Артамонов Д.В., Семенов А.Д. Основы теории линейных систем
Подождите немного. Документ загружается.

131
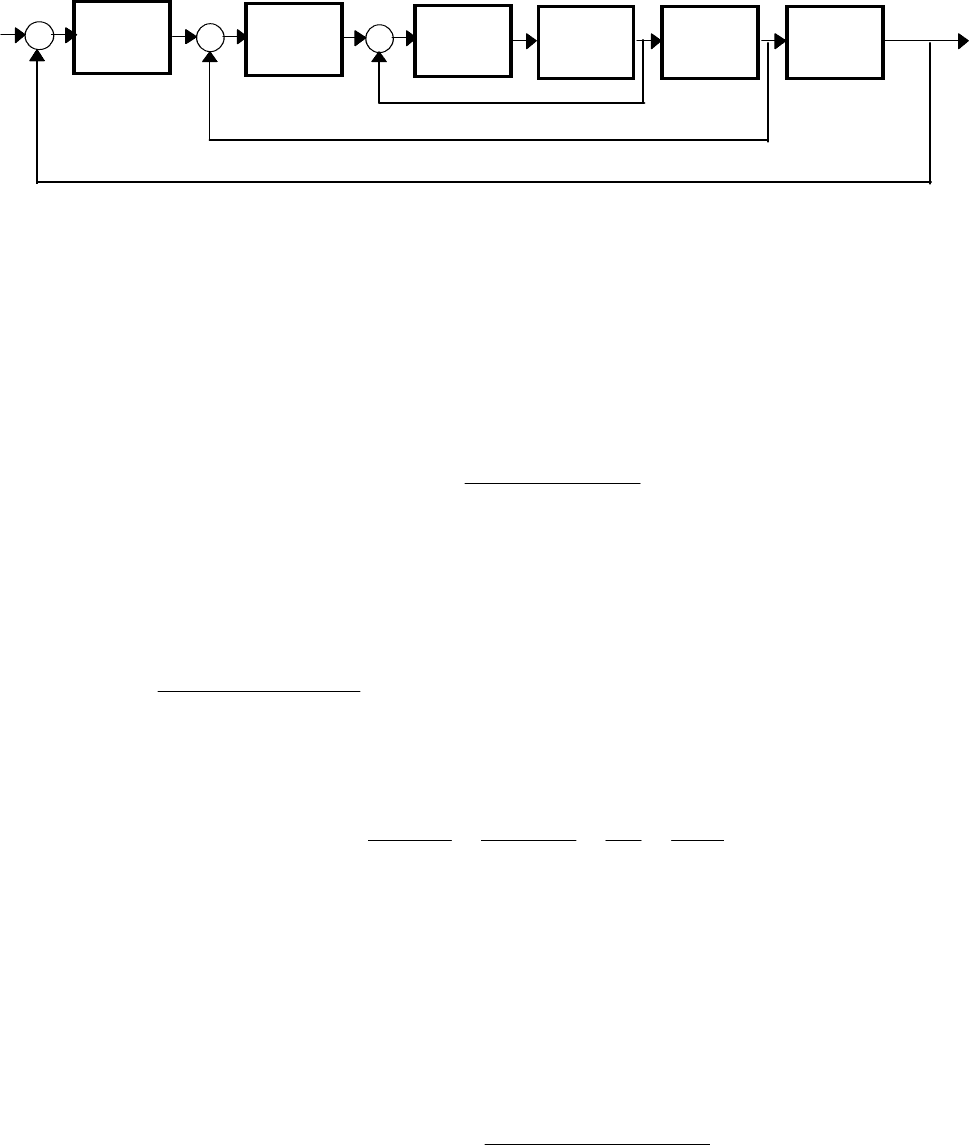
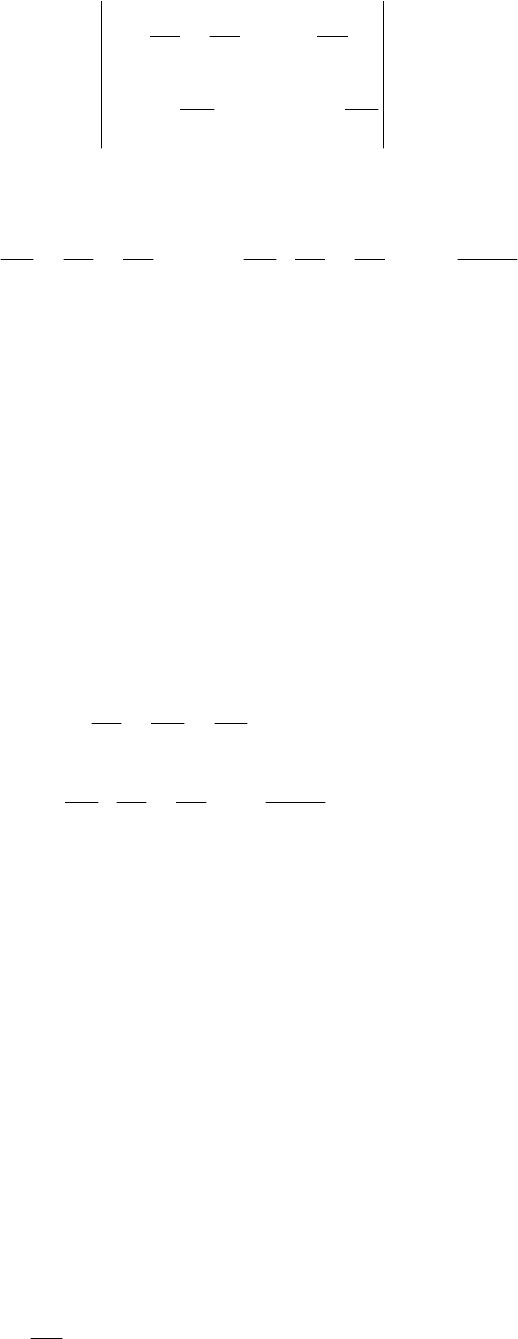
Введем вспомогательные контуры регулирования внутренних координат та-
ким образом, чтобы в каждом контуре оказалась только одна компенсируемая по-
стоянная времени, как показано на рис. 5.3.
x
з3
x
з2
x
з1
u
x
1
x
2
x
3
W
p3
(p) W
p2
(p) W
p1
(p) W
1
(p) W
2
(p) W
3
(p)
- - -
Рис. 5.3
Проведем вначале синтез внутреннего контура регулирования для перемен-
ной X
1
.
Для первого контура желаемая передаточная функция разомкнутого конту-
ра в соответствии с (5.35) будет выглядеть:
)1(
1
)(
1
11
+
=
pTpTa
pW
μμ
. (5.39)
Передаточную функцию регулятора найдем из условия
)()(
1111
pWWpW
pp
=
, (5.40)
где
)1)(1(
)(
1
1
1
++
=
pTpT
k
pW
p
μ
передаточная функция первого звена объекта рис.
5.2.. Тогда
pTT
T
pTak
pT
pW
pW
pW
uup
p
11
1
11
1
1
11
1
1
1
)(
)(
)(
+=
+
==
μ
. (5.41)
В результате синтеза получен ПИ - регулятор с постоянной интегрирования
TkaT
u111
=
μ
.
