Байдак Ю.В., Слободниченко Б.И. Электрооборудование технологических комплексов. Конспект лекций
Подождите немного. Документ загружается.


Тема 1. Основные сведения об электрических аппаратах (ЭА) и
методах расчета электродинамических усилий (ЭДУ)
1.1 Классификация ЭА
ЭА называется электротехническое устройство, предназначенное для
управления, регулирования и защиты электрических цепей и машин, а также
для контроля и регулирования различных неэлектрических величин и
процессов.
По назначению ЭА условно делятся на группы:
выключающие (коммутационные) - рубильники, переключатели, пакетные
выключатели;
защитные и ограничивающие (от перегрузок по току, перенапряжений,
токов короткого замыкания) – автоматические выключатели, плавкие
предохранители, разрядники, реакторы;
пускорегулирующие (для пуска, регулирования скорости вращения,
напряжения и тока электрических машин) - реостаты, контакторы,
магнитные пускатели;
контролирующие (контроль заданных параметров электрической цепи, и
подача сигнала или команды в случае их отклонения) - реле, датчики;
регулирующие (автоматическая непрерывная стабилизация или
регулирование заданного параметра электрической цепи, системы);
аппараты для измерений (изолируют цепи измерительных и защитных
приборов от силовой цепи, а также преобразуют измеряемую величину до
стандартного значения, удобного для измерения) – измерительные
трансформаторы тока, напряжения и др.
По принципу работы ЭА бывают:
контактные – с подвижными контактами, воздействующими на
управляемую цепь путем замыкания или размыкания этих контактов;
1
бесконтактные - не имеют размыкаемых или скользящих контактов,
управление осуществляется путем изменения своих электрических
параметров (R, L, C).
По функциональным признакам ЭА бывают:
автоматичекие – приходящие в действие от заданного режима работы
цепи или машины;
неавтоматические - действие которых зависит только от воли оператора.
В пределах одной группы или типа ЭА различают:
по напряжению (низкого ≤ 660В, высокого ≥1000В);
по роду тока (постоянного, переменного с частотой 50Гц и более 50Гц);
по роду защиты от воздействий окружающей среды в исполнениях:
открытом, защищённом, герметичном, взрывобезопасном;
по способу действия – электромагнитные, магнитоэлектрические,
индукционные, тепловые;
по ряду других факторов (быстродействие, способы гашения дуги и т.п.).
1.2 Основные требования, предъявляемые к ЭА
Предъявляемые требования к ЭА чрезвычайно разнообразны и зависят от
назначения, условий применения и условий их эксплуатации.
Все ЭА должны удовлетворять некоторым общим требованиям:
температура ЭА и его деталей при работе должна быть в пределах класса
его изоляции;
термическая и электродинамическая устойчивость должна сохранятся при
аномальных кратковременных воздействиях тока;
электрическая изоляция ЭА должна быть устойчивой к кратковременным
перенапряжениям;
контакты аппаратов должны коммутировать все токи рабочих режимов, а
также должны кратковременно выдерживать токи аварийных режимов;
к каждому ЭА предъявляются требования надежности и точности работы,
а также определенного быстродействия;
2
любой ЭА должен, по возможности, иметь минимальные, габариты, вес,
стоимость, а также быть простым по устройству, удобным в
обслуживании и технологичным в производстве.
1.3 Основные материалы, применяемые в аппаратостроении
Основные материалы могут быть разбиты на следующие группы:
проводниковые - главным образом медь, алюминий, сталь, латунь;
магнитные – различного рода стали и сплавы для магнитопроводов;
изоляционные - киперная лента, текстолит, гетинакс, бакелитовые сплавы,
керамика;
дуго(огне)стойкие изоляционные материалы - асбест, керамика,
пластмассы для дугогасительных камер;
сплавы высокого сопротивления – нихром, манганин, константан;
контактные материалы - серебро, медь, металлокерамика;
биметаллы – используется разное линейное удлинение механически
соединённых стали и алюминия, при нагревании протекающим по ним
током;
конструкционные материалы – металлы и пластмассы, обеспечивающие
форму элементов конструкций и воспринимающие механические усилия.
