Alligood K., Sauer T., Yorke J.A. Chaos: An Introduction to Dynamical Systems
Подождите немного. Документ загружается.


C ASCADES
main focus will be families of one-dimensional maps, such as the quadratic family,
and families of area-contracting planar maps, such as the H
´
enon family.
Cascades consist of stable periodic orbits and so are experimentally ob-
servable. An experimenter will only be able to see a few of these stages. Some
state-of-the-art examples of cascades in experiments are shown in Lab Visit 12.
Renormalization theory has been extremely successful in showing that it is
possible for the full infinite sequence to exist. There are a number of regularities of
cascades, yielding universal numbers that are frequently observed in both physical
and numerical experiments. The chapter begins with the Feigenbaum constant,
one of these universal numbers. Challenge 12 is a more in-depth exploration of
this remarkable universal behavior.
12.1 CASCADES AND 4.669201609...
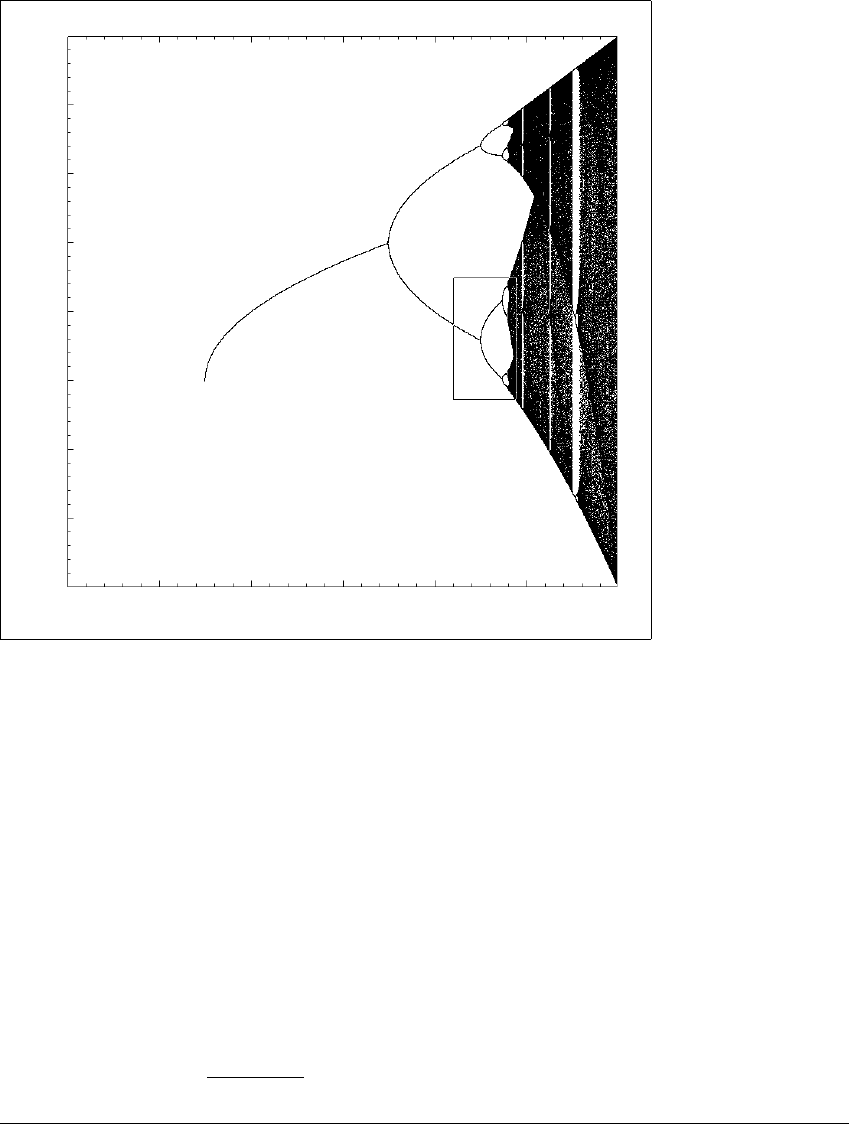
Figure 12.1 hints at the complexity present within a single bifurcation diagram.
