Bradley D., Russell D.W. (eds.) Mechatronics in Action: Case Studies in Mechatronics - Applications and Education
Подождите немного. Документ загружается.

106 D. Toal, E. Omerdic, J. Riordan, and S. Nolan
Other system properties are highlighted in the following:
System Integration
• Check connection and make system integration before mission execution.
• Detect and resolve problems in advance.
• Find optimal positions for onboard equipment.
• Make fast connection with ship and ROV resources and save costly ship time.
Planning
• Build complex underwater scenarios using an expandable database of objects
(ROV and ship models), structures and custom components (moorings, buoys,
etc.).
• Prepare mission plan, including routes, trajectories and way points.
• Generate marketing “proof of concept” visualisations.
Simulation
• Simulate run-time behaviour in normal and critical situations under
disturbances (waves, currents, umbilical effect) using full 6 DOF real-time
simulators.
• Develop and test advanced fault-tolerant control system with autotuning
features.
• Use hardware-in-the-loop to evaluate the performance of embedded controllers.
• Simulate system response to different faults (thruster faults, leakage in the wet
bottle).
Training
• Provide real-feel training without exposing personnel and equipment to hazards
while simultaneously saving expensive ship-based training.
• Train pilots to control the vehicle in normal and harsh conditions, including
strong currents, waves, thruster faults and system errors with no risk of system
damage or loss.
• Provide interaction with dynamic objects using standard input interfaces.
Fault-tolerant Control
• Provide optimal and robust vehicle control in the fault-free case, which
minimises control energy cost function.
• In faulty cases, detect, isolate and accommodate faults by distributing control
energy among operable thrusters and continue missions with minimum loss of
performance and manoeuvrability.
Multi-mode Operations Marine Robotic Vehicle – a Mechatronics Case Study 107
• Using a set of aiding tools, allow operators to be more concentrated on other
tasks.
Enhanced Operator Interface and Auto-enhanced Survey Execution
• Expand existing operator display with real-time 3D VR visualisation.
• Create virtual view points and view the VR scene from different angles.
• Eliminate decision uncertainties due to bad visibility and harsh weather
conditions.
• Log run-time data for later replay and analysis.
• Synchronise sonars and ship auto-tracking based on real-time captured digital
terrain.
Offline Analysis
• Replay the mission looking at the scenario from any angle or viewpoint.
• Use advanced features of real-time simulators and statistical tools to calibrate
instruments and improve accuracy of sonar images.
• Determine factors that need to be improved to make future missions even
better.
The MPPT Ring thus has three innovative components which can function in a
stand-alone mode and/or be used in a fully integrated system. These are:
1. real-time simulator for high-resolution sonar mapping of survey scale
environments;
2. integrated ship and ROV operations assessment, planning, and execution tool;
3. offshore operations planning and real-time operation control tool.
7.2.2 The Virtual Underwater Laboratory
These developments are supported by the implementation of the Virtual
Underwater Laboratory or VUL [7]. This, a crucial component of the MPPT Ring,
is a mixed hardware/software augmented reality marine operations support tool
designed to resolve the weak points associated with traditional survey mobilisation
and operations strategies and to simplify overall system integration.
The VUL uses an open architecture, providing a framework for researchers to
develop, implement and test advanced control algorithms in a safe, simulated
environment before tests are performed in a real-world environment. The signal-
level compatibility between the simulated and real-world environment provides
the opportunity for rapid control prototyping and hardware-in-the-loop
development techniques to be used in system design.
