Арменский Е.В., Фалк Г.Б. ??Электромеханические устройства автоматики
Подождите немного. Документ загружается.


–71–
τ
м
pω(p)+ ω(p)= ω
оα
.
(2.45)
Если за входную величину принять напряжение управления Uy, а за
выходную - угловую скорость ротора
ω, то выражение передаточной
функции, полученное из (2.45), будет иметь вид
(2.46)
Как видно, исполнительный двигатель является апериодическим
звеном. Коэффициент передачи двигателя К
дв
=ω
оα
/U
y
представляет собой
отношение приращения угловой скорости ротора к приращению
напряжения управления в установившемся режиме; при линейной
регулировочной характеристике К
дв
равен ее крутизне.
Если за выходную величину двигателя принять угол
θ поворота
ротора (
ω(p)=рθ(р)), то двигатель является инерционным интегрирующим
звеном с передаточной функцией:
(2.47)
Переходная функция
θ=f(t) имеет вид
θ= К
дв
U
y
[t-τ
м
(1-е
-t/τм
)].
(2.48)
График переходной функции показан на рис. 2.24, б.
Основные меры по уменьшению τ
м
и увеличению быстродействия
исполнительных асинхронных микродвигателей следующие: снижение
момента инерции ротора, например, применение полого немагнитного
ротора; увеличение пускового момента за счет совершенствования
конструкции.
Сравнение по быстродействию исполнительных асинхронных
микродвигателей с полым немагнитным ротором и с ротором типа
"беличьей клетки" наиболее целесообразно проводить при одинаковых
мощностях на валу, уровне суммарных потерь
на единицу поверхности
корпуса, характеризующем нагрев двигателя, нелинейности характеристик
и частоте питающей сети.
Соотношение
τ
м
рассматриваемых микродвигателей при одинаковой
угловой скорости прямо пропорционально отношению моментов инерции
.
1)(
)(
)(
+
==
p
K
pU
p
pW
м
дв
y
τ
ω
.
)1()(
)(
)(
+
==
pp
K
pU
p
pW
м
дв
y
τ
θ

–72–
ротора и обратно пропорционально отношению пусковых моментов.
Момент инерции полого немагнитного ротора значительно меньше, чем
ротора типа "беличьей клетки" того же диаметра и длины. Однако у
роторов типа "беличьей клетки" допустимое по механической прочности
отношение длины к диаметру больше, чем у тонкостенных полых
немагнитных роторов, консольно закрепленных на валу. Значит, при
неизменной поверхности, необходимый для проведения основного
магнитного потока, диаметр ротора типа "беличьей клетки" и его момент
инерции могут быть уменьшены за счет увеличения длины.
Пусковой момент при отсутствии насыщения магнитопровода и
прочих равных условиях может быть получен больше у микродвигателей с
ротором типа "беличьей клетки" за счет меньшего воздушного зазора.
Указанные факторы определяют сравнительные параметры
быстродействия исполнительных асинхронных микродвигателей. В
диапазоне мощностей в единицы и доли ватт (примерно до 5 Вт) при
относительно небольших габаритах и массе ротора у двигателей с ротором
типа "беличьей клетки" можно получить меньшую постоянную времени
τ
м
,
чем при полом немагнитном роторе. При частоте 400 Гц в указанном
диапазоне мощностей у микродвигателей с полым немагнитным ротором
τ
м
лежит в пределах 15÷90 мс, а с ротором типа "беличьей клетки" - в
пределах 10
÷40 мс. Среди двигателей большей мощности преимущество
по быстродействию в основном имеют двигатели с полым немагнитным
ротором. При частоте 400 Гц у двигателей мощностью 10
÷50 Вт с полым
немагнитным ротором значение
τ
м
лежит в пределах 15÷100 мс, а с
ротором типа "беличьей клетки" - в пределах 50
÷300 мс.
