Білинський, Й.Й. Методи обробки зображень в комп’ютеризованих оптико-електронних системах: монографія
Подождите немного. Документ загружается.

З розкладу в ряд Тейл ня перетворення (2.16) мож-
на ви цес
визначення ко ивних пара-
метрів.
Моделювання залежності координат примежової кривої від не-
інформ
ора з рівнян
вести аналітичні залежності для оцінювання впливу на про
ординат примежової кривої від неінформат
ативних параметрів побудовані в середовищі символьної мате-
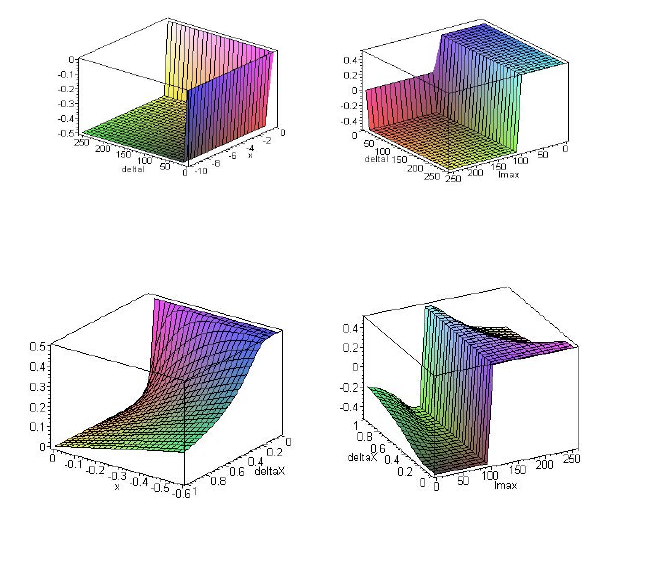
матики Maple 7 у вигляді тривимірних поверхонь наведені на рис.
4.1–4.4 [117, 122]. Результати моделювання показали, що зміна інте-
нсивності в області найбільшого значення похідної примежової кривої
не має на результат вимірювання.
Аналогічна ситуація з впливом максимального та мінімального
примежової кривої
значення інтенсивності
max
I
та . Суттєвий
на результати вимірювання вносить раме
min
I
дискретизаціїв паплив тр
n
Δ
.
к ння об’єкта в
, пов’язані з дискретизацією, то зрозум
похибка бу
отримання високої точності визначення
Оскіль
ілому
За стандартною методикою оцінювання похибок результату
опосередкованого вимірювання відносної похибки визначення моделі
и параметри примежової кривої, як і все зображе
ц іло, що крок дискретиза-
ції повинен вибиратися достатньо малим, щоб ла незнач-
ною. З іншої сторони для
краю необхідно використовувати додаткові алгоритми.
Рис. 4.2. Залежність похибки
перетворення від впливу
I
Δ
і
max
I
Рис. 4
і
.1. Залежність похибки пе-
ретворення від впливу
IΔ
Δ
Рис. 4.3. Залежність похибки
перетворення від впливу
Δ
і
max
I
Рис. 4.4. Залежність похибки
перетворення від впливу
Δ
x і
Δ
max
I
140
примежової кривої, як функції декількох величин згідно з (2.31), по-
хибки яких незалежні, знаходяться згідно з [204
, 205]:
min max
222 2
HI II
δ
δδδ δ
ΔΔ
=+++
,
(4.1)
де
I
δ
Δ
,
δ
Δ
,
min
I
δ
,
max
I
δ
– відносні похибки визначення максимальної
зміни інтенсивності, кроку дискретизації, мінімальної та максимальної
інтенсивностей примежової кривої.
