Арменский Е.В., Фалк Г.Б. ??Электромеханические устройства автоматики
Подождите немного. Документ загружается.

–101–
и 6′, т.е. ротор повернется на угол (360°/Ζ
с
- 360°/Ζ
р
). Следовательно,
угловая скорость ротора
ω
2
меньше синхронной угловой скорости первой
гармоники поля статора
ω
1
в
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
ZZZ
pcc
360360360
раз,т.е.
ω
2
=ω
1
/Κ
ред
, (3.14)
где
ω
1
=2πƒ/р
м
, а коэффициент редуцирования угловой скорости
К
ред
=Ζ
р
/(Ζ
р
−Ζ
с
).
Для рассмотренного случая (рис. 3.15) К
ред
=4; у реальных двигателей
число зубцов может достигать нескольких сотен, и К
ред
существенно
возрастает.
В реактивных редукторных микродвигателях соотношение чисел
зубцов должно отвечать условию
Ζ
р
-Ζ
с
=2р
м
, т.е. К
ред
=Ζ
р
/2р
м
. Коэффициент
редуцирования возрастает с увеличением
Ζ
р
. Однако следует иметь в виду,
что число зубцов, которое можно разместить на окружности
определенного диаметра, ограничено минимальной по технологическим
соображениям толщиной зубца.
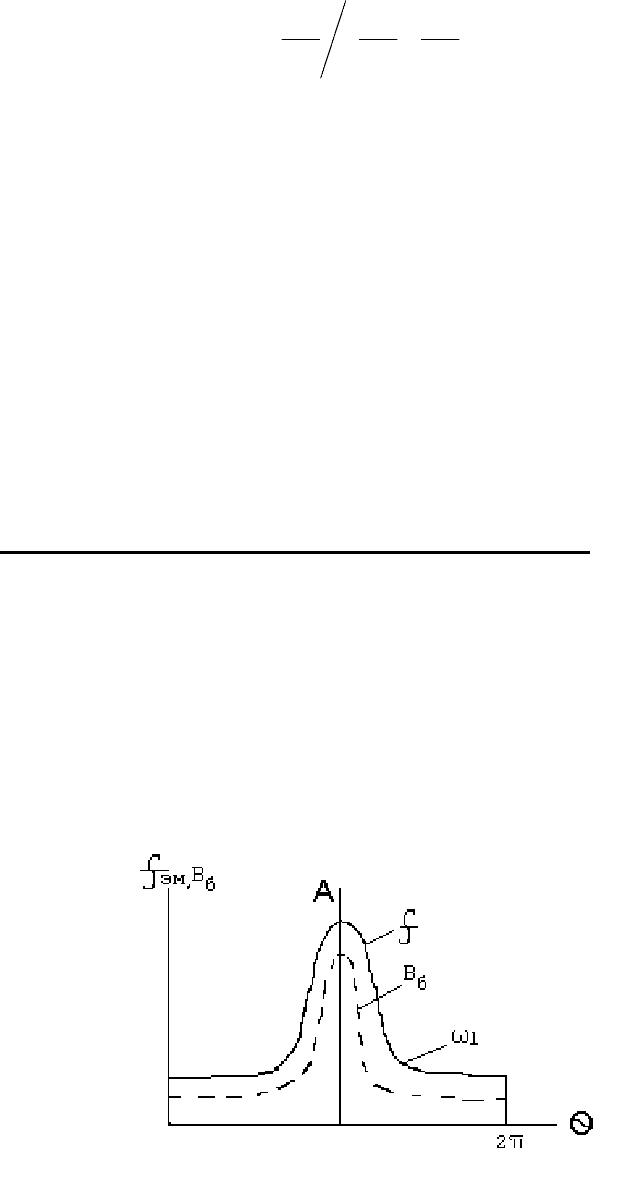
Микродвигатели с катящимся ротором. В синхронных
микродвигателях с катящимся ротором редуцирование угловой скорости
ротора по отношению к угловой скорости магнитного поля объясняется
тем, что ротор располагается эксцентрично в расточке статора и имеет
возможность катиться вдоль окружности статора. Основной
электромагнитный вращающий момент создается за счет сил
одностороннего магнитного притяжения ротора к статору
несимметричным вращающимся магнитным полем
.
