Арменский Е.В., Фалк Г.Б. ??Электромеханические устройства автоматики
Подождите немного. Документ загружается.


–51–
(рис.2.15, б; ключ К
1
– разомкнут, К
2
– замкнут). Возникает неподвижное
поле статора, которое наводит ЭДС и токи во вращающемся роторе. В
результате взаимодействия этих токов с полем статора создается
тормозной момент. Механические характеристики в режиме
динамического торможения расположены во II квадранте (кривые 2 и 3 на
рис.2.15,в) и похожи на механическую характеристику в режиме двигателя
(кривая I). В отличие от
режима двигателя максимальный момент
наступает при тем большей угловой скорости ротора чем больше активное
сопротивление ротора. В момент переключения питания двигатель
переходит из точки А характеристики I в точку B характеристики 2,
электромагнитный момент меняет знак и начинается интенсивное
динамическое торможение, заканчивающееся в точке 0.
У двигателей с контактными кольцами в момент переключения в
цепь ротора включается добавочное активное сопротивление R
д
для
повышения начального тормозного момента (переход в точку С ) и
снижения токов.
§ 2.6. Регулирование угловой скорости трехфазных асинхронных
двигателей
Трехфазные асинхронные двигатели используют в основном в
приводах, не требующих широкого регулирования угловой скорости ротора.
Однако в последнее время расширяется применение этих дешевых и
надежных двигателей и в регулируемом электроприводе, в
том числе в
станках с числовым программным управлением. Основные способы
регулирования угловой скорости ротора основаны на изменении скорости
поля за счет изменения частоты напряжения питания или числа полюсов,
т.к.
ω
2
=(1−s)ω
1
=(1-s)(2πf
1
/p
м
). (2.32)
Регулирование возможно также за счет изменения амплитуды
напряжения питания, а у двигателей с контактными кольцами – изменения
добавочного сопротивления в цепи ротора.
Регулирование переключением числа полюсов.
Изменение числа
пар полюсов р
м
позволяет дискретно регулировать ω
2
. Для реализации
этого способа требуется либо укладывать на статоре несколько обмоток с
различным р
м
, либо выполнять одну обмотку из секций, выведенных на
коммутатор. Переключая секции, можно получать различное число
полюсов обмотки. В обоих случаях возрастают габариты, масса и
стоимость, усложняется конструкция многоскоростных двигателей по
сравнению с нормальными. Основным недостатком способа регулирования
является ступенчатый характер изменения угловой скорости, число
ступеней скорости не превышает 3 ÷ 4. Диапазон
регулирования не
превышает D = 4:1. Способ применяется только у двигателей с коротко

–52–
замкнутым ротором, у которых число полюсов ротора автоматически
становится равным числу полюсов обмотки статора.
Регулирование изменением частоты напряжения питания
(частотное управление). У трехфазных асинхронных двигателей наиболее
перспективным способом плавного регулирования является изменение
частоты напряжения питания f
1
(cм. 2.32).При этом следует иметь ввиду,
что для наилучшего использования двигателя изменение частоты должно
сопровождаться изменением амплитуды напряжения питания. Объясняется
это тем, что в соответствии с (1.5) при неизменной амплитуде напряжения
и регулировании частоты изменяется магнитный поток машины
Ф
m
=U
1
/(4,44f
1
w
1.эф
). Уменьшение f
1
вызовет увеличение Ф
m
, что может
привести к насыщению магнитопровода, резкому возрастанию
намагничивающего тока и перегреву как стали, так и обмоток статора.
Увеличение f
1
приводит к уменьшению Ф
m
, что при Мст=const в
соответствии с (2.24) вызовет рост тока в роторе и, соответственно,
перегрев ротора при недоиспользовании стали.
Закон изменения напряжения зависит от изменения частоты питания
и характера нагрузки. Если статический момент нагрузки М
ст
не зависит от
скорости, то необходимо при регулировании частоты f
1
так изменять
напряжение U
1
, чтобы
U
1
/f
1
= const. (2.33)
Если же статический момент нагрузки обратно пропорционален скорости и
мощность нагрузки М
ст
ω
2
= const, то соотношение U
1
и f
1
должно иметь
следующий вид: U
1
/(f
1
)
1/2
=const.
