Bichop R.H. (Ed.) Mechatronic Systems, Sensors, and Actuators: Fundamentals and Modeling
Подождите немного. Документ загружается.

19-8 Mechatronic Systems, Sensors, and Actuators
on the thermostat, the output remains off. Once room temperature has increased to the setpoint plus
half the deadband, then the cooling system output goes to fully on. As the room cools, the output stays
fully on until the temperature reaches the setpoint minus half the deadband. At this point the cooling
system output goes fully off.
19.14 System Response
Sensors and actuators respond to inputs that change with time. Any system that changes with time is
considered a dynamic system. Understanding the response of dynamic systems to different types of inputs
is important in mechatronic system design. The most important concept in system response is stability.
The term stability has many different definitions and uses, but the most common definition is related
to equilibrium. A system in equilibrium will remain in the same state in the absence of external distur-
bances. A stable system will return to an equilibrium state if a “small” disturbance moves the system
away from the initial state. An unstable system will not return to an equilibrium position, and frequently
will move “far” from the initial state.
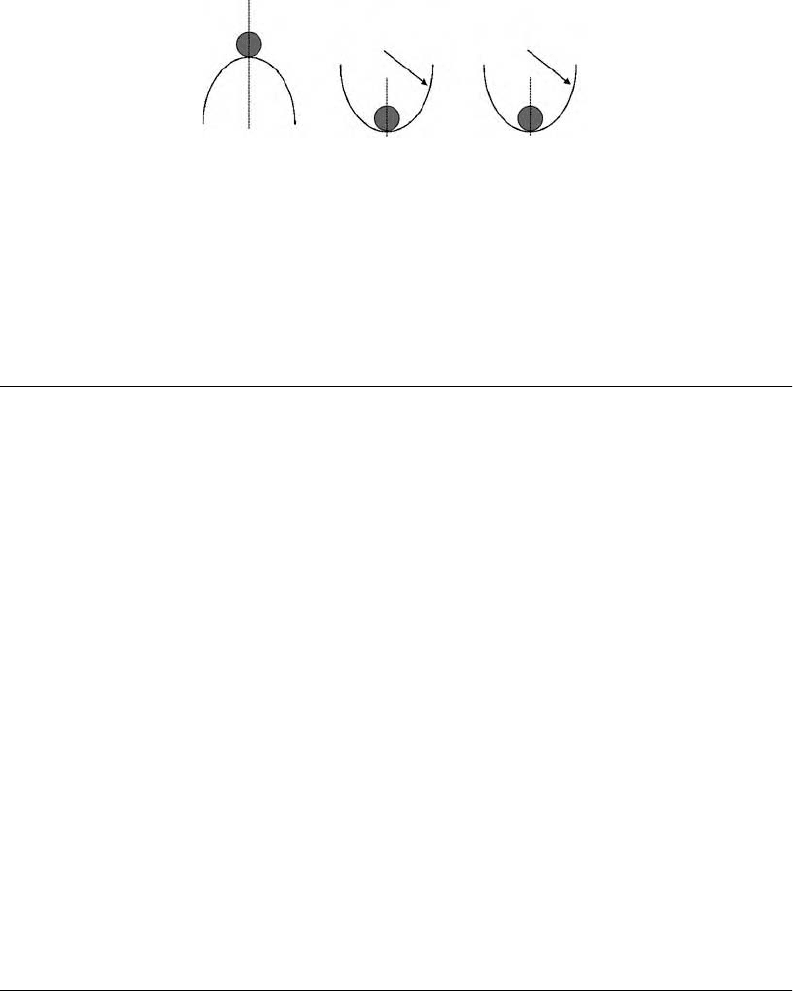
Figure 19.12 illustrates three stability conditions with a simple ball and hill system. In each case an
equilibrium position is easily identified—either the top of the hill or the bottom of the valley. In the
unstable case, a small motion of the ball away from the equilibrium position will cause the ball to move
“far” away, as it rolls down the hill. In the stable case, a small movement of the ball away from the equi-
librium position will eventually result in the ball returning, perhaps after a few oscillations. In the third
case, the absence of friction causes the ball to oscillate continuously about the equilibrium position once
a small movement has occurred. This special case is often known as marginal stability, since the system
never quite returns to the equilibrium position.
Most sensors and actuators are inherently stable. However, the addition of active control systems can
cause a system of stable devices to exhibit overall unstable behavior. Careful analysis and testing is required
to ensure that a mechatronic system acts in a stable manner. The complex response of stable dynamic
systems is frequently approximated by much simpler systems. Understanding both first-order and second-
order system responses to either instantaneous (or step) changes in inputs or sinusoidal inputs will suffice
for most situations.
