Balakumar Balachandran, Magrab E.B. Vibrations
Подождите немного. Документ загружается.

fixed at both ends, while the beam model used for the work piece is consid-
ered fixed at one end and hinged or free at the other end where it is being cut.
In Section 4.4, the stability of a machine tool is determined from a vi-
bratory model to avoid undesirable cutting conditions called chatter. This type
of analysis can be used to choose parameters such as width of cut, spindle
rpm, etc. In Chapter 9, vibrations of beams used in the model in Figure 2.27
are discussed at length.
2.6 DESIGN FOR VIBRATION
Principles that govern single degree-of-freedom systems, multiple degree-of-
freedom systems, and continuous vibratory systems are covered in this book
and are presented along with information needed to experimentally, numeri-
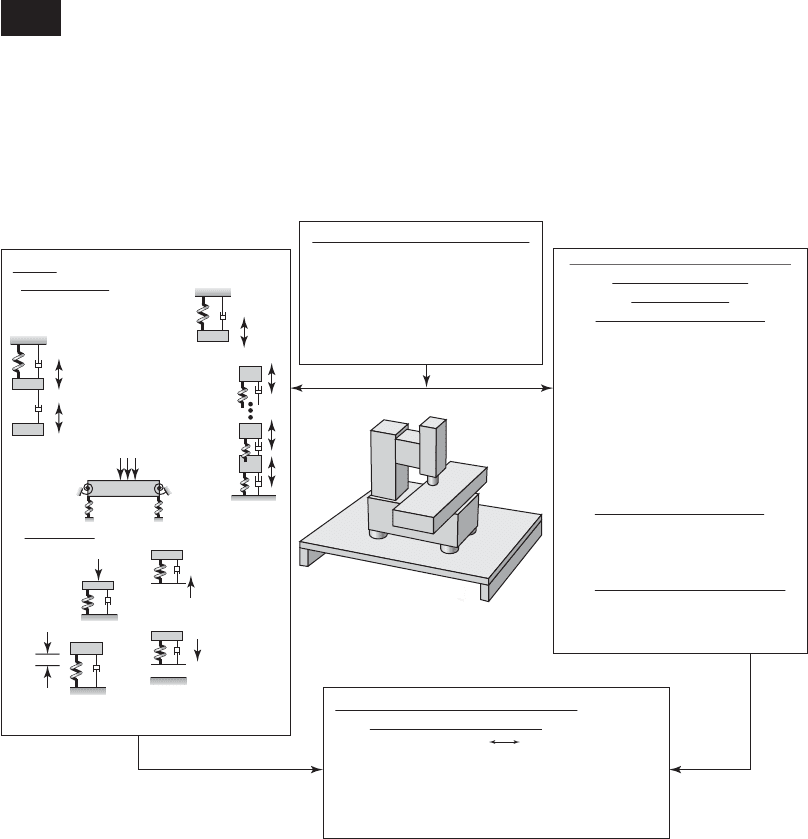
cally, and analytically investigate a vibratory system. In Figure 2.28, we show
60 CHAPTER 2 Modeling of Vibratory Systems
Mass
Stiffness
Linear
Nonlinear
Damping
Viscous
Fluid
Material
Dry friction
System Characterization
Natural frequency
Impulse response
Transfer function
Excitation Characterization
Harmonic
Transient
Random
Design for Vibration Objectives
Isolation
Absorption
Natural frequency
Damping ratio
Filter
Mode shape
Numerical Evaluation and Analysis
Response Characteristics
Time Domain Frequency Domain
Displacement
Velocity
Acceleration
Force at base
System
Experiments and Measurements
Data Collection and
Interpretation
Parameter Identification
Model
Assumptions
1 degree-of-freedom
2 degree-of-freedom
N
degree-of-freedom
Beam
Excitation
Force
Base
Velocity
Displacement
FIGURE 2.28
Design for vibration.
Exercises 61
EXERCISES
Section 2.1
2.1 Examine Eqs. (2.1) and (2.5) and verify that the
units (dimensions) of the different terms in the re-
spective equations are consistent.