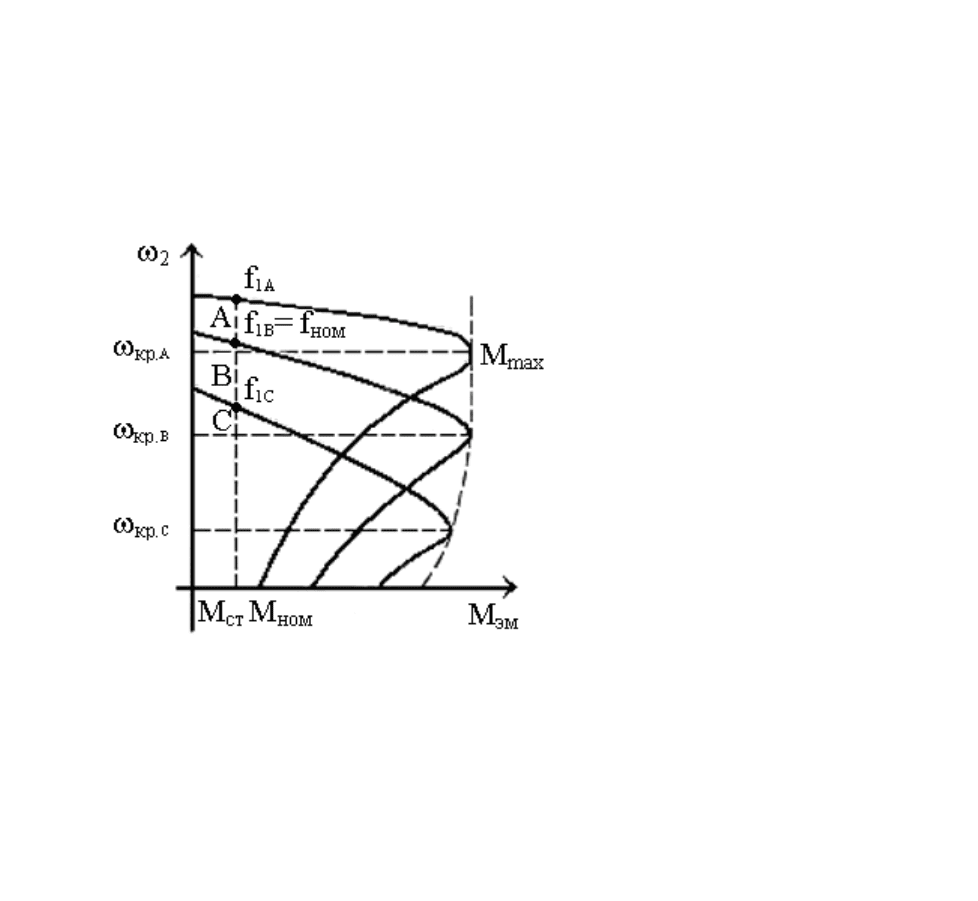
На рис. 2.16 приведено семейство механических характеристик при
изменении частоты и амплитуды напряжения в соответствии с
выражением (2.33).
–53–
Рис.2.16
Как видно, с изменением частоты напряжения питания ( f
1a
>f
1b
>f
1c
)
при неизменном моменте Мном угловая скорость ротора ( ω
2a
> ω
2b
> ω
2c
)
изменяется в широком диапазоне практически пропорционально частоте.
С уменьшением частоты критическая угловая скорость уменьшается,
максимальный момент в области высоких и средних частот остается
неизменным, а в области малых частот несколько уменьшается. При этом в
широком диапазоне сохраняется перегрузочная способность двигателя
Мmax / Мном.
Частотный способ позволяет устанавливать угловую скорость выше
и
ниже номинальной. Увеличение угловой скорости допускается (в
основном из условий механической прочности) в I,5-2 раза больше
номинальной. Нижний предел скорости ограничен тем, что технически
сложно получить источники питания с низкой частотой, а также добиться

–54–
достаточно равномерного вращения ротора двигателя. В разомкнутом
приводе частотный способ управления позволяет изменять угловую
скорость в диапазоне D = (20 - 30):1; в замкнутом приводе диапазон может
быть существенно расширен с помощью обратных связей по скорости,
току и напряжению.
Препятствием для широкого внедрения частотного способа является
сложность и весьма высокая стоимость полупроводниковых
преобразователей частоты. Схема и
алгоритмы управления таким
приводом получаются более сложными, чем приводом постоянного тока,
так как управлять приходится сразу двумя взаимосвязанными величинами:
частотой напряжения и магнитным потоком - при существенно
нелинейных характеристиках.
