Благовещенский С.Н., Холодилин А.Н. Справочник по статике и динамике корабля. Статика корабля. Том 1
Подождите немного. Документ загружается.

где
то
=
(7
1
МИдо
+-£-•-£-—г)
о
—a
o
V
o
j
(5.90)
«o-*i,-*c
o
. (5.91)
Далее
ч
i
tg
«fj = j ;
(5.92)
Ш
j _—;
(5.93)
(5.94)
tg 6,
= —
v
± .
(5.95)
-IT
T
Третий параметр исходной ватерлинии
4^
1
L
1
определяют
по
формуле
>
-^-*f.
t
8*i.
(5.96)
где "ф
ж
—. окончательное значение параметра t|>, вычисленное
по
формулам (5.88)—
(о.Уо).
Ватерлинию W
X
L
X
наносят
на
чертеж теоретического корпуса судна
с
построен-
ными
на нем
интегральными кривыми.
С
помощью этих кривых находят водоизмещение
V
x
по исходную ватерлинию,
координаты
ЦВ Х
и
Y
u
Z, и
элементы площади проекции ватерлинии
W^ на
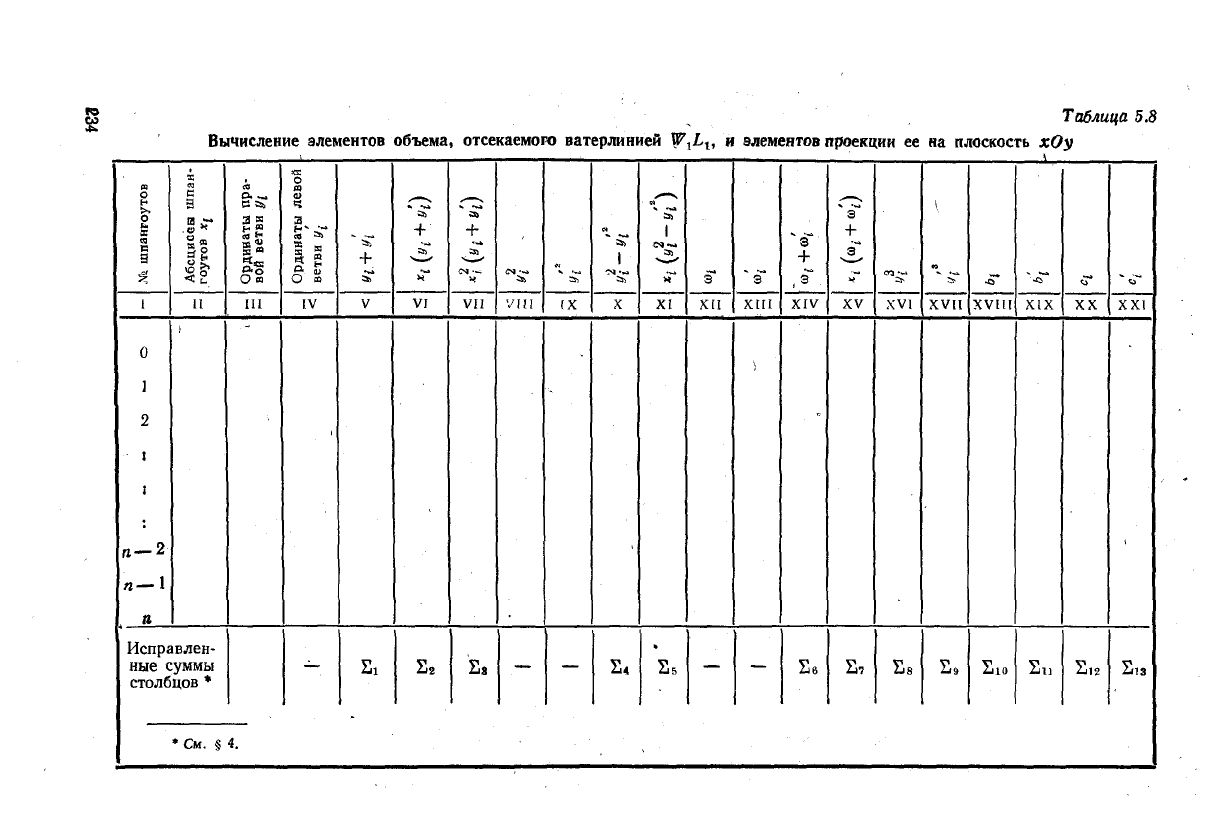
основную плоскость. Элементы судна по ватерлинию
W^
вычисляют
*
по табл.