The one-dimensional map used to generate the diagram is f
a
(x) ⫽ a ⫺ x
2
. Stable
periodic orbits of periods one, two, four, and eight are clearly visible in the
computer simulation. Factors of 2 beyond 8 are visible when the diagram is
magnified.
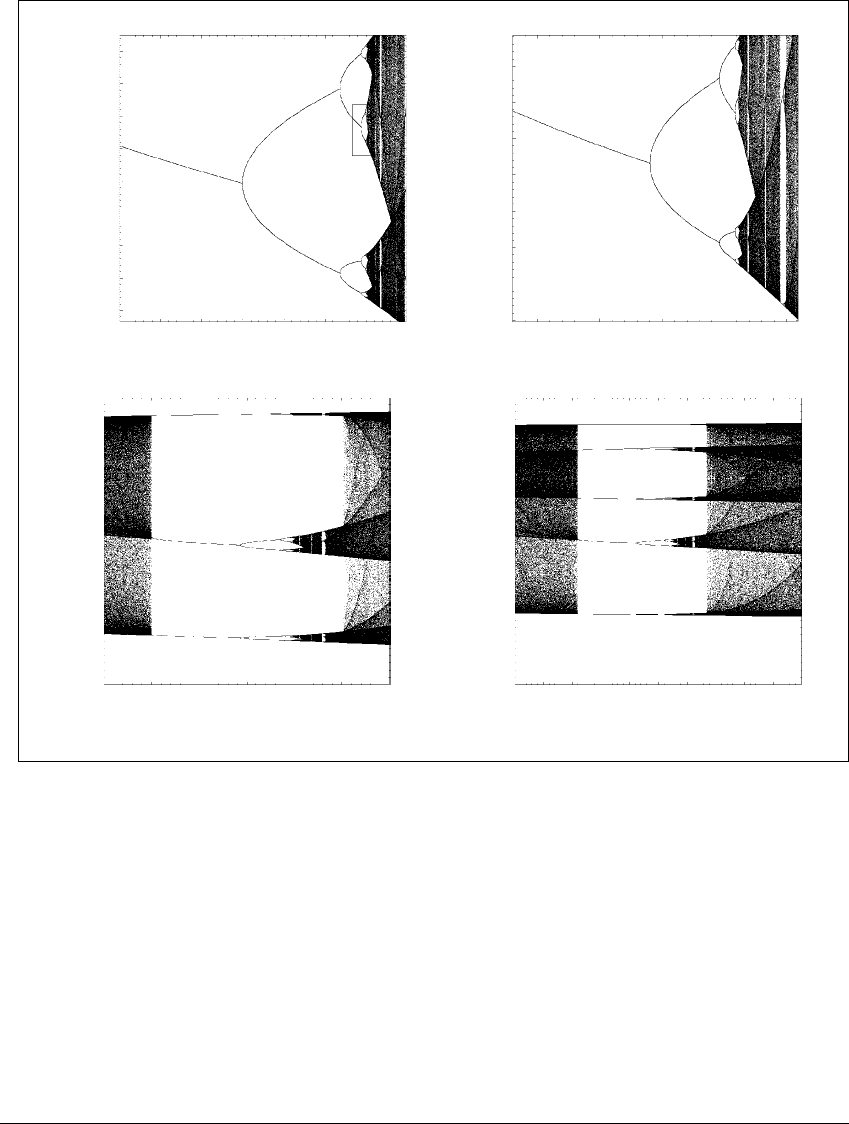
In addition to the period-doublings that we can see in Figure 12.1, there are
infinitely many that are not visible. Evidence of some of them can be seen in the
magnifications of Figure 12.2. At a period-doubling bifurcation from a period-k
orbit, two branches of period-2k points emanate from a path of period-k points.
When the branches split off, the period-k points change stability (going from
attractor to repeller, or vice versa). This change is detected in the derivative of
f
k
which, when calculated along the path of fixed points, crosses ⫺1.