Однако асинхронные двигатели с короткозамкнутым ротором
благодаря отсутствию скользящего контакта являются более надежными и
требуют меньше ухода в эксплуатации, чем коллекторные двигатели
постоянного тока. При одинаковой мощности их стоимость в несколько
раз меньше. Поэтому создание регулируемых асинхронных приводов с
частотным управлением в целом ряде случаев является перспективным.
Регулирование изменением напряжения питания.
В принципе
такое регулирование возможно, однако используется очень редко.
Объясняется это тем, что при малом S
кp
, характерном для двигателей
обычного исполнения, диапазон регулирования ω
1
- ω
2кр
очень узок.
Регулирование изменением сопротивления в цепи ротора.
Реостатный и импульсный способы регулирования, основанные на
изменении добавочного активного сопротивления реостата R
д
,
включаемого в цепь ротора двигателя с контактными кольцами,
реализуются практически по тем же схемам, что и соответствующие
способы пуска (см. § 2.5, рис. 2.13 и 2.14 ). Снижение жесткости
механических характеристик при увеличении активного сопротивления в
цепи ротора ограничивает диапазон регулирования до D = (2 - 3):1.
Существенным недостатком являются также значительные потери
мощности в цепи ротора, т.к. в
процессе регулирования сильно растет
скольжение.
§2.7. Исполнительные асинхронные микродвигатели. Конструкция и
принцип управления.
Исполнительными называются электрические двигатели,
преобразующие электрический сигнал в пропорциональную ему угловую
(линейную) скорость ротора.
Основные требования, предъявляемые к исполнительным
двигателям: линейность механических характеристик и обеспечение
устойчивой работы во всем рабочем диапазоне скоростей; линейность
регулировочных характеристик и широкий
диапазон регулирования

–55–
угловой скорости (регулировочная характеристика – это зависимость
угловой скорости от электрического сигнала управления); отсутствие
самохода (явление самохода состоит в том, что двигатель развивает
вращающий момент и его ротор вращается при отсутствии сигнала
управления); высокое быстродействие.
Кроме этого, к исполнительным двигателям предъявляется ряд
требований, зависящих от области применения.
В качестве исполнительных асинхронных микродвигателей
в
большинстве случаев используют двухфазные микродвигатели.
Конструкция.
На статоре исполнительных микродвигателей
имеются две обмотки, сдвинутые в пространстве на угол γ; у большинства
двигателей электрический угол γ
э
= 90°. Число витков в обмотках
возбуждения В и управления У в общем случае разное.
По сравнению с трехфазными асинхронными двигателями общего
применения исполнительные асинхронные микродвигатели имеют
повышенное активное сопротивление ротора. Это связано с требованием
устойчивой работы исполнительных микродвигателей во всем рабочем
диапазоне угловых скоростей (s = 0÷1). Поскольку устойчивая работа
асинхронных машин
практически при всех видах нагрузки обеспечивается
только на участке s=0÷s
кр,
активное сопротивление ротора у
исполнительного асинхронного микродвигателя должно быть таким, чтобы
обеспечивалось условие s
кр
≥ 1. У реальных исполнительных асинхронных
микродвигателей обычно s
кр
= 2÷4.
В зависимости от конструкции ротора различают три основных типа
исполнительных асинхронных микродвигателей: с короткозамкнутым
ротором типа “беличья клетка”, с полым немагнитным и полым
ферромагнитным роторами; из них в схемах автоматики используются в
основном двигатели первых двух типов.
Асинхронные двухфазные микромашины с ротором типа “беличья
клетка”, используемые в качестве исполнительных
микродвигателей,
имеют такую же конструкцию, как трехфазный асинхронный двигатель с
аналогичным ротором (см. §2.2). Современная технология позволяет
изготавливать такие микродвигатели с очень небольшим воздушным
зазором порядка 0,03 ÷0,05 мм и, соответственно, высокими
энергетическими показателями.
–56–
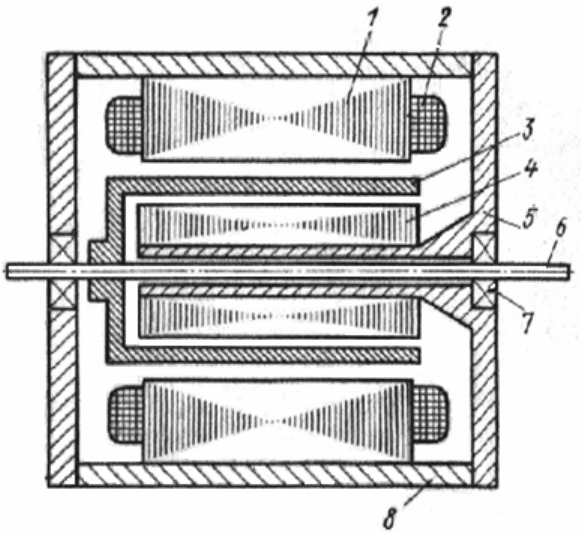
Рис. 2.17
В асинхронном микродвигателе с полым немагнитным ротором (рис.