§ 2.9. Асинхронные тахогенераторы
Тахогенераторами называют электрические микромашины,
работающие в генераторном режиме и служащие для преобразования
угловой скорости в пропорциональный электрический сигнал. Выходная
характеристика тахогенератора, т.е. зависимость между входной
величиной – угловой скоростью вала
ω
2
и выходной – напряжением U
вых
выходной обмотки, имеет вид
U
вых
=К
тг
ω
2
= К
тг
d
dt
Θ
2
,
(2.50)
где
Θ
2
- угол поворота ротора тахогенератора;
К
тг
- коэффициент передачи, равный крутизне тахогенератора ;
S
тг
= ΔU
вых
/Δω
2
.
Как видно, тахогенератор можно использовать для
электромеханического дифференцирования, если функцию задавать в виде
угла поворота ротора.
–73–
Основные требования, предъявляемые к тахогенераторам, состоят в
следующем: минимальная погрешность отображения функциональной
зависимости, под которой понимают отклонение выходной характеристики
от линейной зависимости; минимальное изменение фазы выходной ЭДС
при изменении угловой скорости ротора; максимальная крутизна.
К тахогенераторам предъявляют также требования, зависящие от
условий применения.
Конструкция и принцип действия. Конструкция асинхронных
тахогенераторов аналогична конструкции исполнительных асинхронных
двигателей с полым немагнитным ротором (рис. 2.17).
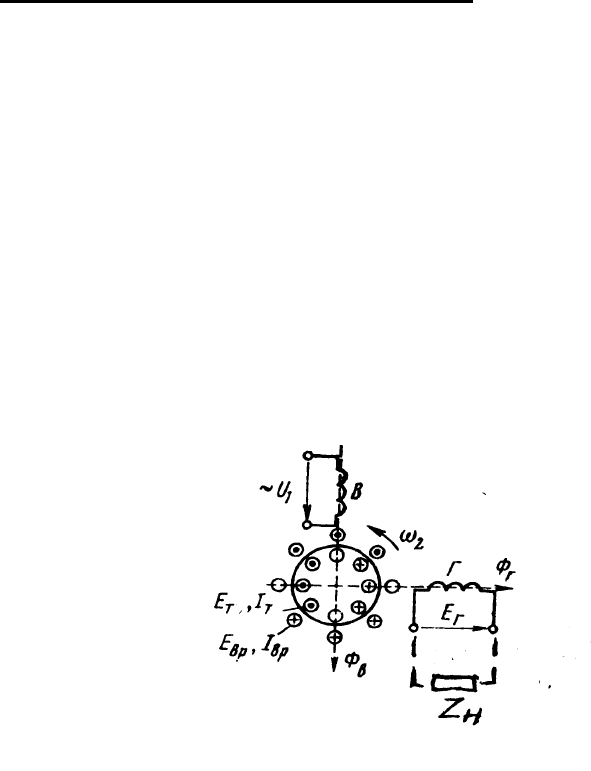
Рассмотрим принцип работы асинхронного тахогенератора. Для
этого воспользуемся эквивалентной схемой, представленной на рис. 2.25.
На этой схеме для упрощения качественного анализа полый ротор заменен
конечным числом проводников, замкнутых накоротко в торцах. Для
наглядности дальнейших пояснений проводники расположены в
два слоя,
хотя в действительности проводящий слой ротора единый. К обмотке
статора В подводится неизменное по амплитуде и частоте напряжение
возбуждения U
1
. Вторая обмотка статора Г является генераторной ,и с её
выводов снимается выходной сигнал Е
г
. В общем случае обмотка замкнута
на нагрузочное сопротивление Z
н
.
Рис.2.25
При неподвижном роторе тахогенератор можно рассматривать как
трансформатор, первичной обмоткой которого служит обмотка статора В,
а вторичной – обмотка ротора. Магнитный поток, созданный МДС
обмотки В, пронизывает ротор и наводит в его проводниках
трансформаторную ЭДС Е
т
(условно показана на внутреннем слое
проводников). Поскольку ротор короткозамкнутый, по этим проводникам
течет ток I
т
и создается МДС, направление которой определяется правилом
Ленца. Следовательно, по оси В тахогенератора устанавливается
результирующий магнитный поток Ф
в
, пульсирующий с частотой f
1

–74–
напряжения возбуждения. При этом ЭДС Е
г
в генераторной обмотке равна
нулю, так как вектор магнитного потока Ф
в
перпендикулярен оси этой
обмотки.