19.15 First-Order System Response
First-order systems contain two primary elements: an energy storing element and an element which
dissipates (or removes) energy. Typical first-order systems include resistor–capacitor filters and resistor–
inductor networks (e.g., a coil of a stepper motor). Thermocouples and thermistors also form first-order
systems, due to thermal capacitance and resistance. The differential equation describing the time response
of a generic first-order system is
FIGURE 19.12 System stability.
Smooth, no frictionRough, with friction
Marginally stableStableUnstable
dy t()
dt
------------
1
τ
--
yt()+ ft()=
9258_C019.fm Page 8 Tuesday, October 2, 2007 1:24 AM
Sensor and Actuator Characteristics 19-9
where y(t) is the dependent output variable (velocity, acceleration, temperature, voltage, etc.), t is the
independent input variable (time),
τ
is the time constant (units of seconds), and f(t) is the forcing
function (or system input).
The solution to this equation for a step or constant input is given by
where y
∞
is the limiting or final (steady-state) value, y
0
is the initial value of the independent variable at
t = 0.
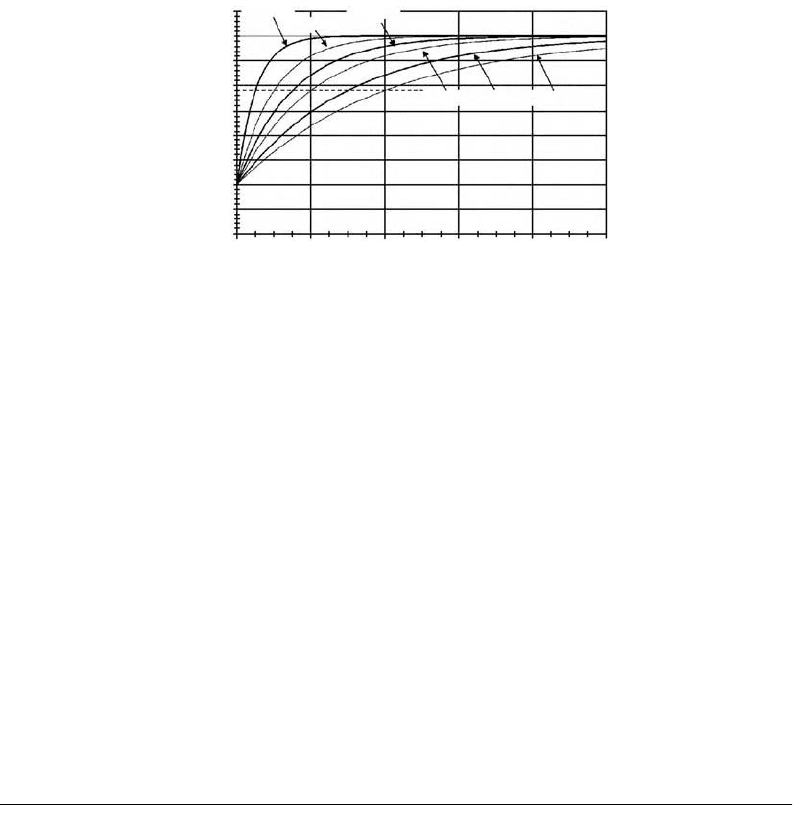
A set of typical first-order system step responses is shown in Figure 19.13. The initial value is arbitrarily
selected as 20 with final values of 80. Time constants ranging from 0.25 to 2 s are shown. Each of these
curves directly indicates its time constant at a key point on the curve. Substituting t =
τ
into the first-
order response equation with y
0
= 20 and y
∞
= 80 gives
Each curve crosses the y(
τ
) ≈ 57.9 line when its time constant
τ
equals the time t. This concept is
frequently used to experimentally determine time constants for first-order systems.
19.16 Underdamped Second-Order System Response
Second-order systems contain three primary elements: two energy storing elements and an element which
dissipates (or removes) energy. The two energy storing elements must store different types of energy. A
typical mechanical second-order system is the spring–mass–damper combination shown in Figure 19.14.
The spring stores potential energy (PE = kx
2
), while the mass stores kinetic energy (KE = mv
2
), where k
is the spring stiffness (typical units of N/m), x is the spring deflection (typical units of m), m is the mass
(typical units of kg), and v is the absolute velocity of the mass (typical units of m/s).
A common electrical second-order system is the resistor–inductor–capacitor (RLC) network, where
the capacitor and inductor store electrical energy in two different forms. The generic form of the dynamic
equation for an underdamped second-order system is
where y(t) is the dependent variable (velocity, acceleration, temperature, voltage, etc.), t is the independent
variable (time), is the damping ratio (a dimensionless quantity),
ω
n
is the natural frequency (typical
units of rad/s), and f(t) is the forcing function (or input).