5.8.
Далее вычисляют следующие величины?
eo
t
= V
o
+ v -
V
t
;- (5.97)
»т
=
X
o
V
o
+xv
~
Х
1^1 -
x
h
6v
v
(
5
-
98
>
V-x*
х
=
К
о^ +vy-Y
l
V
l
- щ^,
(5.99)
»xyl
=Z
o^o +
••«
~ h
V
i ~ *h
6v
v
<
5
-
100
>
«fi-^-Mi + ^te^ + ^ne
6
!;
(
5Л01
>
Di=
V1 tg *i tg 6
X
+ /
w
j (1 + tg*
6,);
(5.102)
(5.103)
(5.104)
"*
(5.105)
(5.106)
(5.107)
*
См. также
§ 17.
233
s
Таблица 5.8
Вычисление элементов объема, отсекаемого ватерлинией
W
t
L
u
и элементов проекции ее на плоскость хОу
са
о
н
£
Ж
s
0
1
2
я-2
л—1
га
е
3
.о
*
§
я
П
Исправлен-
ные суммы
столбцов
*
'См.
§
Ординаты
пра-
вой
ветви
г/;
III
4.
Ординаты левой
ветви
у^
IV
•
—
V
VI
и
VII
и
VIII
—
(X
—
1
X
1
XI
э
XII
—
3
XIII
—
,
3
xiv
"з"
XV
S,
XVI
Е
8
i
XVII
-О
XVIII
ь
.
XIX
Ец
XX
2,
2
XXI
2,з
По
полученным величинам составляют уравнения
D
1
_^_
+
£
I
_*|«
=f
i;
(5.108)
1
cos
2
г]),
cos
2
6,
68
2
г
ri
-
(5Л09)
- Решая уравнения
(5.108)—(5.109)
относительно
S^Jcos
2
ф
х
и 6e
a
/cos
2
е
ъ
на-
ходят
поправки к параметрам исходной ватерлинии; параметры ватерлинии W
2
L
%
второго приближения определяют формулами
1
^ (5.ш>
Третий параметр вычисляют по формулам
(5.112)
- <
5Л13
>
Если поправки бг|)
2
, 69
2
, 6T
MHfl 2
достаточно малы и при переходе от ватерли-
нии
^iZ-i к ватерлинии 1F
2
L
2
обводы судна не претерпевают резких изменений,
на
полученном приближении можно остановиться. В противном
случае
следует
приступить к третьему приближению, приняв ватерлинию
W
2
L
2
за исходную, на-
неся
ее на чертеж корпуса и повторив весь процесс вычислений.
, В заключение приводится табл. 5.8 и относящиеся к ней формулы (5.114)—
(5.126), по которым по правилу трапеций вычисляют элементы судна по произвольно
заданным параметрам
Г
мид
,
в, -ф.
Водоизмещение
(5.114)
Момент водоизмещения относительно плоскости мидель-шпангоута
t
V
v
(5.115)
Момент водоизмещения относительно диаметральной плоскости
Щг - 4 [
2l
° - 2u - ^ «
в
(2. + St)} =
YiV»
(5.116)
Момент водоизмещения относительно основной плоскости
Su-tge,
=
2
1
V
1
.
(5.117)
Площадь проекции ватерлинии на плоскость хОд
235
Статический момент этой площади относительно оси Од
S*
f
=
A
2s
.
(5.119)
(5-120)
Статический момент этой площади относительно оси Ох
Момент инерции этой площади относительно оси Ох
Ы
=
~у
(Е8 + 2
°
)
-
(5.121)
Момент инерции этой площади относительно оси Од
1у
= ±Ъ,.
(5.122)
Центробежный момент инерции этой площади относительно осей Ох
и
Оу
/
^
==
T'T
S5
'
'
(5123)
Момент инерции той же площади относительно оси, проходящей через ее центр
тяжести
и
параллельной оси Оу
/„,-/;_S,;|l.