Приведем ротор тахогенератора во вращение с угловой скоростью
ω
2
. Ввиду симметрии ротора процесс наведения в нем трансформаторной
ЭДС Е
т
не изменится. По оси В, как и в предыдущим случае, пульсирует
магнитный поток Ф
в
, который в первом приближении можно считать не
зависящим от
ω
2
. Проводники ротора вращаются в поле Ф
в
и в них
наводится ЭДС вращения Е
вр
(условно показана на внешнем слое
проводников). При Ф
в
=const ЭДС Е
вр
является линейной функцией
угловой скорости ротора. Под действием ЭДС вращения в обмотке ротора
течет ток I
вр
и создается магнитный поток Ф
г
. Направление потока Ф
г
,
определенное по мнемоническому правилу буравчика, совпадает с осью
генераторной обмотки Г. Поскольку ток I
вр
прямо пропорционален ЭДС
Е
вр
, то созданный этим током магнитный поток Ф
г
прямо пропорционален
угловой скорости ротора
ω
2
. Частота пульсации Ф
г
совпадает с частотой
напряжения возбуждения. Магнитный поток Ф
г
индуцирует в
генераторной обмотке статора трансформаторную ЭДС Е
г
= 4,44f
1
Ф
г
w
г.эф
,
где w
г.эф
– число эффективных витков обмотки Г.
Поскольку поток Ф
г
прямо пропорционален угловой скорости
ротора, то при принятом допущении о постоянстве потока Ф
в
функция
Е
г
=f(ω
2
) является линейной. Частота выходной ЭДС Е
г
совпадает с
частотой f
1
потока и напряжения возбуждения и не зависит от угловой
скорости ротора
ω
2
.
В действительности, магнитный поток Ф
в
несколько уменьшается
при увеличении угловой скорости ротора
ω
2
, т.к. возрастает
размагничивающее действие токов ротора. Выходная характеристика
тахогенератора Е
г
=f(ω
2
) отклоняется от линейной зависимости, т.е.
появляется погрешность отображения функциональной зависимости.
Если замкнуть обмотку Г на нагрузочное сопротивление Z
н
, то по
ней потечет ток I
г
. Поток Ф
г
будет создаваться геометрической суммой
МДС ротора и обмотки статора Г, что скажется на амплитуде ЭДС Е
г
.
Кроме того, само выходное напряжение U
г
будет определяться
геометрической разностью ЭДС Е
г
и падением напряжения на собственном
сопротивлении обмотки Z
г
, т.е.
•
U
г
=
•
Е
г
-
•
I
г
Z
г
. Указанные физические
процессы обуславливают вид выходной характеристики тахогенератора
при работе с нагрузкой.
Выходная характеристика. Поскольку асинхронный тахогенератор
по своей конструкции не отличается от рассмотренного ранее
асинхронного исполнительного двигателя, то, учитывая принцип
обратимости электрических машин, можно определить выходное

–75–
напряжение U
г
, пользуясь изложенной в §2.7 методикой анализа
двухфазного микродвигателя.
Фазе Г асинхронного тахогенератора соответствуют схемы
замещения фазы В исполнительного двигателя (см. рис. 2.21), если в цепь
статора включить сопротивление Z
н
, а выходные выводы замкнуть
накоротко. Схемы замещения фазы В тахогенератора совпадают со
схемами замещения фазы В двигателя. Все параметры фазы Г
тахогенератора соответствуют параметрам фазы У двигателя.Тогда
,
2
*
*т
1
г
−−−−
•
•
−
=
BA
KUj
U
ω
ω
(2.51)
где А
и В - комплексные коэффициенты, зависящие от параметров схемы
замещения и нагрузки.
Если пренебречь индуктивным сопротивлением ротора, которое у
асинхронных тахогенераторов, особенно с полым немагнитным ротором,
значительно меньше активного, то
,2
'
1
2
'
2
2
2
1
'
2
2
2
1
'
2
2
2
2
1
B
B
B
B
B
B
B
B
B
B
н
C
R
CZ
RCZ
R
CZ
Z
A
−−
−−
−−
−−
−−
−−
−−
−−
==
++
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
++=
,1
©
1
©
2
1
__
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+=
−−
−−−−
’
B
B
B
Z
Z
R
Z
B
(2.52)
где
CZRZ
В
Bm
B
Bm
22
−−
−− −−
=+()/
'
(обозначения по рис. 2.21)
Относительная угловая скорость ротора
ω
*
=ω
2
/ω
1
=1-s, где ω
1
-
синхронная скорость (для тахогенератора эта скорость условная).
