ASM Metals HandBook Vol. 17 - Nondestructive Evaluation and Quality Control
Подождите немного. Документ загружается.

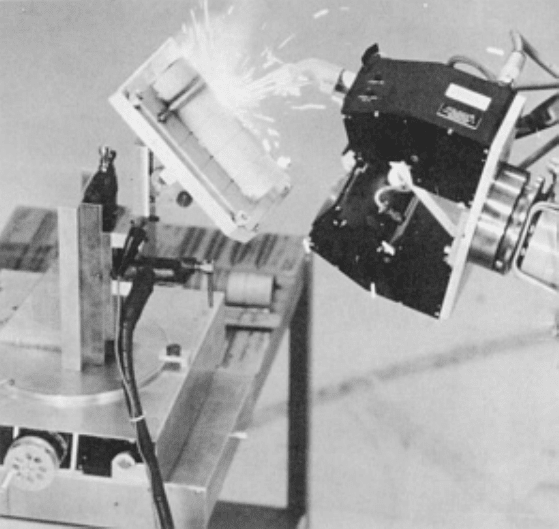
Fig. 19 Adaptive robotic arc welding of automotive bodies using a three-
dimensional vision system for seam
tracking and measurement of seam width depth. Both the vision module and the metal-
inert gas welding gun
are attached to the tool mounting plate located on the robot's wrist. Courtesy of Robotic Vision Systems, Inc.
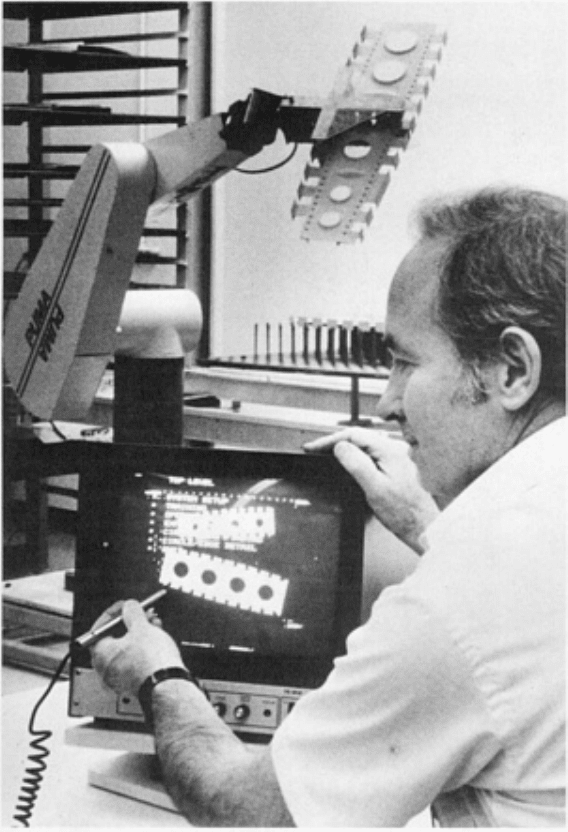
Fig. 20 Robot
gripper arm used to maneuver and orient an aluminum aircraft section with the aid of a video
camera that helps it see the workpiece and then identifies it from a data base. Courtesy of Lockheed-
California
Company
Additional Applications
As machine vision technology evolves and becomes more widely used within industry, additional applications are
beginning to emerge. Many of these applications represent special-purpose equipment that has been designed to satisfy a
particular need, while others combine two or more of the previously mentioned functions (visual inspection, part
identification, and guidance and control). For example, the system shown in Fig. 21 can inspect as well as sort various
fasteners and similar multiple-diameter parts. Still other applications reflect machine vision systems that are incorporated
into other equipment.