(5.124)
Момент инерции той же площади относительно оси, проходящей через ее центр
тяжести
и
параллельной оси Ох
h=l'
x
-jSy
f
^..
,'
(6.125)
Центробежный момент этой площади относительно указанных центральных
осей
lxu
= l'xy-\s
Xf
^.
(5.126)
Случай
2.
Затопление большого отсека, сообщающегося
с
забортной водой
и
открытого
сверху.
Как-и
в
первом
случае,
сначала ищут параметры исходной ва-
терлинии,
пользуясь формулами для прямостенного
судна
и
отсека.
*
Площадь, сечения отсека первоначальной ватерлинией обозначена' s
0
, координаты
ее центра тяжести Я.
о
и q
0
, собственные центральные моменты инерции ее относительно
осей,
параллельных координатным — /
х>
, j^,
j
xyo
-
Площадь действующей первоначальной ватерлинии
So
=
S
n
— s,,.
(5.127)
Статический момент площади S'
o
относительно оси
бд
S'
o
a
=
S
Q
x
f0
— s
0
^.
(5.128)
* Взамен формул
(5.127)—(5.148)
для определения параметров исходной ватер-
линии
могут
быть применены метацентрическйе формулы § 61, 62.
236
Статический момент площади
S'
o
относительно оси Ох
в;р--ЭДо-
(5-129)
Момент инерции площади SQ относительно центральной
оси,
параллельной
Оу,
I'uU
= hh - h, -
*fo>
-
OL
2
S'
O
.
(5-130)
Момент инерции площади
SQ
относительно центральной
оси,
параллельной
оси
Ох.
.
l'x,
= h. -ho-wl-?>
2
S'»-
(5-131)
В целях получения менее громоздких формул вводят новую систему коорди-
нат
f'x'y'z',
начало которой
/'
совпадает
с
центром тяжести площади действующей
ватерлинии
S'
o
. Ось /V
направлена
по
нормали
к
ватерлинии,
а
оси
f'x'
и
f'y'
совпа-
дают
с
главными осями инерции площади
S^.
Центробежный момент инерции площади
S'
o
относительно осей
Ох
и
Оу
l'xv.="
— Uv.—
Wo
— «Р$о-
(5.132)
В целях получения менее громоздких расчетных формул рассматривается
на-
клонение
вокруг главных центральных осей инерции площади действующей ватер-
линии.
Угол,
составляемый главной продольной осью инерции
f'x'
площади
SQ С ОСЬЮ
О*
е=
, '*»' , .
(5.133)
Главный момент инерции площади SQ относительно этой
оси
l"rx'
= l'x
o
-e
2
(lyU-l'x,).
(Э.134)
Главный центральный момент инерции площади
SQ
относительно поперечной
оси
f'y' -
If'y'
= Hh + е
2
Huh
-
I'x,)-
(5.135)
Координаты XQ И J/Q центра тяжести объема
о
относительно координатных
пло-
скостей z'f'y'
и
z'f'x'
•
;
.
(5.136)
Р);
(5.137)
-аоК
0
.
(5.138)
Расчетные формулы, дающие
с
последовательно возрастающей точностью
зна-
чения
искомых параметров,
"
оХ
1
,; " '
(5.139)
о
t
g
9
1
=
и
°
Уо
,; .
(5.140)
Ifx'+mo
237
//'*'
+ т +
4- I'fx'
tg
2
e'i
+
T
i'
V
y
i-
tg.^2
;
(5.143)
J
2
62
•4-/;^tg
2
e2+4-
/
/4'
Параметры
if" и 6"
определяют наклонение судна вокруг главных осей инерции
площади действующей ватерлинии.
Для
перехода
к
принятой ранее системе коор-
динат
служат
формулы
=
tg-ф"
— е tg
G",
(5.145)
g
1
gt+g
(5.146)
Третий параметр исходной ватерлинии находят
по
формуле
^мид 1
=
Т'мидо
"f"
"^мид 1>
(5.147)
где
6Г
МИД
х
=
-^-
_ a
tg
^
— р tg
в
х
.
(5.148)
По
найденным параметрам наносят
на
чертеже корпуса ватерлинию W
t
L
t
и
по
схеме табл.