FIGURE 19.13 First-order system—step response.
0
0
10
20
30
40
50
60
70
80
90
1
Output, y
Time, t (sec)
2345
= 0.25 s
τ
= 0.75 s
τ
= 2 s
τ
= 0.5 s
τ
= 1 s
τ
= 1.5 s
τ
yt() y
∞
y
0
y
∞
–()e
t/
τ
–
+=
y
τ
() 80 20 80–()e
1–
+ 57.9==
1
2
--
1
2
--
d
2
yt()
dt
2
--------------
2
ζω
n
dy t()
dt
------------
ω
n
2
yt()++ft()=
ζ
9258_C019.fm Page 9 Tuesday, October 2, 2007 1:24 AM
19-10 Mechatronic Systems, Sensors, and Actuators
The response of an underdamped second-order system to a unit step input can be deter-
mined as:
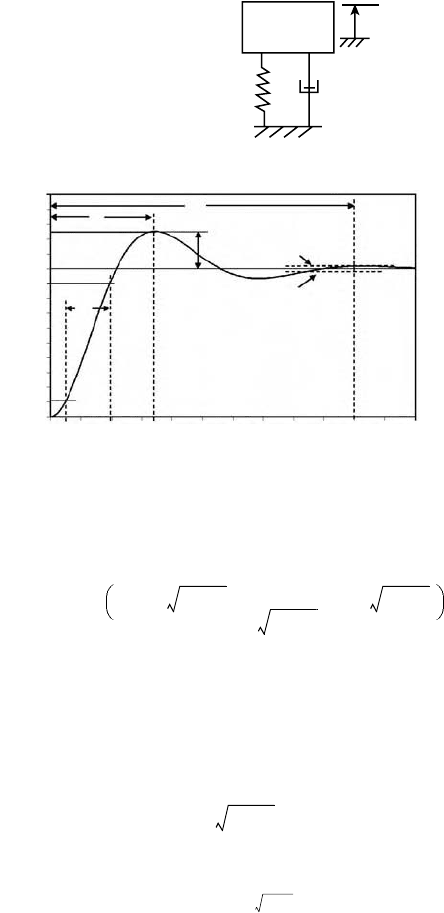
This second-order system step response is often characterized by a set of time response parameters
illustrated in Figure 19.15.
These time response parameters are functions of the damping ratio
ζ
and the natural frequency
ω
n
:
•
Peak time, T
P
: the time required to reach the first (or maximum) peak
•
Percent overshoot, %OS: amount the response exceeds or overshoots the steady-state value
•
Settling time, T
S
: the time when the system response remains within ±2% of the steady-state value
•
Rise time, T
R
: time required for the response to go from 10% to 90% of the steady-state value.
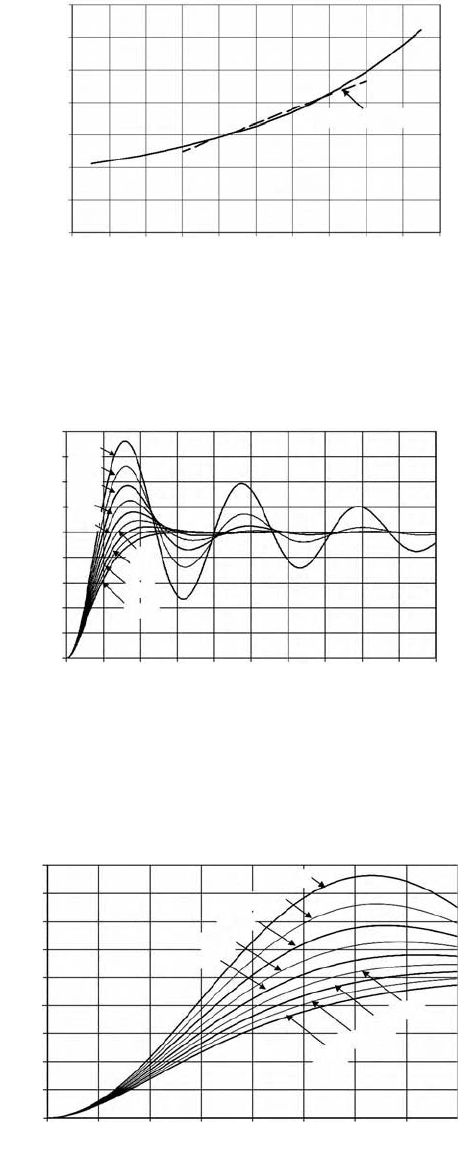
Figure 19.16 shows the nondimensional rise time (
ω
n
T
R
) as a function of damping ratio, z. A
frequently used approximation relating these two parameters is
Figures 19.17 and 19.18 show the unit step response of a second-order system as a function of damping
ratio
ζ
.