1.4 Условия возникновения электродинамических усилий (ЭДУ)
Известно, что обтекаемый током ί прямолинейный проводник длиной ℓ,
расположенный в магнитном поле с индукцией В, испытывает механическую
силу F, направление которой определяется правилом левой руки
ί F=I[ℓ*B],
ℓ F=ίBℓsinβ.
F
ί B
3
В системе из нескольких проводников с током можно всегда
представить, что любой из проводников расположен в магнитном поле
других (соседних) проводников и взаимодействует с ним. Это означает, что в
системе проводников с общим магнитным полем всегда существуют
механические силы, называемые электродинамическими усилиями (ЭДУ).
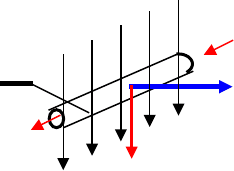
Весьма удобным для определения направления действия ЭДУ является
метод, предложенный академиком Б.Ф.Миткевичем и основанный на
представлении о боковом распоре и тяжении магнитных силовых линий.
Расчет ЭДУ ведется обычно либо исходя из закона Био-Савара-
Лапласа, либо по изменению запаса магнитной энергии системы.
1.5 Расчет ЭДУ на основании закона Био-Савара-Лапласа
Согласно закону Био-Савара-Лапласа, установленному опытным путём
в 1820 году, напряженность магнитного поля, созданная элементом dy
второго проводника с током ί
2
на участке dx первого проводника равна
ί
2
dy ℓ
2
dH
(dx)
= ί
2
Sin(α) dy/ ρ
2
,
ρ
α
где B = μ
0
H,
ί
1
B
+
dx ℓ
1
μ
0
= 4π 10
-7
Гн/м.
Если проводники расположены в одной плоскости, то B ℓ и sin β=1.
Весь проводник 2 создаст на участке dx первого проводника напряженность
магнитного поля
H
(dx)
= ∫ dH
(dx)
= ∫ ί
2
Sin(α) dy /ρ
2
,
ℓ
2
ℓ
2
и плотность магнитного потока – магнитную индукцию
B
(dx)
= μ
0
ί
2
/ 4π ∫ Sin(α) dy /ρ
2
.
4
2
1
ℓ
2
Тогда элементарное электродинамическое усилие, действующее на участок
dx с током ί
1
dF
(dx)
= ί
1
(μ
0
H
(dx)
/ 4π)
Здесь в выражении F=ίBℓsinβ составляющие ℓ = dx, sinβ = 1.
Результирующее электродинамическое усилие, с которым проводник 2
взаимодействует со всей длиной проводника 1
F = ∫ dF
(dx)
= ∫ ί
1
dx · μ
0
/ 4π ∫ ί
2
Sin(α) dy /ρ
2
.
ℓ
1
ℓ
1
ℓ
2
полагая, что токи ί
1
и ί
2
не изменяются по длине проводников, получим
F = (ί
1
ί
2
· μ
0
/ 4π )( ∫ dx ∫ Sin(α) dy /ρ
2
)
.
ℓ
1
ℓ
2
c ≡ k
1/2
- коэффициент контура,
который характеризует геометрическое взаимное расположение контуров с
током (безразмерная величина).
Окончательно ЭДУ равно F = с ί
1
ί
2
·10
-7
, (Н).
Пример: Пусть в двухпроводной линии с параллельными проводниками
длины ℓ, расположенными на расстоянии r текут токи ί
1
и
ί
2
,
Если отношение r/ ℓ <<1 , то c = 2ℓ / r , а электродинамическое усилие
равно:
F ί
1
F = 10
-7
ί
1
ί
2
2ℓ / r.