Несимметричное поле имеет один глобальный максимум в пределах
окружности машины (кривая В
δ
на рис. 3.16 ).
Рис. 3.16
Электромагнитная сила притяжения
ƒ
эм
, действующая на единицу
поверхности ротора, пропорциональна квадрату индукции (соотношение
–102–
Максвелла). Следовательно, результирующая сила магнитного притяжения
ротора к статору направлена вдоль максимума волны индукции В
δ
, т.е. по
оси А результирующего вращающегося потока.
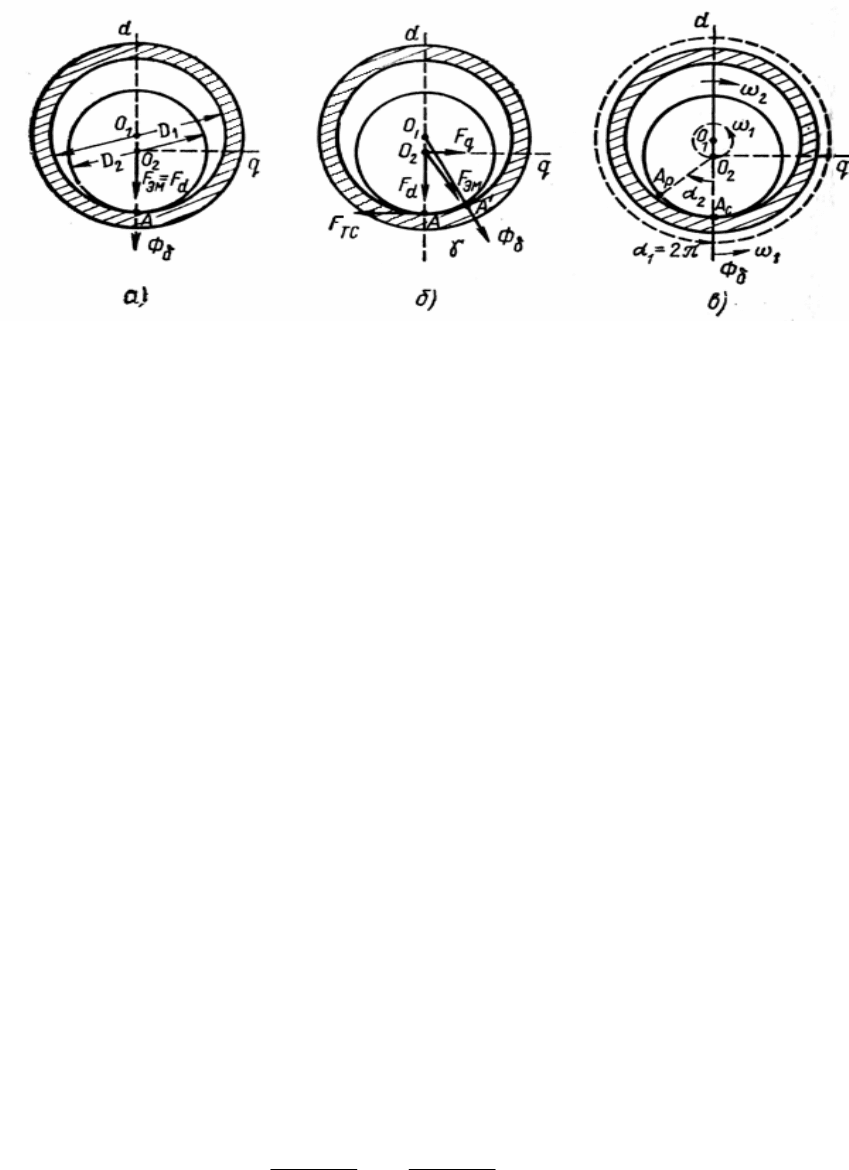
Рис. 3.17
Принцип действия двигателя с катящимся ротором можно
рассмотреть на модели, изображенной на рис. 3.17. В расточке статора,
имеющей диаметр D
1
, эксцентрично расположен ферромагнитный ротор с
наружным диаметром D
2
.Координатную ось, проходящую через центр
статора О
1
и точку минимального зазора, считаем продольной d, а
перпендикулярную ей – поперечной q.