2.17) внешний статор 1, закрепленный в корпусе 8, ничем не отличается от
статора обычного асинхронного микродвигателя. В пазах магнитопровода
статора располагают две обмотки 2 – возбуждения и управления,
сдвинутые в пространстве на 90°. Внутренний статор 4, который набирают
из листов электротехнической стали на цилиндрическом выступе 5 одного
из подшипниковых щитов, служит для уменьшения магнитного
сопротивления на пути основного магнитного потока, проходящего через
воздушный зазор.
В микромашинах мощностью в единицы ватт и менее обмотки
возбуждения и управления часто размещают в пазах внутреннего статора.
В воздушном зазоре между внешним и внутренним статорами
находится полый ротор 3, выполненный в виде тонкостенного стакана
из
немагнитного материала, чаще всего из сплавов алюминия. Дно ротора
жестко укрепляют на валу 6, который вращается в подшипниках 7,
расположенных в подшипниковых щитах. Толщина стенок ротора в
зависимости от мощности двигателя колеблется в пределах 0,2 – 1 мм. В
полом немагнитном роторе наводятся ЭДС и протекают токи: в результате
взаимодействия этих токов с полем
статора возникает электромагнитный
момент двигателя.
Полый ротор имеет очень малую массу и, следовательно,
незначительный момент инерции. В отличие от роторов других типов
обладает незначительным индуктивным сопротивлением рассеяния, что

–57–
повышает линейность характеристик двигателя. Гладкая цилиндрическая
поверхность полого немагнитного ротора способствует снижению уровня
шумов, создаваемых двигателем. Отсутствие радиальных сил притяжения
полого немагнитного ротора к статору и уменьшение массы ротора,
соответственно момента трения в подшипниках, обеспечивают
уменьшение напряжения трогания.
Недостатком микромашин с полым немагнитным ротором является
большой немагнитный зазор, состоящий из двух
зазоров: между внешним
статором и ротором и ротором и внутренним статором (каждый до 0,25
мм), а также из немагнитной стенки самого ротора. Из-за большого
немагнитного зазора между внешним и внутренним статорами, который
составляет 0,5÷1,5 мм, эти машины имеют значительный
намагничивающий ток (0,8÷0,9 номинального) и низкий коэффициент
мощности. Большой намагничивающий ток
приводит к большим
электрическим потерям в обмотках двигателя и значительно снижает его
КПД. У исполнительных микродвигателей с полым немагнитным ротором
мощностью в несколько десятков ватт по сравнению с исполнительными
микродвигателями той же мощности с ротором типа “беличьей клетки”
при частоте 50 Гц КПД снижается с40÷50% до 20÷35%, а габариты и масса
увеличиваются в 1,2÷2 раза. При увеличении номинальной частоты
напряжения питания до 400÷1000 Гц габариты и масса на единицу
полезной мощности уменьшаются и эти показатели у указанных типов
микродвигателей сближаются. Объясняется это относительным
уменьшением активного сопротивления обмоток статора (по сравнению с
индуктивным) и электрических потерь в них.
Микромашины с полым немагнитным
ротором менее надежны при
высоких температурах, вибрации и ударах, так как вероятность
деформации полого немагнитного ротора в указанных условиях выше, чем
ротора типа “беличьей клетки”. В каждом конкретном случае выбор
конструктивного типа двигателя должен определяться с учетом основных
требований и условий применения.