На основании (5.39) и (5.41) с учетом (5.36) найдем передаточную функцию
замкнутой системы
Wp
aT pT p
z1
1
1
11
()
()
=
++
μμ
. (5.42)
132
Если выбрать
a
1
таким образом, чтобы внутренний контур представлял со-
бой высокодемпфированное звено с невысоким показателем колебательности, то
выражение (5.41) можно упростить, пренебрегая членами второго порядка мало-
сти
Wp
aT p
z1
1
1
1
()
≈
+
μ
. (5.43)
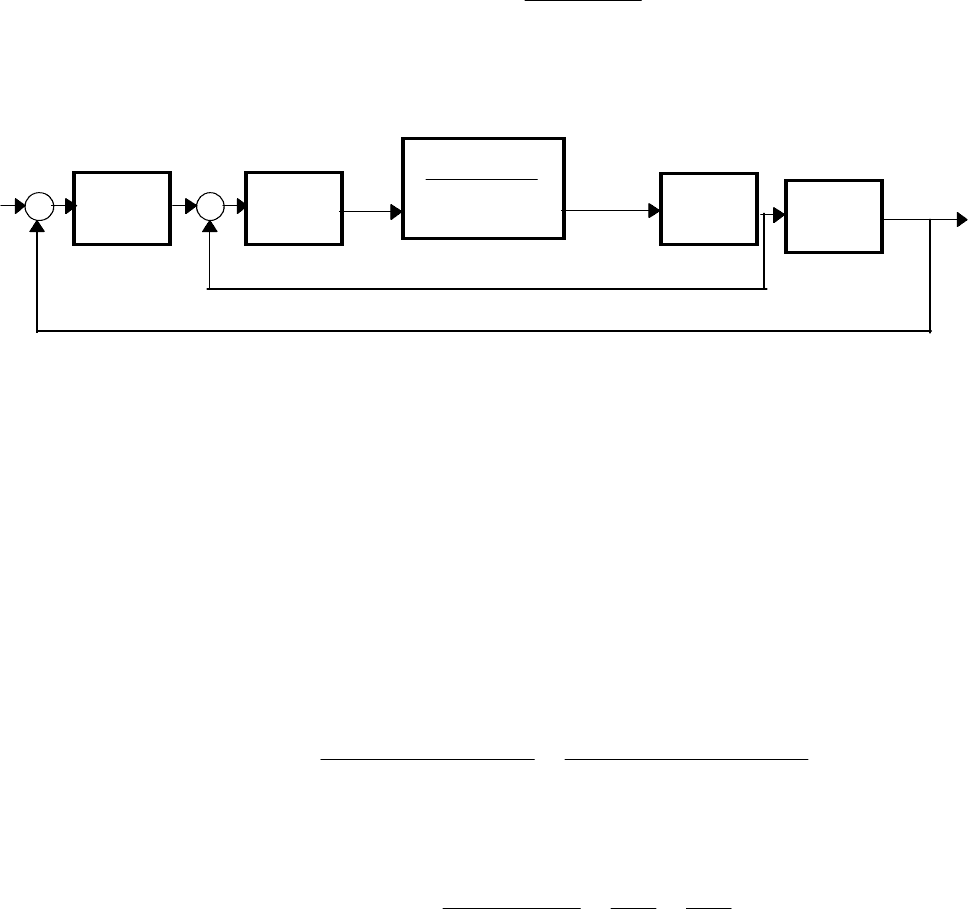
С учетом этого допущения структурная схема рис. 5.3 преобразуется к виду
x
з3
x
з2
x
з1
x
1
x
2
x
3
W
p3
(p) W
p2
(p)
1
1
1
aT p
μ
+
W
2
(p) W
3
(p)
- -
Рис. 5.4.
В результате введения первого контура регулирования из второго контура
исключена большая постоянная
T
1
, а не компенсируемая постоянная времени
принимает значение
TaT
μμ
21
= , т. е. увеличивается в a
1
раз.
Проводя синтез второго контура регулирования можно записать выражения
передаточных функций.
Желаемая передаточная функция разомкнутого второго контура
Wp
aT pT p aaTpaTp
21
22 2 12 1
1
1
1
1
()
() ( )
=
+
=
+
μμ μ μ
. (5.44)
Передаточная функция регулятора
Wp
Tp
kaaTp
T
TT
p
uu
2
2
212
2
22
1
1
()
=
+
=+
μ
, (5.45)
где
TkaaT
u2212
=
μ
.
Вновь получена передаточная функция ПИ - регулятора.