В исходном положении (рис.3.17,а) ось потока
Φ
δ
проходит через
точку А соприкосновения статора и ротора. Сила F
эм
притяжения ротора к
статору направлена по оси d, составляющая по оси q равна нулю и ротор
находится в положении устойчивого равновесия.
При смещении потока
Φ
δ
(рис.3.17,б) относительно точки
соприкосновения А появляется составляющая силы притяжения по оси q.
Сила F
q
создает момент относительно точки А и под действием этого
момента ротор перекатывается по поверхности статора до тех пор, пока
точка соприкосновения ротора и статора не переместится в А
′ и центр
ротора О
2
не окажется на оси потока Φ
δ
.
Если поле совершит полный оборот α
1
=2π (рис.3.17,в), то за счет
разности окружностей качения статора и ротора (
πD
1
−πD
2
) в исходную
точку А
1
на поверхности статора придет точка ротора, смещенная по полю
относительно исходной А
2
на эту разностную дугу. Значит, ротор
повернется вокруг своего центра О
2
против направления вращения поля на
угол
D
DD
D
DD
2
21
1
2
21
2
2
−
=
−
=
αα
π
. (3.15)
При непрерывном вращении поля с угловой скоростью
ω
1
в двигателе
синхронно с полем в сторону поля вращается точка соприкосновения
–103–
ротора со статором и центр ротора О
2
относительно центра статора О
1
.
Ротор, как следует из (3.15), вращается вокруг своей оси О
2
против поля с
угловой скоростью
ω
2
=ω
1
(D
1
-D
2
)/D
2
,
(3.16)
которая является выходной скоростью двигателя. Если диаметры статора и
ротора выбраны близкими, то (D
1
-D
2
)/D
2
<<1 и ω
2
<<ω
1
, т.е. в двигателе
осуществляется значительное редуцирование угловой скорости.
В реальном двигателе, чтобы предохранить поверхности ротора и
статора от непосредственного соприкосновения и износа, происходит
обкатывание не ротора по статору, а катков ротора по направляющим
статора. Диаметры катков и направляющих D
к
и D
н
немного отличаются
соответственно от D
2
и D
1
. Поэтому выражение (3.16) принимает
вид:ω
2
=ω
1
/K
ред
, где коэффициент редуцирования K
ред
= D
к
/( D
н
-D
к
). У
современных микродвигателей коэффициент редуцирования достигает
1500.
Недостатком микродвигателей с катящимся ротором является
сложность конструкции самого двигателя и механизма передачи вращения,
что связано со специфическим несоосным вращением ротора.
Центробежные силы, возникающие за счет вращения центра ротора
относительно центра статора, вызывают вибрации, шумы и
неравномерность мгновенной угловой скорости ротора.
Волновые микродвигатели. Синхронные волновые микродвигатели
представляют собой конструктивное объединение электрической машины
и волновой зубчатой передачи.