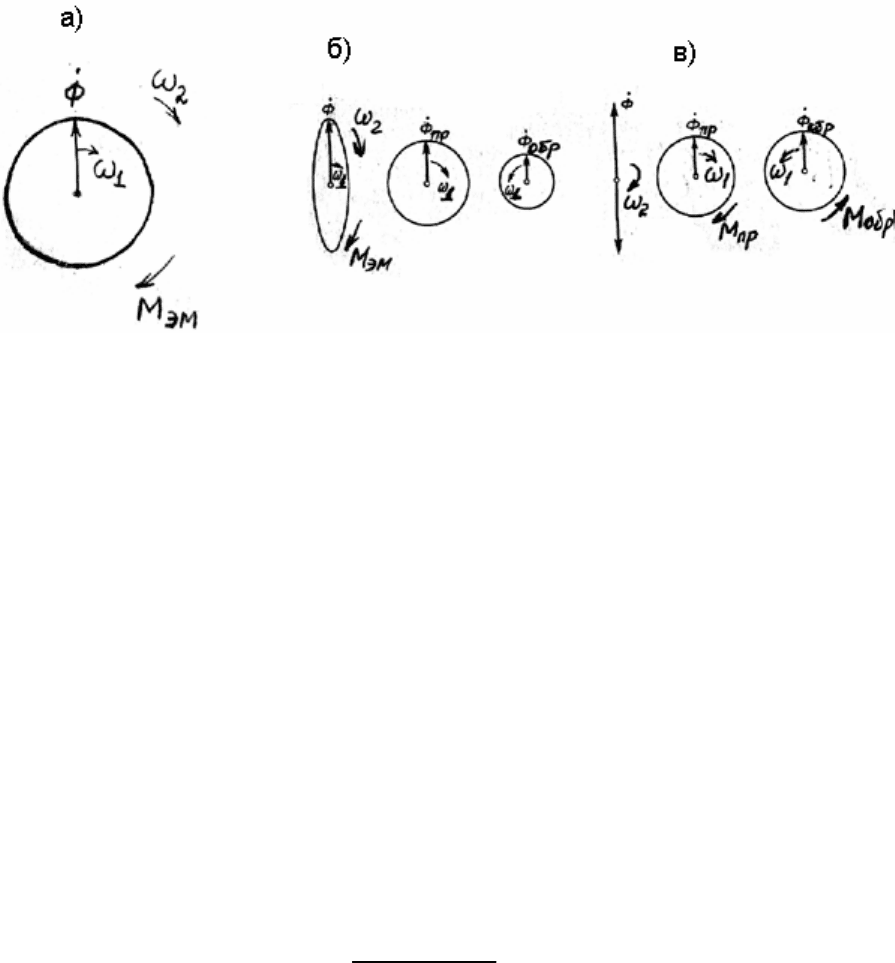
Форма поля.
Вращающееся магнитное поле статора, создаваемое в
результате взаимодействия МДС обмоток В и У является круговым (рис.
2.18,а) при соблюдении условий (2.4), т.е. γ
э
= 90°, β = 90° и I
y
w
yэф
= I
в
w
вэф.
–58–
Рис. 2.18
Нарушение любого из этих условий приводит к тому, что суммарное
магнитное поле Ф при вращении не остается постоянным и конец вектора
магнитного потока описывает не окружность, а эллипс. Можно показать,
что эллиптическое поле создает меньший вращающий момент, чем
круговое такой же амплитуды. Для этого условно представим
эллиптическое поле в
виде суммы двух неравных по значению круговых
полей, вращающихся с синхронной угловой скоростью в
противоположные стороны (рис. 2.18,б). Круговое поле Ф
пр
, вращающееся
в одном направлении с эллиптическим, называют прямым; второе поле
Ф
обр
именуют обратным. Простые геометрические построения показывают,
что такая замена справедлива, если сумма Ф
пр
и Ф
обр
будет равна большой
полуоси эллипса, а разность – малой полуоси эллипса. Скольжение ротора
относительно поля обратной последовательности
s
обр
=
1
21
ω
ω
ω
−
−
−
= 2 – s. (2.34)
Прямое поле создает вращающий момент двигателя, а обратное –
тормозящий момент. С увеличением эллиптичности поля за счет
изменения углов β и γ или уменьшения МДС одной из обмоток статора
прямая составляющая поля и момента убывает, а обратная составляющая
растет. Уменьшение результирующего момента при неизменном моменте
нагрузки приводит к снижению угловой скорости
ротора.
Когда полностью не выполняется хотя бы одно из условий кругового
поля, т.е. β = 0, или γ = 0, или I
в
= 0, или I
у
= 0, поле статора становится
пульсирующим и двигатель не развивает вращающего момента при
неподвижном роторе. Для объяснения этого явления заменим
пульсирующее магнитное поле Ф (рис. 2.18,в) двумя полями Ф
пр
и Ф
обр,

–59–
вращающимися в противоположные стороны с синхронной угловой
скоростью и имеющими амплитуды, равные половине амплитуды
пульсирующего поля.
При неподвижном роторе оба поля вращаются относительно ротора с
синхронной угловой скоростью. Каждый из них наводит в обмотке ротора
токи, равные по амплитуде вследствие равенства полей и скольжений.