Передаточная функция замкнутого второго контура
133
Wp
aa T paT p aa T p
z2
12 1 12
1
11
1
1
()
()
=
++
≈
+
μμ μ
. (5.46)
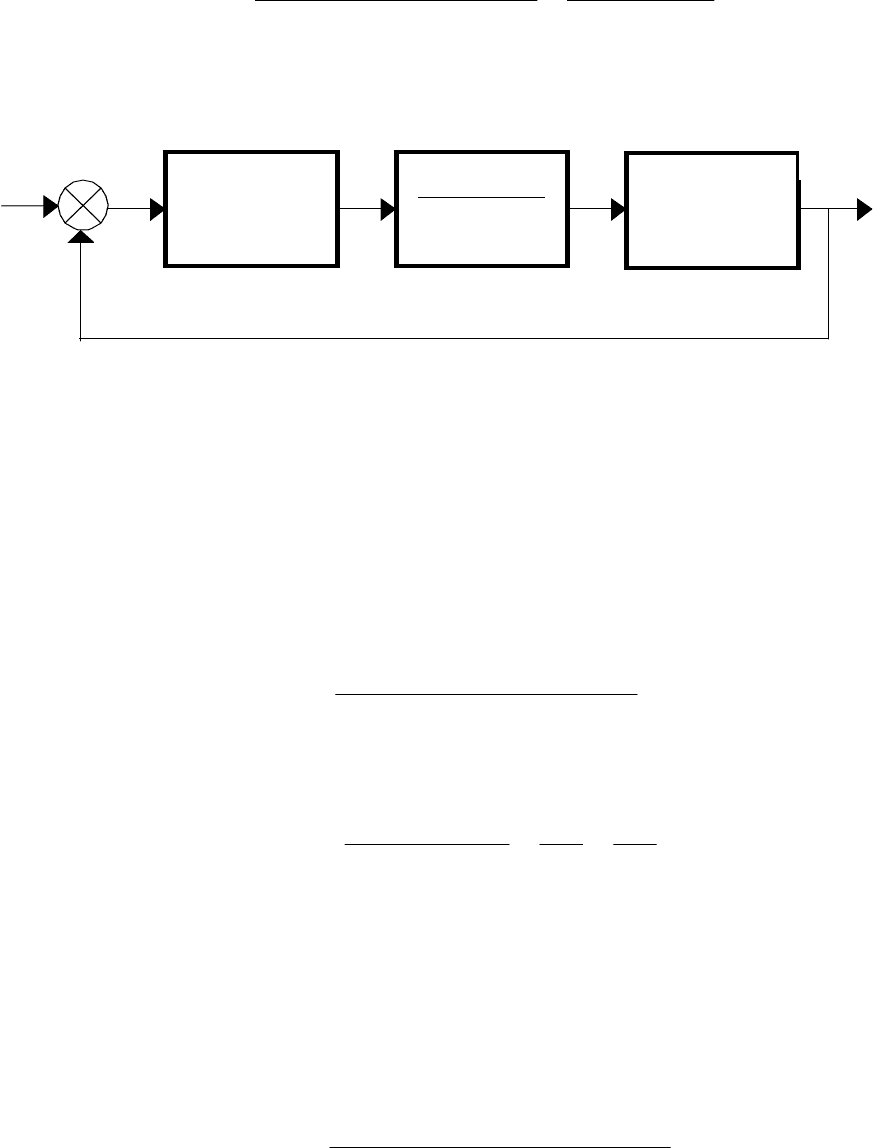
Структурная схема преобразуется к виду рис. 5.4.
1
1
21
+pTaa
μ
W
p3
(p)
W
3
(p)
_
x
з3
x
3
Рис. 5.5.
Сравнивая рис. 5.2 с рис. 5.5, можно установить, что в результате введения
двух контуров регулирования, исключено влияние на динамику системы больших
постоянных времени
TT
12
,. Вместе с тем увеличилась суммарная не компенси-
руемая постоянная контура, оценка которой составляет
TaaT
μμ
312
= . Желаемая
передаточная функция разомкнутой системы при этом запишется в виде
Wp
aa aT paa T p
21
123 12
1
1
()
()
=
+
μμ
. (5.47)
Передаточная функция регулятора третьего контура
Wp
Tp
kaaaTp
T
TT
p
uu
2
3
312 3
3
33
1
1
()
=
+
=+
μ
, (5.48)
где
TkaaaT
u33123
=
μ
- постоянная времени ПИ - регулятора.
