Большаков В.Д., Маркузе Ю.И. Практикум по теории математической обработки геодезических измерений
Подождите немного. Документ загружается.

Поправки VI вычислены в табл. 147 по формуле (5.54). В табл. 148 вычисля-
ем уравненные углы и остаточные невязки треугольников*. В табл. 149 и
150 вычислены остаточные невязки условий известного угла и базисного.
Оценка точности. 1. Средняя квадратическая ошибка измерения
одного
2. По формуле (5.60), учитывая, что
N<=(0,80 1,46 0 1,46 —4,24), Ф = —1,46,
находим
цепка 1 и Ч Н ц 1 Л. 1. ч^я
угла т = 2,9".
(Л^ = (—0,133 —0,884 0,019 0,857 —0,394 2,031) X
1 /
р
~ = (—
1
.
440
> =
6
-
372
+
1
-
440
=
7
.
812
-
р
Далее вычисляем
т
1е5
=^2,9 |/7,812 =8,1 (ед. 6-го знака логарифма)
от,, _
т
1
К
1 _ 8,1 _ 1
И
з М 0,43-10
е
53000
(в задаче 4.23 получено /л
8
/а = 1/61 000).
3. Средняя квадратическая ошибка неизвестного г (угла
= 2,9 У 1,195 = 3,2"
У4
(величина 1,195 есть взятый со знаком «+» последний диагональный элемент
матрицы Л^
1
,
что
следует из (5.58).
5.20. В предыдущей задаче решить систему уравнений (5.52) и выполнить
оценку точности функций по схеме Гаусса и методом квадратных корней.
5.21. Выполнить уравнивание по способу условий с дополнительными неиз-
вестными в условиях задач 4.23, 4.26 и 4.27, приняв соответственно неизмерен-
ными углы </„, у
2
, у
х
.
Способ условий с дополнительными неизвестными применяют для уравни-
вания геодезических сетей при наличии в измерениях систематических ошибок,
которые вводят как дополнительные неизвестные [при параметрическом способе
уравнивания их также вводят в качестве неизвестных (см. § 33)].
Так, например, полагая, что в условиях задачи 4.23 каждый угол был отя-
гощен постоянной систематической неизвестной нам ошибкой с, получим услов-
ные уравнения
+
У
2
+ + ?
с
+ = 0;
ч + о» + +
3
° + = о;
о, + «
8
+ о
9
+ ?б + = 0; (5.62)
+
у
5 + Зо + щ = 0;
VI — 1,80о
3
+ 1,46^4 — 0,79ц, + 3,15и,— 2,26у
9
+ 0,76с + го
6
= 0.
* Измеренные углы ух и г
(0)
= приведены в табл. 150.
304
I

Допустим, что измеренные углы получены равными у
{
+ с, где с = 1", а у
{
при-
ведены в задаче 4.23. Тогда будем иметь новые невязки
0)1
= 5,4 + 3,0 = 8,4;
и>
2
= -7,Г+3,0 = -4,1;
^3 = 4,5 + 3,0 = 7,5;
что следует из уравнений (5.62).
Как и в задаче 4.21, получим матрицу
Ы
=
щ = 3,2 + 3,0 = 6,2;
т
ъ
= 10,8 + 0,7= 11,5,
Матрица Р = (3 3 3 3 0,76), что также следует из системы (5.62).
Обращая матрицу
N1
О/
на ЭВМ «Наири-К», получим матрицу
[0,2801 —0,0583 — 0,0591 —0,1653 0,0105
+ 0,2811 —0,0513 — 0,1682 — 0,0124
0,2932 — 0,1687
0,5008
-1
N. =
— 0,0159
0,0059
0,0468
0,1111
0,1111
0,1111
0
О
— 0,1111
) = — (— 1,243 + 3,211 —0,611 — 1,208 — 0,590— 1,
310)
т
Далее вычисляем вектор
(*
По формуле (5.54) находим поправки
о = (— 1,83 — 2,45 — 0,18 2,35 2,00 3,67 — 2,47 — 1,82 + 0,72)
т
.
Уравненные значения углов будут
У1=У1+Щ + ~г-
Следовательно, при уравнивании триангуляции постоянная систематическая
ошибка полностью погашается. Этот вывод можно получить и теоретическим пу-
тем.
Заметим, что вычисленная величина с — —1,3" оказалась достаточно близ-
кой к с = 1" даже при небольшом числе избыточных измерений.
Оценка точности. 1. Величина [то] = —[ки/] = 42,40. Средняя
г = п — к = 4,
квадратическая ошибка т = ^/^^2,40 _ з
Де
сь
так как к = 4 + 1 = 5.
Отметим, что если величины
"у
1
получены не искаженными систематическим
влиянием, то средняя квадратическая ошибка т
с
искажена максимально и ха-
рактеризует не точность самих измерений в смысле оценки дисперсии О =
= М[(Х — Мх)
2
], а точность результатов измерений относительно их истинных
305.
•значений, т. е. И = М[(Х — Х
ист
)
2
]. Поэтому можно написать т
2
с
= т
ъ
+ с
2
,
откуда
—? = 10,6— 1,72 = 8,88"; т = 3,0".