r
ί
2
F ℓ
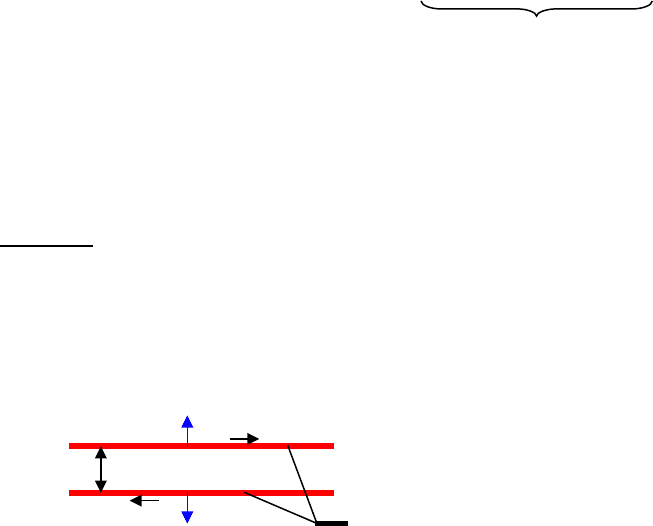
1.6 Расчет ЭДУ по изменению запаса электромагнитной энергии
Электромагнитное поле вокруг проводников и контуров с током
обладает запасом энергии:
5
Ф
W = L ί
2
/2 - для одного контура,
W = L
1
ί
1
2
/2 + L
2
ί
2
2
/2 +M ί
1
ί
2
- для двух контуров.
Ф
1
Ф
12
Ф
2
Всякое изменение контура – деформация,
либо взаимное расположение контуров
приводит к изменению запаса электромагнитной энергии, т.к. изменяются их
индуктивность либо взаимная индуктивность, т.е. dL , dM. При этом работа
сил в любой системе равна изменению запасённой энергии этой системы
A=F*dx=dW,
откуда,
dx
dW
F
X
т.е. ЭДУ в контуре или между контурами, действующее в
направлении оси (x), числено равно скорости изменения запаса энергии
системы при деформации ее в том же направлении, либо
F
x
= ί
2
dL /2dx ,
F
x
= ί
1
2
dL
1
/2dx + ί
2
2
dL
2
/2 dx + ί
1
ί
2
dM /dx.
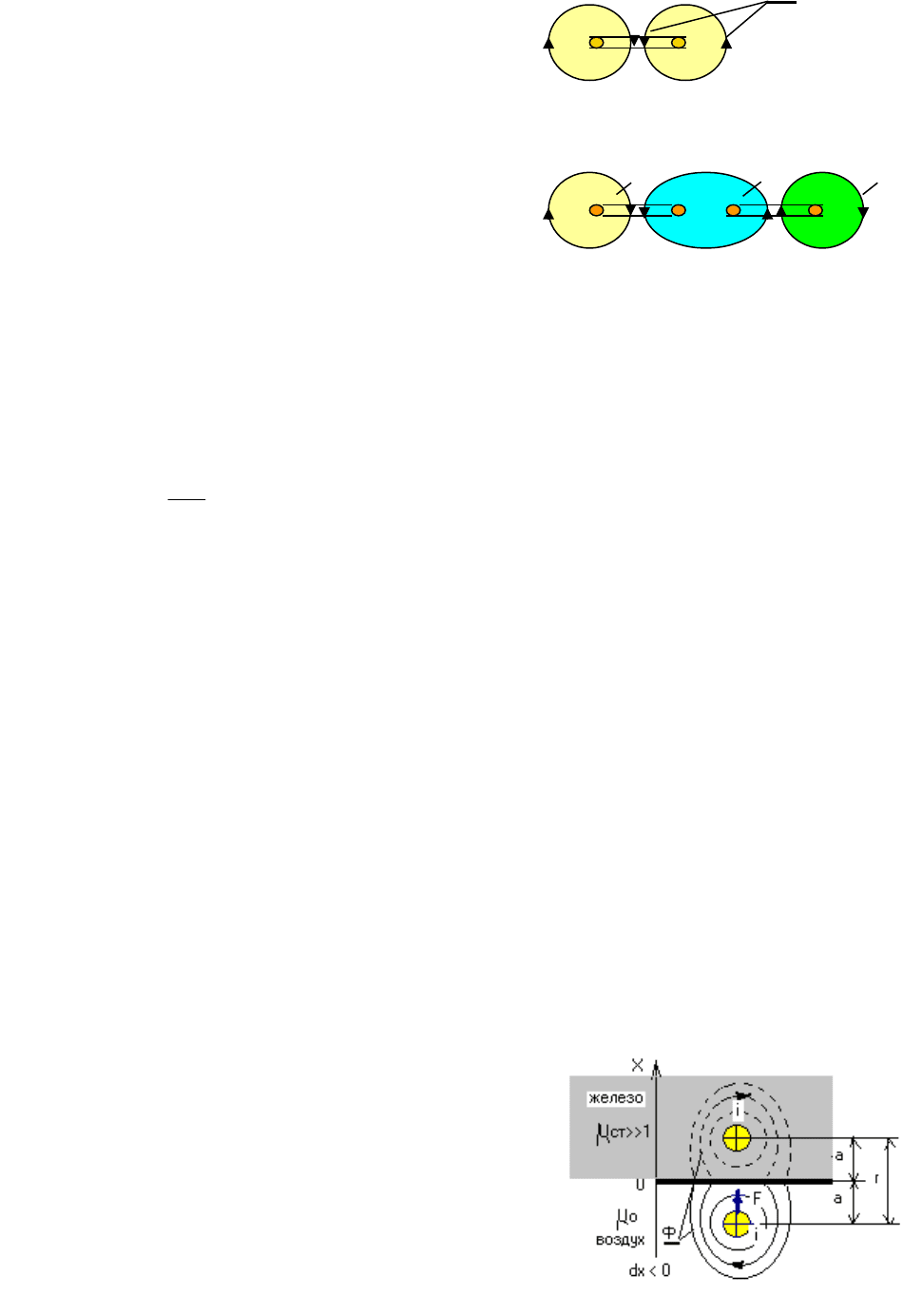
1.7 Силы взаимодействия между проводником с током и
ферромагнитной массой
Вблизи ферромагнитной массы магнитное поле вокруг проводника с
током искажается, магнитные силовые линии стремятся замкнуться по
ферромагнитной массе и возникают силы, стремящиеся притянуть проводник
к этой массе.
6
ί
ί
2
ί
