrated system
(vehicle and payload sensors) is planned for Foynes Dock on the Shannon estuary
prior to trials onboard the vessel Celtic Explorer.
7.5 Conclusions
This chapter presents the concurrent development of the University of Limerick
thrusted pontoon/ROV, a novel, multi-mode of operation marine robotics vehicle,
and MPPT Ring, a novel development platform featuring easy integration of
survey equipment, efficient planning and mission simulation, training of ROV
pilots, fault-tolerant control of ROVs, enhanced operator environment and survey
tools during mission execution and offline analysis of acquired data. The main
Multi-mode Operations Marine Robotic Vehicle – a Mechatronics Case Study 119
features, architecture and implementation issues are described in a compact way.
The MMRRC is building a flexible multi-mode of operation survey vehicle
(thrusted pontoon/ROV) for surface and underwater operations based on the
technologies and the architecture proposed in this chapter.
The vehicle has been designed with operational flexibility as a key criterion for
high-resolution near-seabed survey from shallow and inshore coastal waters out to
the continental shelf edge. The vehicle can be operated in surface deployment
mode either as a towed platform or as a thrusted pontoon. With the release of
buoyancy modules, the vehicle becomes neutrally buoyant and is operated as a
survey class ROV depth rated to 1,000 m.
Special features of the system include deployment system interoperability with
interchangeable winch and umbilical systems for both small inshore boats and
larger research vessel deployment in offshore operations. The vehicle has many
other advanced features to allow near-intervention/near-seabed operation,
including fault tolerant thruster control, novel high frequency sonar enabling at-
seabed operation and onboard electronics and computer control enabling real-time
reaction to environmental change/disturbance. The vehicle is also deployed,
operated and pilot controlled with a topside augmented reality system, giving a
pilot interface benefiting from virtual environment enhancement of the real world
operating scenario. The first sea test trials are expected to be performed in Winter
2008.
References
1. Grehan A, Wilson M, Guinan J, Riordan J, Molnar L, Omerdic E, Ullgren J, Le Guilloux E,
Toal D, Brown C (2005) ROV Investigations of Cold-Water Coral Habitats along the
Porcupine Bank Margin, West Coast of Ireland. 3rd Int. Symp. on Deep-Sea Corals, Miami
2. Grehan A, Toal D, Brown C (2006) ROV Investigations of Cold Water Coral Habitats in the
Porcupine/Rockall off the west coast of Ireland. The Irish Scientist Yearbook, 14:96
3. Molnar L, Omerdic E, Toal D (2005) Design of advanced AUV for deployment close to
seabed and other hazards. Ocean 2005 Europe, Brest
4. Toal D, Omerdic E, Nolan S, Al-Shamma'a A (2006) Intervention AUVs for permanent
seabed observatories, addressing some of the key technical challenges, 4th IEEE Int.
Workshop on Scientific Use of Submarine Cables & Related Technologies, Dublin
5. Omerdic E, Riordan J, Toal D (2008) MPPT Ring – Multi-Purpose Platform Technologies
for Subsea Operations. IFAC Workshop on Navigation, Guidance and Control of
Underwater Vehicles, Killaloe
6. Ridao P, Batlle E, Ribas D, Carreras M (2004) NEPTUNE: A HIL Simulator for Multiple
UUVs, Oceans'04
7. Omerdic E, Riordan J, Molnar L, Toal D (2006) Virtual Underwater Lab: Efficient Tool for
System Integration & UUV Control Development, 7th IFAC Conf Manoeuvring & Control
of Marine Craft, Lisbon
8. Riordan J, Toal D (2008) Performance Optimised Reverberation Modelling for Real-Time
Synthesis of Sidescan Sonar Imagery, IEEE J. of Oceanic Engineering, In print
120 D. Toal, E. Omerdic, J. Riordan, and S. Nolan
9. Wilson MFJ, O’Connell B, Brown C, Guinan JC, Grehan AJ (2007) Multiscale Terrain
Analysis of Multibeam Bathymetry Data for Habitat Mapping on the Continental Slope.
