Аракелян А.К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. Том 2
Подождите немного. Документ загружается.

345
344
20.3. Использование мощности синхронной машины в схеме
вентильного двигателя
При использовании синхронного двигателя в системе ВД с
инвертором тока и при условии реализации естественной
коммутации вентилей либо искусственной коммутации без
использования дополнительных накопителей реактивной энергии
кривая тока двигателя имеет форму, близкую к трапецеидальной.
В этом случае целесообразно определить мощность вентильного
двигателя (
BД
P
) за период, то есть среднюю мощность, с учетом
форм кривых напряжения и тока электрической машины в
интервале проводимости вентилей коммутатора [18]:
P E i t d t
E I t d t E i t d t
m K
m m K
BÄ 1
ï 2
6
2
1
2 2
6
1
2 6
2
3
2
3
2
3
sin( )
sin( ) sin( ) ,
(20.9)
где i i
K K1 2
, - токи двигателя в интервале коммутации,
i i i I i
K K K K1 2 ï
; ;
i
K
- ток коммутации вентильного двигателя.
Упрощенное выражение тока коммутации ( i
K
) получается из
известного [20] соотношения при пренебрежении влиянием
активных сопротивлений обмоток якоря и ротора двигателя на
процесс коммутации, что правомерно для квазиустановившегося
режима работы вентильного двигателя. Принимая в начальный
момент времени взаиморасположение временных диаграмм
переменных ВД, приведенных в [18], запишем значение тока
коммутации по окончании коммутации:
i
U
x a
K
m
d
3
2
1
1 1
1
2
1
1
cos( ) cos
sin ( )
Анализ полученного уравнения и построенных на его основе
эквипотенциальных поверхностей в системе координат
E K
m n
, ,
позволяет сделать следующие выводы: при
r r
0 01; ,
и
сечении поверхности плоскостью
i
const на последней
получаются конгруэнтные кривые
E x x
m
d
q i
( , , , )
. При
r
0
эти кривые выходят из точки с координатами (0,
i
, 1), а при
r
0
начальные точки кривых
E K
m i
( , )
n
смещаются вниз, отсекая
на оси
E
m
ординаты меньше 1. При этом величина этого смещения
определяется коэффициентом перегрузки и пропорциональна ей
независимо от степени несимметрии ротора
a a
x
x
q
d
( )
.
Зависимость
E
m
от перегрузки по току, то есть скорость
нарастания сверхпереходной ЭДС, представляет собой кривую
параболической формы, крутизна которой растет с ростом тока
нагрузки, в то время как это изменение от фазы тока выражено
слабо. Сказанное выше указывает на необходимость учета
сверхпереходной ЭДС, а не первой гармоники напряжения
статорной обмотки при оценке уровня изоляции двигателя и выбора
вентилей инвертора.
Следует отметить также, что при отсутствии или пре-
небрежительно малом значении сверхпереходной реактивности по
поперечной оси двигателя (
a
0
) и отстающем по фазе тока
статора значением более 0,5 о.е. для сверхпереходной ЭДС по
(20.8) вещественных значений не существует. Зависимость функции
E
m
от аргумента
2 0
; 30 ; 60
при фиксированных
переменных двигателя дает одинаковые результаты при условии,
что любая комбинация и
соответствует указанным угловым
значениям. Это существенно упрощает расчеты по оптимизации
E
m
.
347
346
При определении средней мощности электрической машины
по (20.11)
1
из-за чередования за один период интервалов
проводимости и коммутации, имеющих равные длительности, и с
учетом того, что в любой момент времени i i I i
K K K1 2 ï
при
t
, становится возможной замена двух интервалов ком-
мутации одним интервалом с током i
K
. Это позволяет
осуществить интегрирование функции напряжения (
E
m
),
действующего на одном (причем любом) интервале коммутации.
После подстановки (20.11) в (20.10) и интегрирования (20.11)
на первом интервале коммутации и в интервале проводимости
получаем:
E
a
A+B+C+D
IEP
m
)(sin+1
)
2
cos(
33
1
2
1
•BД
, (20.12)
где
A =
1
3
cos( ) cos sin( ) sin sin sin
2 2
1
12
2 2
2
;
B a a=
2 3
1 1 1 1
3
2 2 2 1 1
2 2
sin cos (sin ) sin sin( ) sin ;
C a=
4 3
1
2 2
1
2
1
3
cos ( ) sin ;
D a=
2
3
2
2 2 2
1 1
2
cos ( ) cos sin ;
E = cos
2
1
3
2
sin .