Section 2.2
2.2 Consider the slider mechanism of Example 2.2 and
show that the rotary inertia J
O
about the pivot point O
is also a function of the angular displacement w.
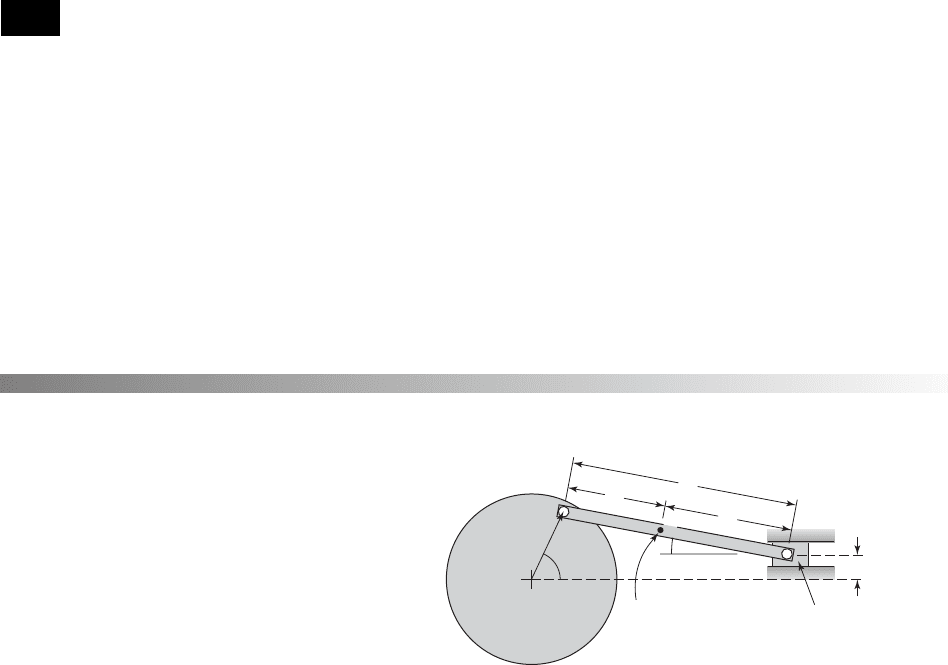
2.3 Consider the crank-mechanism system shown in
Figure E2.3. Determine the rotary inertia of this sys-
tem about the point O and express it as a function of
the angular displacement u. The disc has a rotary
inertia J
d
about the point O. The crank has a mass m
G
and rotary inertia J
G
about the point G at the center of
mass of the crank. The mass of the slider is m
p
.
Section 2.3.2
2.4 Find the equivalent length L
e
of a spring of con-
stant cross section of diameter d
2
that has the same
spring constant as the tapered spring shown in Case 2
of Table 2.3. Both springs have the same Young’s
modulus E.
2.5 Extend the spring combinations shown in Figures
2.6b and 2.6c to cases with three springs. Verify that
the equivalent stiffness of these spring combinations
is consistent with Eqs. (2.14) and (2.16), respectively.