Возникают равные по модулю вращающие моменты, направление
которых
противоположно, как и направление полей. Результирующий момент равен
нулю, и ротор во вращение прийти не может.
Картина несколько меняется, если поле статора становится
пульсирующим при вращении ротора. В этом случае двигатель продолжает
развивать электромагнитный момент, так как скольжение относительно
прямого и обратного полей уже неодинаковое. Этот момент будет
положительным (
вращающим) или отрицательным (тормозным) в
зависимости от параметров двигателя. При s
кр
< 1 электромагнитный
момент пульсирующего поля положительный практически во всем
рабочем диапазоне скоростей. Поле статора в исполнительном
асинхронном микродвигателе становится пульсирующим при снятии
сигнала управления. Следовательно, ротор двигателя может продолжать
вращаться при снятом сигнале управления. Это явление, называемое
параметрическим самоходом, недопустимо для исполнительных
двигателей.
При s
кр
≥ 1 электромагнитный момент пульсирующего поля
отрицательный во всем рабочем диапазоне скоростей, и при снятии
сигнала управления ротор обязательно останавливается. Это является
второй причиной изготовления исполнительных асинхронных
микродвигателей c s
кр
> 1.
§ 2.8. Способы управления и характеристики исполнительных
асинхронных микродвигателей
Для управления исполнительными асинхронными микродвигателями
применяют в основном несимметричные способы, т.е. основанные на
изменении формы вращающегося магнитного поля: амплитудный
(изменение U
y
), фазовый (изменение β) и пространственный (изменение γ,
применяется редко). Возможна комбинация этих способов.
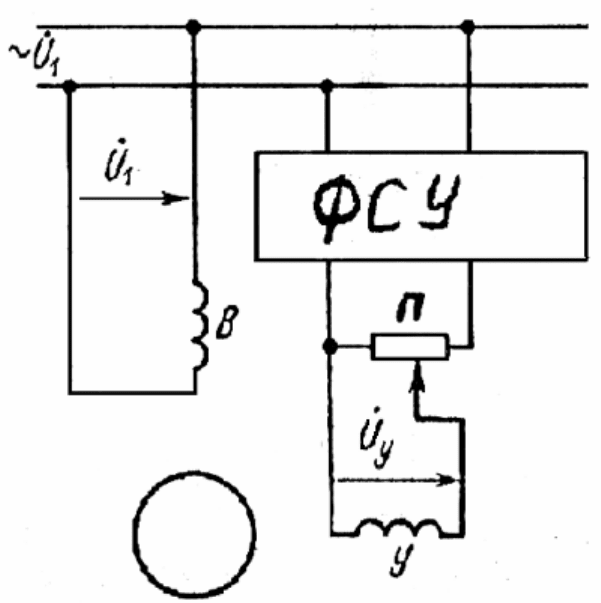
Способы управления.
При амплитудном способе управления (рис.
2.19) обмотку возбуждения В подключают к сети переменного тока с
номинальным напряжением U
1
. На обмотку управления У подается сигнал
– напряжение управления U
y
, сдвинутое по фазе относительно U
1
на угол
90° с помощью фазосдвигающего устройства ФСУ. Управление угловой
скоростью ротора осуществляется изменением с помощью потенциометра
П амплитуды напряжения управления при неизменной его фазе.
–60–
Рис. 2.19
Равенство МДС обмоток возбуждения и управления имеет место при
равенстве напряжений, приведенных к одному числу витков. Если
приведение осуществить к обмотке возбуждения, то равенство МДС
эквивалентно условию U′
y
=U
1
, где U′
y
=К
т
U
y
, а коэффициент
трансформации обмоток статора К
т
= w
вэф
/ w
уэф
. При равенстве
приведенных напряжений эффективный коэффициент сигнала
α
эф
=U′
y
/U
1
=αК
т
равен 1 и поле статора круговое
(α = U
y
/ U
1
- коэффициент сигнала при амплитудном управлении). С
изменением напряжения управления эффективный коэффициент сигнала
становится отличным от единицы, а поле – эллиптическим. При α
эф
= 0
поле статора пульсирующее.
При фазовом способе управления (рис. 2.19) на обмотку управления
У подается номинальное напряжение. Номинальным называют такое
напряжение управления, которое соответствует равенству U′
y
= U
1
.
Управление угловой скоростью ротора осуществляется изменением с
помощью ФСУ фазы напряжения управления (угла β). За коэффициент