С учетом принятых допущений передаточная функция замкнутого внешнего
контура регулирования приближенно соответствует колебательному звену с пере-
даточной функцией
Wp
aa aT paa T p
z3
123 12
1
11
()
()
=
++
μμ
. (5.49)
Введение вспомогательных, внутренних контуров регулирования имеет це-
лью формирование благоприятной передаточной функции замкнутой системы,
при использовании для последовательной коррекции физически реализуемых

134
простых регуляторов. Вспомогательные контуры называют подчиненными конту-
рами регулирования, а структура, показанная на рис. 5.2, представляет структуру
подчиненного регулирования обобщенных координат объекта.
Динамические показатели качества регулирования каждой обобщенной ко-
ординаты определяются соотношением постоянных
a
i
. На практике принимают
aa a
n12
2====...
, такая настройка называется настройкой на технический оп-
тимум или оптимум по модулю
. Она обеспечивает минимальное время регулиро-
вания
tT
p
= 47,
μ
при незначительном перерегулировании
σ
= 43%,
.
При настройке всех контуров на технический оптимум
()a
i
= 2 передаточ-
ную функцию i - го разомкнутого контура с помощью (5.39) и (5.47) можно запи-
сать так
Wp
Tp Tp
pazi
ii
()
()
=
+
−
1
22 1
1
μμ
. (5.50)
То же для замкнутого контура
Wp
Tp Tp
pazi
ii
()
()
=
++
−
1
22 11
1
μμ
. (5.51)
В случаях, когда требуется более высокая точность регулирования исполь-
зуют ПИД - регуляторы обеспечивающие настройку на
симметричный оптимум.
При такой настройке желаемую передаточную функцию разомкнутого контура
записывают в виде
Wp
Tp
Tp TpTp
()
()
=
+
+
41
4
1
21
μ
μμμ
. (5.52)
Формула (5.52) записана для первого внутреннего контура и может быть
применена для следующих контуров, если в нее подставлять соответствующие
значения
TT
i
i
μμ
=
−
2
1
. Астатизм системы в этом случае повышается до двух, но
при этом перерегулирование возрастает до 56 %.

135
5.4. Синтез регуляторов при модальном управлении
Синтеза параметрических регуляторов на основе метода подчиненного ре-
гулирования, или метода логарифмических частотных характеристик применимы
в первую очередь для одномерных объектов, или предполагают заранее заданную
последовательную структуру объекта при скалярном управлении. При векторном
управлении многомерным объектом использовать данные методы синтеза затруд-
нительно. В этом случае
более предпочтительным является использование мо-
дального управления (от латинского слова moda - корень).
В соответствии с теорией модального управления для всякого полностью
управляемого объекта
BuAx
x
+=
d
t
d
. (5.53)
всегда можно найти управление
xCu
T
=
, (5.54)
такое, что корни (моды) характеристического полинома замкнутой системы
)det()(
T
BCAI −−= ppD (5.55)
имеют наперед заданные значения
pp p
n12
,,..., I - единичная матрица.
Корни характеристического уравнения можно задать, используя корневые
критерии качества.
Докажем это утверждение, для этого подставим (5.54) в (5.53)
xBCA
x
T
)( +=
d
t
d
. (5.56)
Подвергнем последнее уравнение преобразованию Лапласа
)()()(
ppp xBCAxI
T
+= . (5.57)
Приведя подобные члены, получим:
0)()(
=−− pp xBCAI
T
. (5.58)

136
Нетривиальное решение этого уравнения может быть найдено из условия
равенства нулю определителя системы
0=−−
T
BCAIp . (5.59)
Это характеристическое уравнение системы, которое всегда можно привес-
ти к виду:
pap ap apa
nn n
nn
+++++=
−
−
−1
1
2
2
1
0.... . (5.60)
Значения коэффициентов
a
i
можно найти по теореме Виетта
,.......
..............................................................
;...
;...
;....
21
312421321
213121
121
nn
nnn
nn
n
appp
appppppppp
apppppp
appp
=
−=+++
=++
−
=
+
+
−−
−
(5.61)
где
p
i
- корни характеристического уравнения (5.60).