Напомним, что в задаче (4.2) получено т = 2,9'".
2. Средняя квадратическая ошибка т
с
= 3,0''У 0,111 =• 0,99".
3. Как и в предыдущей задаче, найдем р^г. При этом
Щ= (0,80 0 0 1,46 — 6,372);
Ф = [/]= +0,80; % = 8,503.
Согласно формуле (5.60) вычисляем
(Щ Ф) Л^
1
^^ = (0,005 —0,047 —0,103 0,331 —0,281 0) = 2,279;
— = 8,503 — 2,279 = 6,224.
р
Далее т? = /п, = 3,0 /6,224 = 7,48 и
т
3
7-48 1_
з ~~ 0,43-10
е _
57 000 '
5.22. Решить систему (5.62) по системе Гаусса с оценкой точности функции
« величины с.
5.23. Уравнять по одному из вариантов задач 4.23, 4.26, 4.27 углы, исказив
•их систематической ошибкой по указанию преподавателя.
§ 48. УРАВНИВАНИЕ КОРРЕЛИРОВАННЫХ ИЗМЕРЕНИЙ
Результаты непосредственных измерений чаще всего являются не-
коррелированными величинами. Но в математическую обработку мо-
гут включаться не сами измерения, а их функции, например углы,
вычисленные по независимо измеренным направлениям, предвари-
тельно уравненные измерения или их функции, например дирекци-
онные углы сторон, приращения координат и др. Поэтому возникает
задача уравнивания коррелированных измерений. Во всех этих слу-
чаях необходимо знать матрицы их обратных весов <Э или весов р,
которые в отличие от случая некоррелированных измерений уже не
будут диагональными. Метод наименьших кадров в применении к не-
коррелированным измерениям называют классическим, а к коррели-
рованным — обобщенным.
При уравнивании коррелированных измерений необходимо при-
менять матричную форму записей и вычислений. Так, параметриче-
ский способ сводится к составлению нормальных уравнений
КАх +6 = 0, (5.63)
где матрицы равны
К = А
Т
РА, (5.64)
"306
Ь = А
т
РЬ.
(5.65>
Лемма Гаусса имеет вид А
7
РУ = 0.
В коррелатном способе имеем матричное нормальное уравнение
+ № = 0, (5.66)
N = В(}В
Т
, (5.67)
V = (2Я
Т
/С. (5.68)
Как видим, основные формулы в матричной записи те же, что и в
классическом способе уравнивания, с той лишь разницей, что матрица
Р недиагональная. Поэтому все алгоритмы Гаусса, включающие вес,
уже не имеют места. Они могут быть сохранены условно лишь о
| целью решения системы нормальных уравнений в схеме Гаусса и
метода квадратных корней.
Легко заметить, что применение параметрического способа урав-
нивания требует знания матрицы Р, а коррелатного —
С?
= Р'
1
. По-
этому выбор способа зависит от того, какая матрица имеется: Р или
Я-
Таблица 151
Номера измерений
Номера
углов
! 2
3
4 5
6
7
8
9
1
2
3
4
5
6
7
8
9
1
—0,5
1
—0,5
1
1
—0,5
—0,5
1
—0,5
—0,5
1
1
—0,5
1
—0,5
1
-
Таблица 152
Номера
урав-
нений
Номера измерений
Номера
урав-
нений 1 2 3 4
5 6
7
8 9
1
2
3
4
5
1
1,00
1
1
1
—1,80
1
1,46
1
1
1
—0,79
1
+3,15
1
1
1
—2,26
6
—1,00
1,80
—1,46 1,46
где
и вектор поправок
307.
Для иллюстрации решим следующие задачи.
5.24. Уравнять углы в триангуляционном построении в условиях задачи 3.39.
