Автор не указан. Физика: формулы и определения: Шпаргалка
Подождите немного. Документ загружается.

11.НЕРАВНОМЕРНОЕКРИВОЛИНЕЙНОЕ
ДВИЖЕНИЕ
Неравномерное криволинейное движение —
движение, при котором частица за равные
промежутки времени совершает неодинако-
вые перемещения, двигаясь криволинейно.
В случае неравномерного криволинейно-
го движения важно знать, как изменяется
скорость с течением времени. Векторной
величиной, характеризующей быстроту из-
менения скорости по модулю и направле-
нию, является ускорение.
Среднее ускорение неравномерного дви-
жения в интервале Dt — векторная величи-
на, равная отношению изменения скоро-
сти DV
к интервалу времени D t:
a
V
t
ср
=
∆
∆
.
Мгновенным ускорением МТ в момент
времени t будет предел среднего ускорения:
a
V
t
dV
dt
t
==
→
lim.
∆
∆
∆
0
Итак, мгновенное ускорение a
есть вектор
ная величина, равная пределу отношения эле
ментарного изменения скорости DV
к элемен
тарному промежутку времени Dt, или
dV
dt
—
производной от вектора скорости по времени.
12.РАВНОПЕРЕМЕННОЕДВИЖЕНИЕ
Равнопеременное прямолинейное движе-
ние — движение МТ, при котором скорость
ее за любые равные промежутки времени
увеличивается или уменьшается на одну и
ту же величину.
Равноускоренное движение — такое движе-
ние, при котором за любые равные проме-
жутки времени скорость возрастает на одну
и ту же величину.
Равнозамедленное движение — такое дви-
жение, при котором за любые равные про-
межутки времени скорость уменьшается на
одну и ту же величину.
Средняя скорость равноускоренного дви-
жения равна половине суммы начальной и
конечной скоростей:
V
VV
ср
=
+
0
2
.
Из формулы ускорения (см. вопр. 10) по-
лучим мгновенную скорость:
V = V
0
+ at.
График скорости равноускоренного дви-
жения — прямая линия, наклонная к оси
времени, начало которой соответствует на-
чальной скорости.
Путь равноускоренного движения:
∆SVt
VVtVVatt
Vatt
V
==
+
=
++
=
=
+
=
ср
()()
()
000
0
22
2
2
00
t
at
+
2
2
.
Уравнение равнопеременного движения:
S
VV
a
=
−
2
0
2
2
,
где S — путь.
13.СЛОЖЕНИЕУСКОРЕНИЙ
Неподвижные системы. При неравномер-
ном криволинейном движении МТ вектор
ее скорости изменяется как по модулю, так
и по направлению; имеют место ускорения
при изменении модуля скорости а
1
и ее на-
правления а
2
. Ускорение складывается по
правилу сложения векторов. Тогда резуль-
тирующее ускорение будет a
= a
1
+ a
2
.
Поступательно движущиеся системы. Рас-
смотрим случай, когда система Х′Y ′ переме-
щается поступательно с постоянным уско-
рением относительно системы ХY. В свою
очередь, в системе отсчета Х′Y ′ за промежу-
ток времени Dt = t
2
– t
1
скорость движения
тела изменилась от V
1
1
до V
1
2
. Скорость V
1
и
V
2
в моменты времени t
1
и t
2
в системе отсче-
та ХY, если скорость системы Х′Y ′, в свою
очередь, за это же время изменилась от V
01
до V
02
, можно найти по закону сложения
скоростей:
V
1
= V
01
+ V
1
1
; V
2
= V
02
+ V
1
2
.
Вычтем одно равенство из другого:
V
2
– V
1
= (V
02
– V
01
) + (V
1
2
– V
1
1
)
или
DV
= DV
0
+ DV
′.
Разделим обе части равенства на проме-
жуток времени Dt, в течение которого про-
изошло изменение скорости движения тела
на DV, получим:
∆
∆
∆
∆
∆
∆
V
t
V
t
V
t
=+
′
0
.
В пределе при Dt → 0 будем иметь
limlim lim
∆∆ ∆
∆
∆
∆
∆
∆
∆
rr r
V
t
V
t
V
t
→→ →
=+
′
00
0
0
или
dV
dt
dV
dt
dV
dt
=+
′
0
.