Для синхронного двигателя с неявно выраженными полюсами
( a
1
0 )
+E+CA+BIEP
m 11•BД
)
2
cos(
33
, (20.13)
1
Потерями в электрической машине пренебрегаем.
)(sin1
2sin)2(cos1)(2
1
2
1
1
2
1
п
a
a
I
)(sin13
sin)
12
2cos(2
I
1
2
1
11
п
a
a
, (20.10)
где
2
sin
34
)(
1
I
I
m
- коэффициент связи между ам-
плитудой первой гармоники фазного тока якоря и идеально
сглаженным входным током инвертора,
a
x
x
q
d
1
1
.
Представим первую гармонику напряжения якоря двигателя
(U
m1
) сверхпереходной ЭДС и падением напряжения на сверх-
переходных сопротивлениях от тока первой гармоники, пренебрегая
падением напряжения на этих же сопротивлениях от токов высших
гармоник, тогда из уравнения [20]
U E x I x I
m m d d q q1 1 1
sin( ) sin cos
1
,
где
0
t - текущий угол между продольной осью ротора и
осью фазы якоря;
I I
d q1 1
,
- осевые составляющие первой гармоники тока якоря.
Для начального момента времени, когда угловое положение
ротора относительно неподвижной магнитной оси фазы "а" якоря
фиксировано на временных диаграммах (рис. 10.3, а) значением
0 1
2
, получим окончательно
.sin12(sincos2sin
2
1
)(
sin)
2
sin(cos)
2
cos(
1111•
1
tataxI
ttEU
d
mm
(20.11)
349
348
coscos
coscos2cos2
3
2
1
33
2
= II
.(20.16)
В результате уравнение для определения мощности вен-
тильного двигателя примет вид
coscos
coscos2cos2
3
2
1
33
2
6
2)-( cos3
ВД
K
UIP
, (20.17)
где
U E= 2
m
- действующее значение напряжения двигателя;
K
A+ B B C C D
a
E=
( ) + ( ) + (0)
1 +
1 1
1
2
1
sin ( )
.
Таким образом, коэффициент использования синхронного
двигателя с регулируемым возбуждением, применяемого в системе
ВД (без учета добавочных потерь в железе статора, ротора и
токопроводящих обмоток, обусловленных гармоническими тока
нагрузки), как это следует из (20.17), в общем случае зависит от
углов и и определяется соотношением
coscos
coscos2cos2
3
2
1
33
2
)2- ( cos 6
и
K
K
. (20.18)
В целях лучшего использования электрической машины
необходимо угол выбирать минимально возможным, исходя из
условия обеспечения надежной коммутацией тока при максимально
возможных перегрузках. Заменив в (20.18) на + ;
1
на
1
и
1
на
1
2 , получим удобное для расчетов выражение
коэффициента использования ВД:
где
B
1
=
8 3
cos sin( ) sin ;
2 2 2
1
4
C
1
=
4 3
sin
3
2
.
Из (20.12) и (20.13) следует, что при пренебрежении углом
коммутации ( 0 ) A= B= B C C D
1 1
=0 и, следовательно,
cos
33
•BД
IEP
m
.
При этом, допуская 0 , получим
1 1
, тогдада
E U I I
m m m1 ï 1
; ( ) 0 и
111BД
cos
2
3
mm
IUP
. (20.14)
Примем, что ток в процессе коммутации изменяется линей-
но, тогда действующее значение этого тока с трапецеидальной
формой кривой [18] определяется из выражения
0
2
2
2
3
2
2
0
2
2
2
1
1
= td
t
itdItd
t
iI
KK
,
(20.15)
где
1 3b
- угол коммутации при линеаризации
коммутационного тока по условию равенства площадей кривых,
реальной и аппроксимированной [20];
b i
K
2 2 1( )
0,5
- поправочный коэффициент;
i
K 0,5
cos cos
cos cos
2
- значение коммутационного токаа
на половине периода коммутации ( t 2 ).