1
Величина силы притяжения определяется
методом зеркального отображения, согласно
которому действие ферромагнитной массы
заменяется вторым проводником с током
того же направления, как бы зеркально отра-
женным относительно границы раздела сред. Картина магнитного поля при
этом не изменится, так как одновременно удвоится длина силовой линии и
удвоится магнитодвижущая сила проводника с током.
ЭДУ двух проводников будет равно
F = -10
-7
ί
2
ℓ / a,
где r = 2a, ℓ - длина проводника вблизи стали. Знак минус указывает на то,
что проводники с током одного направления притягиваются. Приведенное
выражение справедливо при μ
ст
>>μ
о
.
Если проводник стоком находится внутри ферромагнитной массы, то
тоже усилие будет отталкивать его от границы раздела сред.
Аналогичные силы притяжения будет испытывать проводник с током,
расположенный в щели дугогасительной решетки, выполненной из
ферромагнитных пластин.
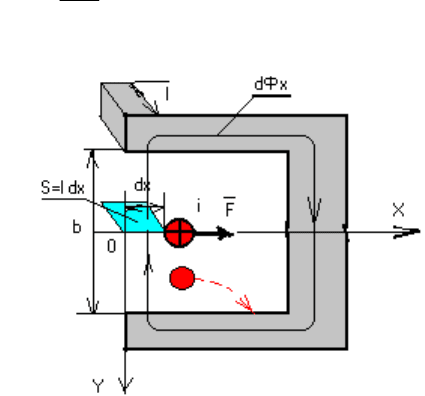
Здесь, как было показано выше, ЭДУ, действующее в направлении оси
Х, может быть найдено по скорости изменения запаса энергии системы
проводник с током – ферромагнетик, при деформации проводника в
направлении ферромагнетика по оси Х
dx
dW
F
X
, либо F
x
= ί
2
dL /2dx = ί dФ /2dх.