Окончательно:
a
= a
0
+ a
′,
где a
0
— ускорение системы Х ′Y ′, a
′ — ус-
корение частицы в системе Х′Y ′, a
— уско-
рение частицы в системе ХY.
Если система Х′Y ′ движется поступатель-
но с постоянной скоростью относительно
системы ХY, то a
0
= 0. Получим a
= a
′,
т.е. ускорение тела одно и то же в обеих
системах отсчета.

14.СВОБОДНОЕПАДЕНИЕТЕЛ
Сила тяжести — сила, с которой тела при-
тягиваются Землей.
Свободное падение тел (СП) — движение
тела под действием одной только силы тя-
жести, без учета сопротивления воздуха.
Ускорение СП. СП является равноускорен-
ным движением. Все тела независимо от
массы под действием силы тяжести падают с
одинаковым ускорением — ускорением СП,
модуль его обозначается буквой g. Ускоре-
ние СП в разных точках Земли несколько
различно и уменьшается с высотой. При
малых высотах и не очень точных измерени-
ях этой разницей можно пренебречь и счи-
тать g = 9,81 м/с
2
.
Скорость СП. Если в момент начала от-
счета времени t
0
= 0 тело имело скорость V
0
,
то по истечении времени t скорость тела
при СП вдоль оси OY (см. рис.) будет
V = V
0
+ gt. (1)
При начальной СП, равной нулю (V
0
= 0),
скорость тела в произвольный момент вре-
мени t будет
V = gt.
Путь при СП. В соответствии с формулой
пути равноускоренного движения путь Dh,
пройденный телом в СП, к моменту време-
ни t вдоль оси OY будет
∆hVt
gt
=+
0
2
2
.
Это
уравнение пути.
Уравнение движения при СП:
hh Vt
gt
=+ +
00
2
2
,
(2)
где h
0
— начальная координата частицы,
a h — конечная.
Решим совместно уравнения (1) и (2) при
h
0
= 0. Значит, Dh = h. Тогда получим
h
VV
g
=
−
2
0
2
2
,
где h — путь при СП, скорости V и V
0
—
проекции на ось OY.
y
h
A
B
∆h
h
0
V
�
0
V
�
g
�
0

15.МАССА.ПЛОТНОСТЬ
Масса — величина, равная отношению
силы к ускорению для различных тел ока-
зывается различным и является характе-
ристикой инертных свойств тела. Масса
является мерой инертности тела:
m
F
a
= .
Плотность вещества — это величина, из-
меряемая массой вещества в единице объ-
ема. Если масса тела m, а объем V, то плот-
ность тела
ρ=
m
V
кг/м
3
[].1
16.СИЛА.РАВНОДЕЙСТВУЮЩАЯ
Сила — это векторная величина, явля-
ющаяся мерой механического воздействия
на тело со стороны других тел или полей, в
результате которого тело приобретает уско-
рение или изменяет свою форму и размеры.
Сила — это мера взаимодействия тел или
частиц, из которых состоит тело.
Равнодействующая сила — результиру-
ющая сила, результат сложения всех сил,
действующих на тело. Равнодействующая
сила равна диагонали параллелограмма,
стороны которого являются слагаемыми
силами:
F
= F
1
+ F
2
.
При сложении нескольких сил
RF
i
i
n
=
=
∑
1
,
где R
— равнодействующая сила, n — кол-
во действующих сил.
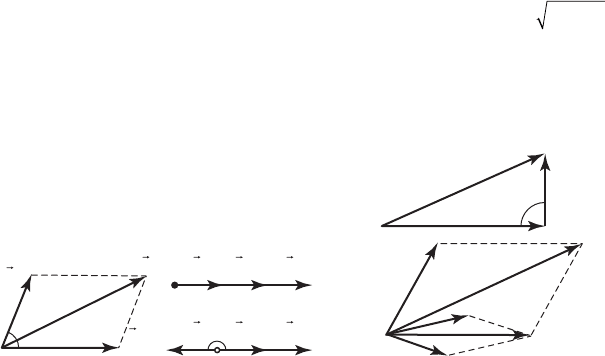
17.СЛОЖЕНИЕСИЛ
Сложение сил, направленных под углом друг к
другу (рис. 1). Сложение сил по правилу па-
раллелограмма — геометрическое сложение.