После интегрирования подкоренного выражения в (20.15) и
соответствующих подстановок получим
351
350
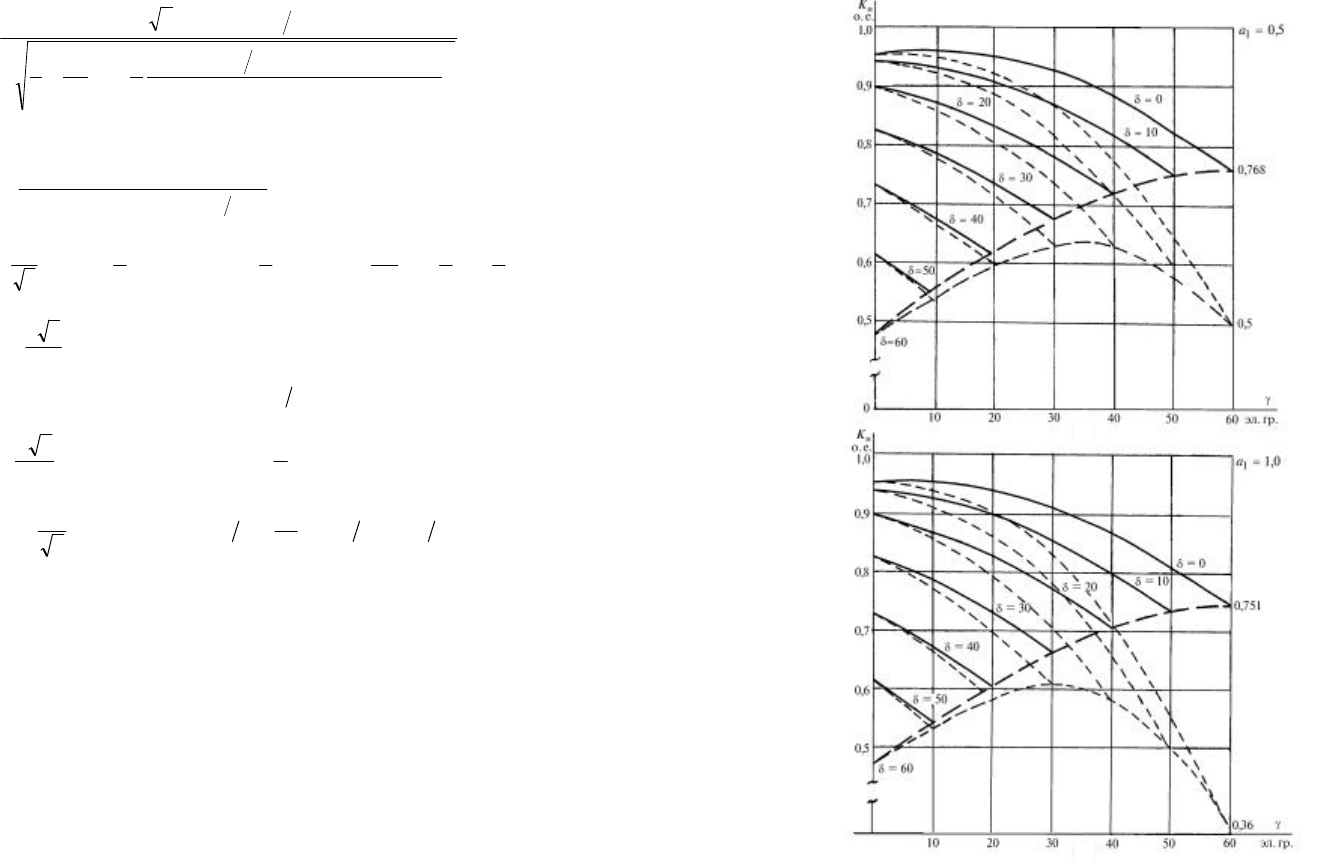
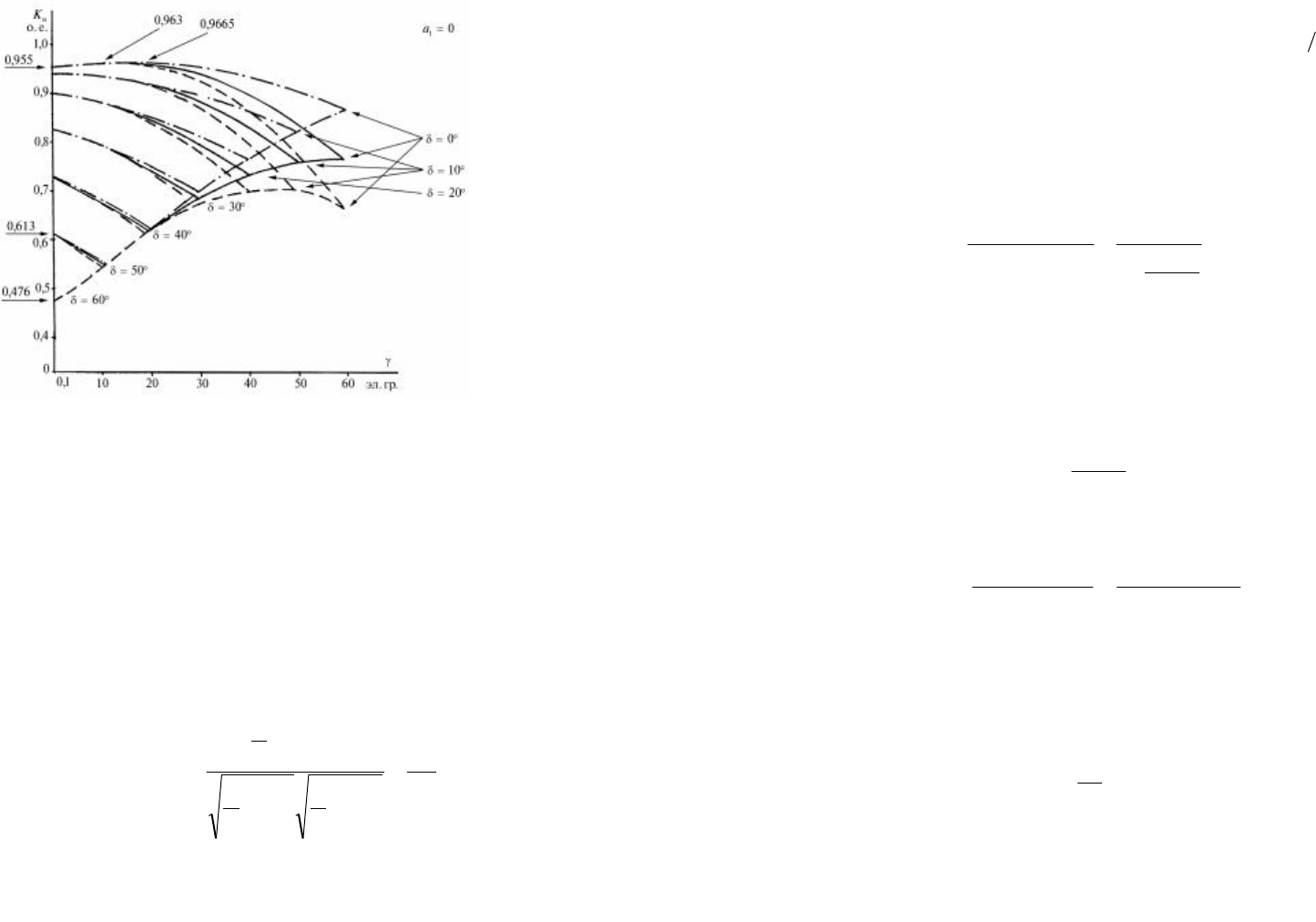
Рис. 20.4. Зависимость от параметров регулирования углом открывания
вентилей инвертора ----
0
1
; - - -
30
1
эл. град.
а
б
) + (cos cos
cos+ cos2+ cos2
3
2
1
33
2
)2( cos 6
И
K
K
, (20.19)
где
K
A + B B C C D
a
E=
( ) + ( ) + (0)
1 +
1 1
1
2
1
2sin ( )
;
A =
1
3
cos( ) cos sin( ) sin sin sin
2 2
1
12
2 2
2
;
B a a=
2 3
( + ) ( + )
1 1 1 1
1
3
2 2 2 1 1
2
sin cos sin sin
sin sin ;
C a=
4 3
1
2
1
2
1
3
cos ( ) sin ;
D a =
2
3
2 2
12
2 2
1 1
2
cos ( ) cos sin
.
При определении K
и
для синхронного двигателя с неявно
выраженными полюсами преобразовываются аналогично для
(20.19) коэффициенты В
1
и С
1
уравнения (20.13).
Зависимости К
и
с различными a
1
при фазе тока
0
1
и
30
, задаваемой системой управления инвертором и угле
нагрузки
30
, приведены на рис. 20.4, а, б и 20.5. Сопоставление
этих кривых с аналогичными, полученными в частности в [76],
указывает на количественное расхождение последних в сторону
завышения степени использования электрической машины,
особенно в области больших углов коммутации. Кроме того, анализ
кривых указывает на эффективное влияние на К
и
фазы тока и
степени выраженности полюсов ротора.
353
352
показывает, что при установленной мощности двигателя послед-
ний в схеме ВД будет нагреваться от Джоулевых потерь в
И
1 K
раз больше, чем эквивалентный двигатель постоянного тока. Если
опустить увеличение Джоулевых потерь от добавочных потерь в
обмотках якоря, полюсов и в стали двигателя, обусловленных
несинусоидальностью токов в токопроводящих контурах двигателя
и потоков - в магнитопроводящих контурах, то при
1
M
K
коэф-
фициент полезного действия ВД будет:
,
1
1
И
И
И
KP
P
PKP
KP
H
H
H
где Р
н
- номинальная мощность, снимаемая с вала синхронного
двигателя при сетевом питании;
P
- все Джоулевы потери при синусоидальной форме токаа
в контурах двигателя, принятые равными потерям в ВД без учета
добавочных потерь.