Если элементарный магнитный поток, пронизывающий элементарную
площадку S=ℓ·dx равен на участке магнитной цепи b – в воздухе
dФ
х
= ί dG
o
= ί μ
o
ℓdx / b,
7
то, пренебрегая проводимостью ферромагнетика по сравнению с воздухом в
зазоре b, получим ЭДУ:
F
x
= ί
2
μ
o
ℓ /2b =2π 10
-7
ί
2
ℓ / b = 6,28·10
-7
ί
2
ℓ / b.
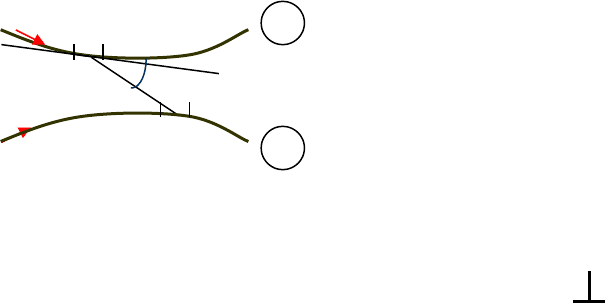
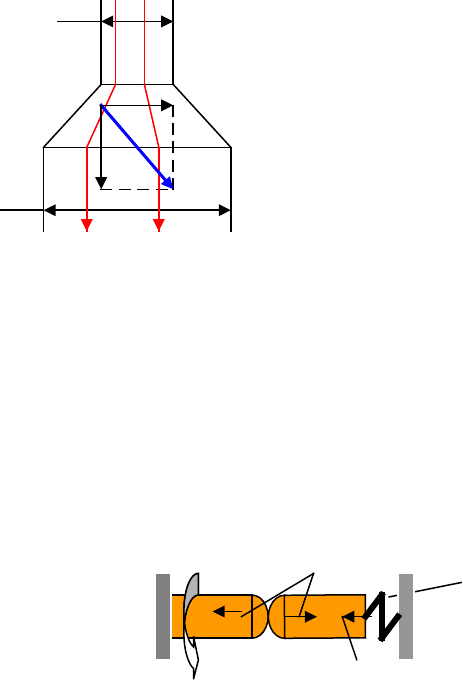
Немалый интерес представляет природа возникновения ЭДУ в месте
изменения сечения проводника.
d=2r
1
ί При изменении сечения проводника линии
тока искривляются так как плотность тока
B F
1
стремится быть равномерной по сечению в
диапазоне низких частот. Элементарная
d=2r
2
F
2
F трубка Δί
1
тока ί, взаимодействуя с магнитной
Δί
1
Δί
2
индукцией трубок токов Δί
2
,
Δί
3
и т.д. создаёт
ЭДУ F = F
1
+ F
2
. Продольное усилие F
2
,
действуя вдоль оси, стремится разорвать проводник (отбросить контакт) и
направлено в сторону большего сечения
F
2
= ί
2
μ
o
ℓn(r
2
/ r
1
) / 4π = 10
-7
ί
2
ℓn(r
2
/ r
1
).
Поперечное усилие F
1
стремится свернуть (срезать) проводник,
создавая крутящий момент.
F
2
пружина
контакт F
ПР
Мкр=F
1
(r
1
+r
2
)/2
Для компенсации ЭДУ F
2
устанавливают контактную пружину.
1.8 Электродинамические силы при переменном токе
Приведенные выше уравнения для ЭДУ справедливы и для
переменного тока, но в этом случае сила будет иметь переменное значение.
Если токи двух параллельных проводников равны и изменяются по
закону ί = I
m
Sinωt, где угловая частота ω = 2πf, то ЭДУ будут равны
f = 10
-7
с ί
2
= 10
-7
с I
m
2
Sin
2
ωt = 10
-7
с I
m
2
(1- Соs2ωt) /2, т.е.
f = 10
-7
с I
m
2
/2 - 10
-7
с I
m
2
Соs2ωt / 2 = f
1
+ f
2
.