Выражение (2.51) является уравнением выходной характеристики
асинхронного тахогенератора. Наличие в знаменателе этого выражения
квадрата относительной скорости
ω
*
2
свидетельствует о нелинейности
выходной характеристики и изменении фазы выходного напряжения
тахогенератора (скоростные погрешности).
Для идеального тахогенератора, не имеющего скоростной
погрешности, уравнение выходной характеристики получают из
выражения 2.51 с учетом
ω
*
2
В=0:
−−
•
•
=
A
KUj
U
*т1
г.ид.
ω
.

–76–
(2.53)
Выходные характеристики, построенные по уравнению (2.51) для режимов
х.х. и активной нагрузки, представлены на рис. 2.26а, где
U
г*
=U
г
/U
1
(пунктиром показаны идеальные линейные характеристики).
Рис. 2.26а
Изменение выходного напряжения U
г
и крутизны S
тг
под влиянием
значения и характера нагрузочного сопротивления определяются
изменением комплексных коэффициентов А
и В в выражении (2.51) и
графически представлено на рис. 2.26б.
Рис. 2.26б
Физическое обоснование зависимостей U
г
, S
тг
= f(X
HC
,Х
HL
,R) уже
было дано при рассмотрении принципа работы тахогенератора. Здесь
только следует отметить, что в случае емкостной нагрузки при
определенном значении Х
нс
в цепи выходной обмотки имеет место
резонанс напряжений. У современных асинхронных тахогенераторов
крутизна при Z
н
>>Z
г
находится в диапазоне (1-10) мВ/(об/мин).
Погрешности и классы точности. Принципиальной погрешностью
преобразования угловой скорости в напряжение у асинхронных
тахогенераторов является рассмотренная выше скоростная составляющая
погрешности отображения функциональной зависимости и изменения
фазы.
Расчетная скоростная составляющая погрешности отображения
функциональной зависимости тахогенератора определяется разностью
–77–
модулей напряжений согласно (2.51) и (2.53), а изменение фазы –
разностью аргументов этих напряжений.
Как следует из (2.51) и (2.52), погрешность отображения уменьшается при
увеличении активного сопротивления ротора, так как снижается значение
коэффициента В. Однако нужно иметь в виду, что с увеличением активного
сопротивления ротора уменьшается крутизна тахогенератора, так как возрастает
значение коэффициента А.
Тахогенераторы целесообразно выбирать с такой синхронной
скоростью, при которой относительное значение измеряемой скорости не
будет превышать 0,2–0,3. В данном случае член
ω
*
2
мал, и выходная
характеристика на рабочем участке
ω
*
=0–0,3 практически линейна.
Поэтому часто тахогенераторы выполняют для работы от сети
переменного тока с повышенной частотой. Увеличение частоты
пропорционально повышает синхронную скорость и соответственно
понижает относительное значение измеряемой угловой скорости.
Среди
эксплуатационных погрешностей асинхронного
тахогенератора наиболее существенной является температурная
погрешность. В основном она обусловлена нагревом ротора, активное
сопротивление которого в несколько раз больше активного сопротивления
статорных обмоток. Увеличение активного сопротивления ротора при
нагреве приводит к изменению амплитуды и фазы выходного напряжения,
т.е. приводит к появлению температурной погрешности. Чтобы не
допустить данные
явления, ротор прецизионных асинхронных
тахогенераторов выполняют из материалов с низким значением
температурного коэффициента сопротивления и применяют
температурную компенсацию.
Технологические погрешности изготовления асинхронного
тахогенератора приводят к появлению остаточной ЭДС – ЭДС в
генераторной обмотке при неподвижном роторе. Эта ЭДС имеет две
составляющие: постоянную, не зависящую от углового положения ротора,
и переменную, которая изменяется в зависимости от угла поворота ротора.