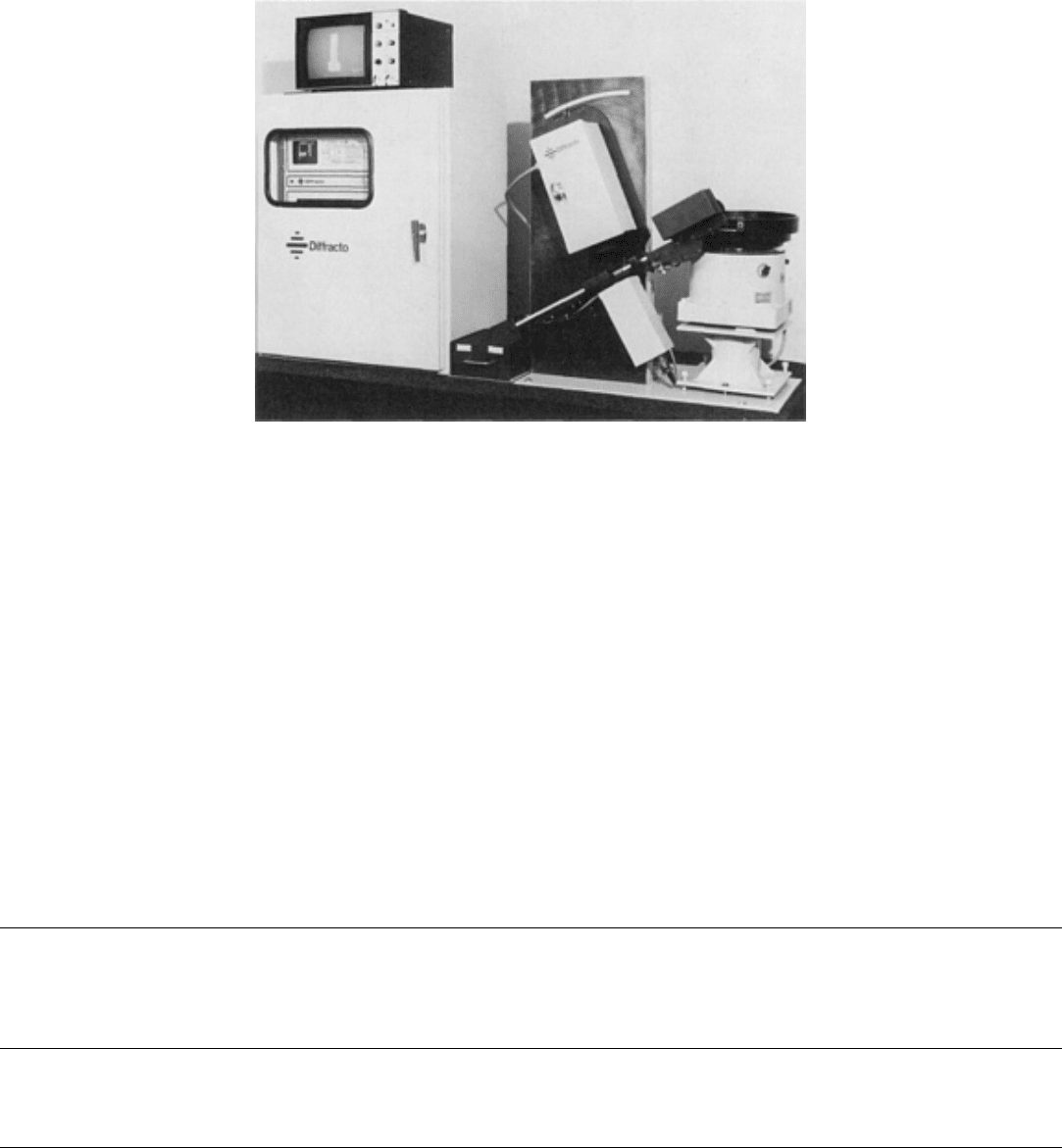
Fig. 21 Noncontact digital computer-vision-
based fastener inspection system used to gage and then sort parts.
Unit measures 11 parameters for up to 24 different fas
teners that are stored in a memory and is capable of
sorting up to 180 parts per minute or over 10,000 parts per hour. Courtesy of Diffracto Limited
Special-Purpose Systems. In the future, special-purpose systems are likely to represent a large, if not the largest, use
of machine vision technology. One of the best examples of this type of system is equipment for inspecting PCBs. A
number of companies have either developed or are in the process of developing such systems, which are expected to be
widely used by the end of the decade. Similar special-purpose equipment is entering the market for the inspection of
thick-film substrates and circuits, surface-mounted devices, and photolithographic artwork.
Embedded Technology. In the embedded technology are, one of the major uses of machine vision is mask alignment
for the production of microelectronic devices. Similarly, vision technology is also becoming widely used for controlling
other microelectronic fabrication equipment, such as the automation of wire-bonding machines for connecting integrated
circuits to their case. In the future, these two thrusts--special-purpose systems and embedded vision technology--should
result in numerous applications unheard of today.