5.8
рассчитывают элементы погруженного объема
и
проекции
на
основную плоскость площади ватерлинии. Кроме того, находят значения
Sj
площади проекции свободной поверхности
в
затопленном отсеке, координаты
ее
центра тяжести
A,j
и
q
±
,
моменты инерции
ее
площади
}
х
,
j
yi
,
j
Xiyi
,
затопленный
объем
ч
х
по
исходную ватерлинию W
X
L
X
и
координаты
его
центра тяжести
х
и
г
х
и
y
lt
считая,
что
координатные плоскости совпадают
с
основной плоскостью, плос-
костью миделя
и
диаметральной.
Далее находят адементы площади проекции действующей ватерлинии
S{=S
1
—s
1
;
(5.149)
s
iai=*/i
s
i-
s
iV,
(5-150)
'
-
(5-151)
(5.152)
'i
s
i
=/
4i-^i-MA-Wl.
(8.154)
где
Г
х1
, Г
у1
,
Г
ху1
представляют моменты инерции площади
S
1
относительно
сле-
дов пересечения
ее
координатными плоскостями
хдг и уОг.
После этого вычисляют
вспомогательные величины
6v
1
=V
0
+v
1
— V
1
;
(5.155)
Kzi = ^о^о + v
1
x
1
—X
l
V
1
—a
l
Sv
l
.
(5.156)
Y
i
v
i-?>M;
(5.157)
238
(5.158)
^i
=
r
MH
a
i
+ «itg^i +
Ptge
;
(5.159)
Di
=
/
p/
itgt
1
t
g
ei
+
/;
!/1
(i
+
tg
2
e
1
);
(5.i60)
i
= Ixl 0 + ^
6
l) + 4 ,« *l «
9
1
-V-'xy
1".
<
5
-
161
)
f
i
^ ^e
(5.162)
n«
1
;
(5.163)
(5.164)
(5.165)
Уравнения
для
определения
поправок
бф
2
и 66
2
имеют
вид
D
\
6
f +
Е
\ -%- - F|; [5.166)
1
cos
2
^! '
cos
2
6j
4
1<
(
^
Решая
уравнения (5.166)
и
(5.167) относительно Sip^/cos
2
г^ и
SOa/cos
2
9^ вы-
числяют уточненные значения параметров
(5.169)
(5.170)
(5.171)
где
^^^
(5Л72,
Нахождение,
в
случае надобности, ватерлинии третьего приближения можно
выполнить
тем же
путем, приняв ватерлинию H7
a
L
2
за
исходную. Обычно, однако,
поправки
бгр
2
,
60
2
,
6Т
мИ
д 2 получаются малыми
и
надобности
в
расчете третьего
приближения
не
возникает.
§ 68. УТОЧНЕННЫЙ РАСЧЕТ НЕПОТОПЛЯЕМОСТИ СУДНА
ПО СПОСОБУ А. Н КРЫЛОВА*
Задача уточненного расчета непотопляемости
по
способу акад.
А. Н.
Крылова
состоит
в
определении положения равновесия судна, имеющего пробоину,
и про-
верке
его
остойчивости.
Обработка излагаемого способа
А. Н.
Крылова была произведена
С. Н. Бла-
говещенским. Формулы (5.191), (5.193), (5.194), (5.195) предложены
С. Н.
Благо-
вещенским.
239
. За координатные плоскости, неразрывно связанные ссудном, приняты диа-
метральная плоскость, плоскость грузовой ватерлинии при прямом положении
судна, не имеющего повреждений (накрашенная грузовая), плоскость мидель-шпан-
гоута.
Эти плоскости соответственно обозначены хОг, хОу, уОг.
Начало координат лежит в точке пересечения
всех
трех
плоскостей, положи-
тельная ось Ох направлена в нос, положительная ось Оу — к правому
борту,
положительная ось Ог — вниз.
Соответственно этим осям приняты неизменные в пространстве оси Qi, Qtj,
О£ координат такие, которые при прямом положении равновесия и покое неповреж-
денного судна совпадают соответственно с осями Ох, Оу, Ог. Плоскость |Йт], сле-
довательно,
всегда
совпадает с плоскостью действующей ватерлинии, а ось Q&
направлена вертикально вниз.
