Арменский Е.В., Фалк Г.Б. ??Электромеханические устройства автоматики
Подождите немного. Документ загружается.


–111–
паре полюсов и занимают электрический угол 360°, т.е. Z
р
= р
м
и
электрический шаг можно определять по (3.17).
Сравнение выражений (3.19) и (3.20) показывает, что при одинаковом
числе полюсных выступов на роторе шаг реактивного ШД в два раза
меньше, чем активного. Кроме того, при одинаковом диаметре ротора в
соответствии с технологическими особенностями у реактивного ШД
можно выполнять значительно больше зубцов, чем полюсов постоянных
магнитов
у ШД активного типа. Поэтому у реактивных ШД шаг достигает
нескольких градусов или долей градуса.
Индукторные двигатели. Индукторные ШД отличаются от
рассмотренных реактивных тем, что в них применяется подмагничивание
ротора (электромагнитное или постоянными магнитами). Постоянный
поток подмагничивания возбуждается со стороны статора или ротора.
Рис. 3.23
На рис. 3.23, а показана конструктивная схема двухпакетного
индукторного ШД. В корпусе 2 расположены два магнитопровода статора
3 с общими обмотками управления 4. Два магнитопровода ротора 6
насажены на общий вал 5 и подмагничиваются постоянным магнитом 1,
имеющим аксиальную намагниченность. Конструкция правого и левого
комплектов магнитопроводов статора и ротора не отличается в
отдельности от конструкции
реактивного редукторного ШД, показанной на
рис. 3.22. При этом магнитопроводы ротора 4 посажены на вал со сдвигом
по углу на половину зубцового деления, т.е. электрический угол 180°. В
результате магнитное сопротивление потоку подмагничивания
п
Φ не
зависит от углового положения ротора.

–112–
Поток подмагничивания
п
Φ
вдоль всей окружности ротора имеет
одинаковое направление: в левом комплекте — от ротора к статору, в
правом — от статора к ротору. Это наглядно видно на рис. 3.23,б,
представляющем собой поперечный разрез левого магнитопровода ротора.
Для упрощения принято, что на роторе четыре зубца, в реальных
двигателях их значительно больше.
Поскольку поверхности статора и
ротора зубчатые, магнитное
сопротивление потоку
п
Φ
в разных точках окружности ротора разное.
Следовательно, индукция
п
В
потока подмагничивания зависит от угла
Θ
,
отсчитываемого вдоль окружности. Индукцию
п
В
можно представить в
виде двух составляющих: постоянной
пост п.
B
и переменной
пер п.
B
.
Переменная составляющая
пер п.
B
превращает магнитопровод ротора в
некоторый эквивалентный постоянный магнит с числом пар полюсов,
равным числу зубцов ротора
р
z
. Процесс возникновения
электромагнитного S момента, обусловленного взаимодействием
переменной составляющей потока подмагничивания с полюсами статора,
такой же, как в двигателях активного типа.
Шаг индукторного ШД, как и реактивного, определяется формулой
(3.20). По сравнению с реактивными ШД при одинаковом шаге
увеличивается синхронизирующий момент, улучшаются энергетические и
динамические характеристики.
Линейные шаговые двигатели. Линейные шаговые двигатели
(ЛШД) преобразуют импульсную команду непосредственно в линейное
перемещение. Это позволяет значительно упрощать кинематическую
схему ряда электроприводов, устраняя механические преобразователи
вращательного движения в поступательное.
Однокоординатный ЛШД можно представить как развернутный на
плоскости ШД вращательного типа.

–113–
Рис.3.24
На рис. 3.24,а показана схема магнитной системы двухфазного
однокоординатного ЛШД индукторного типа. Ротор ЛШД (подвижная
часть), называемый иногда позиционером, выполнен в виде двух П-
образных магнитопроводов 2 из электротехнической стали, которые
подмагничиваются постоянным магнитом 3. На каждом из
магнитопроводов ротора расположено по обмотке управления 1. Статор 4
представляет собой плиту из магнитомягкого материала
; поверхность
плиты, обращенная к ротору, зубчатая.
Поверхность полюсов ротора I—IV также зубчатая. Зубцовые
деления
z
τ
ротора и статора равны. Зубцы двух полюсов в пределах одного
магнитопровода ротора сдвинуты по отношению к зубцам статора на
1
/
2
зубцового деления, одного магнитопровода по отношению к другому — на
1
/
4
зубцового деления. В результате зубцы всех полюсов ротора по-разному
ориентированы относительно зубцов статора, но магнитное сопротивление
потоку подмагничивания не зависит от перемещения якоря.