108 D. Toal, E. Omerdic, J. Riordan, and S. Nolan
7.2.3 Architecture and Implementation
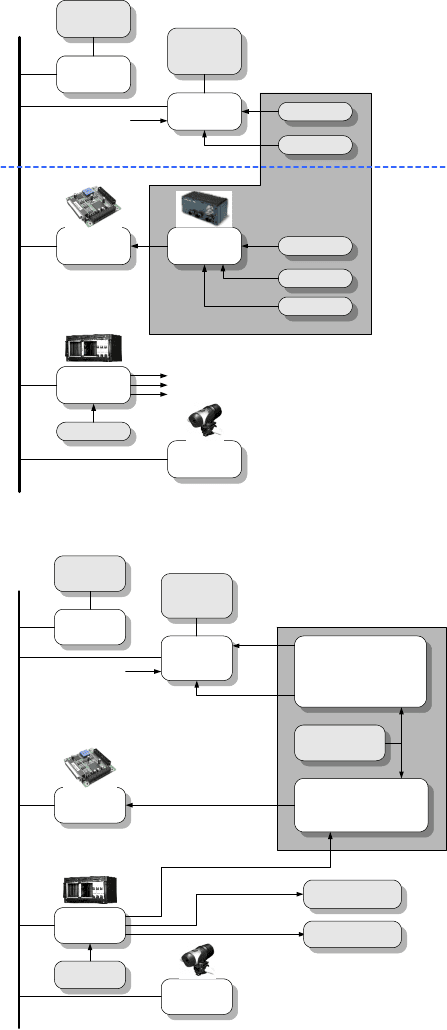
Interconnection between the VUL and existing ship and ROV resources, real-
world environment is shown in Figure 7.2. In the simulated environment, real-
world components from the ship (GPS1, GAPS) and the ROV (PHINS, external
sensors, power lines and leak detectors) are replaced with hardware/ software
simulators, as shown in Figure 7.3. More details about the roles, input/output
interface and function of the main hardware VUL components can be found in
Omerdic et al. [7].
All simulators are synchronised with real-time. Full 6 DOF vessel dynamic
models are implemented, including thruster DC-motor dynamics with non-
linearities such as saturation, slew-rate limiter, friction, non-linear propeller load
and so forth. Different components of ship and ROV simulators are simulated as
parallel loops executed with different speeds depending on the dynamics of
components. Payload imaging sonars are simulated remotely on a dedicated PC.
The inputs to and outputs from the virtual instruments (simulators) are compatible
with corresponding real-world instruments at the signal level. In this way, all
communication delays and latencies are present during the control design stage
which then provides a framework to support the design of robust control systems
in a realistic environment.
All software is implemented in LabVIEW, Matlab and Visual Studio C++.
Data (outputs of individual components) are bundled into clusters and transmitted
using network-published shared variables based on the National Instruments
Publish-Subscribe Protocol (NI-PSP). The NI-PSP protocol uses less network
bandwidth and is more efficient than TCP/IP for the given requirements of the NI-
PSP protocol. However, unlike the User Datagram Protocol (UDP), the NI-PSP
protocol guarantees delivery by implementing an additional layer of functionality
on top of the raw UDP structures.
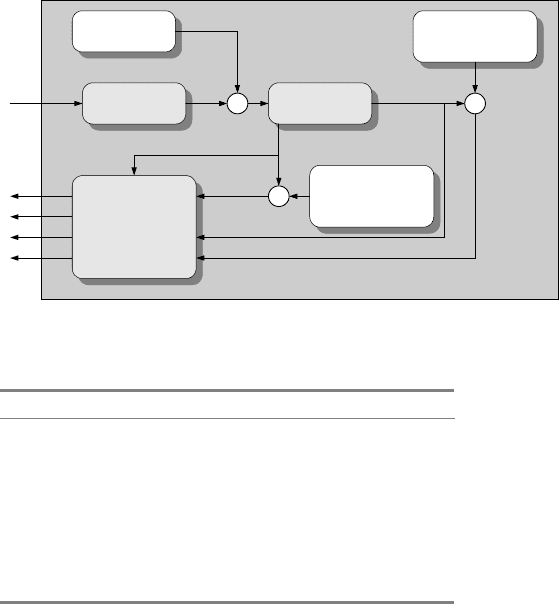
A simulation block diagram including ROV dynamics and kinematics is given
in Figure 7.4. If desired, system states can be “contaminated” with sensor noise.