FIGURE 19.14 Spring–mass–damper system.
FIGURE 19.15 Second-order system—step response.
B
x
M
K
Output, y
0
0
0.3
1.1
1.2
1.3
1.4
1.5
1
0.5
0.6
0.7
0.8
0.9
0.4
0.1
0.2
213
T
s
T
s
y = 0.98
Overshoot (OS)
y = 1.02
T
R
4 5 6 7 8 9 10 11 12
Nondimensional time,
n
t
ω
0
ζ
1<≤()
yt() 1 e
ζω
n
t–
ω
n
1
ζ
2
– t
ζ
1
ζ
2
–
------------------
ω
n
1
ζ
2
– tsin+cos–=
T
P
π
ω
n
1
ζ
2
–
-------------------------
=
%OS 100= e
ζπ
/1
ζ
2
–()–
T
S
4
ζω
n
---------
=
ω
n
T
R
2.16
ζ
0.6 0.3
ζ
0.8≤+≈
9258_C019.fm Page 10 Tuesday, October 2, 2007 1:24 AM
Sensor and Actuator Characteristics 19-11
FIGURE 19.16 Rise time versus damping ratio,
ζ
.
FIGURE 19.17 Second-order system step response versus damping ratio,
ζ
.
FIGURE 19.18 Initial second-order system step response versus damping ratio,
ζ
.
0
0
0.5
1.5
2.5
3.5
1
2
3
0.1 0.4 0.5 0.6 0.7 0.8 0.9 10.30.2
n
T
R
= 2.16 + 0.6
Damping ratio,
ζ
ω
Nondimensional rise time,
n
T
R
ζ
ζ
Nondimensional time,
n
t
ω
Output, y
1.8
1.6
1.4
1.2
1.1
0.8
0.6
0.4
0.2
0
0246810121416
ζ
= 0.1
ζ
= 0.2
ζ
= 0.3
ζ
= 0.4
ζ
= 0.5
ζ
= 0.6
ζ
= 0.7
ζ
= 0.8
ζ
= 0.9
18 20
Nondimensional time,
n
t
ω
Output, y
1.8
0.8
0.6
0.4
0.2
0
1.6
1.4
1.2
1
ζ
= 0.1
ζ
= 0.2
ζ
= 0.3
ζ
= 0.4
ζ
= 0.5
ζ
= 0.6
ζ
= 0.7
ζ
= 0.8
ζ
= 0.9
0 0.5 1 1.5 2 2.5 3 3.5 4
9258_C019.fm Page 11 Tuesday, October 2, 2007 1:24 AM
19-12 Mechatronic Systems, Sensors, and Actuators
19.17 Frequency Response
The response of any dynamic system to a sinusoidal input is called the frequency response. A generic
first-order system with a sinusoidal input of amplitude A would have the dynamic equation of
where
ω
is the frequency of the sinusoidal input and
τ
is the first-order time constant. The steady-state
solution to this equation is
where is the amplitude ratio (a dimensionless quantity), and Φ = −tan
−1
(
τω
) is the
phase angle.
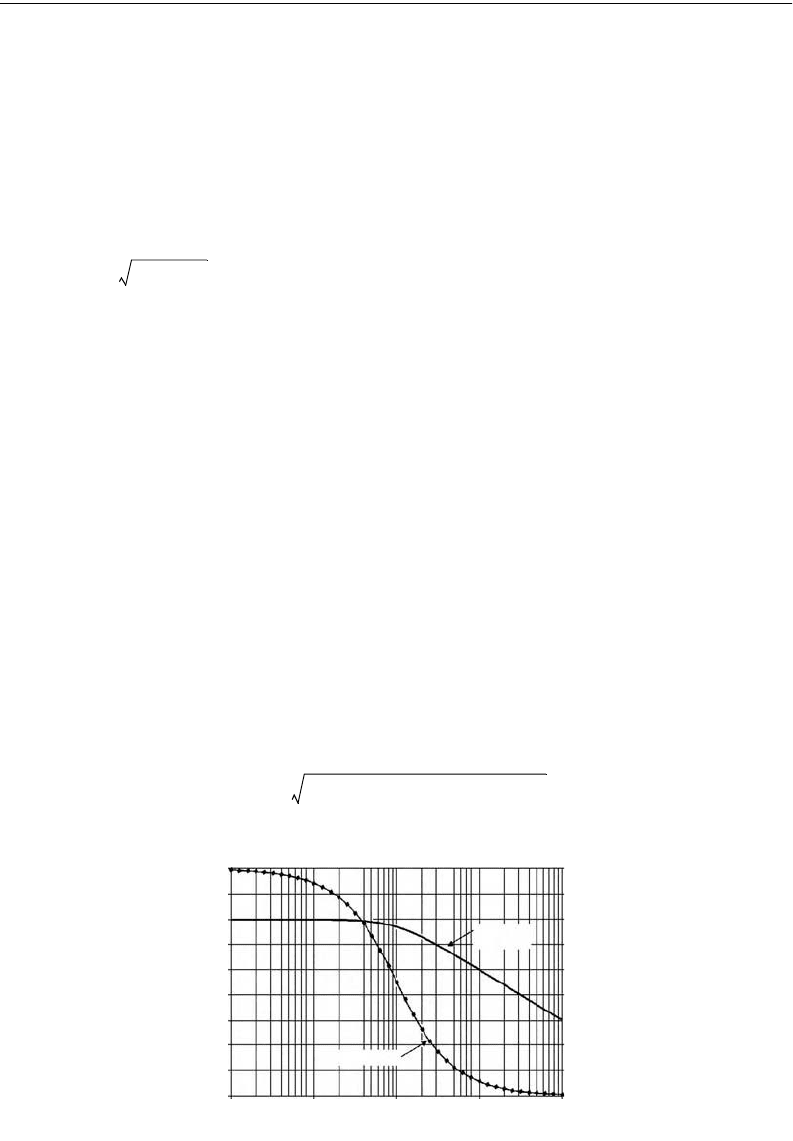