Геометрическая сумма зависит от модулей
слагаемых сил и угла между ними. Модуль
равнодействующей F
двух сил F
1
и F
2
, на-
правленных под произвольным углом α друг
к другу, определяется по теореме косинусов:
F
2
= F
1
2
+ F
2
2
+ 2F
1
F
2
cos α.
Сложение сил, действующих вдоль прямой
линии. Равнодействующая двух сил, на-
правленных вдоль одной прямой в одну
сторону и имеющих одинаковое направле-
ние (α = 0), равна по величине сумме моду-
лей составляющих сил и направлена в ту же
сторону (рис. 2).
Равнодействующая двух сил, направлен-
ных вдоль одной прямой в противоположных
направлениях (α = 180°), равна модулю раз-
ности численных значений слагаемых сил и
направлена в сторону большей силы (рис. 3).
18.СЛОЖЕНИЕСИЛ(ПРОДОЛЖЕНИЕ)
Сложение двух сил, направленных под пря-
мым углом. Равнодействующая двух сил,
направленных под прямым углом друг к
другу (α = 90°) согласно рис. 1, по модулю
определяется теоремой Пифагора: квадрат
гипотенузы равен сумме квадратов катетов:
F
2
= F
1
2
+ F
2
2
. Тогда
FFF=+
1
2
2
2
.
Сложение нескольких сил, больше двух,
можно производить по правилу параллело-
грамма (рис. 2). При этом в качестве одной из
слагаемых сил рассматривается полученная
перед этим равнодействующая сила
RF
i
i
n
=
=
∑
1
.
F
�
1
F
�
1
F
�
1
+ F
�
2
F
�
R
�
F
�
2
F
�
2
F
�
3
0
0
Рис. 1
Рис. 2
α
F
1
F
1
F
2
FF
0
Рис. 2
F
1
F
2
F
2
F
0
0
Рис. 3Рис. 1
α
α
19.ПЕРВЫЙЗАКОННЬЮТОНА
(ЗАКОНИНЕРЦИИ)
Первый закон Ньютона: всякое тело сохра
няет состояние покоя или равномерного и
прямолинейного движения до тех пор, пока
на него не действует сила или действие всех
сил скомпенсировано. Закон записывается в
виде формулы:
F
i
i
n
=
∑
=
1
0,
где S — знак суммы, a n — кол-во действу-
ющих сил.
Инерция — св-во тел сохранять состояние
покоя или равномерного прямолинейного
движения. Первый закон Ньютона называ-
ют также законом инерции.
Инерциальные системы — системы отсче-
та, в которых выполняется первый закон
Ньютона. Система отсчета, в которой он не
выполняется, называется неинерциальной
системой отсчета.
Инертность — св-во тел получать различ-
ные ускорения при действии на них одина-
ковой по величине и направлению силы.
Чем больше ускорение получает тело, тем
меньше его инертность, и наоборот.
20.ВТОРОЙЗАКОННЬЮТОНА
Второй закон Ньютона: ускорение — век
торная величина, поэтому сила должна быть
векторной величиной. Можно записать:
Fma==⋅=
⋅
1Н кг 1м/с
кг м
с
.
2
2
11
Ускорение прямо пропорционально силе,
действующей на тело, и обратно пропорци-
онально массе тела:
a
F
m
= .
Если на тело действует несколько сил, то
ma F
i
i
n
=
=
∑
1
,
где знак S выражает сумму, a n — кол-во
действующих сил.

21.ТРЕТИЙЗАКОННЬЮТОНА
Опыт показывает, что при любом взаимо-
действии двух тел, массы которых равны m
1
и m
2
, отношение модулей их ускорений ос-
тается постоянным и равным обратному
отношению масс тел:
a
a
m
m
am am
1
2
2
1
11 22
==или.
Векторный вид этого уравнения: m
1
a
0
=
= –m
2
a
2
. Знак «минус» выражает тот опыт-
ный факт, что при взаимодействии тел их
ускорения всегда имеют противоположные
направления.
Исходя из второго закона Ньютона, полу-
чаем равенство
F
1
= –F
2
.
Это выражение называется третьим зако-
ном Ньютона: силы, с которыми две МТ
действуют друг на друга, всегда равны по
величине и направлены в противоположные
стороны вдоль прямой, соединяющей эти
точки, т.е. F
1.2
= –F
2.1
, где F
1.2
— сила дей-
ствия частицы т
2
на частицу m
1
, a F
2.1
—
сила действия частицы m
1
на частицу m
2
.