Если обозначить
P P
1
,
где
- номинальный
КПД синхронного двигателя, то КПД вентильного двигателя при
условии равенства потерь мощности в СД и ВД будет:
1)1(1
ИН
НИ
ННИ
НИ
НВД
K
K
K
K
, (20.20)
что означает уменьшение КПД вентильного двигателя по
сравнению с синхронным двигателем эквивалентной установленной
мощности.
При условии же равенства
НСДНВД
следует уменьшить
греющие потери по соотношению
P
И
1
k
раза,
т.е. расчетные потери
P
расчч
И
PK
, что приведет к уве-
личению габаритной мощности применяемого в схеме ВД
20.4. Коэффициент полезного действия
Этот важный энергетический показатель в общем случае
связан прежде всего с коэффициентом мощности вентильного
двигателя в электроприводе, несколько отличным от традици-
онного представления
cos
. Действительно, коэффициент
мощности ВД:
И
K
dtE
T
dtI
T
dtUI
T
k
TT
T
M
1
11
1
0
2
1
0
2
1
0
Рис. 20.5. Зависимость
И
K
от параметров регулирования
углом открывания вентилей инвертора и углом коммутации
-
-
-
1
30 ; ---
1
0 ; - - -
1
30
352

355
354
2. При применении синхронных двигателей с нерегулируемым
возбуждением путем рационального выбора соотношений между
продольным и поперечным реактансами возможно достижение их
максимального использования.
3. Синхронные двигатели с неявно выраженными полюсами
имеют относительно лучшие показатели по использованию их
активных материалов.
4. Сверхпереходная ЭДС синхронного двигателя,
используемого в режиме вентильного, зависит от степени
нагружения якоря током нагрузки, поэтому в системе ВД могут
иметь место перенапряжения якорной обмотки, уровень которых
должен быть учтен при определении прочности изоляции
применяемого класса вентилей инвертора.
синхронного двигателя. Поэтому при расчете и выборе мощности
вентильного двигателя в электроприводе следует оценивать
экономическую целесообразность того или иного возможного
варианта, а именно: систему со сниженным КПД электропривода
или систему с заранее завышенной габаритной мощностью
синхронного двигателя.
Кроме того, обмотка якоря ВД (статора СД) должна быть
рассчитана на повышенное междуфазное, или (что то же)
межвитковое, напряжение, что потребует усиления изоляции в пазу
синхронного двигателя и соответственно приведет к еще большему
уменьшению коэффициента использования синхронного двигателя.
Последнее обстоятельство повлияет также на массогабаритные
показатели используемого двигателя, обусловливая уменьшение
массы активного железа при данной линейной нагрузке по току, а
следовательно, ѕ снижение развиваемой ВД мощности при
расчетных потерях в железе. Кроме того, увеличение изоляции
паза обусловливает уменьшение теплоотдачи обмотки (меди), что,
в свою очередь, приведет к необходимости уменьшения плотности
тока и, как следствие, к уменьшению той же мощности на валу,
развиваемой ВД.
Если обозначить через К
п
- коэффициент уменьшения
мощности СД в схеме ВД вследствие неполного использования
паза машины от увеличения изоляции, то общий коэффициент
использования ВД будет K= К
и
К
п
и тогда КПД ВД будет
11
Н
Н
Н
Н
НВД
K
K
PKP
KP
,
что еще снижает КПД ВД по сравнению с его значением по (20.20).
На основании изложенного можно сделать следующие выводы:
1. При определении установленной мощности электрической
(синхронной) машины, используемой в системах вентильного
двигателя, необходимо, как минимум, учитывать влияние
коммутационного процесса, обусловленного сверхпереходными
реактивностями, а для двигателей малой мощности – также
активное сопротивление якорной обмотки.
357
356
магнитной, тепловой и механической нагрузках отдельных
элементов вентильного двигателя.