Figure 19.19 is a plot of the magnitude ratio M
dB
and the phase angle Φ as a function of the non-
dimensional frequency,
τω
. Note that the magnitude is frequently plotted in terms of decibels, where M
dB
= 20 log
10
(M).
The frequency at which the magnitude ratio equals 0.707 (or –3 dB) is called the bandwidth. For a
first-order system, the bandwidth is inversely proportional to the time constant. So,
ω
= 1/
τ
.
A generic second-order system with a sinusoidal input of amplitude A and frequency
ω
would have
the dynamic equation of
The steady-state solution to this equation is
where
FIGURE 19.19 Frequency response for first-order system.
dy t()
dt
------------
1
τ
--
yt()+ ft() A
ω
t()sin==
yt() AM
ω
t Φ+()sin=
M 1/ τω()
2
1+=
d
2
yt()
dt
2
--------------
2
ζω
n
dy t()
dt
------------
ω
n
2
yt()++A
ω
t()sin=
yt()
AM
ω
n
2
---------
=
ω
t Φ+()sin
M
1
1
ω
2
/
ω
n
2
()–[]
2
2
ζω
/
ω
n
()[]
2
+
-----------------------------------------------------------------------------
=
Nondimensional frequency,
τω
Phase angle
Magnitude
ratio
Magnitude ratio, M
dB
Phase angel, f (degree)
0.01
20
10
0
–10
–20
–30
–40
–50
–60
–70
–20
–10
0
–30
–40
–50
–60
–70
–80
–90
0.1 1 10 100
9258_C019.fm Page 12 Tuesday, October 2, 2007 1:24 AM
Sensor and Actuator Characteristics 19-13
is the amplitude ratio (a dimensionless quantity), and
is the phase angle.
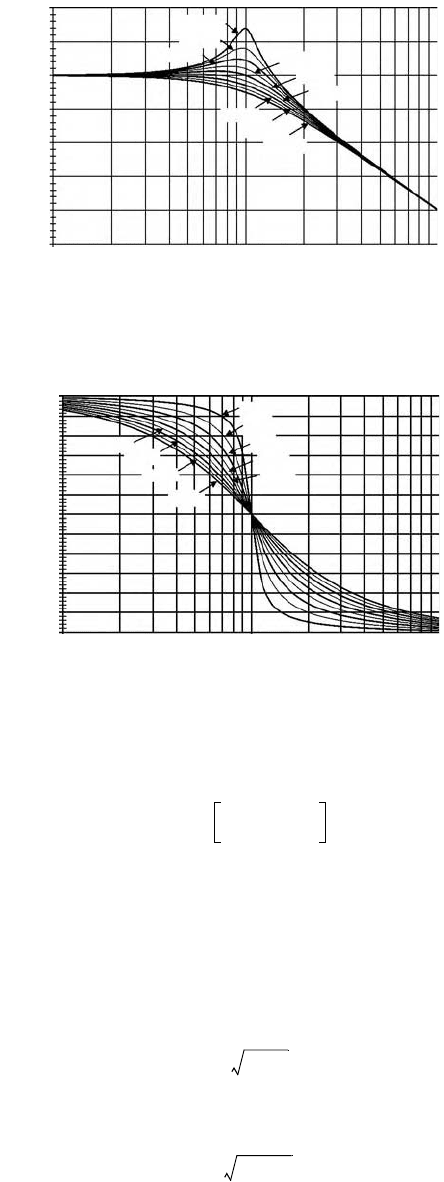
Figures 19.20 and 19.21 are plots of the magnitude response M
dB
= 20 log
10
(M) and the phase angle
Φ for the second-order system as a function of damping ratio,
ζ
. The peak value in the magnitude
response, M
P
, can be found by taking the derivative of M with respect to
ω
and setting the result to zero
to find (Nise, 1995)
This peak value in M occurs at the frequency
ω
P
given by
FIGURE 19.20 Frequency response magnitude for second-order system.