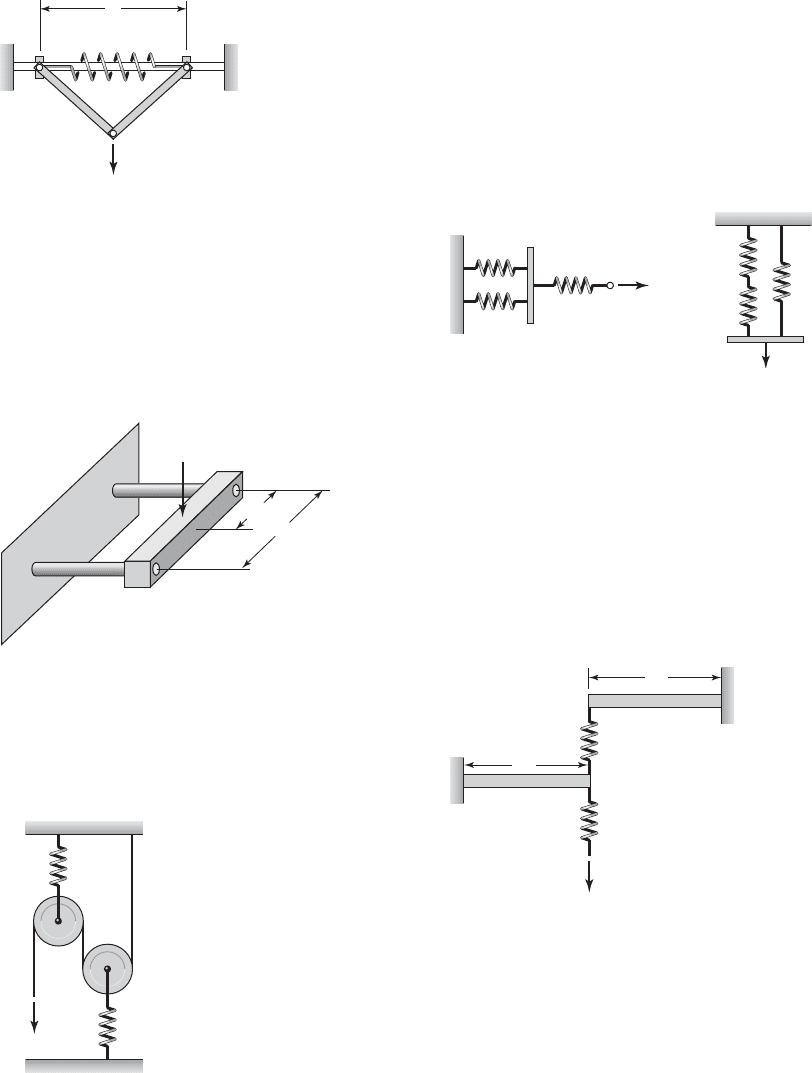
2.6 Consider the mechanical spring system shown in
Figure E2.6. Assume that the bars are rigid and
determine the equivalent spring constant k
e
, which we
can use in the relation F k
e
x.
how these different aspects are used to design a system to have specific vi-
bratory characteristics.
2.7 SUMMARY
In this chapter, the inertia elements, stiffness elements, and dissipation ele-
ments that are used to construct a vibratory model were discussed. An ideal in-
ertia element, which does not have any stiffness or dissipation characteristics,
can store or release kinetic energy. An ideal stiffness element, which does not
have any inertia or dissipation characteristics, can store or release potential en-
ergy. The stiffness element can be due to a structure, a fluid element, or gravity
loading. The notion of equivalent stiffness has been introduced. An ideal dissi-
pation element, which does not have any stiffness or inertia characteristics, is
used to represent energy losses of the system. The notion of equivalent damp-
ing has also been introduced.
l
a
b
m
G
, J
G
G
m
p
J
d
O
r
d
FIGURE E2.3
62 CHAPTER 2 Modeling of Vibratory Systems
2.7
Consider the three beams connected as shown in
Figure E2.7. The beam that is attached to the ends of
the two cantilever beams is pinned so that its ends can
rotate unimpeded. Determine the system’s equivalent
spring constant for the transverse loading shown.
2.10 For the two cantilever beams whose free ends are
connected to springs shown in Figure E2.10, give the
expressions for the spring constants k
1
and k
2
and
determine the equivalent spring constant k
e
for the
system.