С учетом полной управляемости эта система алгебраических уравнений все-
гда разрешима относительно неизвестных коэффициентов
c
ij
матрицы управле-
ния
T
C .
Таким образом, синтез регуляторов при модальном управлении сводится к
выражению коэффициентов характеристического уравнения
a
i
через заданные
коэффициенты матриц
A и B , а также неизвестные коэффициенты матрицы
T
C с
последующим их определением путем решения уравнения (5.61) при заданных
корнях характеристического уравнения
p
i
.
Рассмотрим случай скалярного управления, когда
u является скаляром.
Построение модального управления в этом случае осуществляется в сле-
дующем порядке [4].
Уравнение системы (5.53) приводится к канонической управляемой форме
(форме Фробениуса)
ub
(
(
(
&
(
+
=
xAx , (5.62)
137
где
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
=
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
−−−
=
−
−
1
:
0
0
,
.......
100:
000
0010
110
2
b
ddd
n
n
I
A
(
2−n
I - единичная матрица размера ()()nn
−
×
−
22, dd d
n01 1
, ,....
−
- коэффициенты
характеристического полинома объекта, задаваемого выражением:
Dp p d p dp d
n
n
n
( ) ......=+ +++
−
−
1
1
10
. (5.63)
Переход от переменной
x
к x
(
осуществляется преобразованием
xΨx
1
(
−
=
, (5.64)
где
1
)....)(.....(
−−−
= bbbbbb
1n1n
.AAAAΨ
(
(
(
(
(
Из структуры матрицы
A
(
следует, что уравнение системы в канонически
управляемой форме (5.62) может быть представлено в символической форме как:
)()()(
1
pupxpD
=
(
. (5.65)
Сравнивая это уравнение и заданный полином с известными корнями харак-
теристического уравнения
p
i
( ) ....
***
pp p dp dpd
i
nn
p
n
−=+ +++=
−
=
∏
1
10
1
0 (5.66)
получим
)()()()()(
1
*
1
pxpDpupxpD
(
(
=− . (5.67)
Разрешая последнее уравнение, относительно
u
p
() будем иметь
[
]
)()()()(
1
*
pxpDpDpu
(
−= . (5.68)
Раскрывая выражение, стоящее в квадратных скобках (5.68), найдем коэф-
фициенты матрицы управления
C
(
112
1
1
)....()( xcpcpcpcpU
n
n
n
n
(
(
(
(
(
++++−=
−
−
, (5.69)
где
cd di n
ii i
=− =
*
, , ....12 .
Принимая во внимание, что
1+
=
ii
xxp
(
(
получим
138
∑
=
−=−=
n
i
ii
xcu
1
xC
T
(
(
((
, (5.70)
где
C
(
- n- мерный вектор чисел.
Возвращаясь к исходным переменным, найдем исходный вектор
C
ΨCC
TT
(
=
. (5.71)
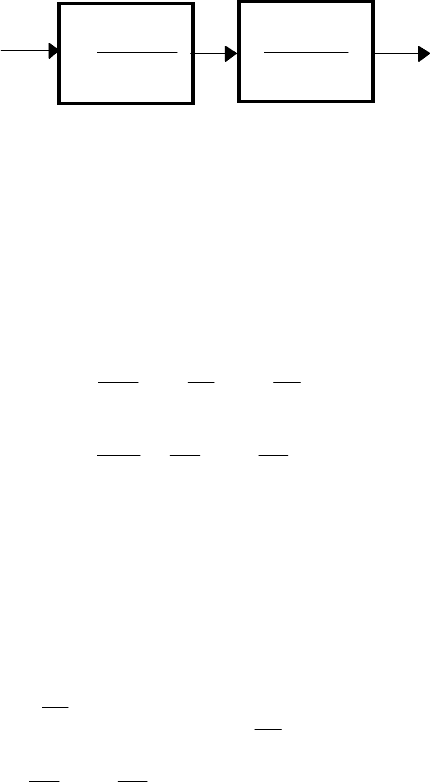
Рассмотрим пример вычисления матрицы
C
при модальном управлении.