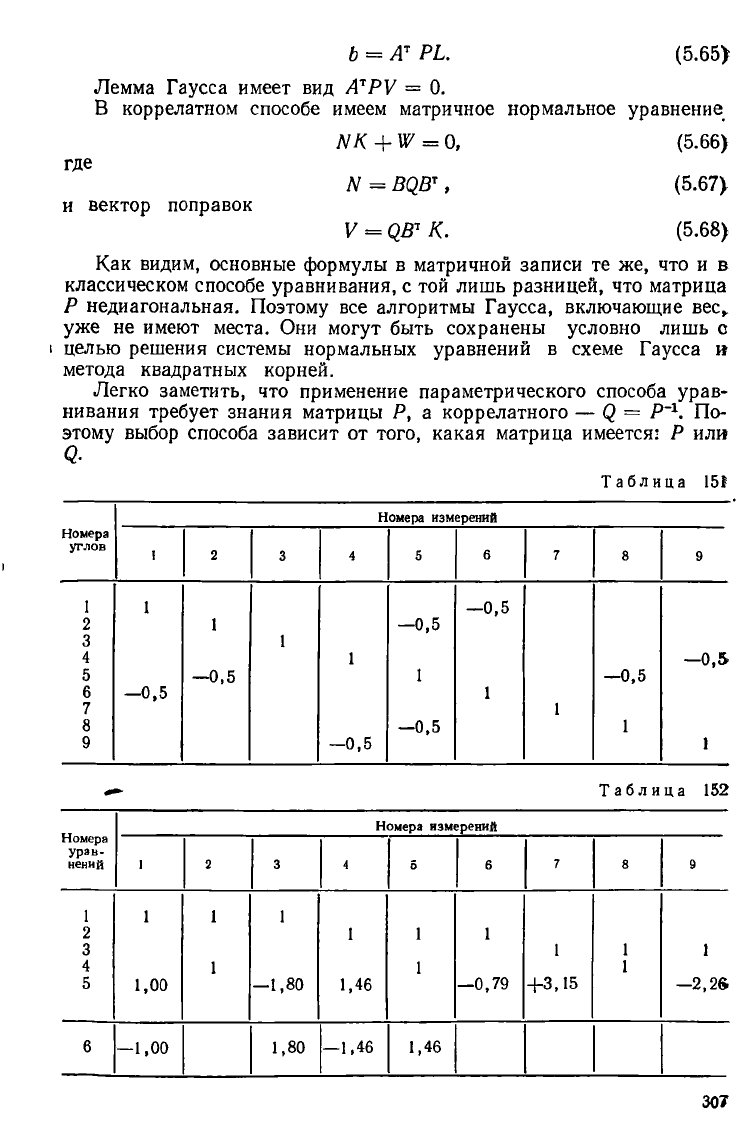
Решение. Используя результат решения задачи 1.225, составляем мат-
рицу обратных весов углов, вычисленных как разности направлений, помещен-
ную в табл. 151.
Поэтому будем применять коррелатное уравнивание. Матрицу В{ коэффи-
циентов условных уравнений (расширенную снизу строкой коэффициентов функ-
ции /) поместим в табл. 152 (см. задачу 4.23).
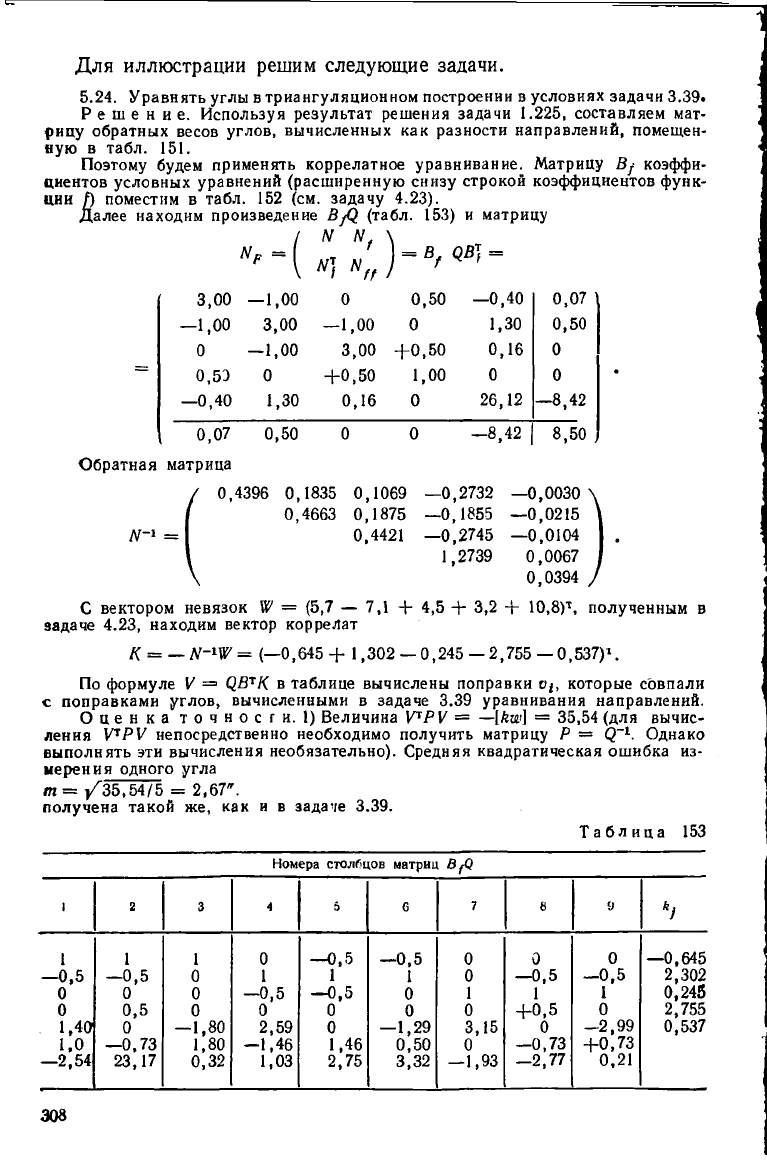
Далее находим произведение В/2 (табл. 153) и матрицу
N N ^
N. =
= в
г
ОВ] =
3,00 —1,00
0 0,50
—0,40
0,07
—1,00 3,00 —1,00 0
1,30
0,50
0
—1,00
3,00 +0,50 0,16 0
—
0,5Э 0 +0,50
1,00
0
0
—0,40 1,30 0,16 0
26,12
—8,42
0,07
0,50
0 0
—8,42
8,50
Обратная
матрица
0,4396 0,1835 0,1069 —0,2732
0,4663 0,1875 —0,1855
0,4421 —0,2745
1.2739
полученным в
—0,0030
—0,0215
#-•=
1
0,4421 —0.2745 —0,0104
0,0067
0,0394
С вектором невязок № = (5,7 — 7,1 + 4,5 + 3,2 + 10,8)\
задаче 4.23, находим вектор коррелат
К = — (—0,645 + 1,302 — 0,245 — 2,755 — 0,537)\
По формуле V = О.В^К в таблице вычислены поправки о/, которые совпали
с поправками углов, вычисленными в задаче 3.39 уравнивания направлений.