Figure 12.2(a) shows a magnified view of the box drawn in Figure 12.1, and
together with the further magnification in Figure 12.2(b), shows period-doubling
bifurcations up to period 64. A period-doubling cascade can also occur from a
periodic orbit of higher period. Magnifications of the period three window of
Figure 12.1 are shown in Figure 12.2(c) A cascade beginning with sinks of periods
3, 6, 12,...can be seen. In Figure 12.2, the period five cascade exhibits sinks of
periods 5, 10, 20,....
The series of bifurcation diagrams shown in Figure 12.1, 12.2(a) and (b)
suggests a scaling behavior in the cascade of the quadratic map. In 1978, M. Feigen-
baum noted that the ratios of parameter distance between two successive period-
500
12.1 CASCADES AND 4.669201609. . .
2
x
⫺2
⫺1 a 2
Figure 12.1 Bifurcation diagram for the one-dimensional quadratic family
f
a
(
x
) ⴝ
a
ⴚ
x
2
.
The variable x is on the vertical axis, and the bifurcation parameter a is on the
horizontal axis. When a is fixed at a value less than ⫺1 4, the orbits of all initial
conditions diverge to ⫺
⬁
. There is a saddle-node bifurcation at a ⫽⫺1 4, at which
a period-one sink is created. It persists for ⫺1 4 ⬍ a ⬍ 3 4. At a ⫽ 3 4, the period-
one sink loses stability and is replaced with a period-two sink in a period-doubling
bifurcation. Higher values of a show further bifurcations that create more complex
attractors. For a ⬎ 2 there are no attractors.
doublings approach a constant as the periods increase to infinity. Moreover, this
constant is universal in the sense that it applies to a variety of dynamical systems.
Specifically, if the nth period-doubling occurs at a ⫽ a
n
, then
lim
n→
⬁
a
n⫺1
⫺ a
n⫺2
a
n
⫺ a
n⫺1
⫽ 4.669201609 ..., (12.1)
501
C ASCADES
0.25
x
⫺0.636
1.1 a 1.45
(a)
0.037
⫺0.121
1.383 a 1.406
(b)
2
x
⫺2
1.74 a 1.8
(c)
1.62 a 1.64
(d)
Figure 12.2 Universal behavior in the quadratic family.
(a) The box drawn in Figure 12.1 is enlarged to show many similarities to the full-
size diagram. Cascades occur on increasingly fine scales. (b) Enlargement of the box
in (a). (c) The period-three window in the quadratic family shows period-doubling
cascades. (d) The period-five window.
a number now known as Feigenbaum’s constant. Surprisingly, the limit is the
same for any one-parameter family of unimodal maps with negative Schwarzian
derivative. The first proof that this limit exists was given in (O. Lanford, 1982).
Table 12.1 shows a list of the parameters at which period-doublings occur
in the quadratic map f(x) ⫽ a ⫺ x
2
. The fixed point bifurcates into a fixed saddle
502
12.1 CASCADES AND 4.669201609. . .
Period Parameter
a
Ratio
2 0.75
4 1.25
8 1.3680989 4.2337
16 1.3940462 4.5515
32 1.3996312 4.6458
64 1.4008287 4.6639
128 1.4010853 4.6682
256 1.4011402 4.6689
Period Parameter
a
Ratio
3 1.75
6 1.7685292
12 1.7772216
24 1.7792521 4.2810
48 1.7796964 4.5698
96 1.7797923 4.6363
192 1.7798129 4.6524
Table 12.1 Feigenbaum’s constant in the quadratic map.
(a) A list of parameters a
n
at which the nth period-doubling bifurcation occurs in
the period-one cascade, along with the ratio (a
n⫺1
⫺ a
n⫺2
) (a
n
⫺ a
n⫺1
). (b) Same
for a period-three cascade of the quadratic map.
and a period-two attractor at a ⫽ 0.75, followed by a cascade of period-doublings.
Also shown are the bifurcation values for the period-three cascade of the quadratic
map.
A computer program to find the bifurcation parameter values uses a binary
search method. To begin the determination of a period-doubling bifurcation value,
say from period four to period eight, two values of the parameter a are chosen
that bracket the bifurcation point. The period of the orbit at the midpoint of
the bracketing interval is determined using the following simple method. First,
a long trajectory is created, in order to approach the current attracting orbit as
closely as possible. The period of the orbit is tested by comparing the current
point to later iterates of the point, within a small tolerance. When the period is
determined, either four or eight, the midpoint becomes a new endpoint of the
bracketing interval, replacing the endpoint that has the same period. The length
of the bracketing interval has been cut in two. By repeating this process, accurate
estimates of the bifurcation values of a cascade can be determined.