Середнє квадратичне відхилення (СКВ) похибки моделі при-
межової кривої
2
2
22
[] [] [] [ ] [ ]
HHH H
HI I I
σσσ σ
⎛⎞
⎛⎞
∂∂∂ ∂
⎛⎞⎛⎞
=Δ+Δ +
⎜⎟
min max
min max
III
σ
⎜⎟
⎜⎟⎜⎟
∂Δ ∂Δ ∂ ∂
⎝⎠⎝⎠
⎝⎠
⎝⎠
де
,
[]I
σ
Δ
,
[]
σ
Δ
,
min
[]
I
σ
,
max
[]I
σ
– СКВ похибки моделі примежової кри-
вої, кроку, мінімальної та максимальної інтенсивності примежової кри-
вої, відповідно, які визначаються внаслідок багаторазових вимірювань;
H
I
∂
∂Δ
,
H
∂
∂Δ
,
max
H
I
∂
∂
,
min
H
I
∂
∂
, – «вага» кожної
визначаються в результаті диференці -
раметром.
я к ов
частинної похибки, які
ювання (2.16) за відповідним па
Значення СКВ опосередкованого визначенн рай ої точки на
примежовій кривій у результаті проведених обчислень
[ ] 0,0H 18
σ
=
піксела. За значенням нормованої функції
2
/
P)z(Ф
=
для ймовірності
Р
=0,95 значення
p
z =2,0 [204,205]. Тоді границі довірчого інтервалу
становлять
[]
Hp
zH
σ
Δ=± ⋅ =
±2,0·0,018=0,036 піксела.
Результат опосередкованого вимірювання крайової точки на
примеж
4.2. методичних похибок визначення положення
максимуму інтенсивності світлової плями
У загальному випадку процес знаходження максимуму світло-
вої плями
овій кривій
H:
(0,09 ±0,036)пікс; Р =0,95
.
Оцінювання
, що описується аналітичною функцією перетворення (2.35),
яка може бути використана для оцінювання основних статистичних
метрологічних характеристик, подається у вигляді:
141
12
(, ,,,)
n
fII
δ
αβ
=
Δ
,
де
n
δ
– вихідна величина; ,
α
β
– вхідна величина;
1
I
2
,,I Δ
– впливні
.
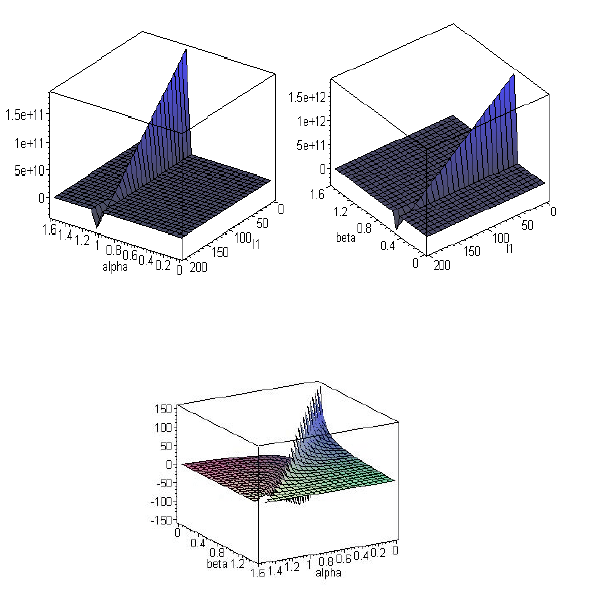
З розкладу в ряд Тейлора рівняння перетворе
аналітичні зал
величини
ння (2.35) можна
вивести ежності для оцінювання впливу на процес пере-
творення зміщення
δ
відносно середини піксела від неінформативних
параметрів. Результати моделювання залежності координат піку світ-
п
онь побудовані в середовищі символьної математики
і показані на рис. 4.5– 4.7 [136].
лової
Maple 7
лями від неінформативних параметрів наведені у вигляді три-
вимірних поверх
Рис. 4.5. Залежність похибки
перетворення від
1
I
і
α
Рис. 4.6. Залежність по
пере ід
1
I
і
хибки
творення в
β
Рис. 4.7. Залежність похибки перетворенн
я
від впливу
коефіцієнтів
α
і
β
142
Теоретичні дослідження вказують на безпосередній зв’язок ко-
,
α
β
ефіцієнтів нахилу функції , за положенням максимуму інтенсив-
ності світлової плями. При збільшенні перепаду інтенсивності в околі
максимуму похибка зростає.