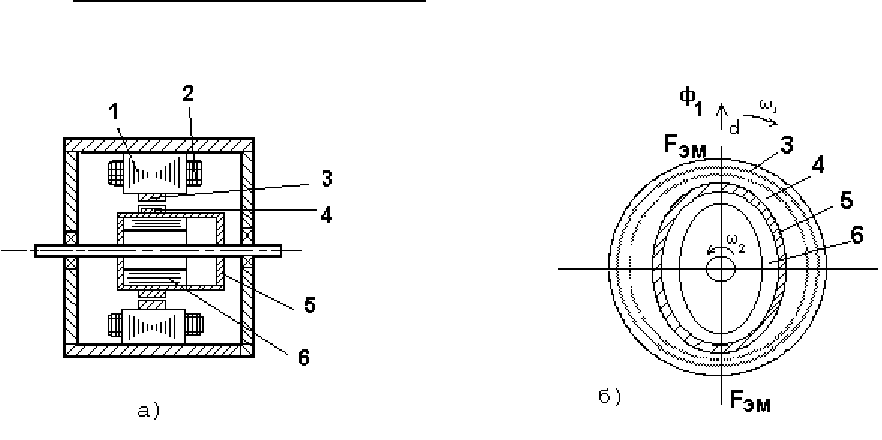
Рис 3.18
На рис. 3.18,а показана конструктивная схема синхронного волнового
реактивного микродвигателя. Статор имеет классическую для машин
переменного тока конструкцию: наборный цилиндрический
–104–
магнитопровод 1 с многофазной обмоткой 2, создающей вращающееся
магнитное поле. Жесткий зубчатый венец 3 укреплен на поверхности
статора. Гибкий зубчатый венец 4 находится на поверхности гибкого
деформирующегося ротора 5. Внутренний магнитопровод 6 представляет
собой упругое гибкое кольцо, навитое из ленты пермаллоя. Он служит для
замыкания магнитного потока вдоль окружности ротора и деформации
ротора под действием сил притяжения к статору.
При отсутствии магнитного поля статора ротор имеет
цилиндрическую форму, и зацепление между гибким и жестким
зубчатыми венцами отсутствует. Если подать
переменное напряжение на
обмотку статора, то в воздушном зазоре создается вращающееся со
скоростью ω
1
=2πƒ/Р
м
магнитное поле Ф
1
. В поле на внутренний
магнитопровод ротора действуют силы электромагнитного притяжения к
статору. Эти силы растягивают упругий магнитопровод в радиальном
направлении вдоль результирующих сил притяжения F
эм
, действующих по
оси поля (рис. 3.18,б). При этом деформируется ротор и находящийся на
нем гибкий венец волновой передачи, и зубцы гибкого венца входят в
зацепление с зубцами жесткого венца, расположенного на статоре. Число
волн механической деформации ротора в двигателях реактивного типа
равно числу полюсов.
Волны механической деформации ротора вращаются синхронно
с
полем с угловой скоростью ω
1,
и гибкий венец катится по поверхности
жесткого. В волновой передаче происходит редуцирование скорости, и
гибкий венец вместе с ротором медленно вращается относительно своей
оси в сторону, противоположную полю, с постоянной скоростью ω
2
= ω
1
/
К
ред
, где К
ред
=Z
г
/(Z
ж
-Z
г
) – коэффициент редуцирования, равный
передаточному отношению волновой передачи; Z
ж
и Z
г
– число зубцов
соответственно жесткого и гибкого венцов, причем Z
ж
>Z
г
.
В волновых двигателях вращающиеся массы динамически
уравновешены, что обеспечивает более низкий уровень вибрации, чем у
двигателей с катящимся ротором.
Недостатком волновых микродвигателей является сложность
конструкции и технологии изготовления, связанная в основном с
требованием обеспечения необходимой эластичности ротора.
Существенное преимущество всех рассмотренных микродвигателей
заключается в отсутствии быстровращающихся частей и подшипников, что
значительно повышает их надежность. Например, гарантируемый срок
службы синхронных редукторных микродвигателей в три-четыре раза
больше, чем у синхронных микродвигателей с механическими
редукторами, обеспечивающих одинаковую частоту вращения выходного
вала. КПД и масса на единицу развиваемой мощности у рассмотренных
микродвигателей сильно зависят от реализуемого коэффициента

–105–
редуцирования скорости: чем больше коэффициент редуцирования, тем
хуже эти показатели.