FIGURE 19.21 Frequency response phase angle for second-order system
.
Nondimensional frequency,
ω
/
ω
n
Magnitude ratio, M
dB
20
0.1 1 10
10
0
–10
–20
–30
–40
–50
ζ
= 0.1
ζ
= 0.2
ζ
= 0.3
ζ
= 0.4
ζ
= 0.5
ζ
= 0.6
ζ
= 0.7
ζ
= 0.8
ζ
= 0.9
Nondimensional frequency,
ω
/
ω
n
0
–10
30
–40
60
–70
80
–100
–120
–130
–150
–160
–180
0.1
Phase angle, Φ (degrees)
101
ζ
= 0.1
ζ
= 0.2
ζ
= 0.3
ζ
= 0.4
ζ
= 0.5
ζ
= 0.6
ζ
= 0.7
ζ
= 0.8
ζ
= 0.9
Φ tan
−1
2
ζω
/
ω
n
()
1
ω
2
/
ω
n
2
()–
----------------------------
–=
M
P
1
2
ζ
1
ζ
2
–
------------------------
=
ω
P
ω
n
12
ζ
2
–=
9258_C019.fm Page 13 Tuesday, October 2, 2007 1:24 AM
19-14 Mechatronic Systems, Sensors, and Actuators
The peak value in an experimentally determined frequency response can be used to estimate both the
natural frequency and damping ratio for a second-order system. These parameters can then be used to
estimate time domain responses such as peak time and percent overshoot.
Reference
Nise, N. S., Control Systems Engineering, 2nd ed., Benjamin/Cummings, 1995.
9258_C019.fm Page 14 Tuesday, October 2, 2007 1:24 AM

20-1
20
Sensors
20.1 Linear and Rotational Sensors .............................. 20-2
Contact
•
Infrared
•
Resistive
•
Tilt (Gravity)
•
Capacitive
•
AC Inductive
•
DC Magnetic
•
Ultrasonic
•
Magnetos-
trictive Time-of-Flight
•
Laser Interferometry
•
References
20.2 Acceleration Sensors .............................................. 20-12
Overview of Accelerometer Types
•
Dynamics and
Characteristics of Accelerometers
•
Vibrations
•
Typ ic al
Error Sources and Error Modeling
•
Inertial
Accelerometers
•
Electromechanical Accelerometers
•
Piezoelectric Accelerometers
•
Piezoresistive
Accelerometers
•
Strain-Gauge Accelerometers
•
Electrostatic
Accelerometers
•
Micro- and Nanoaccelerometers
•
Signal
Conditioning and Biasing
•
References
20.3 Force Measurement ................................................ 20-34
General Considerations
•
Hooke’s Law
•
Force Sensors
20.4 Torque and Power Measurement .......................... 20-48
Fundamental Concepts
•
Arrangements of Apparatus for
Torque and Power Measurement
•
Torq u e Tr an sd u cer
Te c h n o l o g i e s
•
Torque Transducer Construction,
Operation, and Application
•
Apparatus for Power
Measurement
•
References
20.5 Flow Measurement ................................................. 20-62
Introduction
•
Te r m i n o l o g y
•
Flow Characteristics
•
Flowmeter Classification
•
Differential Pressure
Flowmeter
•
Variable Area Flowme ter
•
Positive
Displacement Flowmeter
•
Turbine Flowme ter
•
Vortex Shedding Flowmeter
•
Electromagnetic
Flowmeter
•
Ultrasonic Flowmeter
•
Coriolis
Flowmeter
•
Two-Phase Flow
•
Flowmeter
Installation
•
Flowmeter Selection
•
References
20.6 Temperature Measurements .................................. 20-73
Introduction
•
Thermometers That Rely Upon Differential
Expansion Coefficients
•
Thermometers That Rely Upon
Phase Changes
•
Electrical Temperature Sensors and
Tr a n s d u c e r s
•
Noncontact Thermometers
•
Microscale
Temperature Measurements
•
Closing
Comments
•
References
20.7 Distance Measuring and Proximity Sensors ........ 20-88
Distance Measuring Sensors
•
Proximity Sensors
20.8 Light Detection, Image, and Vision Systems ....... 20-119
Introduction
•
Basic Radiometry
•
Light Sources
•
Light
Detectors
•
Image Formation
•
Image Sensors
•
Vision
Systems
•
References
20.9 Integrated Microsensors ........................................ 20-136
Introduction
•
Examples of Micro- and Nanosensors
•
Future Development Trends
•
Conclusions
•
References
20.10 Vision ...................................................................... 20-153
Digital Images
•
System Setup and Calibration
•
Machine
Vision
•
References
Kevin M. Lynch
Northwestern University
Michael A. Peshkin
Northwestern University
Halit Eren
Curtin University of Technology
M. A. Elbestawi
McMaster University
Ivan J. Garshelis
Magnova, Inc.