Table 12.2 contains a list of bifurcation values for two other cascades. Note
that the ratio (12.1) is repeated for the one-dimensional logistic family as well
as for the two-dimensional H
´
enon family. This version of the H
´
enon map, given
by f(x, y) ⫽ (a ⫺ x
2
⫺ 0.3y, x), is orientation-preserving (has positive Jacobian
determinant).
503

C ASCADES
Period Parameter
a
Ratio
2 3.0000000
4 3.4494896
8 3.5440903 4.7514
16 3.5644073 4.6562
32 3.5687594 4.6683
64 3.5696916 4.6686
128 3.5698913 4.6692
256 3.5699340 4.6694
Period Parameter
a
Ratio
2 1.2675000
4 1.8125000
8 1.9216456 4.9933
16 1.9452006 4.6337
32 1.9502644 4.6516
64 1.9513504 4.6630
128 1.9515830 4.6678
256 1.9516329 4.6688
Table 12.2 Feigenbaum’s constant in the logistic map and H
´
enon map.
(a) Parameter values of period-doubling bifurcations for f(x) ⫽ ax(1 ⫺ x). (b) The
ratio also approaches Feigenbaum’s constant for the H
´
enon map.
➮ COMPUTER EXPERIMENT 12.1
Locate the period-doubling cascade for the orientation-reversing H
´
enon
map f(x, y) ⫽ (a ⫺ x
2
⫹ 0.3y, x). Start with a ⫽ 0 and the fixed point (x, y) ⫽
(0, 0). Calculate the ratio of successive period-doubling intervals as in Table 12.2.
12.2 SCHEMATIC BIFURCATION DIAGRAMS
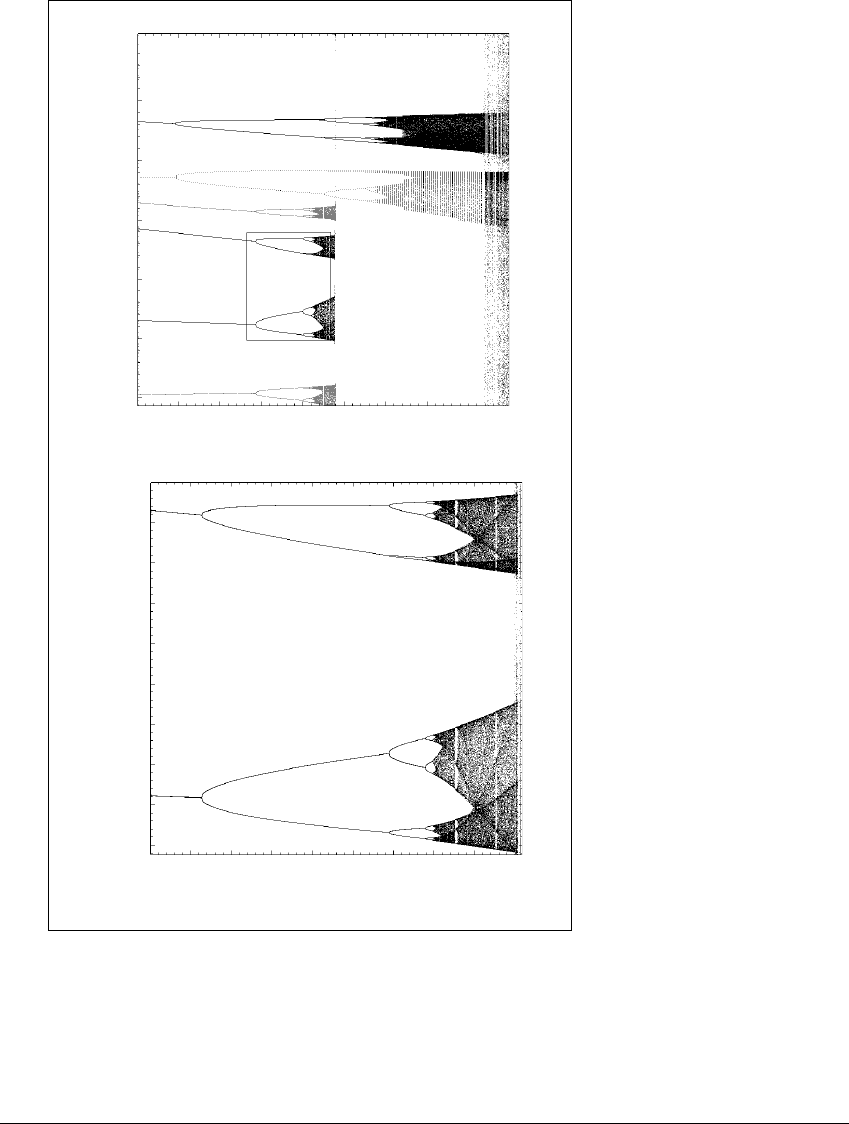
Figure 12.3 shows cascades in the development of four distinct chaotic attractors
occurring in the Poincar
´
e map of the forced, damped pendulum. Notice that
the attractors are simultaneously present for a certain range of the parameter.