Оценка точности. 1) Величина У*РУ = —[А®] = 35,54 (для вычис-
ления УРУ непосредственно необходимо получить матрицу Р = С
-1
. Однако
выполнять эти вычисления необязательно). Средняя квадратическая ошибка из-
мерен
и
яодного угла
т = /35,54/5 = 2,67".
получена такой же, как и в задаче 3.39.
Таблица 153
Номера столбцов матриц
1
2
3
4 5
6
7
8 9
Ч
1
1 1 0
-0,5
—0,5 0 0
0
—0,645
—0,5 —0,5 0 1
1
1
0
—0,5
—0,5
2,302
0
0
0 —0,5
—0,5
0
1
1
1 0,245
0
0,5
0
0 0
0
0
+0,5 0
2,755
1,40 0 —1,80 2,59 0
—1,29 3,15 0
-2,99
0,537
1.0
—0,73 1,80
-1,46
1,46 0,50
0
-0,73
+0,73
—2,54 23,17
0,32 1,03 2,75 3,32 —1,93
—2,77
0,21
308.
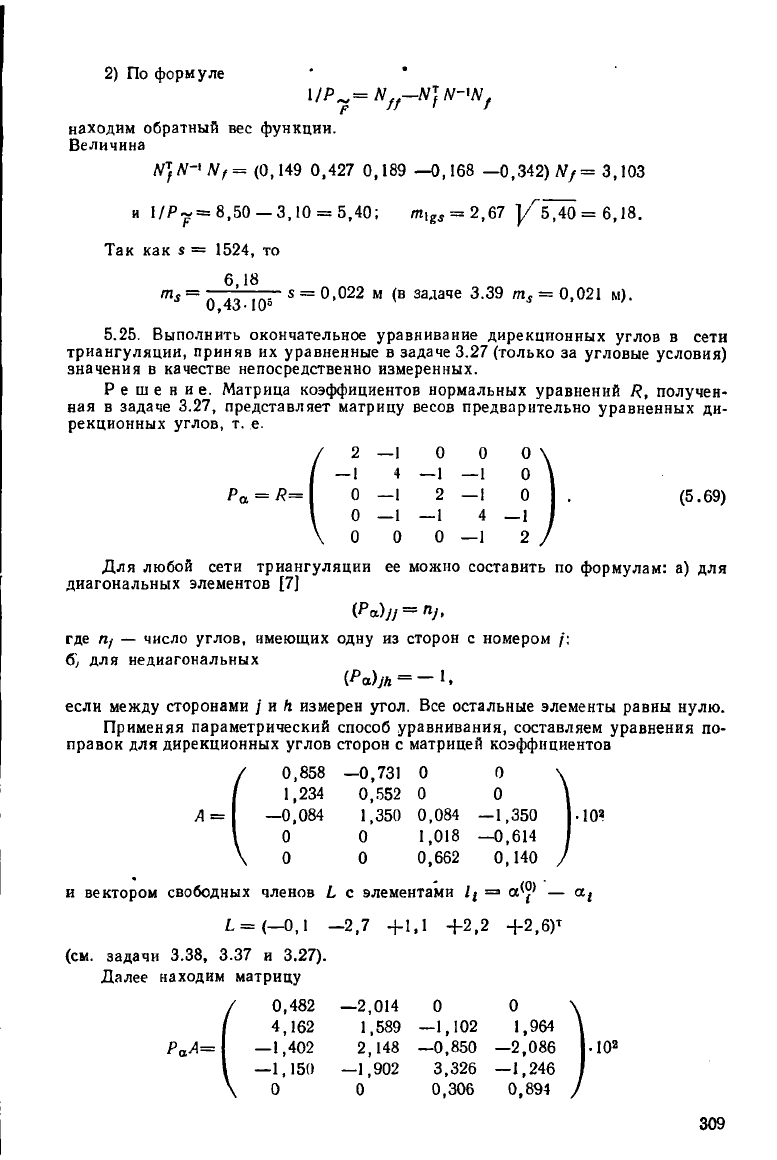
2) По формуле
1 //>_ = N ,,—N1 ,
р //
1
*
находим обратный вес функции.
Величина
= (0,149 0,427 0,189 —0,168 —0,342)^=3,103
и 1/Р~=8,50 —3,10 = 5,40; «1^ = 2,67 ]/5/Й) = 6,18.