Richard Thorn
University of Derby
Pamela M. Norris
University of Virginia
Bouvard Hosticka
University of Virginia
Jorge Fernando Figueroa
NASA Stennis Space Center
H. R. (Bart) Everett
Space and Naval Warfare Systems
Center
Stanley S. Ipson
University of Bradford
Chang Liu
University of Illinois
Nicolas Vazquez
Dinesh Nair
University of Texas
9258_C020.fm Page 1 Tuesday, October 9, 2007 9:08 PM
20-2 Mechatronic Systems, Sensors, and Actuators
20.1 Linear and Rotational Sensors
Kevin M. Lynch and Michael A. Peshkin
By far the most common motions in mechanical systems are linear translation along a fixed axis and
angular rotation about a fixed axis. More complex motions are usually accomplished by composing these
simpler motions. In this chapter we provide a summary of some of the many technologies available for
sensing linear and rotational motion along a single axis. We have arranged the sensing modalities
according to the physical effect exploited to provide the measurement.
20.1.1 Contact
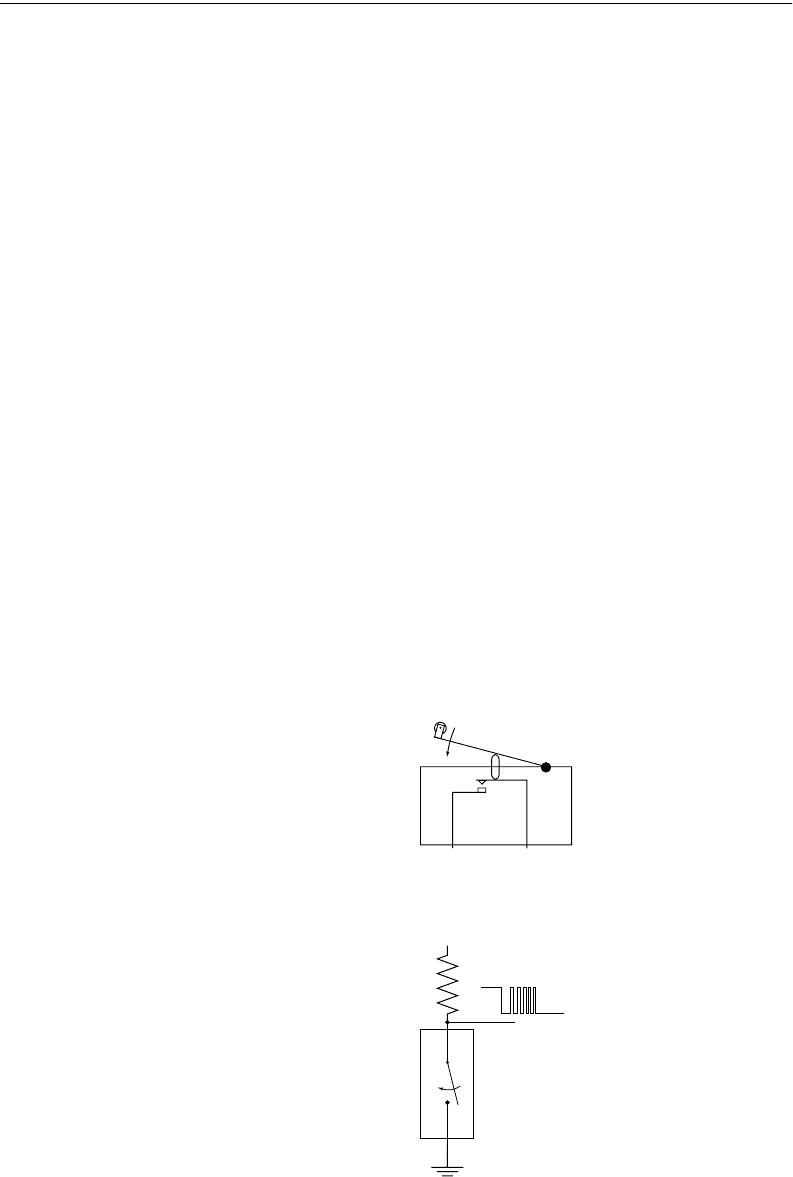
The simplest kind of displacement sensor is a mechanical switch which returns one bit of information:
touching or not touching. A typical microswitch consists of a lever which, when depressed, creates a
mechanical contact within the switch, which closes an electrical connection (Figure 20.1). Microswitches
may be used as bump sensors for mobile robots, often by attaching a compliant material to the lever
(such as a whisker) to protect the robot body from impact with a rigid obstacle. Another popular
application of the microswitch in robotics is as a limit switch, indicating that a joint has reached the limit
of its allowable travel.