Studying the dynamics here is complicated by the fact that we have no explicit
formula for the underlying Poincar
´
e map. Our aim in this section is to develop a
methodology for efficient analysis of bifurcation diagrams—to give a road map of
essential features, even when the underlying equations are unknown.
It is convenient to think of a schematic “tinker toy” model, consisting
of “sticks” and “sockets”, for the periodic orbits in our bifurcation diagrams.
The “sticks” are paths of hyperbolic orbits, all of one type—stable or unstable,
while the “sockets” are bifurcation orbits. For the remainder of this chapter, we
characterize hyperbolic orbits as stable or unstable, allowing the reader to translate
these words within the particular system of interest. For one-parameter families
of one-dimensional maps, the stable hyperbolic orbits are periodic sinks, while
504
12.2 SCHEMATIC B IFURCATION D IAGRAMS
⫺
2.60 2.78
(a)
⫺0.211
⫺2.040
2.653 2.693
(b)
Figure 12.3 Period-doubling cascades in the forced, damped pendulum.
(a) The development of four chaotic attractors is shown, in four varying shades
of gray/black. Each of two period-two sinks at the bottom of the diagram evolve
through period-doublings to a two-piece chaotic attractor. Two fixed-point sinks at
the top evolve to one-piece chaotic attractors. Several crises can be observed. (b) A
magnification of the one of the cascades beginning from a period-two sink is shown.
505

C ASCADES
the unstable hyperbolic orbits are periodic repellers. For one-parameter families
of area-contracting planar maps, stable orbits are periodic sinks, while unstable
orbits are saddles. These two examples are the primary settings in which we
observe cascades in this chapter.
We will find our bookkeeping simplified by considering the several points
of a periodic orbit as a single entity. This point of view sacrifices little, since our
primary focus is on the stability of the orbit, which is a collective property. Recall
that in order to determine the stability of a periodic orbit, all points in the orbit—
together with their derivatives (or Jacobian matrices)—must be calculated. For
example, assume that x
1
is a period-two point of f: f(x
1
) ⫽ x
2
and f(x
2
) ⫽ x
1
.
In order to find out the stability of the orbit, we must compute the eigenvalues of
Df
2
(x
1
) ⫽ Df(x
2
)Df(x
1
). Lemma 2 in Appendix A implies that the eigenvalues
of Df(x
2
)Df(x
1
) are identical to the eigenvalues of Df(x
1
)Df(x
2
) ⫽ Df
2
(x
2
). In
the one-dimensional case (see, for example, the Stability Test for periodic orbits
in Section 1.4), the derivative (f
k
)
is the same when evaluated at any of the k
points in a period-k orbit.
Therefore, we will think of a periodic orbit as a single object, with all points
in the orbit being represented by one point in our schematic model. The phrase
“derivative of a periodic orbit” will refer to the derivative of f
k
with respect to x
evaluated at any point in the orbit. (For phase space dimensions greater than one,
this phrase will have to be interpreted appropriately as an eigenvalue of D
x
f
k
.)