Marine Geodesy, 30:3–35
10. Riordan J (2006) Performance Optimised Reverberation Modelling for Real-Time Synthesis
of Sidescan Sonar Imagery. Ph.D. University of Limerick
11. Thurman E, Riordan J, Toal D (2007) Automated Optimisation of Simultaneous Multibeam
and Sidescan Sonar Seabed Mapping, Ocean 2007 Europe, Aberdeen
12. Omerdic E, Roberts GN (2006) Control Allocation for Over-Actuated Thruster-Propelled
Underwater Vehicles, in Advances in Unmanned Marine Vehicles, IEEE publication
13. Miskovic N, Vukic Z, Barisic M, Tovornik B (2006) Autotuning Autopilots for Micro
ROVs. Proceedings of 14th Mediterranean Conf. Control and Automation (MED06),
Ancona
14. Toal D, Flanagan C, Lyons WB, Nolan S, Lewis E (2005) Proximal object and hazard
detection for autonomous underwater vehicle with optical fibre sensors. Robotics and
Autonomous Systems, 53(3-4):214–229
15. Nolan S, Toal D (2008) A low directivity ultrasonic sensor for collision avoidance and
station keeping on inspection-class AUVs. IMarEST Journal of Marine Engineering, Science
and Technology, Part A, In print
16. Omerdic E, Riordan J, Toal D (2007) Easing Offshore Ops Through the Use of Augmented
Reality Support Tools, Unmanned Underwater Vehicle Showcase, Southampton

Chapter 8
Wireless Communication Technology
for Modular Mechatronic Controllers
Glen Bright
1
, Nkgatho S. Tlale
2
and Christopher M. Kumile
3
8.1 Introduction
Modular mechatronic systems are comprised of mechatronic subsystems that are
functionally complete and can be independently operated. These subsystems can
be readily fitted and connected to, or in combination with, additional subsystems
[1]. Advantages of the modular mechatronic design of systems include flexibility
to changing environmental needs, low cost due to standardisation of the
subsystems, interconnect ability and interchangeability of subsystems with each
other, and improved system reliability due to modular architecture [2].
Communication technology allows for the systematic integration of
mechatronic subsystems in order to achieve a complex integrated mechatronic
system which would be difficult to achieve without the use of information
technology (IT). Communication technology allows for the remote, real-time
control of mechatronic systems, e.g., the use of communication to send control
signals from haptic device and feedback signals from a robotic manipulator in
robotics-aided surgery where the surgeon and patient are in different locations
(e.g., countries).
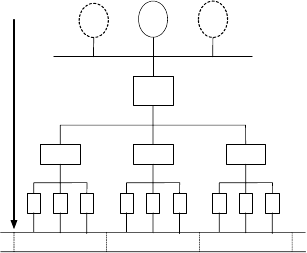
In Figure 8.1, three different levels of communications are illustrated. The
choice of communication technology to be used is dependant on the complexity,
size and response time requirements of the tasks to be controlled. It is important to
match the time delay of the communication system with the time constant of the
system/process being controlled. If the time delays of the communication system
are not an issue, high level protocols can be used to control low level system
components/subsystems. Generally, high level system tasks can be adequately
controlled by use of a high level communication protocol (e.g., ethernet), while
1
University of KwaZulu-Natal, South Africa
2
Council for Scientific and Industrial Research, South Africa
3
Tshwane University of Technology, South Africa
122 G. Bright, N.S. Tlale, and C.M. Kumile
low level system tasks are adequately controlled with a low level communication
protocol (e.g., CanBus).
Communication technology in mechatronic systems also allows the
achievement of distributed control. However, this results in communication lags
due to the distributed architecture. This further introduces problems that are
concerned with timing, such as the lag effect associated with zero-order hold
(ZOH) and problems with respect to motion control. Problems of time variation
can be addressed in control design, e.g., by using robust control so that deviations
from nominal timing can be tolerated [3]. This chapter focuses more on the
modelling of such systems before the controller is implemented, i.e., the
determination of the dynamics of mechatronic systems in order to determine the
correct controller reaction time.
Controlled process(es)
System components
}
}
}
}
}
}
}
}
Mechatronics subsystems
Level 2 communications
Mechatronics system
Level 3 communications
Other systems
Decreasing time delay
requirement
Level 1 communications
Fig. 8.1 Classification of different mechatronic and communications levels
8.2 Modular Mechatronic Controllers
Mechatronic controllers are generally embedded controllers that use some form of
model or heuristic rules for the underlying system in order to achieve optimal
control of the system by monitoring sensor inputs and adjusting actuator outputs.
The physical and software components of a mechatronic controller are then; signal
conditioning hardware unit, signal processing software unit, central processing
unit (CPU), power electronics unit, communication circuits and communication
software unit.
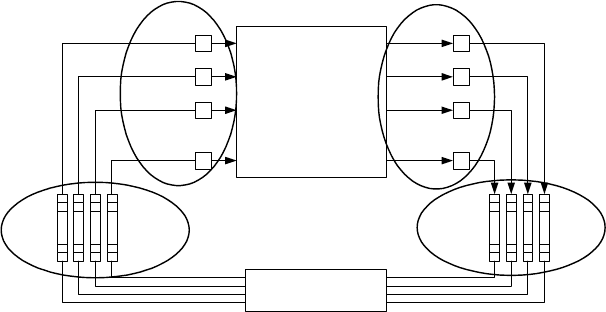
Figure 8.2 shows a multiple-input multiple-output (MIMO) mechatronic system
with sensors, controller and actuators controlling a system/process. The system
can be described by its state variables x(t). The actuators outputs, u(t), are the
inputs of the system, while the outputs of the system, y(t), are the inputs to
sensors. A SISO system is comprised of only one sensor and one actuator.