Figure 20.2 shows a typical configuration for a microswitch. The pull-up resistor keeps the signal at
+V until the switch closes, sending the signal to ground. As the switch closes, however, a series of micro-
impacts may lead to “bounce” in the signal. A “debouncing” circuit may be necessary to clean up the
output signal.
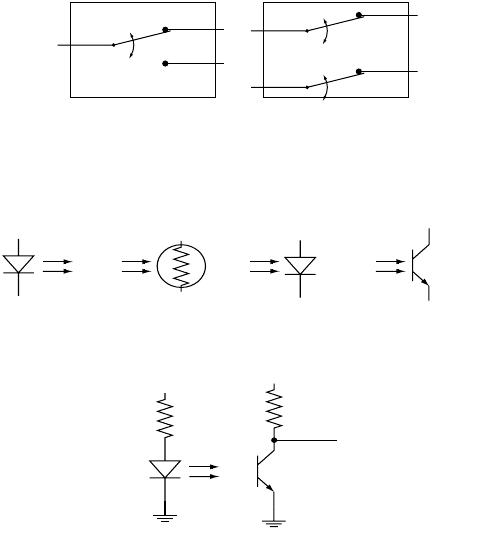
Switches may be designated NO or NC for normally open or normally closed, where “normally”
indicates the unactivated or unpressed state of the switch. A switch may also have multiple poles (P) and
one or two throws (T) for each pole. A pole moves as the switch is activated, and the throws are the
possible contact points for the pole. Thus an SPDT (single pole double throw) switch switches a single
pole from contact with one throw to the other, and a DPST (double pole single throw) switch switches
two poles from open to closed circuit (Figure 20.3).
FIGURE 20.1 A typical microswitch.
FIGURE 20.2 Signal bounce at a closing switch.
+V
9258_C020.fm Page 2 Tuesday, October 9, 2007 9:08 PM
Sensors 20-3
20.1.2 Infrared
Infrared light can be used in a variety of ways to measure linear and rotational displacement. Typically,
an infrared light-emitting diode (LED), or photoemitter, is used as a source, and an infrared sensitive
device is used to detect the emitted light. The detector could be a photoresistor or photocell, a variable
resistor which changes resistance depending on the strength of the incident light (possibly infrared or
visible); a photodiode, which allows the flow of electrical current in one direction in the presence of
infrared light, and otherwise acts as an open circuit; or a phototransistor. In a phototransistor, the incident
infrared light acts as the base current for the transistor, allowing the flow of collector current proportional
to the strength of the received infrared light (up to saturation of the transistor). Circuit symbols for the
various elements are shown in Figure 20.4.
If the emitter and detector are facing each other, they can be used as a beam-breaker, to detect if
something passes between. This is called a photointerrupter (Figure 20.5). If the emitter and detector are
free to move along the line connecting them, the strength of the received signal can be used to measure
the distance separating them. Infrared photodetectors may be sensitive to ambient light, however. To
distinguish the photoemitter light from background light, the source can be modulated (i.e., switched
on and off at a high frequency), and the detector circuitry designed to respond only to the modulated
infrared.
An emitter and detector facing the same direction can be used to roughly measure the distance to a
nearby surface by the strength of the returned light reflecting off the surface. This is called a
photoreflector
(Figure 20.6). Alternatively, such a sensor could be used to detect light absorbing or light reflecting surfaces
at a constant distance, as in mobile robot line following. Light polarizing filters can also be used on the
emitter and detector so that the detector only recognizes light reflected by a special “optically active”
retroreflecting surface.
FIGURE 20.3 SPDT and DPST switch configurations.
FIGURE 20.4 Optoelectronic circuit symbols and a typical emitter/detector configuration.
SPDT
DPST
LED Photoresistor Photodiode Phototransistor
+V
R
1
V
signal
R
2
+V
Typical configuration
9258_C020.fm Page 3 Tuesday, October 9, 2007 9:08 PM