We always take k to be the minimum period of the orbit.
Figure 12.4 is a guide to the various types of periodic orbits we will encounter
in cascades. An unstable periodic point p of period k is called a regular repeller
if (f
k
)
(p) ⬎ 1; it is called a flip repeller if (f
k
)
(p) ⬍⫺1. In other words, we
have partitioned the set of hyperbolic periodic orbits into three subsets: stable,
regular unstable, and flip unstable. We call these sets S (for stable), U
⫹
(for
regular unstable), and U
⫺
(for flip unstable). Definition 12.1 makes precise what
the “sticks” are in our tinker-toy model.
Definition 12.1 A maximal path of hyperbolic fixed points or periodic
orbits is called a schematic branch (or just branch). In the case of a schematic
branch of periodic orbits, one point on the branch represents all points in one
orbit.
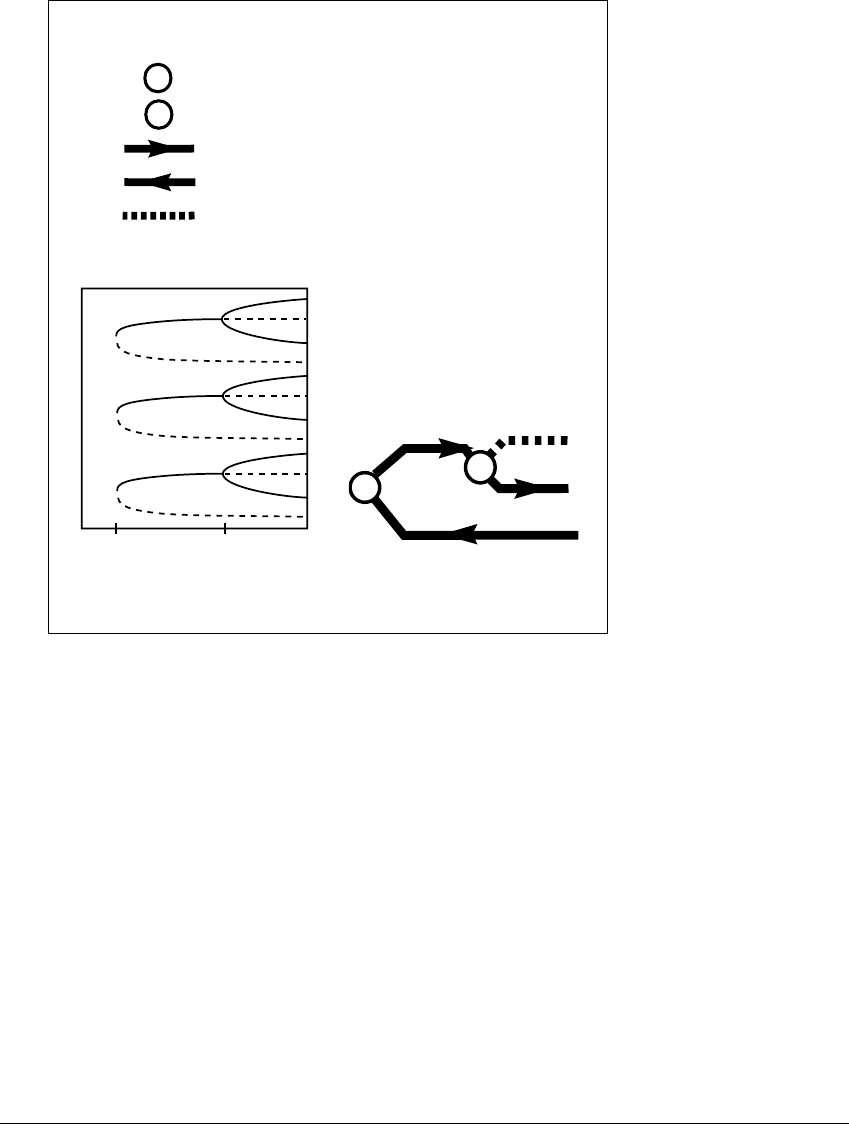
Figure 12.4(b) shows the bifurcation diagram of a family of maps with
a period-three saddle node and a period-doubling bifurcation from the path of
stable period-three orbits. A schematic bifurcation diagram representing the same
family appears in (c), with the bifurcation orbits drawn as circles. The saddle node
bifurcation is indicated schematically by a circle with a plus sign (⫹) inside it,
506
12.2 SCHEMATIC B IFURCATION D IAGRAMS
-
+
Saddle-node bifurcation
Period-doubling bifurcation
Branch of stable orbits
Branch of regular unstable orbits
Branch of flipped unstable orbits
e = +1
|e| < 1
e > 1
e < -1
e = -1
DESCRIPTIONNOTATION EIGENVALUE
B
B
U
U
S
+
+
-
-
(a)
a
0
a
1
+
-
3
6
3
3
(b) (c)
Figure 12.4 Elements of schematic diagrams.