Hence, in the simulated environment, two types of navigation data are available:
noise-free and noisy data (states). However, only noisy data are available in the
real-world environment. Real-time access to noise-free and noisy data in
simulation mode provides tools to investigate the influence of sensor error
measurements on the performance of the overall control system and to assess the
quality of side-scan and multibeam imagery [8, 9].
Multi-mode Operations Marine Robotic Vehicle – a Mechatronics Case Study 109
Real-Time
Visualisation
Navigation PC
(Multi-beam)
Real-Time
Virtual Reality
Visualisation
Control PC
(Visualisation)
Hand Control Unit
(ROV pilot)
PC104 PHINS
Compact RIO
Compact
Vision
GPS1
GAPS
DVL
Depth Sensor
USBL
Leak detectors
To actuators
To cameras & lights
To power switches
Water
line
Ethernet
Fig. 7.2 VUL in real-world environment
Real-Time
Visualisation
Navigation PC
(Side-scan
Simulator)
Real-Time
Virtual Reality
Visualisation
Control PC
(Visualisation
& Mission
Control)
Hand Control Unit
(ROV pilot)
PC104
Ship Simulator
(Dynamic Model, Propulsion
System, Control Allocation,
Control System)
Compact RIO
Compact
Vision
Leak detectors
Simulator
To actuators
To cameras & lights
To power switches
Ethernet
GAPS
Disturbances
(Waves, Currents,
etc.)
GPS1
ROV Simulator
(Dynamic Model, Propulsion
System)
Cameras & Lights
Simulator
Power Switch
Simulator
PHINS
Simulator PC
Fig. 7.3 VUL in simulated environment
110 D. Toal, E. Omerdic, J. Riordan, and S. Nolan
Disturbances
(Waves, Currents)
Propulsion
System
Serial
Interface/Protocol
Selector
ROV Dynamic
Model
Sensor Noise Model
(Linear & Angular
Velocities)
Sensor Noise Model
(Position &
Orientation)
n τη
η
η*
η*
ν*
ν
+
+
+
+
+
+
ROV Simulator (Simulator PC)
Fig. 7.4 ROV dynamics and kinematics simulation loop
Table 7.1 Implemented serial output protocols
ASCII output protocols Binary output protocols
Gyrocompass DORADO OUT
Gyrocompass II Simrad EM
HYDROGRAPHY Navigation Short
INDYN Control
OCTANS Standard
PHINS Standard
POSIDINIA 6000
A serial output interface is used to transform noise-free and noisy states into
INS-compatible messages which are sent through available communications ports.
Currently, seven ASCII and four binary output protocols have been implemented,
as indicated in Table 7.1.
7.2.4 Imaging Sonar Simulator
While mathematical models to simulate the pertinent physical processes governing
subsea acoustic imaging have existed for decades, to date, no instance of a PC
based real-time sonar simulator has appeared commercially [10]. This is a direct
result of the limited computational capacity of PC technology combined with both
the massive scale of the oceanographic databases required to initialise and
evaluate meaningful mission scenarios and the numerically intensive nature of
acoustic simulation models. Capable of processing only a minute fraction of the
acoustic transmission-reception cycle in real-time, an hour of simulation time may
typically translate to one minute of real-time using current state-of-the-art acoustic
Multi-mode Operations Marine Robotic Vehicle – a Mechatronics Case Study 111
simulation technology [10]. Consequently, existing sonar simulation models
operate in simple idealised environments and do not address the complexity of the
environmental model or they operate offline.