L
L/2
E, I
F
E
1
, I
1
, L
1
E
1
, I
1
, L
1
FIGURE E2.7
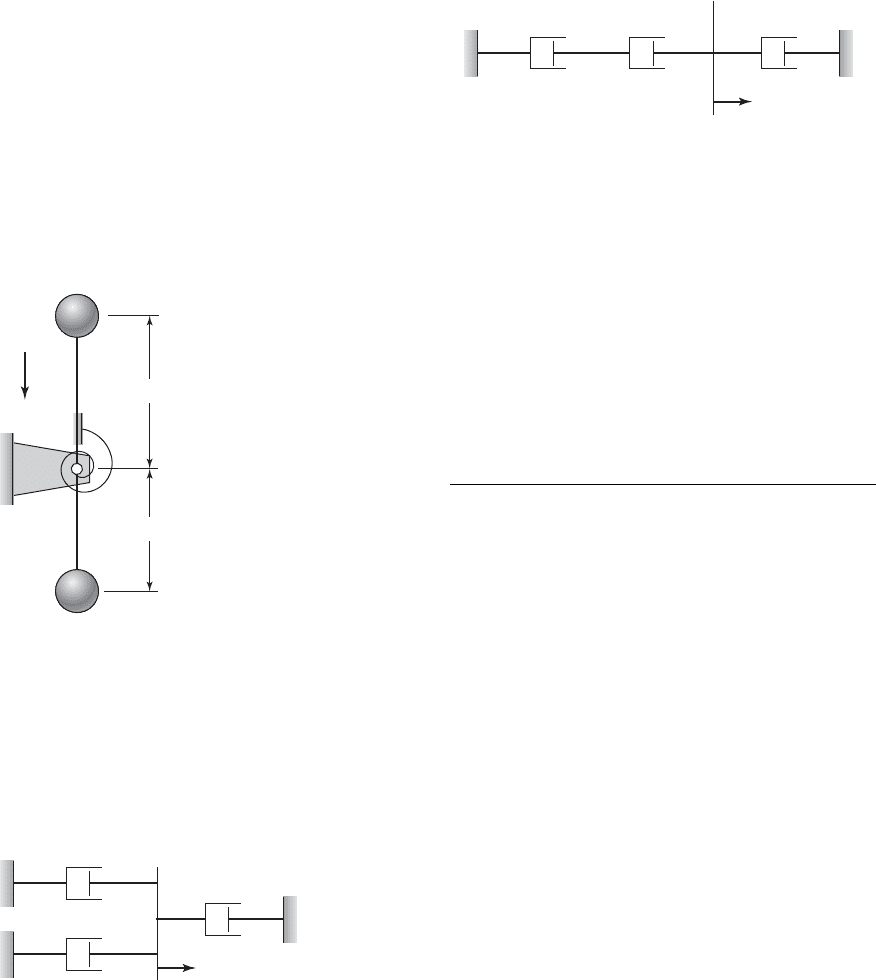
2.8 For the weightless pulley system shown in Fig-
ure E2.8, determine the equivalent spring constant.
k
1
k
2
F, x
FIGURE E2.8
Recall that when the center of the pulley moves by an
amount x, the rope moves an amount 2x.
2.9 Determine the equivalent stiffness for each of the
systems shown in Figure E2.9. Each system consists
of three linear springs with stiffness k
1
, k
2
, and k
3
.
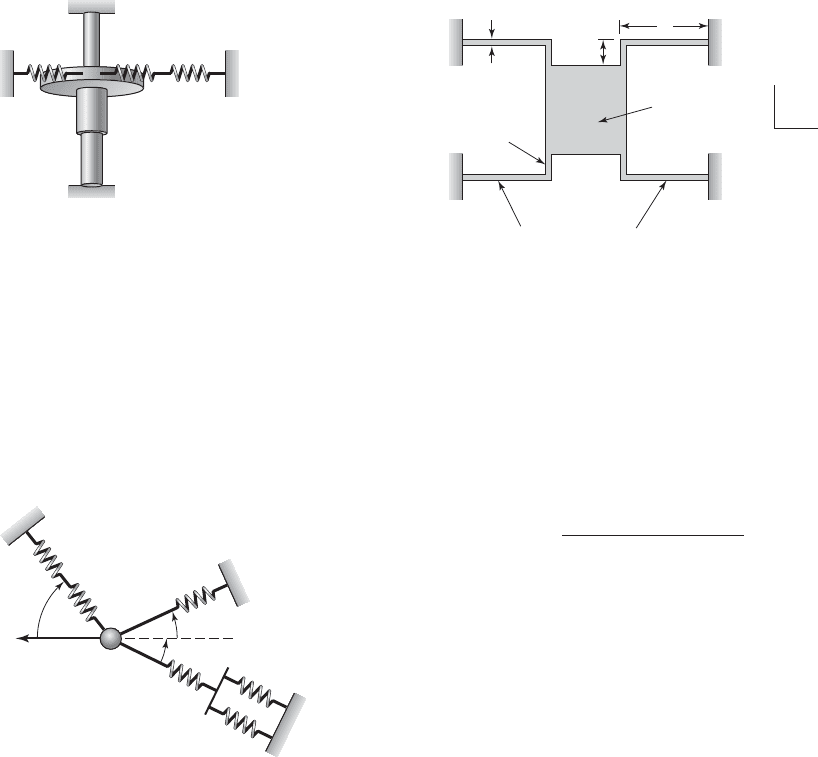
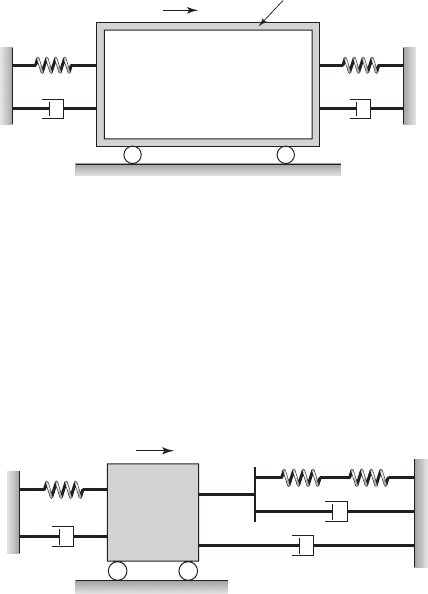
2.11 For the system of translation and torsion springs
shown in Figure E2.11, determine the equivalent
spring constant for torsional oscillations. The disc has
a radius b, and the translation springs are tangential to
the disc at the point of attachment.
k
1
k
1
k
2
k
3
k
2
k
3
FIGURE E2.9
k
3
k
2
k
4
k
1
E
1
, I
1
E
2
, I
2
L
1
L
2
F
FIGURE E2.10
a
k
LL
F, x
FIGURE E2.6
Exercises 63
2.12
For the system of translation springs shown
in Figure E2.12, determine the equivalent spring
constant for motion in the horizontal (x) direction
only. Assume that so that the u
j
remain
constant.
0¢x 0 1
The equivalent stiffness of each of these flexures
in the X-direction can be shown to be
where the Young’s modulus of elasticity is E, which
has a value of 160 GPa for the polysilicon material
from which the flexure is fabricated. The dimensions
of each crab leg are as follows: L 100 m and
b b
t
h 2 m. For the thigh length L
t
spanning
the range from 10 m to 75 m, plot the graph of the
equivalent stiffness of the system versus L
t
.
2.14 Based on the expression for k
flexure
provided in
Exercise 2.13, the sensitivity of the equivalent stiff-
ness of each flexure with respect to the flexure width
b and the thigh width b
t
can be assessed by determin-
ing the derivatives dk
flexure
/db and dk
flexure
/db
t
, respec-
tively. Carry out these operations and discuss the ex-
pressions obtained.