8
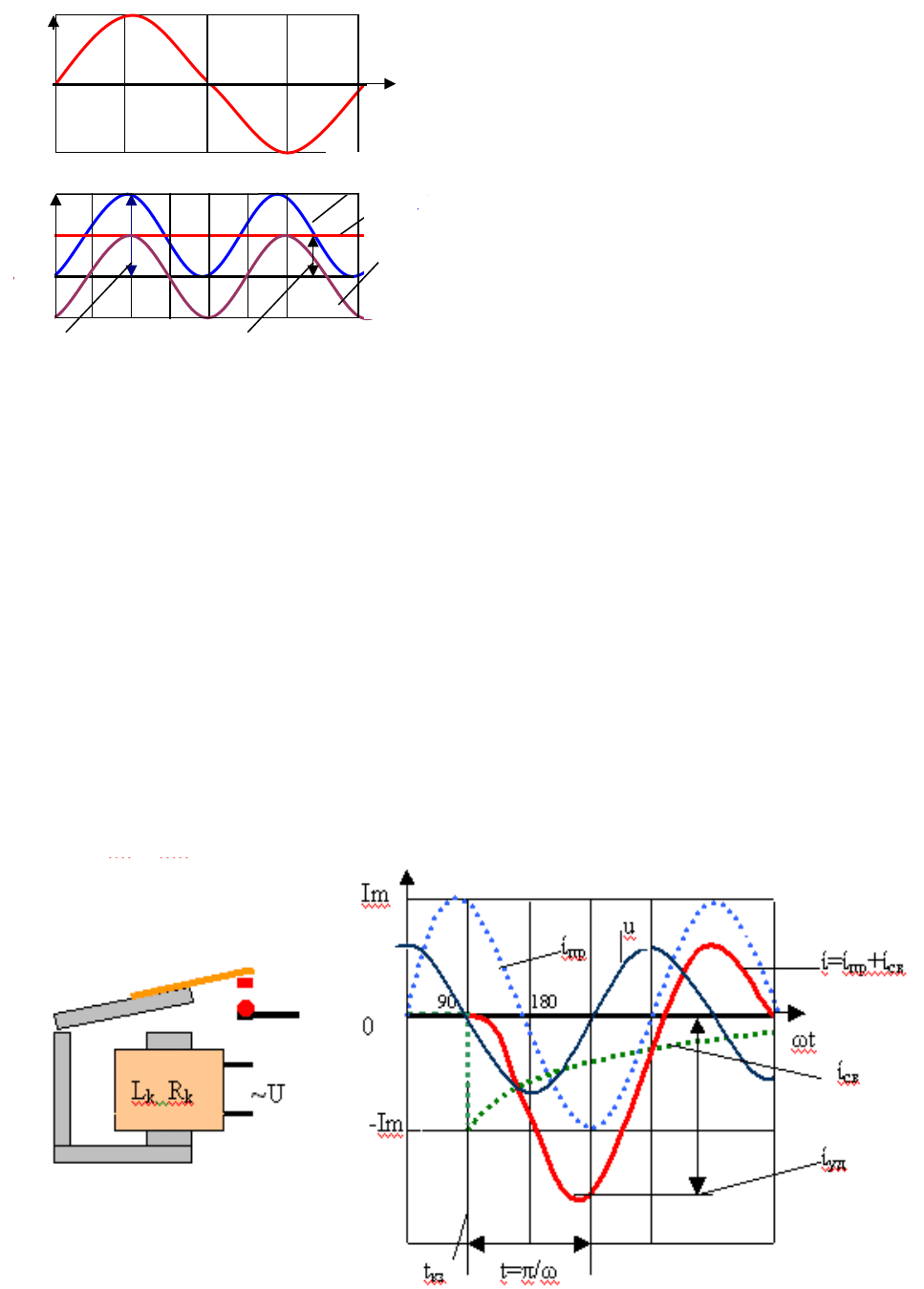
Как видно ЭДУ изменяется с
удвоенной частотой тока 2ωt не
меняя своего знака (пульсирую-
щая сила). Если -1≤ Соs2ωt ≤ 1, то 0
≤ f ≤ 10
-7
с I
m
2
. В расчётах
учитывается только амплитудное
значение тока Im=I√2, откуда F
m
=
10
-7
cI
m
2
=10
-7
2cI
2
. Как видно, ЭДУ
на переменном токе в два раза
больше чем на постоянном токе при
В большинстве электрических аппаратов в качестве исполнительного
механизма используется электромагнит, катушка которого по отношению к
приложенному напряжению u=U
m
Sin(ωt+ψ
u
) представляет активно-
индуктивную нагрузку. При включении такой катушки на синусоидальное
напряжение ток в её цепи достигает принуждённого значения не сразу, а в
течение времени переходного процесса равного 3…5Т, где постоянная
времени Т = L
k
/ R
k
.