Принцип работы такого ЛШД не отличается от принципа работы
рассмотренного выше индукторного ШД вращательного типа. В
зависимости от наличия и знака импульса в обмотках управления
максимум
магнитного поля перемещается от полюса к полюсу ротора,
например, по схеме I—III—II—IV. Синхронизирующая сила
с
F
перемещает ротор в такое положение, чтобы против зубцов данного
полюса ротора находились зубцы статора, т.е. на
41
зубцового деления.
В общем случае линейный механический шаг
ткzш
/Kx
τ
=Δ
.
Поскольку в индукторных ШД и ЛШД зубцовое деление является
–114–
двойным полюсным делением, то электрический угловой шаг,
соответствующий
ш
x
Δ
, будет равен
./K360)/x(360
ткш
oo
=Δ=
zшэ
τα
По аналогии можно утверждать, что в общем случае электрический
угол
э
Θ связан с механическим перемещением
мех
x соотношением
)./(360
zмехэ
τ
x
o
=Θ
(3.21)
В многокоординатном ЛШД осуществлено механическое
объединение электромагнитных систем, обеспечивающих перемещение по
нескольким координатам. При этом рассмотренные выше
однокоординатные ЛШД являются электромагнитными модулями,
обеспечивающими перемещение по каждой из координат.
В настоящее время из многокоординатных ЛШД наиболее
распространен двухкоординатный (X, Y) ЛШД с плоским воздушным
зазором. На рис. 3.24,б показана схема конструкции двухкоординатного
ЛШД
индукторного типа. Статор 1 представляет собой плиту из
магнитомягкого металла, на рабочей поверхности которой выполнены две
системы взаимно перпендикулярных зубцов. Ротор 2 содержит две
системы электромагнитных модулей для перемещения по двум
координатам. Электромагнитные модули ротора 4, предназначенные для
перемещения ротора по оси Y, имеют на поверхности, обращенной к
статору, зубцы вдоль оси X. Электромагнитные модули 3,
предназначенные
для перемещения по оси X, имеют зубцы вдоль оси Y.
Принцип коммутации обмоток управления и принцип работы по каждой из
координат такие же, как и у однокоординатного ЛШД.
В линейных ЛШД применяют магнитно-воздушную подвеску. Ротор
притягивается к статору силами магнитного притяжения полюсов ротора.
Через специальные форсунки под ротор нагнетается сжатый воздух,
между
ротором и статором возникает воздушная подушка, и ротор подвешивается
над статором с минимальным воздушным зазором. При этом
обеспечивается близкое к нулю сопротивление движению ротора и
высокая точность позиционирования.
В заключение следует отметить, что на базе ШД и ЛШД могут быть
созданы двух-,трех- и четырехкоординатные двигатели, осуществляющие
сложные перемещения в
декартовой, цилиндрической и сферической
системах координат, что имеет большое значение при создании
промышленных роботов.
§ 3.5. Режимы работы и характеристики шаговых двигателей
Режимы работы и характеристики шаговых двигателей рассмотрены в
данном разделе на примере вращающегося ШД. Однако все основные
положения справедливы и для линейного шагового двигателя с заменой
моментов на силы и определением электрических углов по формуле (3.21).
–115–
Работу ШД считают устойчивой, если он работает без потерь шага,
т.е. ротор занимает устойчивое положение, соответствующее положению
вектора результирующей МДС статора, при каждом шаге вектора МДС.
Режим работы ШД в значительной мере определяется частотой
управляющих импульсов f.
Статический режим (f = 0) соответствует прохождению
постоянного тока по обмоткам управления, создающим неподвижное
магнитное поле. Основной характеристикой этого режима является
зависимость статического синхронизирующего момента
c
М
от
электрического угла рассогласования
э
γ
между продольной осью ротора и
МДС статора. Продольная ось ротора совпадает с направлением потока
ротора в ШД активного типа и с направлением наименьшего магнитного
сопротивления в реактивных и индукторных ШД. Как известно из теории
синхронных двигателей (§ 3.1), зависимость
c
М
периодическая. Основная
гармоника синхронизирующего момента
),(sin Мsin М М
э21эmax cэmax cc
Θ
−
Θ
=
=
γ
(3.22)
где
max c
М
— максимальный синхронизирующий момент;
э1
Θ ,
э2
Θ
—
электрические углы поворота МДС статора и оси ротора.
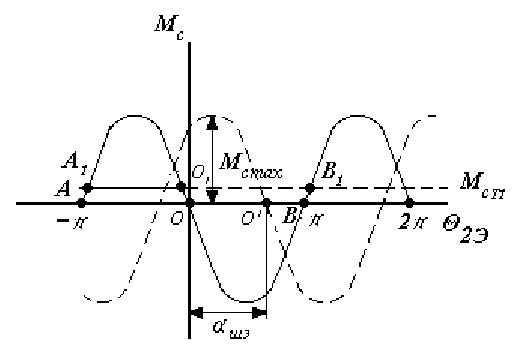
Рис 3.25.