(a) A saddle-node bifurcation is indicated schematically by a circle with a plus sign
(⫹) inside it. The saddle node orbit has derivative ⫹ 1 (or one eigenvalue equal
to ⫹1, in two or more dimensions). A period-doubling bifurcation is drawn with
aminussign(⫺). The map has derivative ⫺1 (or one eigenvalue equal to ⫺ 1) at
this orbit. Solid segments represent branches of stable orbits or branches of regular
unstable orbits, with the branches of stable orbits directed with an arrow pointed to
the right and the branches of regular unstable orbits directed to the left. All points
in an orbit are represented by one point in the schematic diagram. The dashed
schematic branch represents the three paths of flip unstable orbits. Regular unstable
orbits have exactly one eigenvalue larger than ⫹1, while flip unstable orbits have
exactly one eigenvalue smaller than ⫺1. The absolute values of all eigenvalues of
a stable orbit are smaller than 1. (b) The bifurcation diagram of a family of one-
dimensional maps with a period-three saddle node at a ⫽ a
0
and a period-doubling
bifurcation at a ⫽ a
1
from the stable period-three orbit is shown. A stable period-six
orbit appears at a
1
. (c) A schematic bifurcation diagram representing the family in
(b). The number next to a schematic branch represents the period of orbits on the
branch.
507
C ASCADES
representing the ⫹1 derivative of that orbit, while the period-doubling bifurcation
is drawn with a minus sign (⫺). A saddle node of period three occurs in the logistic
family for a slightly less than 3.83. The bifurcation diagram for this family is given
in Figure 1.7(b).
Notice that emanating from the saddle node in Figure 12.4(c) there are
two solid schematic branches: one branch, with an arrow directing it to the right,
represents all three paths of stable period-three orbits in (b); the other branch,
directed to the left represents the three paths of unstable U
⫹
orbits in (b).
Emanating from the period-doubling bifurcation orbit in (c) is a solid schematic
branch directed to the right, representing the six paths of stable period-six orbits
in (b). (The rationale for putting arrows on the branches is not apparent now,
but will become clear in Section 12.3.) The dashed schematic branch represents
the three paths of U
⫺
orbits in (b).
✎ E XERCISE T12.1
Why do the three period-doubling bifurcation points in Figure 12.4(b) occur
at the same parameter value?
In schematic diagrams, such as Figure 12.4, points on the branches represent
fixed points or periodic orbits that are isolated. As we saw in Chapter 11, if p is a
hyperbolic fixed point of f, then there is a neighborhood N in phase space that
excludes other fixed points. What about higher-period orbits? Since p is also a
fixed point of f
k
, and (f
k
)
(p) ⫽⫹1, there is a neighborhood N
k
in phase space
(perhaps smaller than N)suchthatp is the only fixed point of f
k
in N
k
;thatis,
there are no period-k points in N
k
.
✎ E XERCISE T12.2
Assume that p is a hyperbolic fixed point. Let 兵p
n
其 be a sequence of periodic
points such that p
n
→ p, and, for each n, let t
n
be the (minimum) period of
p
n
. Explain why lim
n→
⬁
t
n
⫽
⬁
.