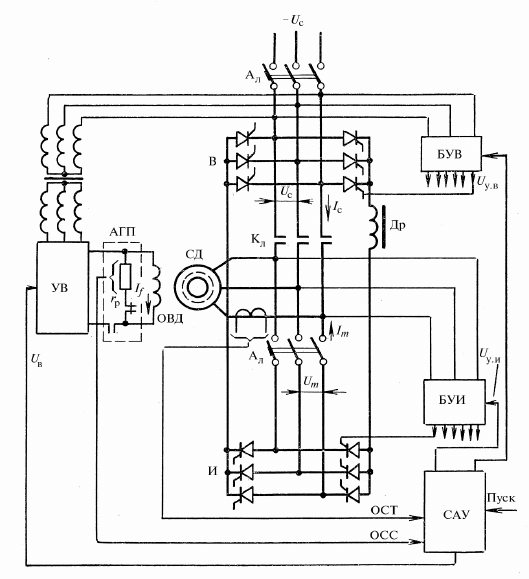
Рис. П.1. Принципиальная схема управления вентильным двигателем
постоянного тока: СД - синхронный двигатель; ОВД - обмотка
возбуждения СД; БУВ - блок управления выпрямителем; БУИ - блок
управления инвертором; УВ - управляемый возбудитель; r
р
- разрядное
сопротивление ОВД; АГП - автомат гашения поля СД; САУ - система
автоматического управления пуском вентильного двигателя; ОСТ, ОСС -
обратные связи соответственно по току и скорости СД; u
у. в
, t
у. и
, u
в
-
сигналы управления соответственно выпрямителем, инвертором и
возбудителем; А
Л
, А
П
- линейный и переключающий автоматы; K
Л
-
линейный контактор; Д
Р
- сглаживающий дроссель; U
c
, U
c
- напряжение
и ток сети постоянной частоты; U
m
, I
m
- напряжение и ток на выходе
инвертора; I
f
- ток возбуждения СД
П р и л о ж е н и е
ЭКСПЕРИМЕНТАЛЬНЫЕ И ПРОМЫШЛЕННЫЕ
СИСТЕМЫ С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ
П.1. Лабораторный макет, предназначенный
для экспериментального исследования
основных свойств вентильного электропривода
Экспериментальная проверка основных теоретических
положений и выводов, изложенных в предыдущих главах,
производилась на лабораторных макетах электропривода.
Принципиальная схема одного из них, состоящего из синхронного
двигателя ДС-102-8 мощностью 75 кВт и трехфазного мостового
преобразователя типа ПТТР-460-200, приведена на рис. П.1.
Синхронный двигатель имеет следующие данные:
75
н2
P
кВт,,
380
н
U
В;
141
н
I
А;
750
с
n
об/мин;
9,0cos
; соединение
обмоток статора - звезда.
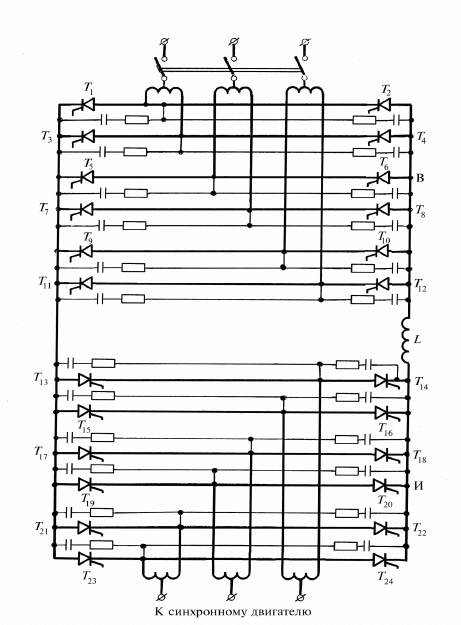
У преобразователя (рис. П.2) одна группа вентилей
121
TT
используется в качестве выпрямительной, другая (
2413
TT
) -
инверторной. Каждый вентиль шунтирован защитной r-C ветвью
с параметрами r = 20 Ом; C = 2 мкф.
Технические данные преобразователя:
напряжение питающей сети 380 В
частота сети 50 Гц
выпрямленный ток 200 А
выпрямленное напряжение 460 В
максимальная потребляемая мощность 120 кВ.А
Габаритные размеры преобразователя:
ширина 850 мм
глубина 600 мм
высота 2400 мм
На лабораторном макете установлены измерительные
устройства, которые позволяют судить об электрической,
359
358
которым плотно охватывается проводник с током. На подложку с
рабочей поверхностью 30
40 мм
2
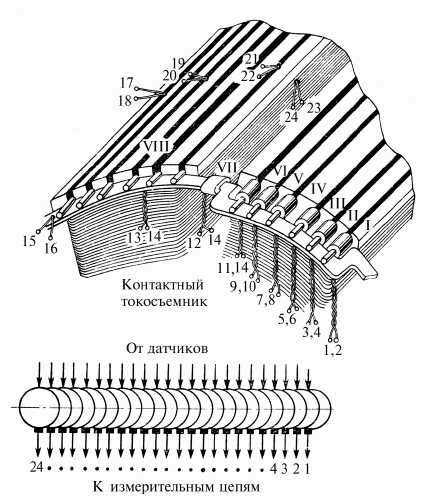
укладывалось 2600 витков.