Конструкция индукторного типа за счет подмагничивания ротора
обеспечивает лучшие массо-энергетические и моментные характеристики,
чем конструкции реактивного типа. Однако при этом усложняется
конструкция и возрастает стоимость двигателя.
§ 3.4. Синхронные шаговые микродвигатели
В связи с развитием цифровой вычислительной техники
разрабатывают и совершенствуют исполнительные элементы дискретного
действия и, в частности, электрические шаговые двигатели. Шаговыми
называют синхронные двигатели, преобразующие команду, заданную в
виде импульсов, в фиксированный угол поворота вала или фиксированное
перемещение без датчиков обратной связи. Шаговые двигатели
выпускаются мощностью от единиц микроватт до киловатта
, т.е. в
основном, это микродвигатели малой мощности.
Шаговые микродвигатели (ШД) работают в комплекте с
полупроводниковыми коммутаторами. Роль коммутатора состоит в
переключении обмоток управления ШД с последовательностью и частотой,
соответствующими заданной команде. Шаговый двигатель совместно с
коммутатором можно рассматривать как систему частотного регулирования
угловой скорости синхронного двигателя, отличающегося импульсным
питанием
и возможностью фиксации углового положения ротора. При этом
результирующий угол поворота ШД строго соответствует числу
переключений обмоток управления, направление поворота – порядку
переключений, а угловая скорость – частоте переключений.
Шаговые двигатели можно подразделить на три основные
конструктивные группы: с постоянными магнитами (активного типа),