Reference cited in this section
1.
"Machine Vision Systems: A Summary and forecast," 2nd ed., Tech Tran Consultants, Inc., 1985
Machine Vision and Robotic Inspection Systems
John D. Meyer, Tech Tran Consultants, Inc.
Future Outlook
The potential for using machine vision in manufacturing applications is enormous. Many inspection operations that are
now performed manually could be automated by machine vision, resulting in both reduced costs and improved product
quality. However, before machine vision can reach its full potential, several basic improvements in the technology must
be made.
Limitations of Current Systems
At the present time, there are six key issues that must be addressed by vision system developers. Many organizations are
attempting to resolve these issues through such developments as improved computer hardware or improved software
algorithms, but much work remains to be done to develop effective vision systems that are available at a reasonable cost.
The following issues represent basic limitations of commercial vision systems:
• Limited 3-D interpretation
• Limited interpretation of surfaces
• Need for structured environment
• Long processing time
• High cost
• Excessive applications engineering
Limited 3-D Interpretation. Most commercial vision systems are two dimensional; that is, they make conclusions
about objects from data that are essentially two-dimensional in nature. In many manufacturing situations, an outline of the
shape of an object is sufficient to identify it or to determine whether an inspection standard has been achieved. However,
in many other operations, such as the inspection of castings, this information is not sufficient. Many more sophisticated
operations could be performed with vision systems if the three-dimensional shape of an object could be inferred from an
image or a series of images. To accomplish this, vision system suppliers will need to incorporate more sophisticated data
interpretation algorithms along with improved system performance (resolution, speed, and discrimination).
Limited Interpretation of Surfaces. Complex surface configurations on objects, such as textures, shadows, and
overlapping parts, are difficult for vision systems to interpret. Improved gray-scale image formation capabilities have
helped somewhat, but vision systems are extremely limited in their ability to analyze the large amounts of data provided
by gray-scale image formation. The ability to accurately interpret light intensity variations over the surface of an object,
which is so fundamental to human vision, must be refined if vision systems are to be used for such applications as object
recognition or inspection from surface characteristics.
Need for Structured Environment. Although vision systems, being a form of flexible automation, should be able to
eliminate the need for elaborate jigs and fixtures, they still require a relatively orderly environment in most current
applications. Vision systems have difficulty dealing with overlapping or touching parts; therefore, workpieces must be
presented one at a time to the system. Ideally, a vision system should be able to examine parts as humans do--by studying
key features no matter how the part is oriented and even if some portions of the parts are obstructed by other overlapping
parts.
Long Processing Time. There are constraints on the speed of the manufacturing operation in which a vision system
can be used. Only a limited number of real-time (30 images per second) systems have begun to appear on the market.
However, most real-time systems are used for simple applications rather than more complex tasks. There is generally a
trade-off between the processing time required and the degree of complexity of a processing cycle. An ideal vision system
would be capable of performing complex three-dimensional analyses of objects, including surface features, in real time.
High Cost. Although payback periods for vision systems are generally good (1 year or less for some applications), the
basic purchase price of many systems is still prohibitively high to promote widespread use of this technology within the
manufacturing industry.
Extensive Applications Engineering. It is still nearly impossible to purchase an off-the-shelf vision system and
apply it without considerable assistance from a vendor, consultant, or in-house engineering staff. This is partly due to the
complexity of real-world applications. Other factors include the limitations of current equipment and the lack of trained
personnel within user organizations. Application engineering cost and risk and a shortage of trained technical personnel
are major barriers to widespread use of industrial vision systems.
Future Developments
Many developmental programs are underway, both in private industry as well as in universities and other research
organizations, to develop advanced vision systems that are not subject to the limitations discussed previously.
The solution to these problems is likely to emerge from several important developments expected to occur during the next
decade; these developments are discussed in the following sections. However even if no further improvements are made
in machine vision systems, the number of systems in use would continue to grow rapidly. Machine vision systems are
beginning to be introduced into applications for which they previously would have not even been considered, because of
the complexity of the manufacturing process.
Improved Camera Resolution. As solid-state cameras with arrays of 512 × 512 or even 1024 × 1024 pixels are used,
image resolution will improve. As a result, the ability of vision systems to sense small features on the surfaces of objects
should also improve.