2.15 Find the torsion-spring constant k
te
of the stepped
shaft shown in Figure E2.15, where each shaft has the
same shear modulus G. Determine the equivalent
spring length of a shaft of constant diameter D
e
and
length L
e
that has the same spring constant as the tor-
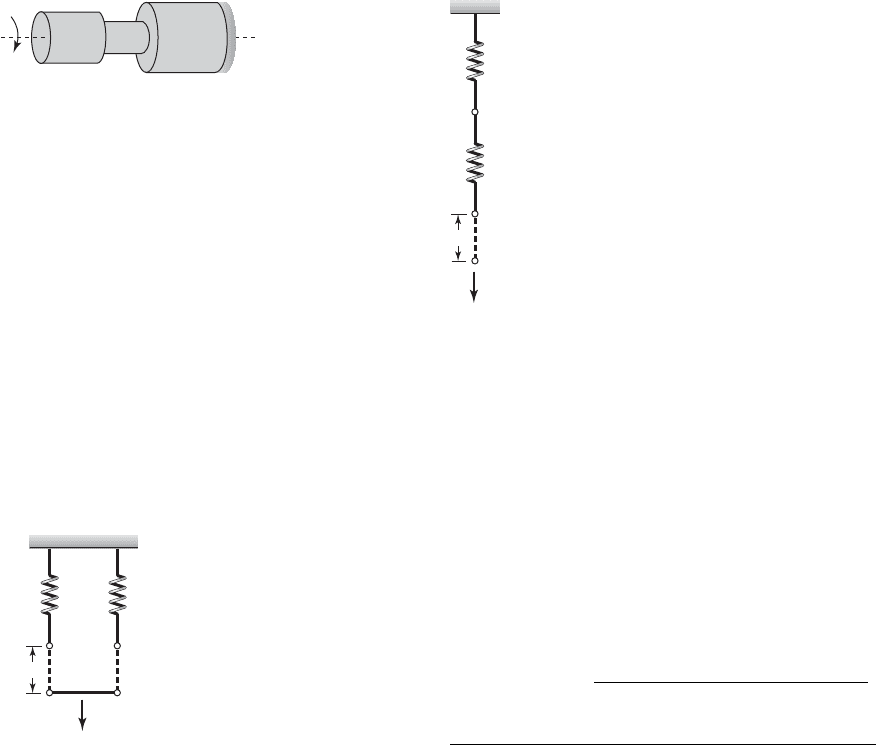
sion spring shown in Figure E2.15.
k
flexure
Ehb
3
14L L
t
1b/b
t
2
3
2
L
3
1L L
t
1b/b
t
2
3
2
2.13 Consider the system shown Figure E2.13, which
lies in the X–Y plane. This system, which is called a
crab-leg flexure, is used in microelectromechanical
sensors. A load along the X direction is applied to the
mass to which all of the four crab-leg flexures are at-
tached. Each flexure has a shin of length L along
the X direction, width b along the Y direction, and
thickness h along the Z direction. The thigh of each
flexure has a length L
t
along the Y direction, a width b
t
along the X direction, and a thickness h along the
Z direction.
FIGURE E2.11
k
t2
k
t1
k
t3
k
1
k
2
k
3
FIGURE E2.12
X
Y
L
L
t
b
Mass
Thigh
ShinCrab-leg flexture
FIGURE E2.13
Source: G.K.Fedder, "Simulation of Microelectromechanical Sys-
tems", Ph.D. Dissertation, Department of Electrical Engineering
and Computer Sciences, University of California, Berkeley, CA,
(1994). Reprinted with permission of the author.
k
6
k
5
k
4
k
3
k
1
k
2
x
1
2
3
64 CHAPTER 2 Modeling of Vibratory Systems
2.18
Consider the data in Table E2.18 in which the
experimentally determined tire loads versus tire de-
flections have been recorded. These data are for a set
of dual tires and a single wide-base tire.
18
The infla-
tion pressure for all tires is 724 kN/m
2
. Examine the
stiffness characteristics of the two different tire sys-
tems and discuss them.
2.17 Consider the two nonlinear springs in series
shown in Figure E2.17. The force-displacement rela-
tions for each spring are, respectively,
a) Obtain the expressions from which the equivalent
spring constant can be determined.
b) If F 1000 N, k
1
50,000 N/m, k
2
25,000 N/m,
and a 2m
2
, determine the equivalent spring
constant.
F
j
1x 2 k
j
x k
j
ax
3
j 1, 2
F
2
(x)F
1
(x)
x
F
FIGURE E2.16
18
J. C. Tielking, “Conventional and wide base radial tyres,” in Pro-
ceedings of the Third International Symposium on Heavy Vehicle
Weights and Dimensions, D. Cebon and C. G. B. Mitchell, eds.,
Cambridge, UK, 28 June–2 July 1992, pp. 182–190.