реактивные и индукторные. Они могут иметь различное число фаз, но
наибольшее распространение получили двух-, трех- и четырехфазные ШД.
Обмотка фазы статора либо целиком является обмоткой управления, либо
ее расщепляют на две (выводом средней точки), магнитные оси которых
сдвинуты в пространстве на 180º. Напряжение питания обмотки
управления шагового двигателя представляет собой последовательность
однополярных или разнополярных прямоугольных импульсов,
поступающих от коммутатора.
Двигатели активного типа. Статор шаговых двигателей в отличие
от синхронных микродвигателей непрерывного вращения имеет
явновыраженные полюсы, на которых располагают обмотки управления.
Число пар полюсов каждой из обмоток правления Р
м
равно числу пар
полюсов ротора.
–106–
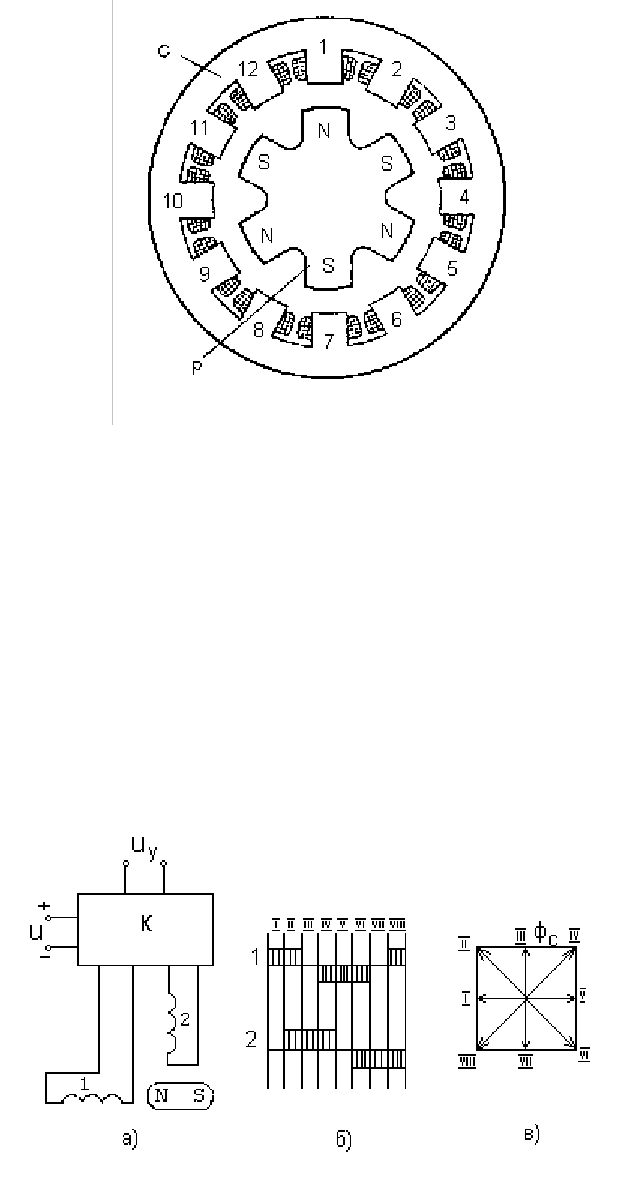
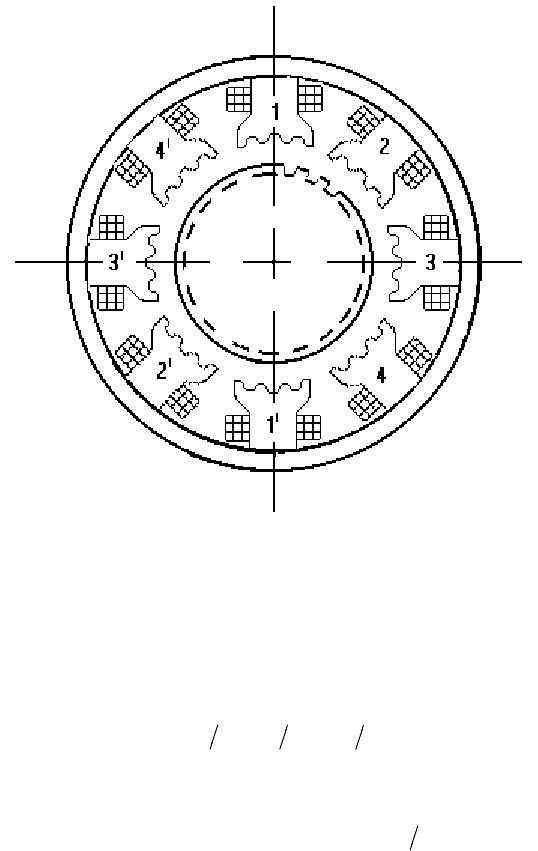
Наибольшее распространение получили ШД активного типа (рис.
3.19) с ротором Р из постоянного магнита, выполненного в виде
«звездочки» литой или составной конструкции.
Рис 3.19
Приведенный на рис. 3.19 ШД имеет две обмотки управления и три
пары полюсов. Катушки, расположенные на нечетных полюсах 1,3... 11
статора С, соединены последовательно, образуя одну обмотку управления.
Катушки, расположенные на четных полюсах 2,4... 12 образуют вторую
обмотку управления, сдвинутую относительно первой на электрический
угол 90º. При подаче напряжения на любую из обмоток управления
входящие
в ее состав полюсы намагничиваются в следующей
последовательности: N,S, N,S, N,S.
Принцип действия рассмотрим на примере двухполюсного двигателя.