Both instances represent significant drawbacks for the end user as the key issue
with marine systems modelling and simulation is the capability to rapidly and
exhaustively test the effectiveness of proposed methodologies in a realistic model
of the underwater operating environment. For cost-effective sonar research,
education, and offshore training applications, the ideal solution is a single
integrated model with the requisite resolution and fidelity to accurately perform
real-world representative simulation in real-time on commercial-off-the-shelf PC
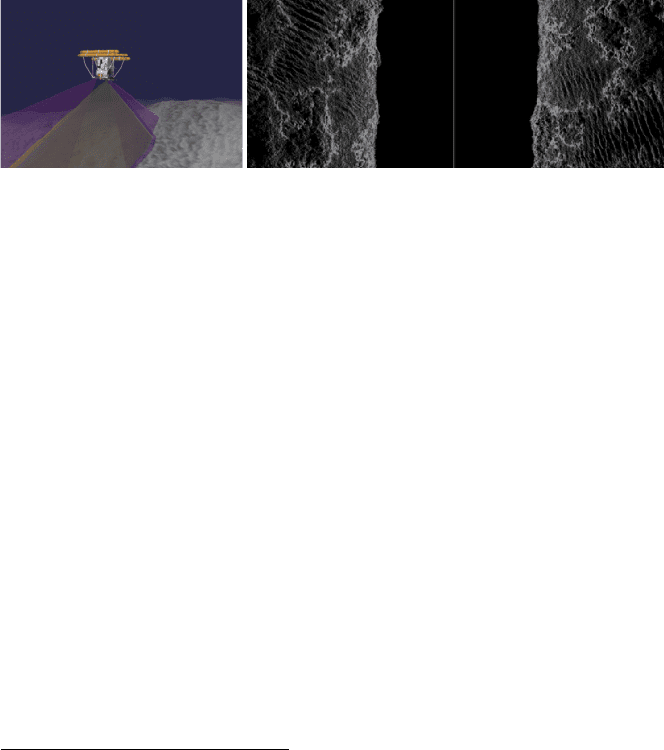
technology. Synthetic side-scan sonar imagery generated by simulator is shown in
Figure 7.5.
Fig. 7.5 Synthetic side-scan sonar imagery generated by simulator
7.2.5 Laboratory Configuration
The laboratory interconnection of the VUL components is shown in Figure 7.6.
Two VUL applications run in parallel on the control PC. The first is the Graphical
User Interface (GUI) of Figure 7.7 for an ROV pilot using a joystick, keyboard
and mouse for interaction with the GUI. The second is the Virtual Reality display
of Figure 7.8, used to visualise a VR scene
2
in real-time, using measurements from
virtual sensors (simulation environment) or real sensors (real-world environment).
Figure 7.9 displays a part of the main screen of the ROV simulator. A part of the
PC104 display is shown in Figure 7.10. This display is not available in the real-
world environment. However, the PC104 can be accessed and remotely
administered from the Control PC through the network using the remote
administrator.
2
Ship, ROV, ocean surface, seabed and so forth
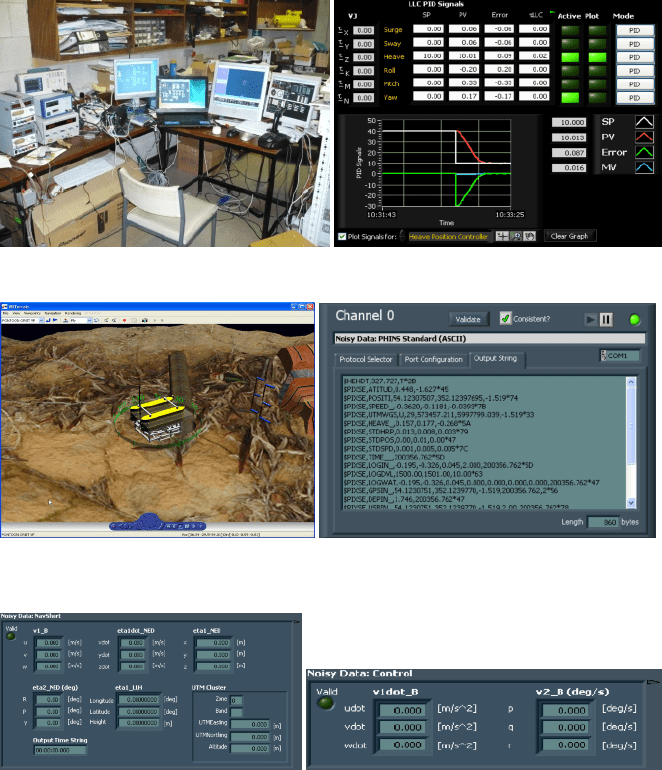
112 D. Toal, E. Omerdic, J. Riordan, and S. Nolan
Fig. 7.6 VUL – Overall lab setup Fig. 7.7 VUL – GUI (Control PC)
Fig. 7.8 VUL – Virtual Reality display Fig. 7.9 VUL – ROV simulator (Control PC)