На рис. 3.25 показана зависимость (сплошная линия) момента от угла
поворота ротора
э2
Θ
при фиксированном положении поля статора
,0
э1
=Θ
когда
э2э
Θ−
=
γ
.
Зоной статической устойчивости
су
Θ
является окрестность точки
устойчивого равновесия на угловой характеристике, из любой точки
которой после снятия возмущающего воздействия ротор возвращается в
исходную точку устойчивого равновесия. При статическом моменте
–116–
сопротивления
0М
ст
=
точка устойчивого равновесия — 0, точки
неустойчивого равновесия — А, В, т.е. зона статической устойчивости
АОВ симметрична:
)()(
су
π
π
+
÷
−=Θ
. В случае наличия нагрузки
0М
ст
≠
зона статической устойчивости становится несимметричной, например
111
BOA
при
0М
ст1
>
.
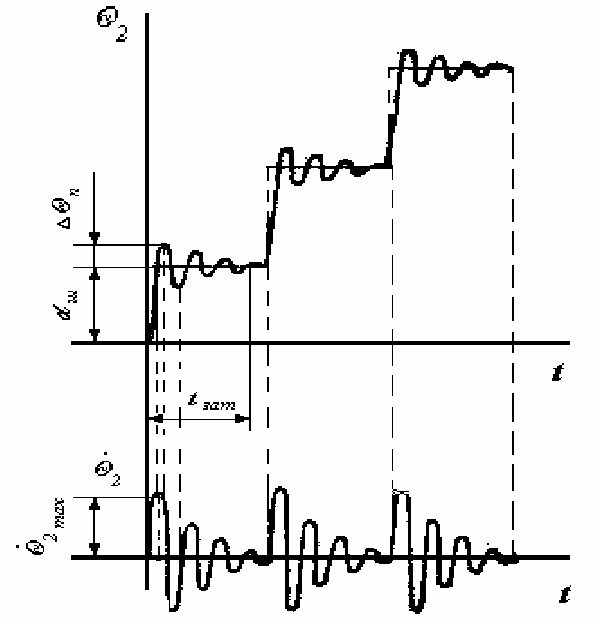
Режим отработки единичных шагов соответствует частоте
управляющих импульсов, при которой переходный процесс, чаще всего
колебательный, на каждом шаге заканчивается к началу следующего шага,
.
т.е. угловая скорость ротора
2
Θ
в начале каждого шага равна нулю
(рис. 3.26).
Рис.3.26
В момент времени
α
t ротор переместился на один шаг, однако он
.
имеет максимальную скорость
max 2
Θ
и кинетическую энергию и
продолжает перемещаться против сил поля. Начинается процесс
свободных колебаний (качаний) ротора относительно положения
устойчивого равновесия, как у всех синхронных микродвигателей (см.
§ 3.2). Колебания затухают, когда вся кинетическая энергия израсходована

–117–
на электрические, магнитные и механические потери, вызванные этим
процессом. Амплитуда и время затухания колебаний тем меньше, чем
больше эти потери.
Основными показателями режима отработки единичных шагов
являются перерегулирование
п
Δ
Θ
, т.е. максимальное отклонение от
нового положения устойчивого равновесия ротора при переходном
процессе; максимальное значение мгновенной скорости ротора
max 2
•
Θ
в
процессе шага; время затухания свободных колебаний ротора на одном
шаге
зат
t
.
У шаговых двигателей желательно уменьшать
п
ΔΘ
и
зат
t
при
сохранении необходимой мгновенной угловой скорости ротора
2
•
Θ
.
Установившийся режим работы шаговых двигателей соответствует
постоянной частоте управляющих импульсов, причем
зат
t
больше времени
одного такта коммутации.
В установившемся режиме вращение ротора с некоторой средней
угловой скоростью
ш2
180
α
π
ω
f=
(3.23)
сопровождается вынужденными колебаниями относительно мгновенной
точки устойчивого равновесия. Амплитуда колебаний достигает
наибольшего значения при частоте управляющих импульсов, совпадающей
с резонансной — собственной частотой ротора.
Если время электромагнитных переходных процессов значительно
меньше, чем механических, движение ротора ненагруженного ШД
математически можно описать уравнением равновесия моментов:
,ММММ
тдемдинc
+
+
=
(3.24)
где
дин
М
— динамический момент сопротивления;
дем
М
—
демпфирующий электромагнитный момент;
т
М
— момент трения.