Ability to Sense Color. A few developmental vision systems are already available that sense color. The addition of
this capability to commercial vision systems would allow the measurement of one more feature in identifying objects. It
would also provide a greater degree of discrimination in analyzing surfaces.
Effective Range Sensing. This is a prerequisite for three-dimensional interpretation and for certain types of robot
vision. Based on research such as that being performed on binocular vision, it is likely that a range-sensing capability will
become a standard feature of commercial vision systems within a few years.
Ability to Detect Overlap. This capability will approve the ability of vision systems to interpret surfaces and three-
dimensional objects. It will also provide a greater degree of flexibility for vision systems. There will no longer be a need
to ensure that moving parts on a conveyor are not touching or overlapping, and this will reduce the amount of structure
required.
Improved Gray-Scale Algorithms. As vision system hardware becomes capable of forming more complex images,
the software algorithms for interpreting these images will improve, including the ability to infer shape from changes in
light intensity over an image.
Robot Wrist-Mounted Vision System. Based on work being performed at a number of organizations, it is likely that
an effective wrist-mounted vision system will be available within the next few years. Mounting the camera on the robot's
wrist provides the advantage of greatly reducing the degree of structure required during such operations as robot-
controlled welding, assembly, or processing.
Motion-Sensing Capability. There are two elements being developed in this area. First is the ability of a vision
system to create and analyze an image of a moving object. This requires the ability to freeze each frame without blurring
for analysis by the computer. Second is the more complex problem of determining the direction of motion of an object
and even the magnitude of the velocity. This capability will be valuable in such applications as collision avoidance or
tracking moving parts.
Parallel Processing of Whole Image. One of the most promising methods of approaching a real-time processing
capability is the use of a parallel processing architecture. Several systems currently on the market offer this type of
architecture. This approach is likely to be used more extensively in the future.
Standardized Software Algorithms. Although some standard vision system application algorithms are available,
most programs for current manufacturing applications are custom designed. It is likely that standard programs will
become increasingly available for standard application. In addition, programming languages will continue to become
more user oriented.
Computers Developed Specifically for Vision Systems. Most vision systems today use standard off-the-shelf
computers, which tends to limit the data analysis capabilities of the vision system, In the future, especially as sales
volumes increase, it is likely that computers will be designed specifically for dedicated use with a vision system. This will
reduce processing times and help to reduce system prices. Several systems have been developed with this type of custom
computer architecture.
Hard-Wired Vision Systems. To overcome the problem of processing speed, some researchers have suggested the
use of hard-wired circuitry rather than microprocessor-based systems. This would significantly speed up image processing
times, but may result in less system flexibility and limited capabilities.
Special-Purpose Systems. As discussed previously, there is a growing trend toward special-purpose, rather than
general-purpose, vision systems. This permits the system developer to take advantage of prior knowledge concerning the
application and to provide only the features and capabilities required, resulting in more cost-effective systems. A number
of vendors have already begun to offer special-purpose systems for such applications as weld seam tracking, robot vision,
and PCB inspection.
Integration with Other Systems. One of the major problems with the current vision systems is the difficulty in
interfacing them with other types of equipment and systems. A number of companies and research organizations are
attacking this problem, particularly with respect to special-purpose vision systems.
Optical Computing. It is possible to perform image processing using purely optical techniques, as opposed to the
traditional approach of converting an image into an electrical signal and analyzing this symbolic representation of the
image. In the optical domain, processing steps such as the computation of Fourier transforms take place almost
instantaneously. Although optical computing techniques offer considerable promise, it will take a number of years before
they become a practical reality.
Custom Microelectronic Devices. As the sales volume for vision systems continues to grow, it will become
increasingly feasible to implement portions of the system design in custom microelectronic circuits. This will be
particularly true for low-level image-processing functions, such as histogram calculations, convolutions, and edge
detectors. Such chips should be available within the next few years.
Innovative Sensor Configurations. A number of researchers are working on unique vision sensors to improve
overall performance. This includes novel sensor configurations, such as annular arrangements of detector elements, as
well as other camera concepts, such as multiple spectral detectors that sense energy in more than one portion of the
electromagnetic spectrum.