TABLE E2.18
Tire Load Versus Deflection Data
Tire Deflection
Tire Load Dual Tire Single Wide-Base
(N) (mm) Tire (mm)
00 0
8896.4 7.62 10.2
17793 14 19
26689 19 27.9
35586 24.1 35.6
44482 27.9 41.9
Section 2.3.4
2.19 Consider the manometer shown in Figure 2.16
and seal the ends. Assume that the initial gas pressure
of the sealed system is P
o
and that L
o
is the initial
Section 2.3.3
2.16 Consider the two nonlinear springs in parallel that
are shown in Figure E2.16. The force-displacement
relations for each spring are, respectively,
a) Obtain the expressions from which the equivalent
spring constant can be determined.
b) If F 1000 N, k
1
k
2
50,000 N/m, and a
2m
2
, determine the equivalent spring constant.
F
j
1x 2 k
j
x k
j
ax
3
j 1, 2
L
2
, D
2
L
3
, D
3
L
1
, D
1
FIGURE E2.15
F
2
(x)
F
1
(x)
x
F
FIGURE E2.17
Exercises 65
2.22
Determine the equivalent damping for the system
shown in Figure E2.22.
length of the cavity. Determine the equivalent spring
constant of the system when the column of liquid un-
dergoes “small” displacements.
2.20 Consider “small” amplitude angular oscillations
of the pendulum shown in Figure E2.20. Considering
the gravitational loading and the torsion spring k
t
at
the pivot point, determine the expression for the sys-
tem’s equivalent spring constant. The masses are held
with rigid, weightless rods for the loading shown.
g
b
a
k
t
m
1
m
2
FIGURE E2.20
Section 2.4.1
2.21 Determine the equivalent damping of the system
shown in Figure E2.21.
c
3
c
1
c
2
FIGURE E2.21
c
1
c
2
c
3
FIGURE E2.22
TABLE E2.23
Racecar Damper
Damper Force Damper Rod Speed
Magnitude (N) (mm/s)
00
57.83 2.54
115.7 5.08
177.9 7.62
266.9 10.2
355.9 12.7
444.8 15.2
489.3 17.8
533.8 20.3
578.3 22.9
622.8 25.4
667.2 27.9
711.7 30.5
756.2 33
800.7 35.6
845.2 38.1
889.6 40.6
19
Racecar dampers are called “shocks” in the United States, and
they have different damping characteristics during compression
(called “bump”) and expansion (called “rebound”) phases. For ma-
terial on racecar damping, see, for example, P. Haney and J. Braun,
Inside Racing Technology, (ISBN 0-9646414-0-2).
2.24 Determine the viscosity of the fluid that one
needs to use to realize a parallel-plate damper when
the top plate has an area of 0.02 m
2
, the gap between
the parallel plates h 0.2 mm, and the required
damping coefficient is 20 N s/m.
#
2.23 Representative damping-force magnitudes ver-
sus speed data are given in Table E2.23 for a racecar
damper in compression.
19
Examine these data and dis-
cuss the type of damping model that can be used to
represent them.
66 CHAPTER 2 Modeling of Vibratory Systems
response, is possible when a vibratory system is ex-
cited by a harmonic force. Evaluate the work done by
the spring force and the work done by the damper
force, which are given by the integrals
2.29 For the system of Exercise 2.28, assume
k 1000 N/m, c 2500 N/(m/s), X
o
0.1 m, and
v 9 rad/s. Plot the graph of the sum of the spring
force and damper force versus the displacement; that
is, versus x.
2.30 For the system of Exercise 2.28, assume that
k 0, c 0, and v 0. Show that the graph of
versus x will have the form of an ellipse.
Section 2.4.2
2.31 Consider the viscous-damping model given by
Eq. (2.46) and the dry-friction model given by
Eq. (2.52). Sketch the force versus velocity graphs
in each case for the following parameter values: c
100 N/(m/s), m 100 kg, and m 0.1.
2.32 Normalize the linear viscous-damper force given
by Eq. (2.46) using the damping coefficient c, the dry
friction force given by Eq. (2.52) using mmg, the
fluid-damping force given by Eq. (2.54) using the
damping coefficient c
d
, and the hysteretic force
given by Eq. (2.57) using kpb
h
. Plot the time histories
of the normalized damper forces versus time
for harmonic displacement of the form x(t)
0.4sin (2pt) m. Discuss the characteristics of these
plots.