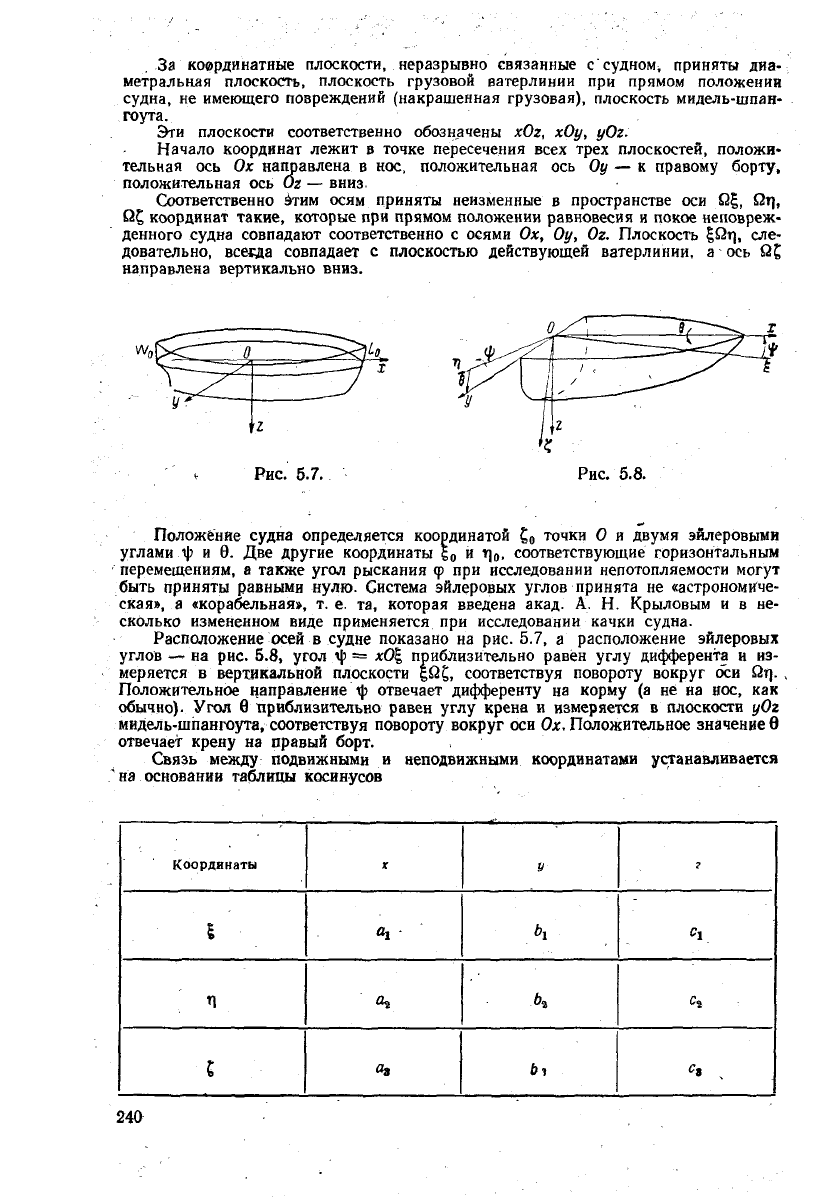
Рис.
5.7.
Рис.
5.8.
Положение судна определяется координатой £
0
точки О и двумя эйлеровыми
углами г|> и 9. Две
другие
координаты |
0
и т|
0
, соответствующие горизонтальным
перемещениям,
а также
угол
рыскания q> при исследовании непотопляемости
могут
быть приняты равными нулю. Система эйлеровых
углов
принята не «астрономиче-
ская», а «корабельная», т. е. та, которая введена акад. А. Н. Крыловым и в не-
сколько измененном виде применяется при исследовании качки судна.
Расположение осей в
судне
показано на рис. 5.7, а расположение эйлеровых
углов
— на рис. 5.8,
угол
tp = хО\ приблизительно равен
углу
дифферента и из-
меряется в вертикальной плоскости |Q£, соответствуя повороту вокруг оси Qrj.
ч
Положительное направление ф отвечает дифференту на корму (а не на нос, как
обычно).
Угол
8 приблизительно равен
углу
крена и измеряется в плоскости уОг
мидель-шпангоута, соответствуя повороту вокруг оси Оле. Положительное значение в
отвечает крену на правый борт.