(Control PC)
Fig. 7.10 VUL – PC104 shared data
7.3 University of Limerick (UL) Thrusted Pontoon/ROV
7.3.1 Base Vehicle
The Thrusted Pontoon/ROV is a multi-mode of operation vehicle. It can be
operated on the surface (Figure 7.11) as a survey platform either towed (by an
extra towing cable) or thrusted by 4 horizontal thrusters to allow surge, sway and
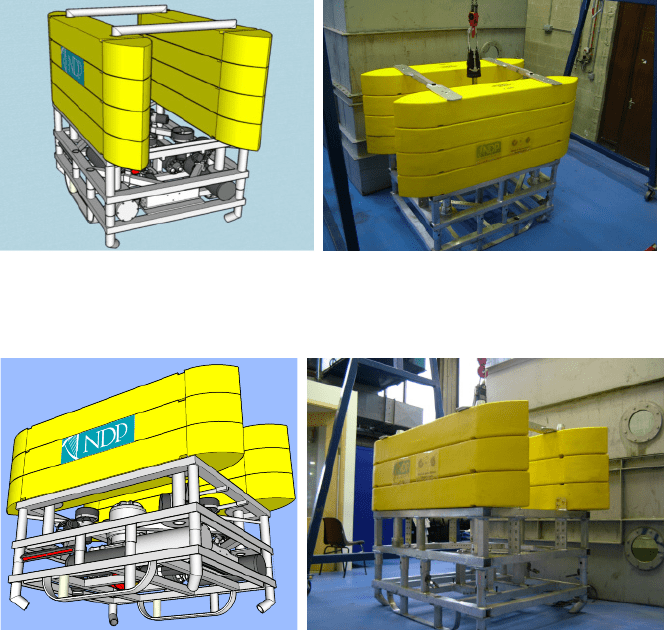
Multi-mode Operations Marine Robotic Vehicle – a Mechatronics Case Study 113
yaw which is useful in confined spaces or near hazards where a boat and tow
cannot operate. It can also be operated as an ROV (Figure 7.12). In these various
modes of operation, it is used in conjunction with an umbilical and associated
winch; the umbilical carrying vehicle power, control and data from sensors and
instruments.
(a) (b)
Fig. 7.11 Model (a) and real vehicle (b) with surface operation buoyancy configuration –
positively buoyant
(a) (b)
Fig. 7.12 Model (a) and real vehicle (b) with ROV operation buoyancy configuration – neutrally
or marginally positive buoyancy
In the surface-tow or surface thrusted modes of operation, overall vehicle
buoyancy is maintained strongly positive by 8 buoyancy modules mounted on the
pontoon upper frame. While in surface-tow mode, a “Quick Release” arrangement
allows the two top most buoyancy modules to be detached from the vehicle,
reducing overall vehicle buoyancy to neutral or slightly positive. The vehicle can
then be operated in ROV mode for submerged survey with control in six degrees
of freedom (surge, sway, yaw, heave, pitch and roll). The syntactic foam
buoyancy modules are depth rated to 1,000m, while all the other components
114 D. Toal, E. Omerdic, J. Riordan, and S. Nolan
integrated on the vehicle including payload sensors are depth rated beyond
2,000m.