За стандартною методикою оцінювання похибок результату
опосередкованого вимірювання відносна похибка визначення піка
інтенсивності світлової плями як функції декількох величин, похибки
яких незалежні, знаходяться згідно з [204
, 205]:
12
2222
I
I
δαβ
δ
δδ
=++
δδ
+
, (4.2)
де
α
δ
,
β
δ
, – відносні похибки визначення нахилу функції інтенсивно-
сті справа від піксела з максимальною інтенсивністю, відповід-
но
злі
;
1
в таа
I
δ
2
I
δ
, – відносні похибки визначення інтенсивності пікселів зліва
та справа від піксела з максимальною інтенсивністю, відповідно.
ереднє квадратичне відхилення (СКВ) похибки вимірювання
піку світлової плями
С
22
2
2
12
12
[] [] [] [] []II
II
δ
δδδδ
σδ σα σβ σ σ
αβ
⎛⎞⎛
⎛⎞
∂∂∂∂
⎛⎞
=+ +
⎜⎟⎜
⎜⎟
⎜⎟
∂∂∂∂
⎝⎠
⎝⎠
⎝⎠⎝
⎞
⎟
⎠
,
де
[]
σ
α
,
[]
σβ
– СКВ похибки
та справа ві пі се
визн вно-
сті д к ла з макс вн т ;
ачення нахилу функції інтенси
имальною інтенси іс ю зліва
1
[]I
σ
,
2
[]I
σ
– СКВ
максимальною
похибки інтенсивності пікселів зліва та справа від
інтенсивністю, відповідно;
піксела
з
δ
α
∂
∂
,
δ
β
∂
∂
,
1
I
δ
∂
∂
,
2
I
δ
∂
∂
, – «ва-
га» кожної частинної похибки.
цьому СКВ вищенаведених похибок визначаються вна-
слідок агаторазових вимірювань, а вагові коефіцієнти кожної част-
кової похибки – в результаті диференціювання (2.35) за відповідним
араметром.
Значення СКВ опосередкованого вимірювання крайової точки
резу
При
б
п
льтаті проведених обчислень
[ ] 0,0178
σ
δ
=
піксела. За
2
в значен-
ям нормованої функції
Р=0,95 значення н
/
P)z(Ф
=
для ймовірності
143
p
z =2,0 [202,203]. Тоді границі довірчого інтервалу становлять
[]
p
z
σ
σ
δ
Δ=± ⋅ =
±2,0·0,0178=0,0356 піксела. Результат опосередковано-
го вимірювання координати максимуму інтенсивності
δ
δ
:
(0,09 ± 00,0356)пікс;P= ,95
4.3. Аналіз похибок моделювання методу
крайового детектування
У цьому
лізу точності
начення
по
ит об
ричних
координат краю
.
підрозділі
запропонованого
положення
. 4.8.
об’єкта
представлена методологія дослідження
методу крайового детектуван
максимуму інтенсивності світлової .
ео
Цей макет імітує неперервний моніторинг
вимірювання внаслідок зміни його положен
й
а ня та на
из
ня
в плями
мет-
Аналіз хибок методу дає змогу дати
рекомендації й обмеження на
вибір устаткування, що входить до складу вимірювальної системи;
вияв и ласті
застосування вимірювального пристрою (методу).
Для
експериментальної оцінки похибки вимірювання г
параметрів об’єктів створено макет імітаційної КОЕС, схема
якого наведена на рис
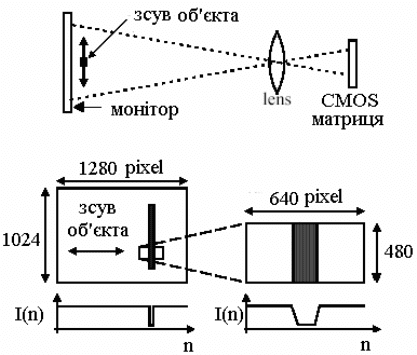
Рис. 4.8. Схема експериментальн ітаційної КОЕС
ого макета ім
144
Макет КОЕС складається з з цифровим виходом,
ість 640×480 пікселів з міжпікселною шириною 8 мкм.