Пусть имеется объект со структурной схемой рис. 5.6.
u x
1
x
2
k
Tp
1
1
1+
k
Tp
2
2
1+
Рис. 5.6.
и заданными корнями характеристического уравнения замкнутой системы
p
i
.
В развернутом виде уравнения (5.53) движения объекта можно записать в
следующем виде
,
1
;
1
2
2
1
2
22
1
1
1
1
1
x
T
x
T
k
dt
dx
u
T
k
x
Tdt
dx
−=
+−=
,
а уравнение для скалярного управления:
ucx cx
=
+
11 2 2
.
Матрицы
CB,A,
будут выглядеть следующим образом
()
21
1
1
22
2
1
,
0
,
1
0
1
cc
T
k
TT
k
T
=
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
=
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎝
⎛
−
−
= CBA .
Характеристическое уравнение системы найдем из уравнения (5.59), под-
ставляя сюда заданные матрицы
CB,A,
139
p
T
k
T
c
k
T
c
k
T
p
T
+− −
−+
=
1
1
0
1
1
1
1
1
1
2
2
22
,
или
p
TT
k
T
cp
TT
k
T
c
kk
TT
c
2
21
1
1
1
21
1
1
1
12
12
2
11 11
0++−
⎛
⎝
⎜
⎞
⎠
⎟
+−
⎛
⎝
⎜
⎞
⎠
⎟
−=. (5.72)
Заданное характеристическое уравнение имеет вид:
()( )pp pp
−
−
=
12
0,
или
pppppp
2
12 12
0−+ + =()
. (5.73)
Приравнивая одноименные коэффициенты при характеристических поло-
низмах (5.72) и (5.73) получим систему уравнений для вычисления коэффициен-
тов
cc
12
,
11
11
12
1
2
112
21
1
1
1
12
1
212
TT
k
T
cpp
TT
k
T
c
kk
T
cpp
+− =−+
−−
⎛
⎝
⎜
⎞
⎠
⎟
=
()
.
5.5. Аналитическое конструирование регуляторов
Впервые задача аналитического конструирования регуляторов (АКОР) ре-
шена А.М. Летовым в 1960 году. В зарубежных источниках задача АКОР называ-
ется задачей линейно-квадратичного управления или оптимизации.
Исходная постановка задачи АКОР формулируется следующим образом [4]:
для объекта управления
, движение которого в первом приближении описывается
уравнением:
0
)0(; xx
d
t
d
=+=
BuAx
x
, (5.74)
140
где
А и В заданные матрицы размеров nn
×
и nm
×
соответственно, найти мат-
рицу
С, размером mn× уравнения регулятора
xCu
T
=
(5.75)
такую, чтобы на асимптотически устойчивых движениях системы задаваемой
уравнениями (5.74) и (5.75), создаваемых произвольными начальными склоне-
ниями xx()0
0
= минимизировать интегральный квадратичный критерий (функ-
ционал)
()
dtI
∫
∞
+=
0
uuQxx
TT
. (5.76)
где,
Q- заданная положительно определенная матрица размером nn× .
Доказательство единственности и существования управления (5.75) , осу-
ществляется в рамках теории оптимального управления [4] и нами рассматривать-
ся не будет
Рассмотрим процедуру АКОР которая состоит из следующих операций:
1. Составляется векторно-матричное алгебраическое уравнение Риккати
0=+−+ QPPBBPAPA
TT
. (5.77)
2. Осуществляется его решение, т. е. определяются неизвестные коэффици-
енты матрицы
Р.
3. Вычисляется матрица
С по формуле
PBC
−
=
. (5.78)
Отметим подобие законов управления при модальном и линейно-
квадратичном управлении. Однако в первом случае искомая матрица
C обеспечи-
вает заранее заданное расположение корней характеристического управления, а
во втором случае подобная ей матрица обеспечивает минимум интегрального
квадратичного критерия (5.76).
В качестве примера рассмотрим процедуру АКОР для системы задаваемой
структурой рис. 5.7.
Структура системы регулирования показана на рисунке 5.7.