Пояса установлены на всех шести стержнях полюса и меж-
полюсной перемычке (рис. П.3). Пояса фиксируются на вылетах
стержней между короткозамкнутым кольцом и торцовой частью
полюсного наконечника. Поскольку указанные вылеты у заводской
машины оказались недостаточными для размещения поясов, то
стержни одного полюса были заменены более длинными (удли-
нение составило 11%). Дополнительный вылет стержней произво-
дился на одну сторону, где устанавливались измерительные пояса.
В связи с этим перемычка, коротко замыкающая стержень данного
полюса, приобрела специальный вид.
После этой реконструкции ротор был статически и динамичес-
ки сбалансирован.
Пояса градуировались путем пропускания тока частоты 50 Гц
через первичные проводники. Градуировка состояла в снятии
выходных характеристик поясов
k
j
k
IfU
п
,
где
k
U
п
- действующее значение напряжения k-го пояса, мВ;
k
j
I
- действующее значение тока k-го стержня (перемычки), А.
Эти характеристки могут с достаточной точностью рас-
сматриваться как линейные. Их наклон определяется постоянными
поясов СА, мВ/А, напряжениями поясов, соответствующими
первичному току в 1 А с частотой 50 Гц.
Постоянные поясов составляют в среднем около 1 мВ/А.
Для нахождения добавочных потерь и моментов,
обусловленных совместной работой синхронной машины с
преобразователем частоты, представляет интерес экспери-
ментальное определение магнитной индукции в отдельных
элементах магнитной цепи машины. Для этой цели были
установлены две измерительные катушки - одна вокруг ярма якоря,
другая на центральном зубце полюсного наконечника ротора.
Ярмовая катушка (w
я
=20) одной стороной уложена в паз якоря,
другой - на его наружную поверхность.
Для определения значений и формы токов в стержнях и коротко-
замкнутых перемычках демпферной обмотки используются пояса
Роговского. Пояс Роговского представляет собой вторичную
обмотку воздушного трансформатора, первичной обмоткой
которого служит проводник с измеряемым током (в данном
случае – стержень, межполюсная перемычка). Обмотка из тонкого
провода (ПЭВ-1, диаметр 0,08 мм) наматывается на плоскую
подложку из электрокартона толщиной 1 мм, получается поясок,
Рис. П.2. Принципиальная схема силовой части преобразователя
вентильного двигателя постоянного тока мощностью 75 кВт
361
360
П.2. Регулируемый электропривод мощностью 4 МВт
питательного насоса котлоагрегата ТЭЦ
Опыт эксплуатации первой в электроэнергетической отрасли
СНГ системы регулируемого электропривода питательного насо-
са (ПЭН) мощностью 4 МВт котлоагрегата Новочебоксарской
ТЭЦ-3 на базе синхронного двигателя (СД) и полупроводникового
преобразователя частоты (ПЧ) с зависимым инвертором тока
(вентильного двигателя - ВД) позволяет сформулировать ряд
проблем на путях внедрения подобных систем на тепловых
электростанциях.
К электроприводу ПЭН с ВД, кроме норм, предусмотренных
действующими правилами устройств и эксплуатации
электроустановок, предъявлялись требования, обеспечивающие
частотный пуск и (при необходимости) автоматическую синхрони-
зацию СД с сетью собственных нужд (с.н.) станции; автоматиче-
ское регулирование (поддержание) подачи (или напора) воды в
интервале расчетных частот вращения (3000-2700 мин
-1
) при
условии совместной (параллельной) работы ПЭН с ВД с группой
нерегулируемых ПЭН на общий коллектор питающей воды.
Одновременно система электропривода должна обеспечивать
прямой пуск (или самозапуск) СД и работу в нерегулируемом
(синхронном) режиме с сетевым питанием. В случаях же неис-
правностей в ПЧ либо при нецелесообразности регулирования,
диктуемого технологическими требованиями, система управления
должна обеспечивать автоматическое переключение СД от ПЧ
на сеть с.н. Работа выполнялась по ряду директивных документов
АН СССР, ГКНТ и Минэнерго СССР [138].