Так как 8 = 1524, то
6,18
0,43-10
5
« = 0,022 м (в задаче 3.39 т
я
= 0,021 м).
5.25. Выполнить окончательное уравнивание дирекционных углов в сети
триангуляции, приняв их уравненные в задаче 3.27 (только за угловые условия)
значения в качестве непосредственно измеренных.
Решение. Матрица коэффициентов нормальных уравнений К, получен-
ная в задаче 3.27, представляет матрицу весов предварительно уравненных ди-
рекционных углов, т. е.
Ра = Л= • (5.69)
Для любой сети триангуляции ее можно составить по формулам: а) для
диагональных элементов [7]
(Ра) л = п
}
,
где П/ — число углов, имеющих одну из сторон с номером /:
б) для недиагональных
(Я
а
)у
й
= -1,
если между сторонами / и Л измерен угол. Все остальные элементы равны нулю.
Применяя параметрический способ уравнивания, составляем уравнения по-
правок для дирекционных углов сторон с матрицей коэффициентов
А = •10?
и вектором свободных членов Ь с элементами Ц = а*®' — а
г
Ь = (—0,1 —2,7 +1,1 +2,2 +2,6)
т
(см. задачи 3.38, 3.37 и 3.27).
Далее находим матрицу
0,482
4,162
Р
а
А= | —1,402 2
•
10
2
—1,150
0
309.
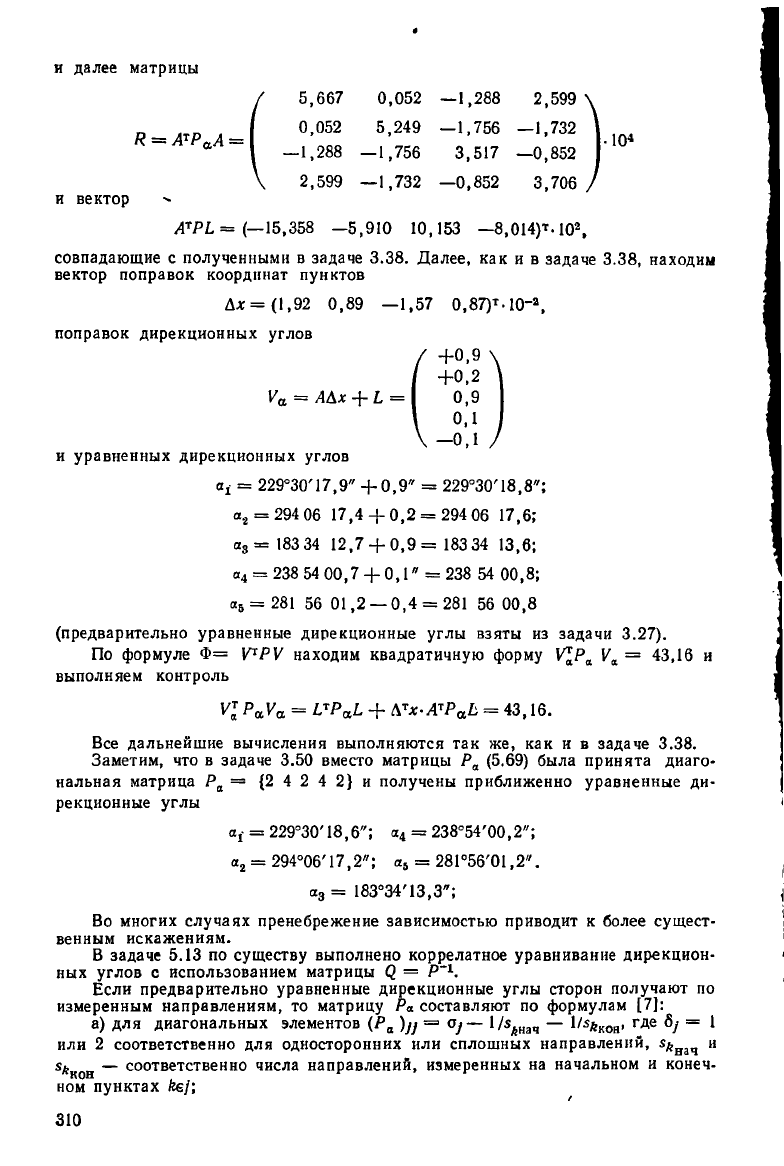
и далее матрицы
К = Л
т
Р
а
Л =
и вектор
А^РЬ = (—15,358 -5,910 10,153 — 8,014)*. 10
2
,
совпадающие с полученными в задаче 3.38. Далее, как и в задаче 3.38, находим
вектор поправок координат пунктов
Д* = (1,92 0,89 —1,57 0,87)*. К)-
2
,
поправок дирекционных углов
У
а
= ААх + I =
и уравненных дирекционных углов
01 = 229°30'17,9" +0,9» = 229°30'18,8";
а.
г
= 294 06 17,4 + 0,2 = 294 06 17,6;
а
3
=
183
34 12,7 + 0,9=
183
34 13,6;
а
4
= 238 54 00,7 + 0,1" = 238 54 00,8;
а
5
= 281 56 01,2 — 0,4 = 281 56 00,8
(предварительно уравненные дирекционные углы взяты из задачи 3.27).