Рис.3.20
–107–
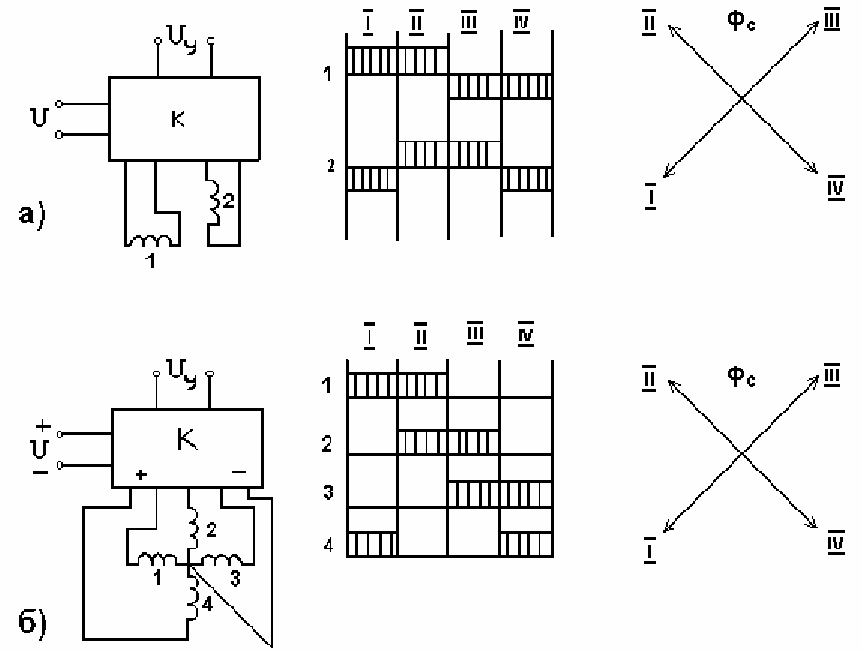
На рис. 3.20,а показана схема подключения обмоток управления 1 и
2 двухфазного ШД к коммутатору К. Точками обозначены начала обмоток,
U – напряжение питания, U
у
– импульсный сигнал управления. На рис.
3.20,б изображена временная диаграмма силовых импульсов напряжения
на обмотках управления двигателя при восьмитактной ( I-УШ ),
разнополярной системе коммутации. Переход от одного такта к другому
соответствует поступлению на коммутатор очередного импульсного
сигнала управления. При этом, как видно, скачкообразно изменяется
значение или полярность напряжения на обмотках управления.
Рассмотрим
более подробно, что происходит в эти моменты времени
в двигателе. Во время такта I положительный импульс тока возбуждает
обмотку управления 1 (рис. 3.20,а). Магнитный поток статора Ф
с
направлен по оси этой обмотки (рис.3.20,в). Ротор (постоянный магнит NS)
притягивается к полюсам обмотки I и занимает положение вдоль ее оси.
При переходе к такту II дополнительно возбуждаются полюсы обмотки
управления 2. Результирующий поток статора Ф
с
, создаваемый теперь
двумя обмотками, скачком поворачивается на 45º (рис. 3.20,в). Возникает
синхронизирующий момент синхронного двигателя, и ротор
поворачивается на тот же угол. При переходе к такту III остается
возбужденной только обмотка 2. Поток статора и ротор поворачиваются
еще на один шаг, равный 45º. Положение потока статора на всех восьми
тактах показано на рис. 3.20, в.
Показанная на рис. 3.20 раздельно-совместная последовательность
включения обмоток управления является несимметричной системой
коммутации, так как нечетным и четным тактам соответствует
возбуждение различного числа обмоток. Результирующий поток статора
меняется от такта к такту, что вызывает пульсацию синхронизирующего
момента и является недостатком схемы.
Систему коммутации называют симметричной, если на всех тактах
возбуждается одинаковое
число обмоток управления (раздельно, парами и
т. д.).
–108–
Рис. 3.21
На рис. 3.21 изображены схемы включения обмоток управления,
временные диаграммы импульсов напряжения на обмотках и
пространственные диаграммы положений результирующего потока
статора Ф
с
для симметричной разнополярной схемы (рис. 3.21,а)
коммутации ШД с двухфазной нерасщепленной обмоткой статора (m
у
=2)
и симметричной однополярной схемы (рис. 3.21,б) коммутации ШД с
двухфазной расщепленной обмоткой статора (m
у
=4, такую обмотку часто
называют четырехфазной). Сравнение этих двух схем показывает, что
применение разнополярной коммутации в двигателях с нерасщепленными
обмотками фаз статора сказывается на шаге равносильно расщеплению
обмоток управления при однополярной коммутации.