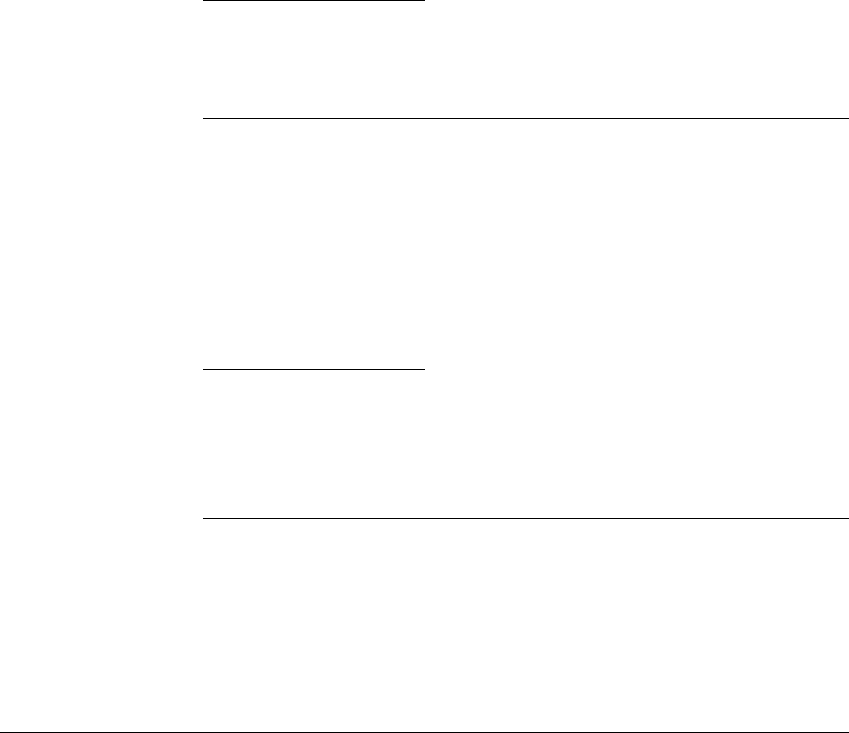
How do schematic branches end? Suppose we try to follow the branch
containing a particular hyperbolic fixed point at a ⫽ a
0
. Let G be the portion
of this branch in [a
0
,
⬁
) ⫻ ⺢. Figure 12.5 shows portions of four such schematic
branches. Now assume that there exists a parameter value a
1
, with a
1
⬎ a
0
, such
that G does not extend to a
1
. What can happen to G between a
0
and a
1
?One
possibility is that G may become unbounded in x-space. In other words, the
508
12.2 SCHEMATIC B IFURCATION D IAGRAMS
G
1
G
2
G
3
G
4
V
a
0
a
1
-
Figure 12.5 How schematic branches can end.
Schematic branch G
1
leaves the compact region V ⫻ [a
0
,a
1
] through the boundary
of V;branchG
2
ends in a period-doubling bifurcation; branch G
3
ends in a line
segment of fixed points; and G
4
extends through the parameter interval [a
0
,a
1
].
absolute values of points on G go to infinity as or before G reaches a
1
. Otherwise,
there exists a bounded set V in x-space such that G remains in V; G 傺 [a
0
,a
1
] ⫻ V.
Since G is a path, it is defined as the graph of a function
: J → V, where
J is an interval of real numbers. That is, G ⫽ 兵(a,
(a)) : a 僆 J其. It follows that
there exists a parameter value a
e
such that [a
0
,a
e
) 傺 J 傺 [a
0
,a
e
]. We argue that
J is open-ended on the right side. Suppose, on the contrary, that J contains the
endpoint a
e
. Then G has at least one fixed point p at a ⫽ a
e
, according to Exercise
T12.3. Since p is hyperbolic, G must extend beyond a
e
(by Definition 11.6 and
Theorem 11.7, Chapter 11), a contradiction.
The “half-branch” G must have at least one limit point at a
e
. By continuity
of the map, this point (or points) is fixed. By the above argument, any limit
points of G that are not in G must be nonhyperbolic. Depending on the map,
these nonhyperbolic fixed points may or may not be bifurcation orbits.
✎ E XERCISE T12.3
(a) Show that if G is a path of fixed points defined on [a
0
,a
e
), and if
G is bounded, then G has at least one limit point at a ⫽ a
e
. (b) Show that
any limit points of G are fixed points.
509