Связь
между
подвижными и неподвижными координатами устанавливается
4
на основании таблицы косинусов
Координаты
6
С
а,
<h
У
А
г
с
* .
240
Все девять косинусов выражаются через эйлеровы урлы следующими фор-
мулами!
cos (х,
|) =
%
=
cos $;
cos (JC, ц)
=
а
2
=
0;
cos(x,
;)=а
3
=
— statfc
cos (у. l)=6i
=
sin* sin
6;
cos (у, л)
=
b*
=
cos 9;
(5.173)
cos (y, 0=b,== cos
yp
sin
6;
cos (г, £) —
q
±= sin
t
cos в;
cos (г, т))
=
c
a
=
— sin
9;
cos (z, ;)
=
c
3
=
cos
if
cos 9.
Формулы перехода от подвижных координат
к
неподвижным
и
наоборот
(5.174)
У
=
*ii
+
ftj^n
+
6
3
£;
г
=
cjl 4- с
2
т)
+
с
3
(S — Со)
(5.175)
Эти
геометрические формулы являются основными при расчете непотопляемости
судна по.способу
А.
Н. Крылова.
Все затопленные водой отделения поврежденного судна
могут
быть разбиты
на
два класса.
К
первому классу относятся отделения, заполняющиеся
доверху,
количество
воды
в
которых остается постоянным при изменении посадки судна.
Суммарный объем таких отделений обозначен~v
lt
а
координаты центра тяжести
этого объема
х
г
, у\, г
х
,
так что
(5.176)
груз.
Вливающаяся
в
эти отделения вода рассматривается как принятый твердый
Весовое водоизмещение судна
с
заполненными отсеками первой категории
D-Y(V
0
+»i).
(5Л77)
Координаты
центра тяжести судна
(5 Л 78)
где И
о
,
Xg
0
,
Zg
0
— водоизмещение
и
координаты центра тяжести неповрежден-
ного судна.
241
Необходимо помнить,
что
координаты
Zg
Q
, г
г
и Zg
центров тяжести измеряются
не
от
основной,
как
обычно,
а от
плоскости ватерлинии
в
прямом положении непов-
режденного судна, причем значения
их
положительны, если
они
расположены ниже
этой ватерлинии.
Отсеки второго вида имеют свободную поверхность,
и
количество влившейся
в
них при
повреждении воды зависит
от
положения судна.
Суммарный объем
о
2
этих отсеков, расположенный ниже первоначальной
гру-
зовой ватерлинии,
и
координаты
его
центра тяжести определяются аналогичными
формулами
(6.179)
Величины подводного объема судна, расположенного ниже первоначальной
грузовой,
и
координаты
его
центра величины
Хс=-
—"2*2
"(5.180)
.
* 0 Сп ~~
^2**2
•7
__ О 2_
V
n
— v
2
Очевидно,
что
поврежденное судно
не будет в
прямом положении равновесия,
при
котором
So
= 0;
1|э
= 0; 6 = 0,
а погрузится
по
некоторую новую ватерлинию
и
примет такое положение, опреде-
ляемое значениями
5. 'ф, 6, при
которых войдет
в
воду
добавочный объем
U,
обес-
печивающий соблюдение следующих
двух
условий равновесия судна!
вес судна должен быть равен силе поддержания
V
(Уо
или
U
=
y (V
o
-v
2
+
К
+
v
J
= 0;
(5.181)
(I)
центр тяжести
и
центр величины судна должны лежать
на
одной вертикали
£
c
-Sg=O;
(II)
%-т)я=О.
(III)
Для определения точного значения величин £, i|), 9 необходимо сначала найти,
хотя бы грубое, исходное приближение, а затем искать к нему последовательные
поправки,
которые
с
каждым приближением
будут
становиться
все
меньше
и
меньше.
Для определения весьма
грубого
исходного приближения
А. Н.
Крылов
ре-
комендует следующие формулы:
4 -
Z
'c
(
V
0
e
°
(5.182)
где
S —
площадь исходной грузовой ватерлинии,
Xf —
абсцисса
ЦТ
площади
ис-
ходной ватерлинии,
1
0д
—
момент инерции площади исходной ватерлинии относи-
242