По формуле Ф= УРУ находим квадратичную форму У
а
= 43,16 и
выполняем контроль
К РаУа = ^Р^ + &
т
х-А
т
Р
а
Ь = 43,16.
Все дальнейшие вычисления выполняются так же, как и в задаче 3.38.
Заметим, что в задаче 3.50 вместо матрицы Р
а
(5.69) была принята диаго-
нальная матрица Р
а
= {2 4 2 4 2} и получены приближенно уравненные ди-
рекционные углы
<*!•
= 229°30'18,6"; а
4
= 238°54'00,2";
а
2
= 294°06'17,2"; а
5
= 281°56'01,2".
а
3
= 183°34'13,3";
Во многих случаях пренебрежение зависимостью приводит к более сущест-
венным искажениям.
В задаче 5.13 по существу выполнено коррелатное уравнивание дирекцион-
ных углов с использованием матрицы (2 = Р~
1
.
Если предварительно уравненные дирекционные углы сторон получают по
измеренным направлениям, то матрицу Ра составляют по формулам [7]:
а) для диагональных элементов (Р
а
)]]= О/— 11$
ктч
— 1/5й
кон
, где б
у
- = 1
или 2 соответственно для односторонних или сплошных направлений, 5#
нач
и
5
*кон
—
соответственно числа направлений, измеренных на начальном и конеч-
ном пунктах ке/;
310.
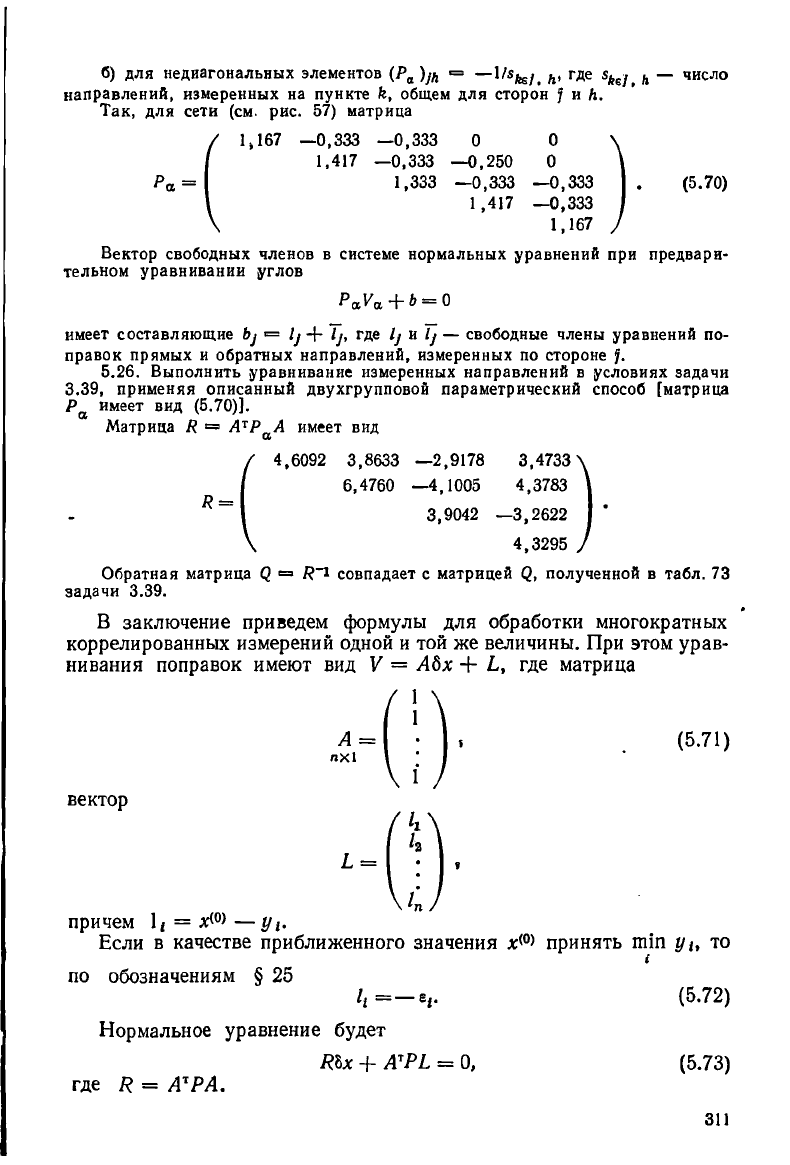
б) для недиагональных элементов (Р
а
)у
Д
•= —1/5^
н
, где в
ке/ н
— число
направлений, измеренных на пункте к, общем для сторон ] и к.
Так, для сети (см. рис. 57) матрица
1,167 —0,333 —0,333 0 0
1,417 —0,333 —0,250 0
1,333 —0,333 —0,333 | . (5.70)
1,417 —0,333
1,167
Вектор свободных членов в системе нормальных уравнений при предвари-
тельном уравнивании углов
Р
а
У
а
+
Ь
= 0
имеет составляющие 6у = /у + /у, где /у и /у — свободные члены уравнений по-
правок прямых и обратных направлений, измеренных по стороне
5.26. Выполнить уравнивание измеренных направлений в условиях задачи
3.39, применяя описанный двухгрупповой параметрический способ [матрица
Р
а
имеет вид (5.70)].