Состав и схема электропривода. Система опытного образца
регулируемого электропривода (рис. П.4) питательного насоса по
техническому заданию АО ВНИИЭ была разработана и испытана
Чувашским университетом. Рижским отделением ПКТИ
"Теплоэлектропроект" (ныне "Силтумэлектропроект") разработан
рабочий проект. Тиристорный преобразователь частоты был
разработан НИИ НПО ХЭМЗ с участием АО ВНИИЭ и изготовлен
НПО ХЭМЗ. Приводным двигателем является серийный
Зубцовая катушка (w
з
=20) уложена в раскрытии двух соседних
пазов зубцов ротора.
Тепловой режим машины исследовался с помощью восьми
термопар, из которых три были установлены в трех симметрично
расположенных пазах статора, а остальные - на роторе (рис. П.3).
Электрические сигналы от измерительных датчиков, уста-
новленных на вращающемся роторе, снимались с помощью
контактного токосъемника, имеющего 24 медных кольца.
Электрическая связь контактных колец с датчиками осу-
ществлялась экранированными проводами через осевое отверстие
вала двигателя.
Рис. П.3. Эскиз расположения измерительных датчиков на роторе
синхронного двигателя мощностью 75 кВт: I-VII - пояса Роговского;
VIII - зубцовая катушка
363
362
Основные технические данные электропривода приведены
далее.
Тип электродвигат
е
ля
СТД-4000-2РУ4
Номинальная мощность, кВт 4000
Напряжение питания, В 6000
Фазный ток статора, А 439
Напряжение возбуждения, В 102
Номинальный ток возбуждения, А 283
Момент инерции ротора, кг•м
2
278
Синхронная частота вращения, мин
-1
3000
Критическая частота вращения, мин
-1
2400
КПД, % 97,5
cos
(опережающий), отн. ед. 0,9
Тип комплектного преобразователя ПЧВС-6,3/6-IIУХЛ4
Напряжение питания (при 50 Гц), В 6000
Номинальное выходное напряжение, В 6000
Номинальный ток в ходной (выходной) цепи,
А
428
Номинальная частота выходной цепи, Гц 50
Диапазон регулирования частоты 10:1
Силовая схема ПЧ
Статический возбудитель,
вх
о
дящий в ко
м
плект ПЧ типа
ТП-9; согласующий
трансформатор цепи
возбуждения типа ТСЗВ-
160/05;
сглаживающие
реакторы типа ТРОС-5000-
УХЛ4; т
о
коограничивающие
реакторы типа РБ- 10-630-056,
демпф
и
рующие входные и
выходные фильтры с
R-С
-
цепями
синхронный двигатель Лысьвенского турбогенераторного завода.
Комплектное распределительное устройство (КРУ) с масляными
выключателями, схемой управления, оборудованием защит,
автоматики и сигнализации, а также демпфирующие фильтры
разработаны и изготовлены Московским электрозаводом.
Трансформаторное оборудование, включая нетиповые сгла-
живающие дроссели и серийные токоограничивающие реакторы,
поставлялось Бакинским заводом сухих трансформаторов и
заводом "Уралэлектротяжмаш" соответственно. Панели управ-
ления разработаны и изготовлены на Чебоксарском электроап-
паратном заводе (ЧЭАЗ).
Компоновка всего силового электрооборудования реализована
на трехъярусной этажерке из ферменной конструкции, распо-
ложенной рядом с ПЭН, фундаментом которого является бетонная
эстакада высотой 4,5 м. На этой же отметке этажерки расположен
преобразователь с демпфирующими фильтрами, со шкафом
управления и статическим возбудителем. На нулевой отметке
этажерки расположено трансформаторное (тяжелое) оборудование,
а на высшей отметке (9 м) - КРУ. Для обслуживания оборудования
предусмотрены непрерывные проходы во все помещения с отметки
блочного щита (9 м) через КРУ до нулевой отметки этажерки.
Расчет на статическую и динамическую устойчивость кон-
струкций эстакады и этажерки выполнен с учетом виброак-
тивности системы электропривода с вентильным двигателем,
являющимся источником стационарных гармонических
возмущений, обусловленных добавочными колебательными
электромагнитными моментами [20], частота и расчетная
амплитуда которых приведены в табл. П.1.
Управление системой электропривода ПЭН (пуск, останов,
выбор режима работы, задание уровня потребного напора воды и
др.) осуществляется с блочного щита (БЩ) турбогенератора, а
контроль температур обмотки и железа статора, охлаждающего
воздуха СД и ПЧ - с местного щита ПЭН на отметке агрегата.
Структурная схема системы электропривода ПЭН с ВД приведена
на рис. П.5.