Відеокамера з низькою роздільно здатністю вибиралася спеціально
з метою отримання більшої відмінності в результатах вимірювання
відеокамери
яка має розмірн
ю
без застосування та з застосуванням запропонованого методу крайово-
го детектування.
Зображ дюймового
монітора розмірністю тування інформації з
монітора та подальшої обробки даних відеокамера під’єднувалася до
персон
повторно зчитувалося зображення об’єкта.
араметри інтенсивності об’єкта та його положення задавалися
програмно. Таким чином, координати положення краю об’єкта були
відомими завдяки розмірам піксела монітора. При цьому для збере-
ження однакової інтенсивності край об’єкта був паралельний стовп-
цям матриці [141].
До проведення вимірювань виконувалося калібрування оптич-
ної системи, у процесі якої визначалися габаритні параметри схеми.
Шляхом вимірювання метрологічного об'єкта спеціального виду, на
який наносились добре помітні реперні точки, знаходилася область
простору в результаті прив’язки відеокамери до монітора, в якій опти-
чна система може вважатися ізопланатичною.
Після проведення калібрування протягом усієї процедури кон-
тролю параметри оптичної системи не змінювалися. Відстань між мо-
ніт к-
ел
ення об’єкта формувалося на екрані 19-ти
1280×1024 піксела. Для зчи
ального комп’ютера за допомогою стандартного інтерфейсу
USB.
Суть проведених експериментів полягає у знаходженні коор-
динати крайової точки об’єкта, що знаходиться на моніторі шляхом
його реєстрації відеокамерою. При цьому положення відеокамери
протягом усієї процедури відеознімання фіксоване.
Зображення об’єкта з екрана монітора записувалося на цифро-
ву відеокамеру з наступним введенням у комп’ютер, де формувався
профіль примежової кривої краю об’єкта. При цьому програмним
шляхом виконувався зсув об’єкта на один піксел по горизонтальній
осі та
П
ором і відеокамерою вибиралася таким чином, що відношення пі
а монітора до піксела відеокамери складало 4:1. с
145
Багатократне зміщення на один піксел зображення об’єкта на
моніторі фіксувалося за допомогою відеокамери та визначався край
одного й того ж рядка фотоматриці. З цією метою була розроблена
програма визначення крайової точки з субпікселною точністю.
Програмне забезпечення дало змогу отримати координати
крайової точки відомими методами, а також запропонованим методом
на осно
роксимації та на основі експериментально отриманих даних
побудо
використання за-
пропон
ві низькочастотної фільтрації.
Оскільки залежність між пікселами монітора та відеокамери
майже лінійна, то для уточнення параметрів залежності, використо-
вуючи метод найменших квадратів, були визначені коефіцієнти ліній-
ної ап
вана уточнена лінійна функція [206, 207].
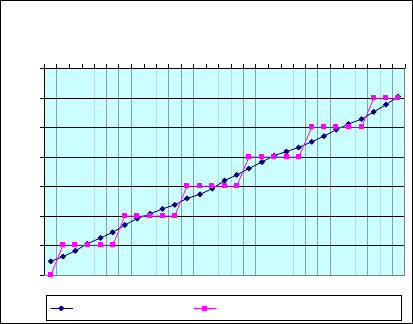
Результати багатократного зсуву з визначеним положенням
краю зображення об’єкта, що формувалося відеокамерою внаслідок
його бінаризації, та уточнене положення внаслідок
ованого методу в системі координат M, N наведені на рис. 4.9,
де
M – номер піксела монітора та N – номер піксела відеокамери.