Матрица К = А
т
Р
а
А имеет вид
4,6092 3,8633 —2,9178 3,4733'
6,4760 —4,1005 4,3783
^ 3,9042 —3,2622
4,3295
Обратная матрица Ф = совпадает с матрицей полученной в табл. 73
задачи 3.39.
В заключение приведем формулы для обработки многократных
коррелированных измерений одной и той же величины. При этом урав-
нивания поправок имеют вид V = А8х + Ь, где матрица
(5.71)
вектор
причем 1, = х<
0
>—у
г
.
Если в качестве приближенного значения *
(0)
принять тт то
<
по обозначениям § 25
(5-72)
Нормальное уравнение будет
РЬх + А
Т
РЬ = 0, (5.73)
где Я = А
1
РА.
311.
Учитывая выражение матрицы (5.71), найдем, что Я — 2
Р
, где
через 2
р
обозначена сумма всех элементов матрицы Р. Для вектора
свободных членов Ь = А
Т
РЬ получим, учитывая обозначение (5.72),
выражение
Ь
=
-
2
]рЬ
1=1
где [р] I — сумма элементов /-го столбца матрицы Р.
Решая уравнение (5.73), находим поправку
Ъ
Х
= ШШ. „
2 м
14
х=
,
х
<о>+Ы-
(574)
"р
В частном случае, когда матрица Р диагональная,
- (0) , [ре]
X = X + -
1
- '
[р]
Выражение (5.74) представляет собой обобщенную арифметическую
средину.
Заметим, что если л:
(0
> = 0, то
х =
2 [р]|*1
1=1
Величина 2
Р
есть вес обобщенной арифметической средины. Сред-
ние квадратические ошибки
Г УРУ
^=т
(X
, а т =
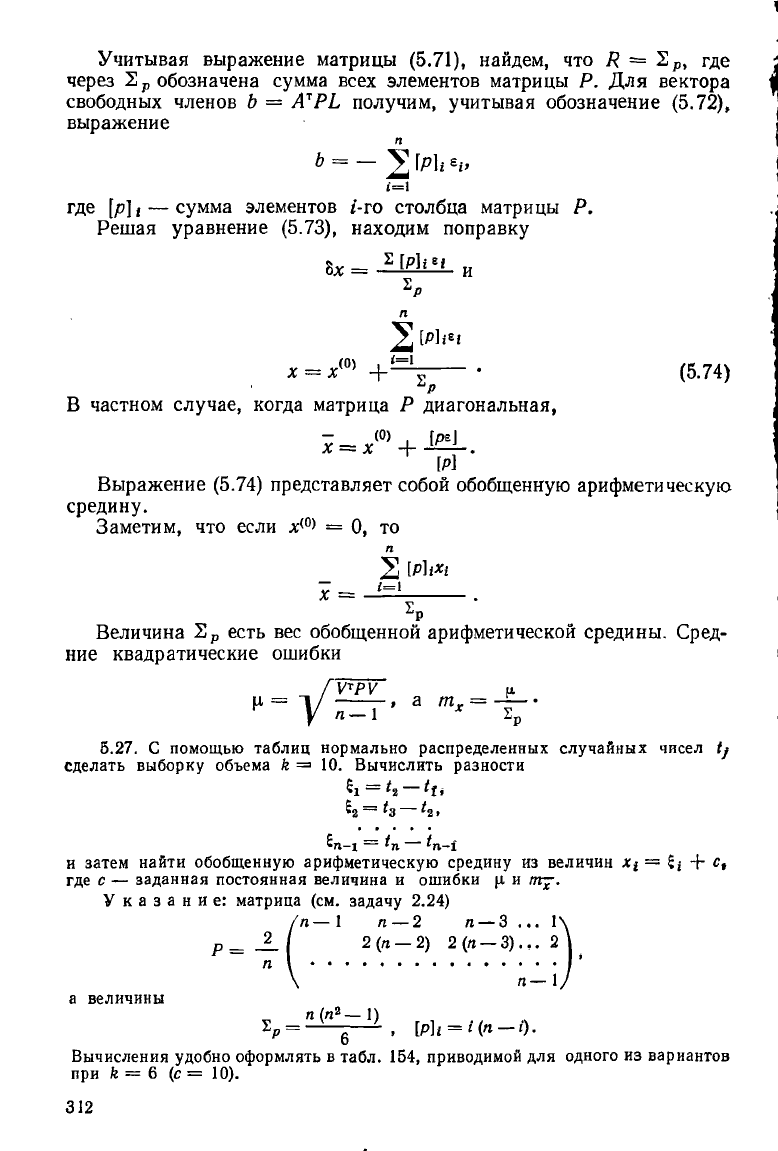
6.27. С помощью таблиц нормально распределенных случайных чисел Iу
сделать выборку объема к = 10. Вычислить разности
=
'з — 'а I
1
=
'п — 'п.-1
и затем найти обобщенную арифметическую средину из величин = + с,
где с — заданная постоянная величина и ошибки ц и пг—.