9
ί
π
2
ωt
0
2π
π
f
f
m
=cI
m
2
0
ωt
f
1
f2
f
ср
=cI
m
2
/2
f
одинаковом его действующем значении и, кроме того, пульсирующая сила
более разрушительна, чем постоянно действующая.
Характер протекания переходного процесса, определяемый свободной
составляющей тока ί
св
, существенно зависит от момента включения цепи, то
есть от начальной фазы напряжения ψ
u
. Полный ток катушки во время
переходного процесса определяется уравнением
ί(t) = ί
пр
(t) + ί
св
(t) = I
m
(Cosωt e
t/T
).
Приведенное уравнение тока справедливо для любого момента времени t и, в
том числе, для t = π/ω с момента начала переходного процесса t
кз
Так, если
ψ
u
–φ = ±π/2, где угол сдвига вектора тока I
m
относительно вектора
напряжения U
m
φ=arctg L
k
/R
k
, то при t = π/ω получим Cosωt=-1 и ток
ί=ί
уд
=І
m
(1e
π/ωTk
)=k
уд
·I
m
.
Здесь ударный коэффициент тока
k
уд
=1+ e
π/ωTk
≈ 1,3…1,8.
Следовательно, при коротких замыканиях в токопроводящих системах,
включении электромагнита мгновенное значение тока в проводах, катушке
может быть равно ί
уд макс
= (1,3 – 1,8) І
m
. Поэтому максимальное усилие, на
которое следует рассчитывать токопроводящие цепи переменного тока
F
m
=10
-7
c ί
2
уд макс
=10
-7
c (1,8· I√2)
2
=10
-7
c· 6,48·I
2
.
ЭДУ на переменном токе почти в 6,5 раз больше чем при таком же
действующем значении постоянного тока.
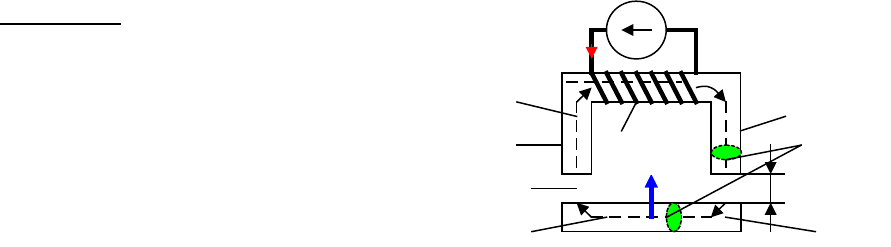
Пример 1.
Уравнение магнитного равновесия цепи,
согласно закону полного тока, имеет вид
Hℓ = ίw или ί = Hℓ /w.
Поскольку энергия, затраченная источником
постоянного тока на создание магнитного
поля в цепи, где приращение потокосцепление dΨ = wS·dB, а длина
магнитной силовой линии ℓ = ℓ1 + ℓ2 + 2δ, равна:
ψ
B
H
W
m
= ∫ ί dΨ = ℓ S ∫HdB = V∫μμ
o
HdH =Vμμ
o
H
2
/2 = VHB /2,
0 0 0
10
δμ
o
μ
якорь
ярмо
Е
I
w
ℓ
1
ℓ
2
F
S