Visual Servoing. Several researchers are studying the use of vision systems as an integral feedback component in a
motion control system, such as a robot vision system for positioning the manipulator arm. Although vision systems are
currently used for robot guidance and control, this is usually accomplished outside the control loop. In visual servoing, on
the other hand, the vision system would serve as a position-sensing device or error measurement component on a real-
time basis.
Machine Vision and Robotic Inspection Systems
John D. Meyer, Tech Tran Consultants, Inc.
References
1. "Machine Vision Systems: A Summary and forecast," 2nd ed., Tech Tran Consultants, Inc., 1985
2. P. Dunbar, Machine Vision, Byte, Jan 1986
Machine Vision and Robotic Inspection Systems
John D. Meyer, Tech Tran Consultants, Inc.
Selected References
• I. Aleksander, Artificial Vision for Robots, Chapman and Hall, 1983
• D. Ballard and C. Brown, Computer Visions, Prentice-Hall, 1982
• J. Brady, Computer Vision, North-Holland 1982
• O. Faugeras, Fundamentals of Computer Vision, Cambridge University Press, 1983
• J. Hollingum, Machine Vision: Eyes of Automation, Springer-Verlag, 1984
• A. Pugh, Robot Vision, Springer-Verlag, 1983
Guide to Nondestructive Evaluation Techniques
John D. Wood, Lehigh University
Introduction
NONDESTRUCTIVE EVALUATION (NDE) comprises many terms used to describe various activities within the field.
Some of these terms are nondestructive testing (NDT), nondestructive inspection (NDI), and nondestructive examination
(which has been called NDE, but should probably be called NDEx). These activities include testing, inspection, and
examination, which are similar in that they primarily involve looking at (or through) or measuring something about an
object to determine some characteristic of the object or to determine whether the object contains irregularities,
discontinuities, or flaws.
The terms irregularity, discontinuity, and flaw can be used interchangeably to mean something that is questionable in the
part or assembly, but specifications, codes, and local usage can result in different definitions for these terms. Because
these terms all describe what is being sought through testing, inspection, or examination, the term NDE (nondestructive
evaluation) has come to include all the activities of NDT, NDI, and NDEx used to find, locate, size, or determine
something about the object or flaws and allow the investigator to decide whether or not the object or flaws are acceptable.
A flaw that has been evaluated as rejectable is usually termed a defect.
Guide to Nondestructive Evaluation Techniques
John D. Wood, Lehigh University
Selection of NDE Methods
The selection of a useful NDE method or a combination of NDE methods first necessitates a clear understanding of the
problem to be solved. It is then necessary to single out from the various possibilities those NDE methods that are suitable
for further consideration; this is done by reviewing the articles in this Volume and in the technical literature.
Several different ways of comparing the selected NDE methods are presented in this article, but there is no completely
acceptable system of comparison, because the results are highly dependent on the application. Therefore, it is
recommended that a comparison be developed specifically for each NDE area and application. The final validation of any
NDE protocol will depend on acceptance tests conducted using appropriate calibration standards.
Nondestructive evaluation can be conveniently divided into nine distinct areas:
• Flaw detection and evaluation
• Leak detection and evaluation
• Metrology (measurement of dimension) and evaluation
• Location determination and evaluation
• Structure or microstructure characterization
• Estimation of mechanical and physical properties
• Stress (strain) and dynamic response determination
• Signature analysis
• Chemical composition determination
Because two of these areas--signature analysis and chemical composition determination--are usually not considered when
NDE applications are discussed and are therefore not covered in this Volume, they will not be discussed further.
Information on these subjects can, however, be found in Materials Characterization, Volume 10 of ASM Handbook,
formerly 9th Edition Metals Handbook. The remaining seven areas are vastly different and therefore will be covered
separately, along with a discussion of the selection of specific NDE methods
*
for each.
Note cited in this section
*
Throughout this article the term method is used to describe the various nondestructive testing disciplines
(for example, ultrasonic testing) within which variou
s test techniques may exist (for example, immersion or
contact ultrasonic testing).