Постоянная составляющая возникает в результате неточности сдвига
статорных обмоток на угол 90
0
и, соответственно, появления
трансформаторной связи между ними, и неоднородности магнитных
свойств магнитопровода статора. Электрическая асимметрия ротора,
заключающаяся в неодинаковой толщине его стенок или неточности его
цилиндрической формы, вызывает образование переменной составляющей
остаточной ЭДС.
Под влиянием остаточной ЭДС, не совпадающей по фазе с выходной
ЭДС Е
г
, происходит смещение выходной характеристики из начала
координат, появляются дополнительная составляющая погрешности
отображения и изменения фазы, особенно при малых угловых скоростях
ротора.
–78–
Асинхронные тахогенераторы имеют несколько классов точности в
зависимости от уровня погрешностей. При определении погрешности
отображения функциональной зависимости эталонная характеристика
представляет собой прямую, проведенную в установленном диапазоне
угловой скорости; у тахогенераторов различного класса погрешность
составляет от 0,025 до 1 %. Остаточная ЭДС определяется как наибольшая
остаточная ЭДС по основной гармонике в пределах оборота ротора,
отнесенная
к крутизне тахогенератора; у тахогенераторов различных
классов приведенное значение остаточной ЭДС составляет (15–50) об/мин.
Существенными достоинствами асинхронных тахогенераторов
являются высокая надежность,благодаря отсутствию скользящих
контактов, и простота конструкции. К недостаткам асинхронных
тахогенераторов следует отнести принципиальную нелинейность
выходной характеристики и невысокую крутизну.

–79–
ГЛАВА 3.СИНХРОННЫЕ МАШИНЫ
Синхронной называется машина переменного тока, у которой
угловая скорость ротора равна (или кратна) угловой скорости магнитного
поля, созданного обмотками переменного тока. Угловая скорость ротора
синхронной машины в синхронном режиме находится в постоянном
соотношении с частотой сети переменного тока и не зависит от нагрузки
машины. В синхронных машинах обмотка, в которой
индуктируется
основная ЭДС, называется обмоткой якоря. Часть машины, создающая
поток возбуждения, называется индуктором. В большинстве синхронных
машин обмотка якоря расположена на статоре, а ротор является
индуктором. Синхронные машины большой и средней мощности
выпускаются с трехфазной обмоткой якоря и используются, в основном, в
качестве генераторов переменного тока на электрических станциях.
Синхронные машины
малой мощности и микромашины выпускаются как с
трехфазной, так и с двухфазной обмоткой якоря и используются, в
основном, в качестве двигателей.
Синхронные машины большой и средней мощности и большинство ма-
шин малой мощности имеют электромагнитное возбуждение, т.е. на роторе
расположена обмотка возбуждения постоянного тока. Однако по мере
совершенствования магнитотвердых
материалов для возбуждения
синхронных машин все шире применяются постоянные магниты.
Синхронные микродвигатели в зависимости от способа возбуждения,
связанного с особенностями конструкции ротора, подразделяют на три типа:
с постоянными магнитами (активного типа), реактивные и гистерезисные.
Синхронные двигатели в соответствии с их режимом работы можно
разделить на три группы:
1) двигатели непрерывного вращения;
2) двигатели непрерывного вращения с пониженной угловой скоростью
ротора;
3) шаговые двигатели.
§ 3.1. Синхронная машина с электромагнитным возбуждением
В данном параграфе рассматривается конструкция и принцип работы
синхронной машины с электромагнитным возбуждением.
Конструкция. Статоры таких машин ничем не отличаются от
статоров асинхронных машин с двух- или трехфазной распределенной
обмоткой. Роторы могут быть явнополюсные и неявнополюсные.