22.СКОРОСТЬПРИДВИЖЕНИИ
ПООКРУЖНОСТИ
Период Т — это время, в течение которого
частица совершает один оборот, двигаясь
по окружности. Частота n — это количество
оборотов, совершаемых частицей в едини-
цу времени при движении по окружности.
Скорость, с которой частица движется по
окружности, — линейная скорость.
Если частица при равномерном движе-
нии по окружности за время, равное пери-
оду t = T, делает один оборот, то она прохо-
дит путь, равный длине окружности S = 2pr,
поэтому модуль линейной скорости будет
V
r
T
T==
21π
ν
,.
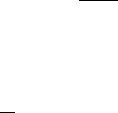
23.ДВИЖЕНИЕПООКРУЖНОСТИ:
УГЛОВОЙПУТЬ,УГЛОВАЯСКОРОСТЬ
Угловой путь. Проведем радиус-вектор r
, со-
единяющий центр окружности с МТ А, дви-
жущейся по окружности. Укажем углом j
0
,
отсчитывая от оси ОХ до радиус-вектора r
против часовой стрелки, начальное положе-
ние, а углом j — конечное положение час-
тицы (см. рис.). Изменение положения час-
тицы по окружности может быть охарактери-
зовано изменением ее угловой координаты
Dj = j – j
0
, где Dj — угол поворота радиус-
вектора частицы — угловой путь.
A A
x
0
ϕ
ϕ
0
Δϕ
r
ω
Угол поворота можно выражать в градусах.
В СИ за единицу угла принят радиан (рад) —
угол между двумя радиусами окружности,
длина дуги между которыми равна радиусу.
2πr
T
= 2p рад, 2p рад = 360°.
Угловая скорость w измеряется углом пово-
рота радиус-вектора (угловым путем) в еди-
ницу времени, т.е. отношением углового пути
Dj к промежутку времени Dt, за который
этот путь пройден; угловая скорость равна:
ω
ϕ
ϕϕ
==
−
−
∆
∆ttt
0
0
.
Если частица при равномерном враще-
нии совершает полный оборот по окруж-
ности, то численная величина угловой
скорости принимает вид
ω
π
πν==
2
2
T
.
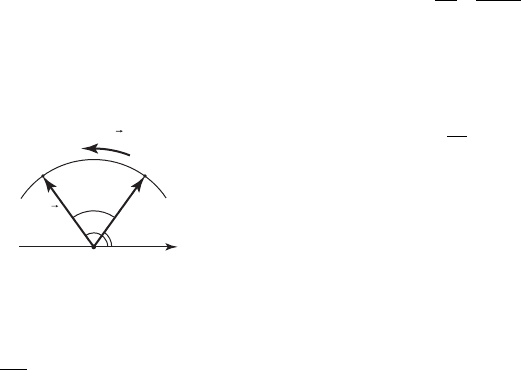
24.УСКОРЕНИЕПРИДВИЖЕНИИ
ПООКРУЖНОСТИ
Линейная скорость равна угловой скоро-
сти, умноженной на радиус: V = w r. По-
скольку направление вектора линейной
скорости V
изменяется, то существует ус-
корение. Определим это ускорение.
За малый промежуток времени Dt МТ А
проходит небольшой путь D S, равный дуге
центрального угла Dj (см. рис.). При этом
скорость V
получит приращение DV
, что
вызывает изменение ее направления на
угол Dj. При равномерном движении час-
тицы приращения скорости за равные про-
межутки времени будут постоянными, тог-
да ускорение равно:
a
V
t
VV
Vt
r
===
∆
∆
∆∆
∆
,.ϕ
2
A
A
0
∆ϕ
∆ϕ
r
�
r
�
V
�
V
�
V
�
∆V
�
∆S
25.ЦЕНТРОСТРЕМИТЕЛЬНАЯСИЛА
При равномерном движении частицы по
окружности возникает центростремитель-
ное ускорение:
a
V
R
Rr
ц.с
== =
2
222
4ωπν .
На основании второго закона Ньютона
соответствующая центростремительная
сила будет равна
Fma
mV
R
mRmr
ц.сц.с
====
2
222
4ωπν .
Центростремительная сила удерживает
движущееся тело на окружности, приложе-
на к этому телу и направлена по радиусу к
центру окружности. Эта сила — результат
воздействия удерживающего тела на вра-
щающееся тело.