Guide to Nondestructive Evaluation Techniques
John D. Wood, Lehigh University
Flaw Detection and Evaluation
Flaw detection is usually considered the most important aspect of NDE. There are many conceivable approaches to
selecting NDE methods. One approach is to consider that there are only six primary factors involved in selecting an NDE
method(s):
• The reason(s) for performing the NDE
• The type(s) of flaws of interest in the object
• The size and orientation of flaw that is rejectable
• The anticipated location of the flaws of interest in the object
• The size and shape of the object
• The characteristics of the material to be evaluated
The most important question to be answered before an NDE method can be selected is, What is the reason(s) for choosing
an NDE procedure? There are a number of possible reasons, such as:
• Determining whether an object is acceptable after each fabrication step; this can be called in-
process
NDE or in-process inspection
•
Determining whether an object is acceptable for final use; this can be called final NDE or final
inspection
•
Determining whether an existing object already in use is acceptable for continued use; this can be called
in-service NDE or in-service inspection
After the reasons for selecting NDE have been established, one must specify which types of flaws are rejectable, the size
and orientation of flaws that are rejectable, and the locations of flaws that can cause the object to become rejectable. The
type, size, orientation, and location of flaws that will cause a rejection must be determined if possible, using stress
analysis and/or fracture mechanics calculations. If definitive calculations are not economically feasible, the type, size, and
orientation of flaw that will cause the object to be rejected must be estimated with an appropriate safety factor.
The type, size, orientation, and location of the rejectable flaw are often dictated by a code, standard, or requirement, such
as the American Society of Mechanical Engineers Pressure Vessel Code, a Nuclear Regulatory Commission requirement,
or the American Welding Society Structural Welding Code. If one of these applies to the object under consideration, the
information needed will be available in the appropriate document.
Volumetric and Planar Flaws. Once the size and orientation of the rejectable flaw have been established, it is
necessary to determine which types of flaws are rejectable. In general, there are two types of flaws: volumetric and
planar. Volumetric flaws can be described by three dimensions or a volume. Table 1 lists some of the various types of
volumetric flaws, along with useful NDE detection methods. Planar flaws are thin in one dimension but larger in the other
two dimensions. Table 2 lists some of the various types of planar flaws, along with appropriate NDE detection methods.
Table 1 Volumetric flaw classification and NDE detection methods
Volumetric flaws
Porosity
Inclusions
Slag
Tungsten
Other
Shrinkage
Holes and voids
Corrosion thinning
Corrosion pitting
NDE detection methods
Visual (surface)
Replica (surface)
Liquid penetrant (surface)
Magnetic particle (surface and subsurface)
Eddy current
Microwave
Ultrasonic
Radiography
X-ray computed tomography
Neutron radiography
Thermography
Optical holography
Speckle metrology
Digital image enhancement (surface)
Table 2 Planar flaw classification and NDE detection methods
Planar flaws
Seams
Lamination
Lack of bonding
Forging or rolling lap
Casting cold shut
Heat treatment cracks
Grinding cracks
Plating cracks
Fatigue cracks
Stress-corrosion cracks
Welding cracks
Lack of fusion
Incomplete penetration
Brazing debond
NDE detection methods
Visual
Replication microscopy
Magnetic particle
Magnetic field
Eddy current
Microwave
Electric current perturbation
Magabsorption
Ultrasonic
Acoustic emission
Thermography
Flaw Location, Shape, and Size. In addition to classifying flaws as volumetric or planar, it is necessary to consider
the locations of the flaws in the object. Flaws can be conveniently classified as surface flaws or as interior flaws that do
not intercept the surface. Table 3 lists NDE methods used to detect surface and interior flaws.
Table 3 NDE methods for the detection of surface and interior flaws
Surface
Visual
Replica
Liquid penetrant
Magnetic particle
Magnetic field
Electric current
Magabsorption
Eddy current
Ultrasonic
Acoustic emission
Thermography
Optical holography
Speckle metrology
Acoustic holography
Digital image enhancement
Acoustic microscopy
Interior
Magnetic particle (limited use)
Magnetic field
Electric current perturbation
Magabsorption
Eddy current
Microwave
Ultrasonic
Acoustic emission
Radiography
X-ray computed tomography
Neutron radiography
Thermography (possible)
Optical holography (possible)
Acoustic holography (possible)
Two additional factors that affect NDE method selection are the shape and size of the object to be evaluated. Tables 4 and
5 compare NDE techniques for varying size (thickness) and shape.
Table 4 Comparison of NDE methods based on size of object to be evaluated
The thickness or dimension limitation is only approximate because the exact value depends on the specific physical properties of the
material being evaluated.