–80–
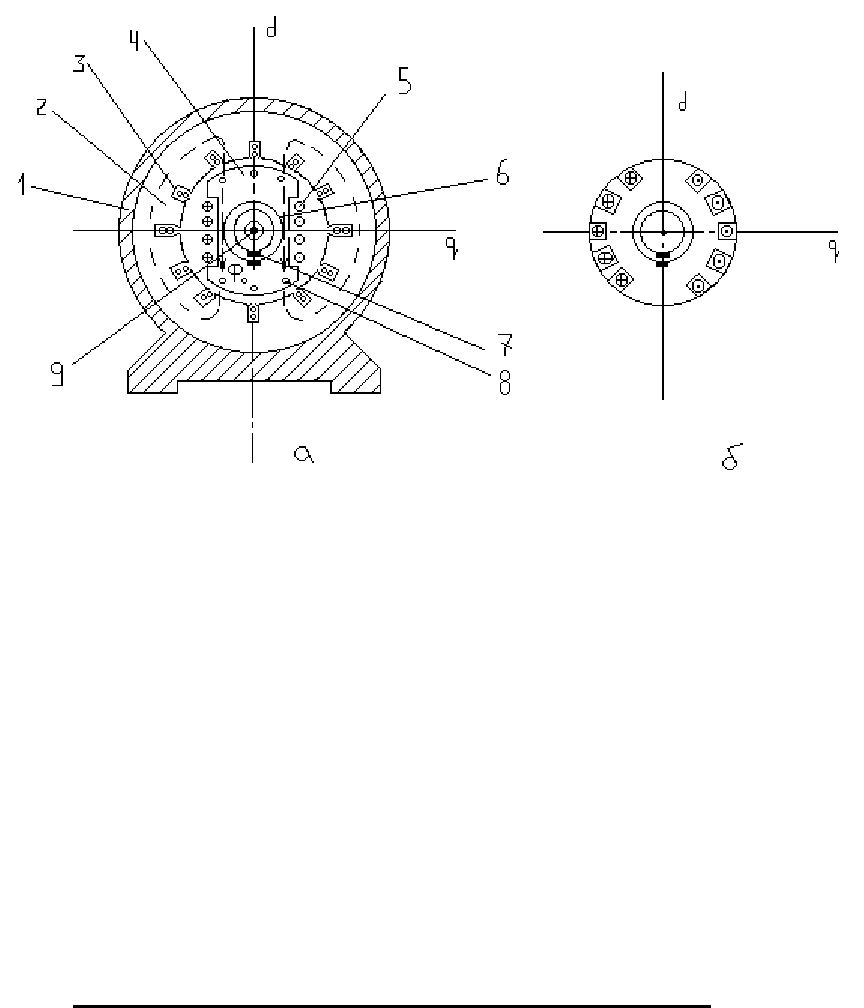
Рис 3.1
На рис.3.I,а представлена конструктивная схема двухполюсной ( р
м
= I)
синхронной машины с явнополюсным ротором. В корпусе I расположен
магнитопровод статора 2 с распределенной двух- или трехфазной
обмоткой 3. Магнитопровод ротора 4 изготовлен из листовой или
монолитной электротехнической стали. На нем расположена сосредо-
точенная обмотка возбуждения 5, которая подключается к источнику
постоянного тока через два контактных кольца 6, установленных на валу 9,
и щетки 7. В специальных пазах
полюсных наконечников ротора уложена
короткозамкнутая обмотка типа "беличьей клетки" 8, являющаяся в
режиме двигателя пусковой обмоткой. Характерным для явнополюсных
синхронных машин является неравенство магнитных сопротивлений по
продольной d и поперечной q осям машины ( R
Md
≠R
Mq
). В машинах с
большой угловой скоростью по соображениям механической прочности
ротор делается неявнополюсным (рис.3.I,б); у таких машин R
Md
=R
Mq
.
Принцип действия синхронного генератора. По обмотке
возбуждения индуктора пропускается постоянный ток, она создает
постоянный ток возбуждения
Φ
o
– основной поток машины (рис.3.1,а).
Индуктор приводится во вращение внешним устройством с угловой
скоростью
ω
2
. Вращающийся с ротором поток Ф
o
наводит в обмотках
фаз якоря ЭДС вращения Е
o
, изменяющиеся с частотой
f=
ω
2
Р
M
/2π . (3.1)
При синусоидальном законе распределения индукции в воздушном зазоре
закон изменения ЭДС во времени также будет синусоидальным. Сдвиг
фазных ЭДС во времени при трехфазной обмотке якоря равен 120
о
. При
подключении на выводы якоря приемника электрической энергии машина