Из сравнения рис. 3.20,в и 3.21,а видно, что при симметричной
коммутации шаг увеличивается вдвое, а результирующий поток статора на
всех тактах одинаков.
В общем случае число шагов результирующего потока статора и ротора в
пределах 360º прямо пропорционально числу обмоток управления m
у
и
зависит от схемы управления. Количество состояний коммутатора,
обеспечивающих новое угловое положение результирующего магнитного
потока статора Ф
с
в пределах электрического угла 360º, назовем числом
тактов коммутации К
тк
схемы управления. Согласно вышеизложенному

–109–
К
тк
= m
у
К
1
К
2
, (3.17)
где К
1
– коэффициент, равный 1 при симметричной и 2 при
несимметричной коммутации; К
2
– коэффициент, равный 1 при
однополярной и 2 при разнополярной коммутации (применение
разнополярной коммутации в двигателях с расщепленными обмотками фаз
статора смысла не имеет).При этом электрический шаг ротора ШД
α
шэ
=360º/К
тк
. (3.18)
Реальные шаговые микродвигатели являются многополюсными
(р
м
>1) и механический шаг, т.е. угол поворота ротора при воздействии
одного сигнала управления и установленной схеме коммутации,
α
ш
=α
шэ
/
р
м
= 360º/(К
тк
р
м
). (3.19)
Увеличение числа пар полюсов при неизменном диаметре ротора
ограничено технологическими возможностями и увеличением потока
рассеяния между полюсами, обычно р
м
=4÷6. Увеличение числа обмоток
управления связано с усложнением коммутатора, обычно m
у
=2÷4.
Поэтому у активных ШД
α
ш
составляет порядка десяти градусов.
Дальнейшее уменьшение шага достигается либо механическим
редуцированием с помощью специальных кинематических механизмов,
либо специальными схемами электрического дробления шага, которые
будут описаны далее в § 3.6.
Реактивные двигатели. В конструкции реактивных шаговых
двигателей с целью уменьшения шага используют принцип
электромагнитного редуцирования скорости, изложенный в § 3.3
Рассмотрим особенности конструкции и принцип действия
четырехфазного реактивного редукторного ШД (рис. 3.22).
–110–
Рис 3.22
Статор и ротор набирают из листовой электротехнической стали.
Поверхность ротора и полюсов статора зубчатая. Зубцовые деления ротора
и статора равны. Зубцы полюсов статора выполнены так, что, если зубцы
ротора соосны с зубцами одной диаметрально расположенной пары
полюсов статора, то относительно каждой из оставшихся трех пар полюсов
статора они смещены
на 41 , 42 и 43 зубцового деления. При
поочередном однополярном питании обмоток управления происходит
поворот магнитного потока статора на 45º и синхронизирующий
реактивный момент поворачивает ротор на
41
зубцового деления в
положение минимального магнитного сопротивления относительно
возбужденной пары полюсов. При большом числе зубцов ротора Z
р
его
угол поворота значительно меньше угла поворота статора.
В общем случае указанное смещение осей зубцов полюсов статора
производится на угол 360°/(m
y
z
p
). За полный цикл коммутации ротор
поворачивается на одно зубцовое деление 360/z
p ,
и шаг определяют по
формуле
)z/(K360
рткш
o
=
α
. (3.20)
Следует иметь в виду, что в реактивном микродвигателе изменение
направления поля на 180° не влияет на состояние ротора и при вычислении
шага в выражении (3.17) для
тк
K
необходимо брать 1
2
=K при
однополярной и при разнополярной коммутации.
В реактивном ШД полный период изменения магнитного поля в
воздушном зазоре соответствует повороту ротора относительно статора на
одно зубцовое деление. Это значит, что зубец и паз ротора эквивалентны