0
1
2
3
4
5
6
7
23252729
N
1 3 5 7 9 111315171921
M
дані відеокамери низькочастотна фільтрація
Рис.
ла відеокамери не
4.9. Положення краю об’єкта в результаті зсуву, зафіксоване
відеокамерою та розраховане
Графік наочно демонструє, що при зсуві зображення на моні-
торі положення краю об’єкта в рамках одного піксе
146
змінює
омими
метода
отримано більше ніж 100 зобра-
жень о
ться, а локалізована координата запропонованим методом має
субпікселне зміщення.
Для підтвердження достовірності роботи методу на основі низь-
кочастотної фільтрації результати порівнювалися з найбільш від
ми шляхом знаходження середньоквадратичної похибки вимі-
рювання, яка визначалася за допомогою координат, отриманої апрок-
симованої прямої. З цією метою було
б’єкта та проаналізовані крайові точки декількох рядків матриці.
Оскільки усі алгоритми знаходження крайової точки були пос-
тавлені в рівні умови, то за методикою оцінки випадкових похибок
опосередкованих вимірювань було оцінено СКВ результатів вимірю-
вання, які наведені в таблиці 4.1.
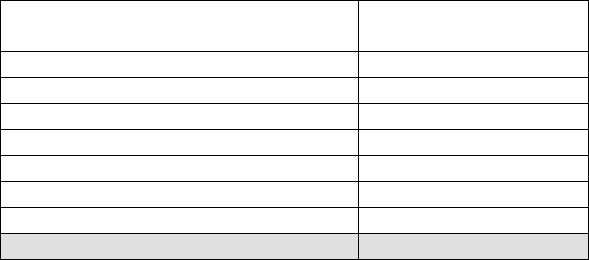
Таблиця 4.1
Порівняльний аналіз результатів крайового детектування
при використанні різних типів детекторів
Метод Середня квадратична по-
хибка
Без субпікселного уточнення 0,28
Апроксимації Гаусса 0, 0223
Лінійна інтерполяція 0,21
Параболічна оцінка 0,042
Фотометрична інтерполяція 0,12
Перетин нульового рівня 0,028
Градієнтний 0,03
Низькочастотна фільтрація 0,017
Відоме відношення розміру піксела монітора до піксела відео-
камери дало можливість встановити величину зсуву зображення, яке
в цьому випадку становило приблизно 0,25 піксела. При цьому вста-
новлено, що головним джерелом цієї похибки є випадкові похибки,
які пов’язані з пікселною неоднорідною чутливістю, а також дисторсі-
єю
акону, використовуючи в [202, 206], була
отрима
оптичної схеми.
Враховуючи, що розподілу похибки відповідає нормальному
відому методику, наведенуз
на максимальна методична похибка визначення положення
крайової точки, яка не перевищує 10 % міжпікселної ширини.
147
Результати досліджень свідчать про високу точність роботи
детектора на основі низькочастотної фільтрації в порівнянні з відоми-
ми, в т
аного незашумленого зображення
були відомими, а координати краю зашумленого зобра
значали
Після сього зобра-
ження для кожног та стовпця матриці,
крива визначалися параметри гауссоїди, тобто ступінь розмиття, розмір-
ність ф ієнти, за якими синтезувалися од-
нонаправле ьні та вертикальні з орієн-
тації краю ка була розглянута в розділі 3. Таким
чином, виз крайової точки для зашумлених зобра-
жень з и координати краю відомими,
то обчи КВ. Результати досліджень завадос-
тійкості детекто детектування наведені в таблиці 4.2.
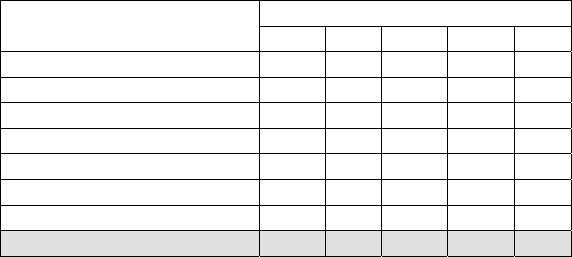
блиця 4.2
ому числі з детектором «перетину нульового рівня».