Wireless Communication Technology for Modular Mechatronic Controllers 123
u
1
(t)
u
2
(t)
u
3
(t)
u
n
(t)
y
1
(t)
y
2
(t)
y
3
(t)
y
n
(t)
System
x
1
(t), x
2
(t), .... , X
n
(t)
Controller
m-buffersn-buffers
n-actuators
m-sensors
Fig. 8.2 Mechatronic controller on a process level
The use of communication technology requires communication nodes at
sensors, controllers and actuator nodes. The communication network is used to
transmit the information between sensors, controllers and actuators. The
transmission of information over a communication network takes some time,
which leads to communication lags. In many cases, the communication lags are
varying in a random fashion.
Communication lags depend on the configuration of the network and the
scheduling policy used. Factors like the network load, priorities of the other
ongoing communications, and electrical disturbances affect the communication
lags [4]. The communication lag at time interval k can be subdivided into three
parts:
• the communication lags between the sensor and the controller,
sc
k
τ ;
• the computational lag in the controller,
c
k
τ ; and
• the communication lag between the controller and the actuator,
ca
k
τ .
The control delay,
k
τ , can then be defined as the time from when a sensor
receives a signal to when it is used in the actuator as the control signal. Thus,
ca
k
c
k
sc
kk
τ+τ+τ=τ . (8.1)
The Nyquist theorem states that the controller reaction time must be at least
half of the smallest time constant of the system to ensure proper system control
[5].
Depending on how the sensors, actuators, and controller nodes are
synchronised, several setups can be considered. Event-triggered controllers send
information as soon as it is available to the nodes (i.e., sensors and controllers).
The information is itself generated by some programmed activity (e.g., the signal
124 G. Bright, N.S. Tlale, and C.M. Kumile
being monitored achieving some specified level). Time-triggered systems transmit
the information based on some time model using the clock of the system as
reference. The node is able to start its activity at a pre-defined time (e.g., node’s
activities can be periodic). By implementing communication technology, a
distributed MIMO system can be achieved. Instead of centralising intelligence in
one controller, intelligence can be distributed on and between the different sensors
and actuators in the system.
Control and processing of data can only be done when data is available at the
node. Vacant sampling occurs when data does not arrive at the communication
node on time. To limit the level of vacant sampling, the buffers must be longer
than the worst case communication lag [6]. Buffering can be used between the
sensors, controllers, and actuators. This minimises the variation of the
communication lags between the communicating nodes and can be used to
produce constant communication lags. The disadvantage of using buffers is that
the control delay can become longer than necessary. This can lead to decreased
controller performance.
8.3 Communications Technology
Communications technology is used in mechatronic systems to achieve distributed
real-time control systems. The choice of the communication technology
implemented in a mechatronic system is dependent on the following:
• the spatial distances between the units of the system;
• the amount of information to be transferred via the communication technology
(or bandwidth); and
• the response time that is required from the communication technology.
For long distances (> 10 m, level 3 communication), communication protocols
such as the Transmission Control Protocol/Internet Protocol (TCP/IP), ProfiBus,
DeviceNet, FieldBus, Modbus, etc. are used [7]. These technologies are normally
used to connect one mechatronic system to a network of other mechatronic
systems. For medium distances (< 10 m, > 1 m, level 2 communications),
communication protocols such as the Controller Area Network (CAN), RS232,
RS485, RS422, GBIP, etc. are used. These protocols are also used in
instrumentation devices.
For short distances (< 1 m, level 1 communication), communication protocols
such as CAN, Inter-Integrated Circuit (I
2
C), Serial Peripheral Interface (SPI),
embedded TCP/IP, etc. are used. These protocols are normally used to connect
one microprocessor to others.
Wireless Communication Technology for Modular Mechatronic Controllers 125
8.4 Model-based Mechatronic Controllers
The difference between a model-based controller and a knowledge-based
controller is that the latter uses rules or heuristics, while the former uses some
model of the system in order to achieve control of the system.
For a SISO mechatronic system, let x(t) (= [x(t
1
), x(t
2
),…, x(t
n
)]) be a state variable
that can be used to fully describe a continuous-time varying system defined by f(t).
This infinite dimension system can then be described by Equation 8.2:
f(t) = g(x(t)). (8.2)
Let the controlled process be defined by:
)()(B)(A)( tttt vuxx ++=
(8.3)
where A is the state constant
B is the input constant
u(t) describes the input
and
v(t) is white noise with zero mean and has covariance R
v
.
The control loop of this mechatronic system can be formulated by sampling.
Assuming that the sampling period, h, is constant and greater than the delay from
the sensor to the actuator (i.e.,
ca
k
sc
k
ττh +> ). Integrating Equation 8.3 over a
sampling interval then results in Equation 8.4.
(
)
(
)
k1k
ca
k
sc
k1k
ca
k
sc
k0k1k
,, vuuxx +ττΓ+ττΓ+Φ=
−+
(8.4)
where
x
k
= x(kh) (8.5)
hA
e=Φ
()
∫
τ−τ−
=ττΓ
ca
k
sc
k
0
Aca
k
sc
k0
dB,
h
s
se
(8.6)
()
∫
τ−τ−
=ττΓ
h
h
sca
k
sc
k
se
ca
k
sc
k
dB,
A
1
(8.7)
and a variance of