Динамический момент определяется моментом инерции ротора J и
ускорением:
.М
2
э2
2
м
2
2
2
дин
dt
d
P
J
dt
d
J
Θ
=
Θ
=
(3.25)
Внутренне электромагнитное демпфирование колебаний ротора
обеспечивается за счет наведения ЭДС вращения в обмотках управления.
В ШД активного типа ЭДС вращения наводится потоком возбуждения
ротора, в индукторных и реактивных ШД — переменной составляющей

–118–
потока возбуждения, возникающей в результате изменения магнитного
сопротивления при вращении ротора. ЭДС вращения вызывает в цепи
обмоток управления дополнительные токи, которые во взаимодействии с
вызвавшим их потоком создают демпфирующий момент, препятствующий
изменению угловой скорости ротора. Значение демпфирующего момента
пропорционально угловой скорости ротора:
td
М
э2
дем
Θ
=
d
D
, (3.26)
где D — коэффициент демпфирования.
Наибольший коэффициент демпфирования у ШД активного типа, у
реактивных двигателей он близок к нулю.
Если пренебречь моментом трения
т
М
и рассматривать работу ШД
при малых углах рассогласования осей ротора и МДС статора
)(sin
γ
γ
≈ , то
подставив (3.22), (3.25) и (3.26) в (3.24), получим дифференциальное
уравнение движения ротора:
.
МM
э1
мmax с
э2
мmax сэ2м
2
э2
2
Θ=Θ+
Θ
+
Θ
J
P
J
P
dt
d
J
DP
dt
d
(3.27)
В выражении (3.27) коэффициент при
2э
Θ
есть квадрат угловой частоты
собственных колебаний ротора (рад/с):
/JМ
мmax с0
р=
ω
. Частота
управляющих импульсов, соответствующая главному резонансу,
π
ω
2/
00
=f
.
Важной характеристикой установившегося режима является
предельная механическая характеристика — зависимость предельного
вращающего момента шагового двигателя
пред
М
от частоты управляющих
импульсов (рис. 3.27,а).
Рис. 3.27
–119–
Она определяет тот предел, до которого при данной частоте управляющих
импульсов можно плавно нагружать вал ШД, сохраняя при этом
синхронный режим. Предельную механическую характеристику
рассматривают обычно при
0
ff >
.
С увеличением частоты происходит уменьшение вращающего
момента ШД, что объясняется в основном двумя факторами: действием
демпфирующего момента от ЭДС вращения и тем, что ЭДС самоиндукции
в обмотках управления становится соизмеримой с напряжением источника
питания и ток в обмотках управления за время такта не успевает нарастать
до установившегося значения, что снижает
результирующий поток
статора. Снижение синхронизирующего момента тем резче, чем больше
электромагнитная постоянная времени обмоток управления.
Переходные режимы — пуск, торможение, реверсирование, переход
с одной частоты на другую — сопровождаются переходными процессами в
ШД, вызванными изменением частоты управляющих импульсов и угловой
скорости ротора.
Важным показателем переходного режима является приемистость
ШД — наибольшая частота управляющих импульсов
дв ш.
f
,
отрабатываемых шаговым электродвигателем без потери шагов при пуске
из состояния фиксированной стоянки под током.
Скачкообразное увеличение частоты управляющих импульсов при
пуске от нуля до рабочей частоты приводит к тому, что в начале ротор
отстает от МДС статора под действием момента инерции вращающихся
частей. По мере ускорения он достигает угловой скорости
МДС статора и
за счет запасенной кинетической энергии может опередить МДС.
Постепенно колебания затухают и двигатель переходит в установившийся
режим. Таким образом, в процессе пуска может возникнуть расхождение
между числом шагов ротора и МДС статора. Приемистость растет с
увеличением синхронизирующего момента, а также с уменьшением шага и
момента инерции вращающихся частей
; момент трения отрицательно
влияет на приемистость (рис. 3.27, б).
С целью повышения приемистости при пуске ШД может
применяться форсировка. В современных схемах форсировка часто
производится модуляцией амплитуды импульса напряжения на обмотках
управления. В начальный момент подачи импульса амплитуда напряжения
с помощью специального регулятора устанавливается завышенной. Ток,
нарастая по экспоненте с повышенным
установившимся значением,
достигает номинального значения за более короткий отрезок времени; в
этот момент времени напряжение снижается до номинального. Указанный
регулятор должен функционировать с частотой коммутации обмоток.
–120–
Предельная частота торможения из установившегося режима вращения
несколько выше предельной частоты пуска, поскольку, в частности,
момент трения на валу двигателя способствует торможению. Предельная
частота реверса на 30—40% ниже предельной частоты пуска.