Указание: матрица (см. задачу 2.24)
/я—
1
л —2 п — 3 ... 1\
р
=
_2_( 2 (л — 2) 2(я —3).,. 2
\ л-1,
а величины
п(я
а
— 1)
6
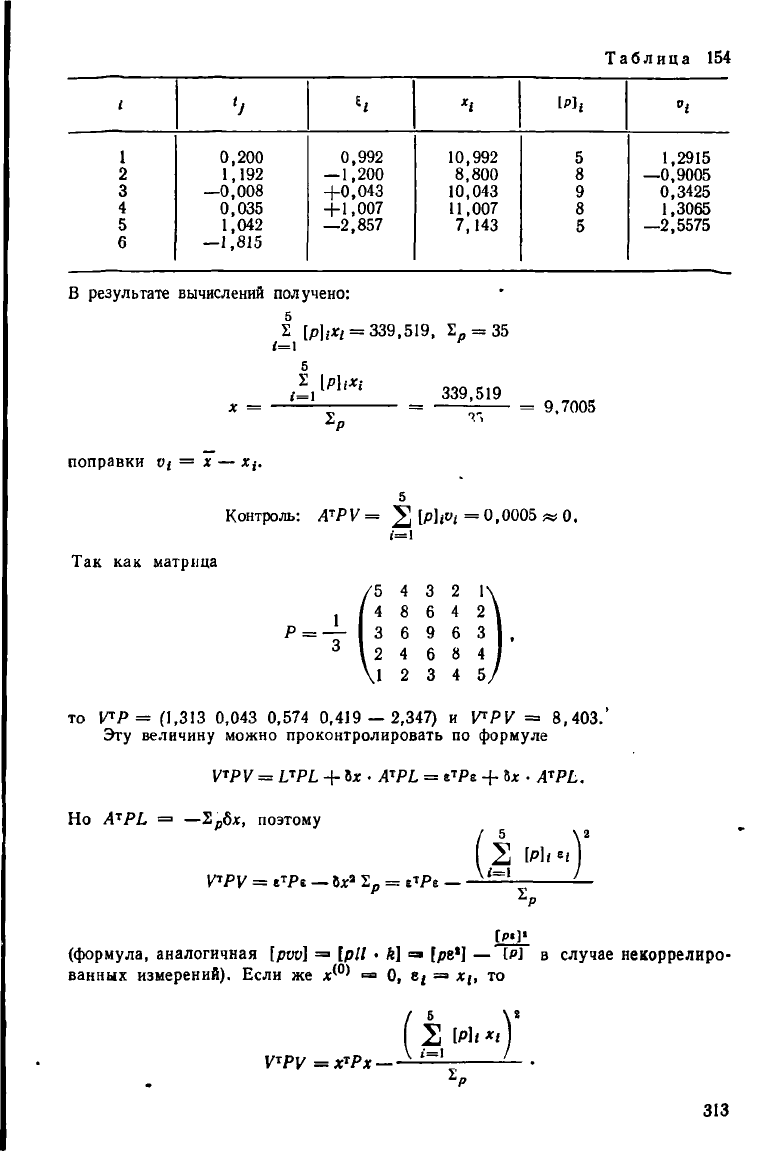
Вычисления удобно оформлять в табл. 154, приводимой для одного из вариантов
при к = 6 (с = 10).
312.
е
,
[Р)1
= /(п-0-
Таблица
118
1
'у
Х
1
1 Р]
г
1 0,200
0,992 10,992
5 1,2915
2
1,192 — 1,200 8,800
8
—0,9005
3
—0,008
+0,043
10,043
9 0,3425
4
0,035
+1,007 11,007
8 1,3065
5
1,042 —2,857
7,143
5
—2,5575
6 —1,815
—2,857
7,143 —2,5575
В результате вычислений получено:
5
X [рЪ*/ = 339,519, Е-= 35
|РЬ
*'" 339,519
* = ; = ^ = 9,7005
поправки VI = х —
5
Контроль: А
Т
РУ = 2 =0,0005 да 0.
1=1
Так как матрица
/5 4 3 21
. / 4 8 6 4 2
Р = — I 3 6 9 6 3
3
I 2 4 6 8 4
\1 2 3 4 5,
то IАЯ= (1,313 0,043 0,574 0,419 — 2,347) и Iпру = 8,403.'
Эту величину можно проконтролировать по формуле
V
х
РУ = иРЬ + В* • А
Т
РЬ = е
т
Ре + 8* • А
Т
РЬ.
Но А
Т
РЬ = —2рбдс, поэтому
УРУ = е
т
Ре — 8х
а
2
р
- е^Ре — ^
5 \ 2
'•=} !_
р
[р«]'
(формула, аналогичная [рт] = [р// • к\ =а [ре*] — О! в случае некоррелиро-
ванных измерений). Если же *
(0)
= 0, е^ = то
(I
утру = X
х
Рх
[РЬ *1 '
313