The vehicle is designed and constructed in modules. This is for ease of
handling in inshore surveys on small boats with small crews and each component
in this modular design (buoyancy modules, upper frame, lower tool skid, etc.) is
kept to a two man dry weight lift. The upper frame mounts eight thrusters – four
horizontal and four vertical. The lower tool skid frame caries the payload sensors.
7.3.2 High-resolution Imaging Tool Skid
The sensor systems integrated on the survey tool skid include: black and white and
colour video cameras, Reson 7125 multibeam sonar, Tritech side-scan sonar and
an ixSea fibre gyro-based navigation system with Kalman filter and aiding sensors
(RDI DVL, Digiquartz pressure depth sensor). When deployed off research
vessels in deep operations, a transponder for USBL acoustic positioning is also
integrated on the vehicle to give the best possible navigation/positioning up to
target depths of 1,000 m. The multibeam and side-scan sonar pings are controlled
centrally to avoid the instruments’ transmission reception cycles interfering with
each other [11].
7.3.3 Onboard Electronics and Computer Control
Electronics and controllers (two PC104 controllers and National Instruments
Compact RIO system) are included within wet bottles on the vehicle rather than
on the topside. This facilitates real-time control loop operation without the latency
of the communications channel/network to the surface. All parameters are
monitored topside and command level instructions communicated to the onboard
controllers.
Another advantage of this onboard controller setup is that it facilitates
autonomous vehicle development experimentation for near-intervention scenarios
without the risk of loosing expensive AUV systems. AUV development testing
can thus be performed on the vehicle while tethered and operations can be
monitored from the surface.
Electronics, controls and sensor systems are integrated across four computer
networks for reasons of separation of the time critical control functionality,
payload sensor system control and data logging and high bandwidth imaging sonar
requirements. These networks are as follows:
Net1 – Reson Multibeam Network (Bespoke). The 7125 multibeam system as
supplied calls for a dedicated network to provide deterministic latency for fusion
of sonar imagery and motion reference data.
Multi-mode Operations Marine Robotic Vehicle – a Mechatronics Case Study 115
Net2 – Control and Navigation Network (100BaseT): Devices on this network
include National Instruments Compact RIO system for low-level control and I/O
interface with devices (leak detectors, cameras and actuators), National
Instruments Compact Vision system and a PC-104 for control.
Net3 – Survey Network (1000BaseT): Devices on this network include: PC-104
for sensors (video and sonars); 8 x serial I/O channels; 4 x video channels for
ROV composite/HD cameras.
Net4 – Video Network Option: 4 x video channels for extra science payload
camera expansion.
7.3.4 Fault Tolerant Thruster Control
A hybrid control allocation approach [12] is implemented inside the Control
Allocation Express VI (Figure 7.13). In the fault-free case, optimal control
allocation is guaranteed for all possible command inputs since the hybrid approach
for control allocation finds the exact solution on the entire attainable command
set. This solution is optimal in that it minimises a control energy cost function, the
most suitable criteria for underwater applications.
In fault situations, the fault diagnosis part of the system immediately detects
and isolates any fault in a thruster using fault detection units and delivers
knowledge about faults in the form of a fault indicator vector. The fault
accommodation part of the system uses this vector to accommodate the fault and
eventually switch off the faulty thruster. At the same time, control reallocation is
performed by redistribution of control energy among remaining operable thrusters
such that the mission can be continued with a minimal loss of control
performance. All inputs to the Control Allocation Express VI are normalised to
standard intervals. Depending on user-defined settings inside the dialog box, the
outputs (actuator settings) can be compensated for non-symmetrical propeller T-
curves and adapted (scaled and/or rounded, if necessary) to meet requirements of
thruster input interfaces. Degree of usage of each thruster is controlled by sliders
HT (VT) Saturation Bounds. The position of these sliders is determined by the
ROV pilot or fault diagnosis system depending on the state of thrusters (healthy,
partial fault or total fault).