2.33 Construct vibratory models for each of the three
systems shown in the Figure E2.33. Discuss the num-
kx cx
#
kx cx
#
E
d
x12p/v2
x102
cx
#
dx
2p/v
0
cx
#
2
dt
E
k
x12p/v2
x102
kxdx
2p/v
0
kxx
#
dt
2.27 Represent the vibratory system given in Fig-
ure E2.27 as an equivalent vibratory system with mass
m, equivalent stiffness k
e
, and equivalent damping
coefficient c
e
.
k
3
k
2
k
1
c
1
c
2
c
3
x
m
FIGURE E2.27
2.25 Determine the equivalent damping coefficient for
the following nonlinear damper:
where c
1
= 5 N s/m and c
3
= 0.6 N s
3
/m
3
. Note: the
damper is to be operated around a speed of 5 m/s.
2.26 Represent the vibratory system given in Fig-
ure E2.26 as an equivalent vibratory system with
mass m, equivalent stiffness k
e
, and equivalent damp-
ing coefficient c
e
.
##
F1x
#
2 c
1
x
#
c
3
x
#
3
c
2
k
2
c
1
k
1
x
m
FIGURE E2.26
2.28 The vibrations of a system with stiffness k and
damping coefficient c is of the form x(t) X
o
sin vt.
This type of response, which is called a harmonic
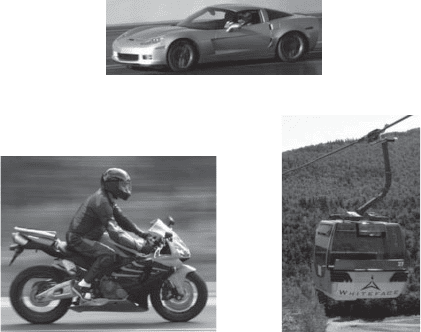
ber of degrees of freedom and the associated general-
ized coordinates in each case.
2.34 A vibratory system has a mass m 10 kg,
k 1500 N/m, and c 2500 N/(m/s). Given that
the displacement response has the form x(t)
0.2sin(9t) m, plot the graphs of , the spring force
kx, and the damper force versus time and discuss
them.
cx
#
mx
$
Exercises 67
(a)
(b)
(c)
FIGURE E2.33
(a) Car; (b) motorcycle; and (c) cable car. © iStockphoto.com/Jan
Paul Schrage; © iStockphoto.com/Anthony Collins; Kristiina Paul
68
Springs, masses, and dampers are used to model vibrations systems. In the motorcycle, the coil spring in parallel with a viscous
damper is attached to a mass composed of the tire and brake assembly. In the wind turbine, the mass of the propellers is supported
by the column, which acts as the spring. (Source: Cohen/Ostrow / Getty Images; PKS Media, Inc. / Getty Images.)
6969
3
Single Degree-of-Freedom Systems:
Governing Equations
3.1 INTRODUCTION
3.2 FORCE-BALANCE AND MOMENT-BALANCE METHODS
3.2.1 Force-Balance Methods
3.2.2 Moment-Balance Methods
3.3 NATURAL FREQUENCY AND DAMPING FACTOR
3.3.1 Natural Frequency
3.3.2 Damping Factor
3.4 GOVERNING EQUATIONS FOR DIFFERENT TYPES
OF DAMPING
3.5 GOVERNING EQUATIONS FOR DIFFERENT TYPES OF
APPLIED FORCES
3.5.1 System with Base Excitation
3.5.2 System with Unbalanced Rotating Mass
3.5.3 System with Added Mass Due to a Fluid
3.6 LAGRANGE’S EQUATIONS
3.7 SUMMARY
EXERCISES
3.1 INTRODUCTION
In this chapter, two approaches are illustrated for deriving the equation gov-
erning the motion of a single degree-of-freedom system. The momentum
principles of Chapter 1 form the basis of one approach, comprising force-
balance and moment-balance methods. The second approach is based on La-
grange’s equations, first introduced in this chapter and extensively used
throughout the remaining chapters. Based on the parameters that appear in the