Для оцінки впливу шуму на роботу детектора проведені дослі-
дження на синтезованих зашумлених зображеннях. Таке зображення з
шумом, край якого збігається з орієнтацією ґратки матричного прий-
мача, отримане в результаті фільтрації, наведене на рис. 4.10а і б.,
фрагменти осцилограм виділеного рядка – на рис. 4.10 в, г і д.
Параметри шуму для одного й того ж рівня зашумленості змі-
нювалися за допомогою випадкової вибірки й процес вимірювання
повторювався [132, 133].
Координати краю синтезов
ження ви-
ся запропонованим методом для кожного рядка матриці.
приглушення шуму в результаті фільтрації в
о рядка де знаходилась примежова
ільтра та його вагові коефіц
ні фільтри горизонтал алежно від
згідно з методикою, я
началися координати
різним рівнем шуму. Оскільк були
слювалися їхні значення С
рів крайового
Та
Завадостійкість детекторів крайового детектування
Метод Рівень зашумленості
10 % 20 % 30 % 40 % 50 %
Без субпікселного уточнення 0,34 0,36 0,365 0,382 0,39
Апроксимація Гаусса 0,028 0,029 0,033 0,036 0,041
Лінійна інтерполяція 0,09 0,1 0,123 0,131 0,15
Параболічна оцінка 0,032 0,033 0,035 0,04 0,044
Фотометрична інтерполяція 0,07 0,081 0,092 0,12 0,13
Перетин нульового рівня 0,01 0,012 0,0145 0,0161 0,018
Градієнтний 0,027 0,029 0,031 0,034 0,036
Низькочастотна фільтрація 0,008 0,009 0,01 0,012 0,018
148
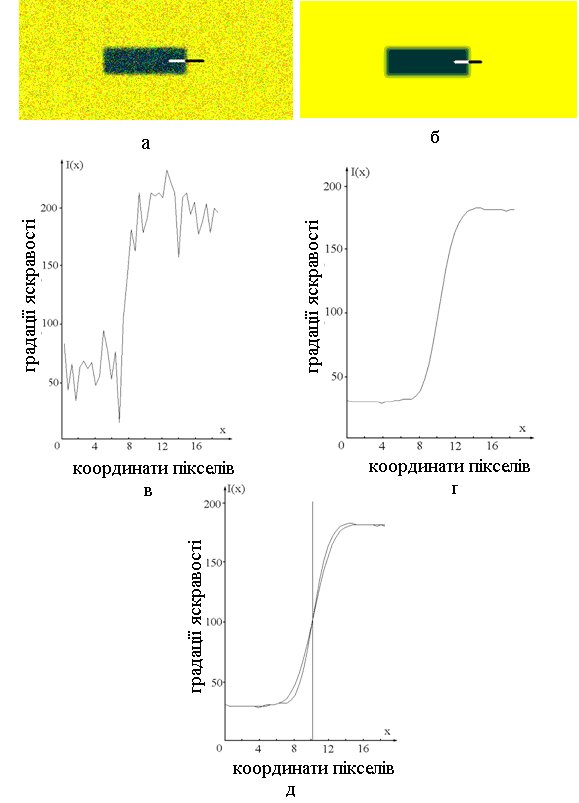
Рис. 4.10. Синтезов
а – розмите та з 1
ане з ен я о к
н ен шумом;
ф ов
ен ил о а
в – ображен ф в зо нн
пр ни аж ть у
ображ ня пр
им гау
мокутн го об’є та:
00 %
б –
аклад ссовим
ільтр ане.
На графіках – фрагм ти осц ограм виділен го рядк :
зашумленого з ня; г – ільтро аного браже я; д –
имежових кривих фільтрова х зобр ень, що маю спільн точку
149